ROS开发之如何使用发布者、订阅者和话题消息?
文章目录
- 0、引言
- 1、创建发布者(velocity发布者 →geometry话题消息→turtlesim订阅者)
- 2、创建订阅者(turtlesim发布者→turtlesim话题消息→pose订阅者)
- 3、自定义话题消息
- 4、使用自定义话题消息(person发布者→自定义话题消息→person订阅者)
0、引言
<font笔者因研究课题涉及ROS开发,学习了古月居出品的ROS入门21讲,为巩固话题通信(用于不断更新、少逻辑处理的数据处理场景)知识,本文将ROS的发布者、订阅者和话题消息三讲内容进行总结。
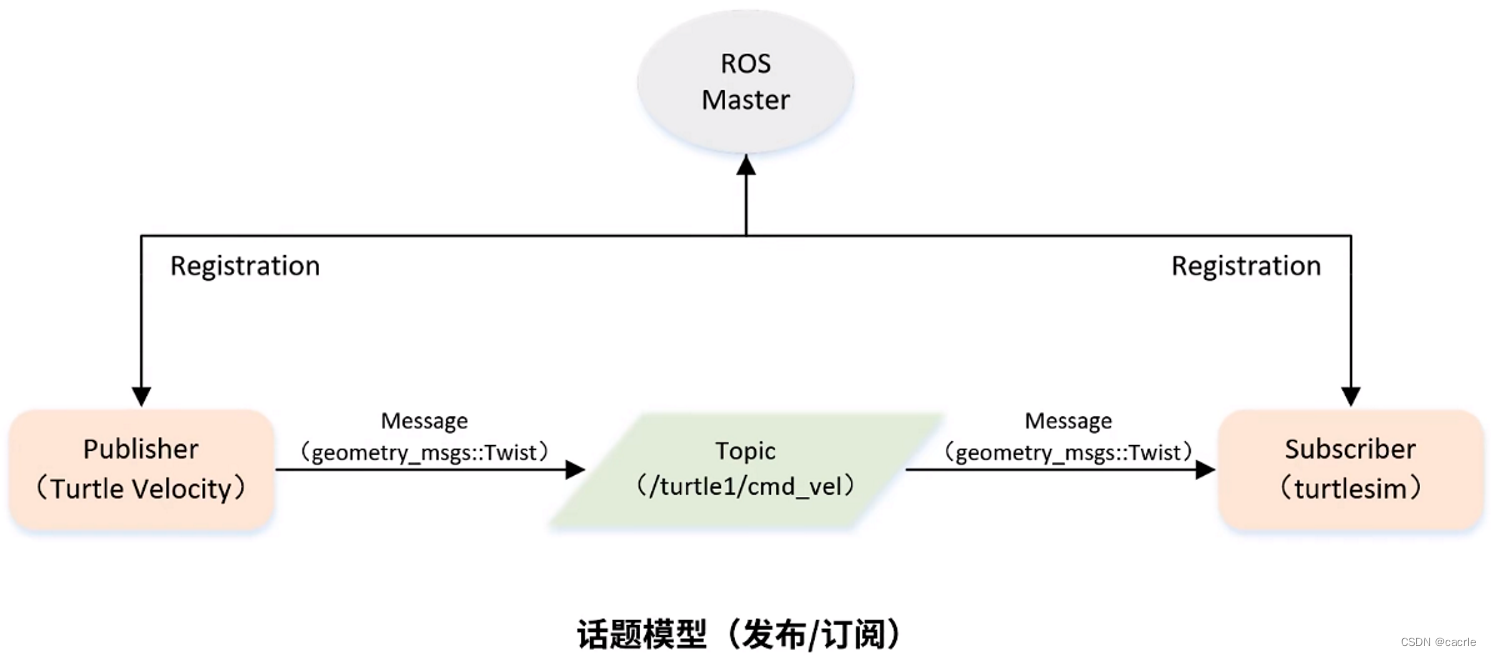
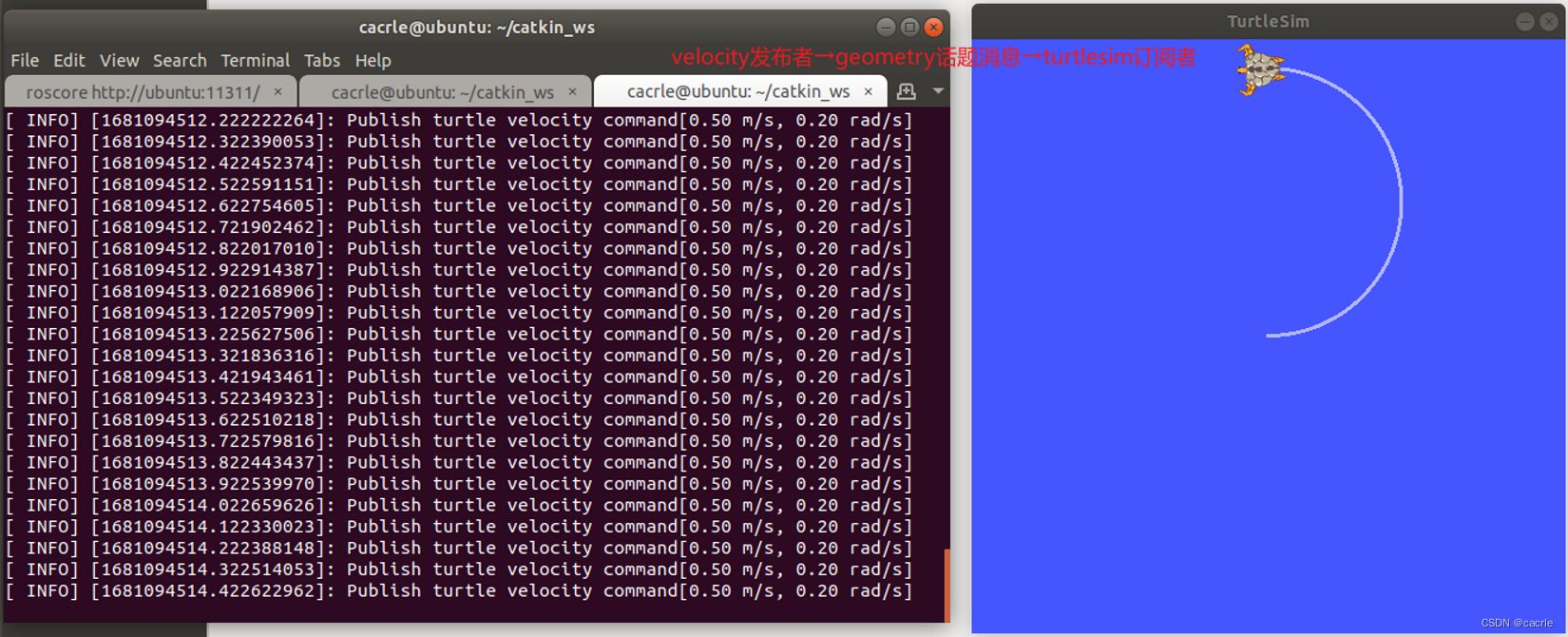
1、创建发布者(velocity发布者 →geometry话题消息→turtlesim订阅者)
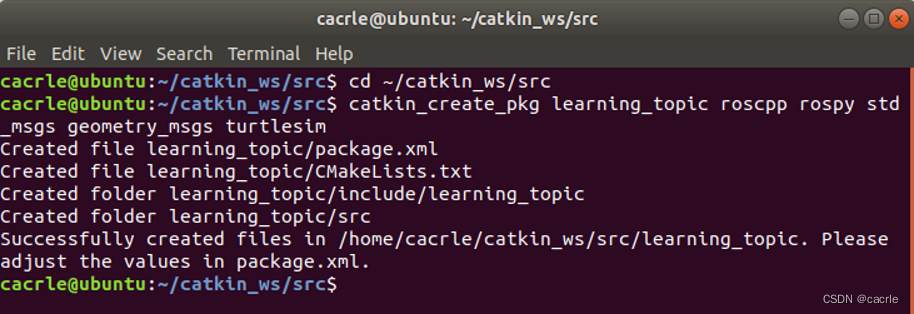
(1)创建功能包;
cd ~/catkin_ws/srccatkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
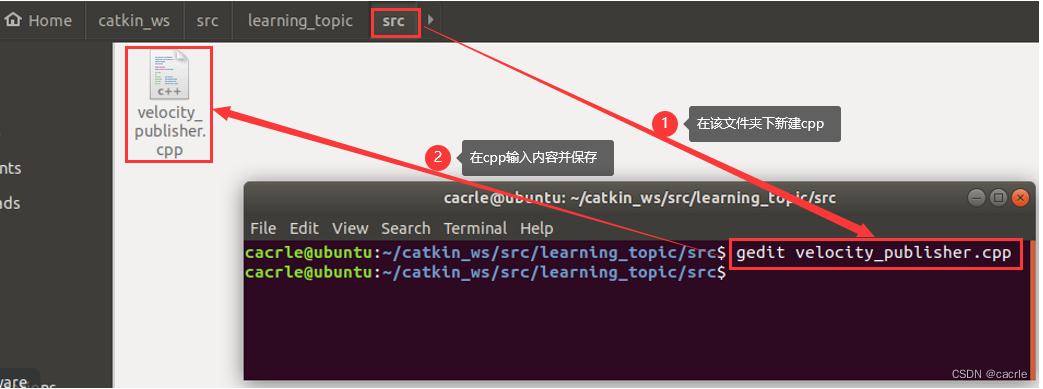
(2)创建发布者cpp文件;
在新建的功能包下src中打开新终端,并键入:gedit velocity_publisher.cpp,输入以下代码并保存。
/*** 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{// ROS节点初始化ros::init(argc, argv, "velocity_publisher");// 创建节点句柄ros::NodeHandle n;// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);// 设置循环的频率ros::Rate loop_rate(10);int count = 0;while (ros::ok()){// 初始化geometry_msgs::Twist类型的消息geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.5;vel_msg.angular.z = 0.2;// 发布消息turtle_vel_pub.publish(vel_msg);ROS_INFO("Publish turtle velocity command[%0.2f m/s, %0.2f rad/s]",vel_msg.linear.x, vel_msg.angular.z);// 按照循环频率延时loop_rate.sleep();}return 0;
}
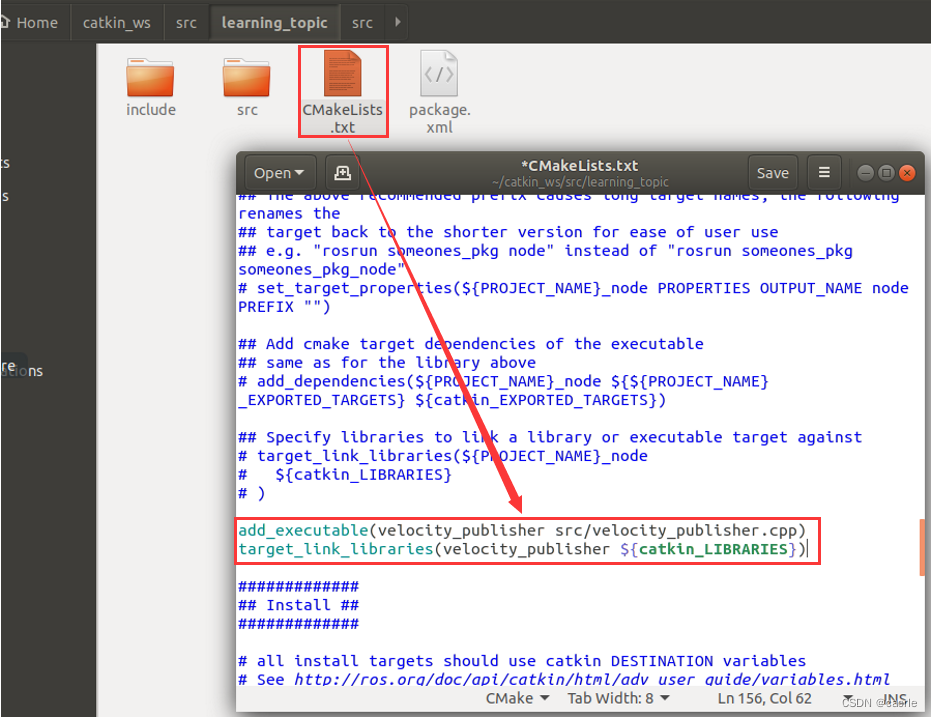
(3)在CMakeLists.txt添加编译规则;
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
(4)编译并运行发布者。
①编译并启动roscore;
cd ~/catkin_wscatkin_make
或
catkin_make_isolatedsource devel/setup.bash
或
source devel_isolated/setup.bashroscore
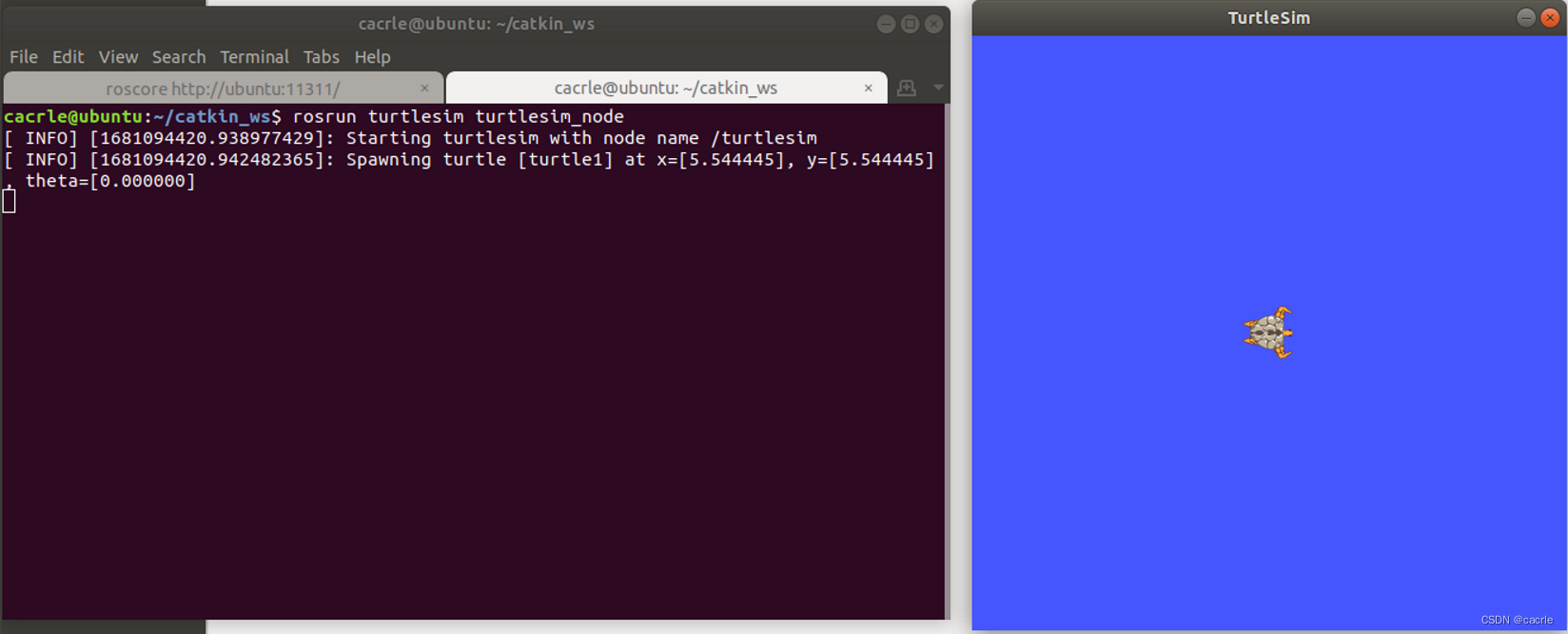
②新建终端,运行海龟结点;
rosrun turtlesim turtlesim_node
③新建终端,运行发布者;
//每新打开一个终端,需要重新定义源
source devel/setup.bash
或
source devel_isolated/setup.bashrosrun learning_topic velocity_publisher
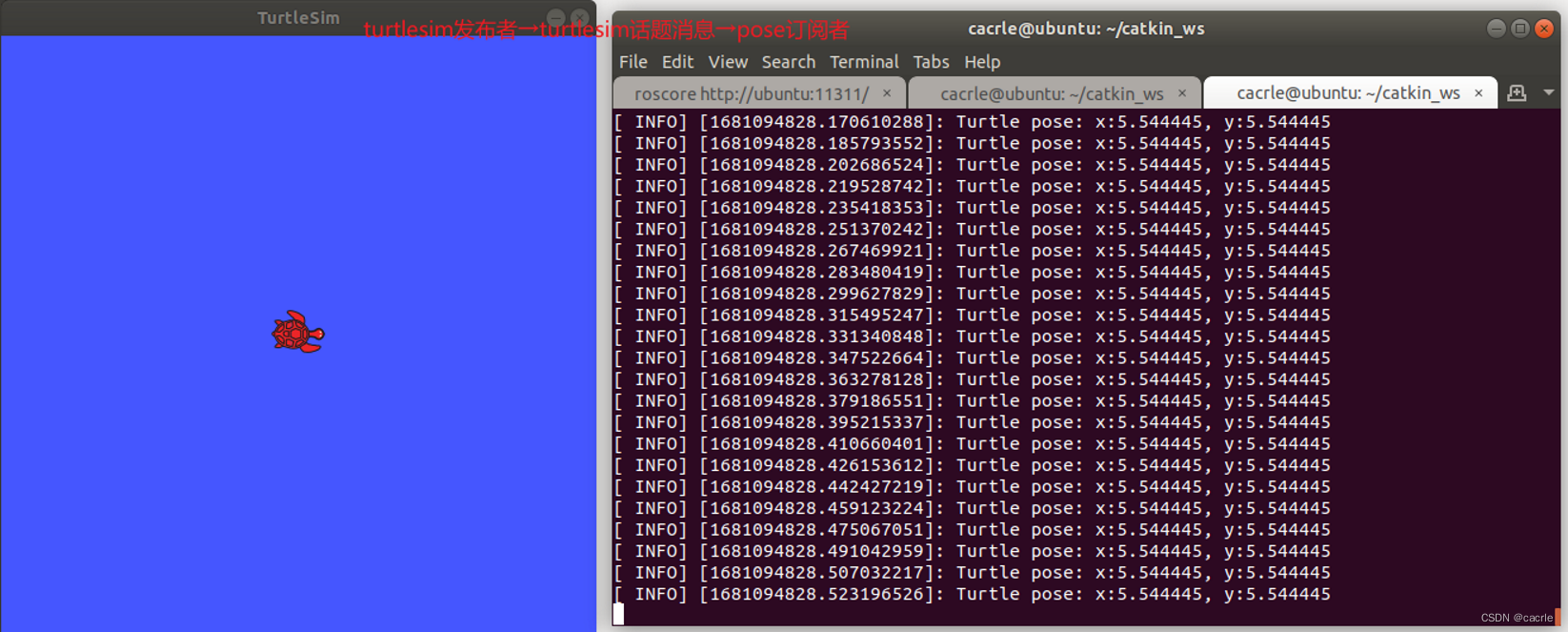
2、创建订阅者(turtlesim发布者→turtlesim话题消息→pose订阅者)
(1)在发布者功能包下创建订阅者cpp文件;
在新建的功能包下src中,终端键入:gedit pose_subscriber.cpp,输入以下代码并保存。
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose*/#include <ros/ros.h>
#include "turtlesim/Pose.h"// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{// 将接收到的消息打印出来ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "pose_subscriber");// 创建节点句柄ros::NodeHandle n;// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallbackros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);// 循环等待回调函数ros::spin();return 0;
}
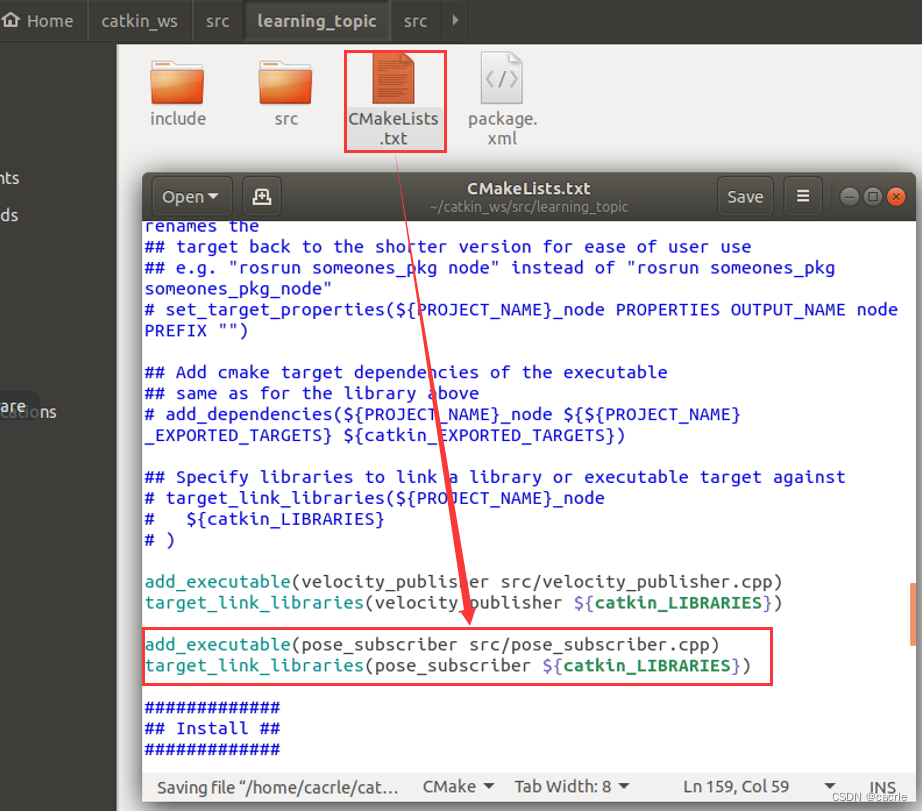
(2)在CMakeLists.txt添加编译规则;
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
(3)编译并运行订阅者。
①编译并启动roscore;
cd ~/catkin_wscatkin_make
或
catkin_make_isolatedsource devel/setup.bash
或
source devel_isolated/setup.bashroscore
②新建终端,运行海龟结点;
rosrun turtlesim turtlesim_node
启动发布者后,海龟将进行匀速圆周运动。
③新建终端,运行订阅者;
//每新打开一个终端,需要重新定义源
source devel/setup.bash
或
source devel_isolated/setup.bashrosrun learning_topic pose_subscriber
④新建终端,运行海龟键盘动态结点。
rosrun turtlesim turtle_teleop_key
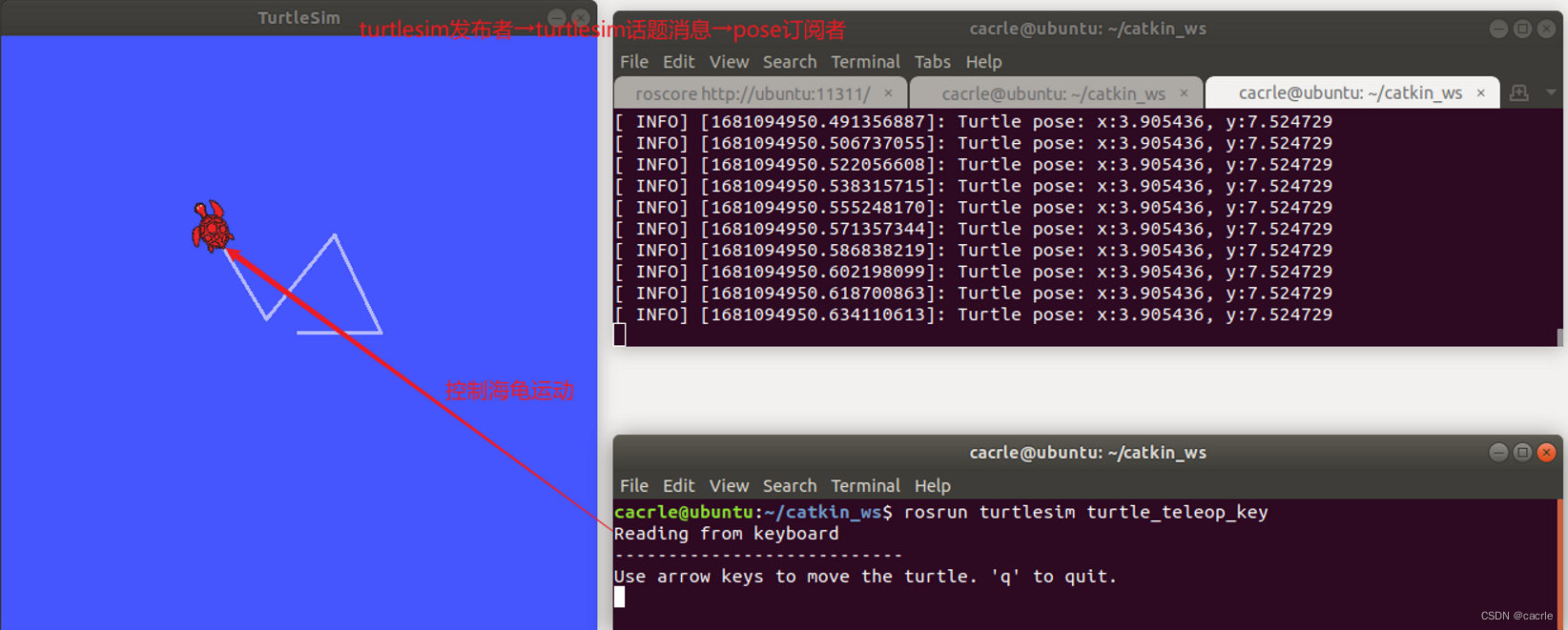
在该终端下,可通过键盘方向键手动控制海龟移动。
3、自定义话题消息
(1)创建.msg文件;
在~/catkin_ws/src/learning_topic目录下,新建msg目录,并进入该目录,在该目录下打开终端,键入:gedit Person.msg,输入以下内容,并保存。
string name
uint8 sex
uint8 age
string x
string yuint8 unkonwn = 0
uint8 male = 1
uint8 female = 2

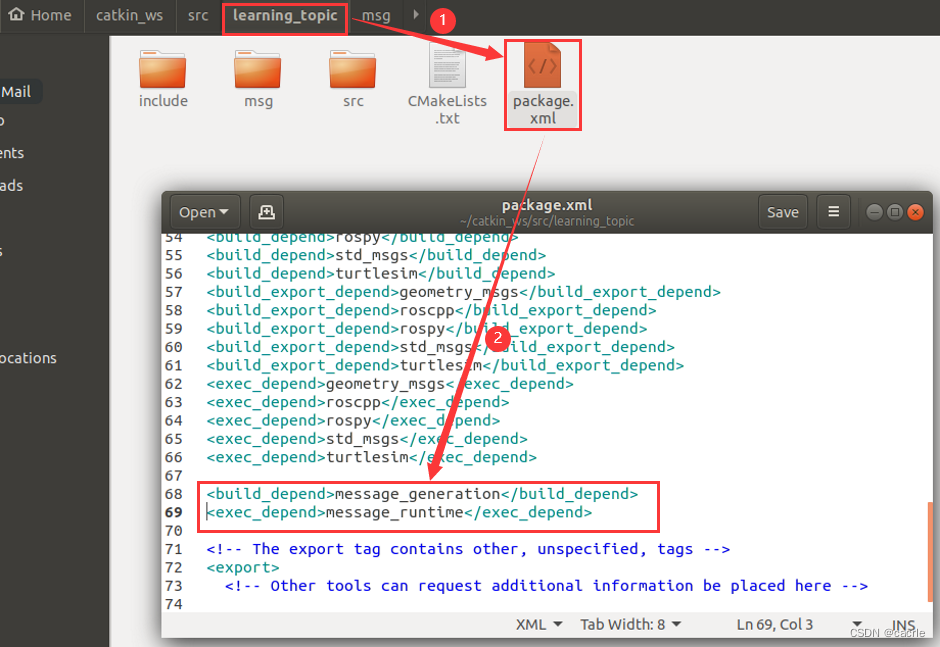
(2)在package.xml中添加功能包依赖;
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
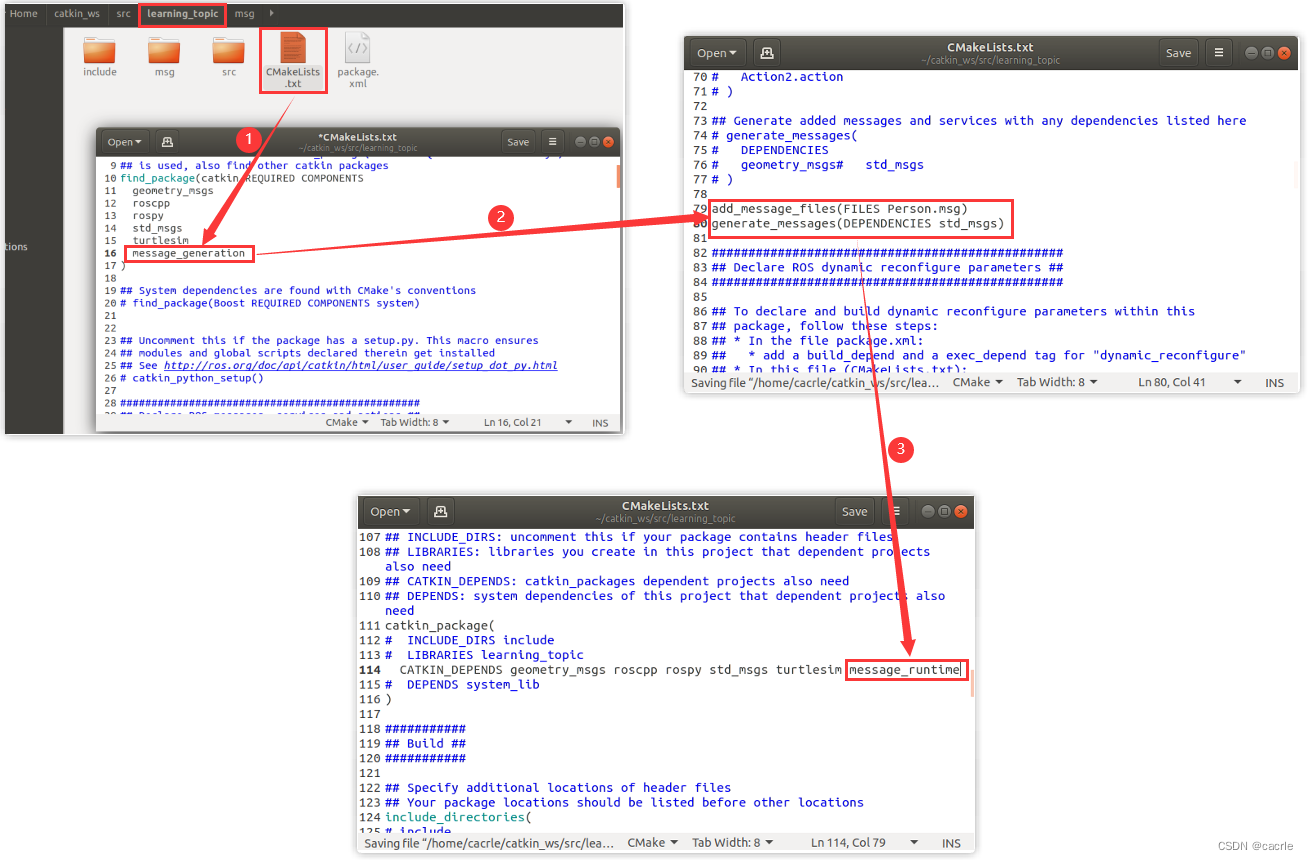
(3)在CMakeLists.txt添加编译规则。
//在find_package下,添加message_generation//在合适位置添加以下内容
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)//在catkin_package,添加message_runtime
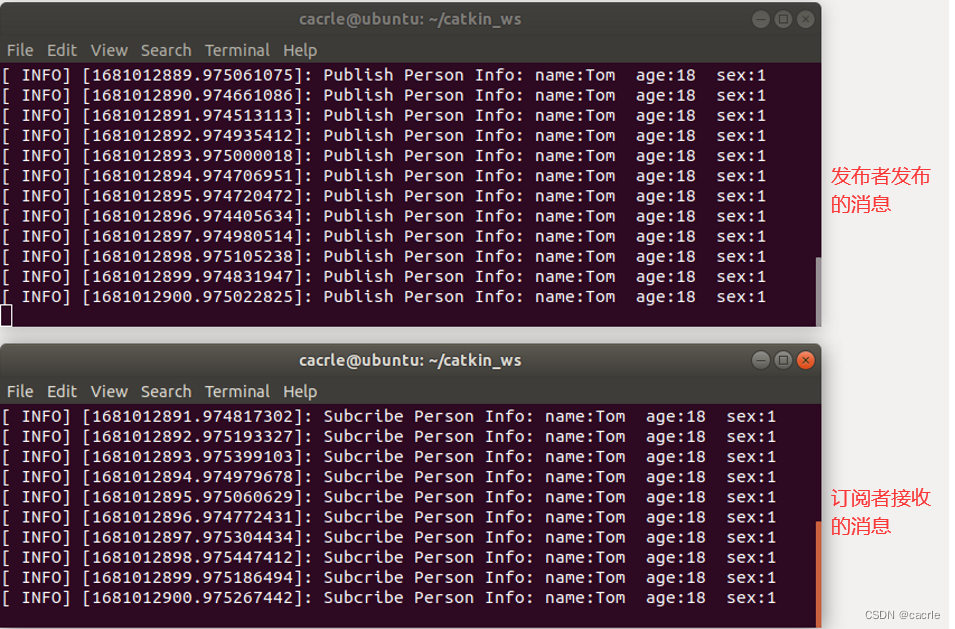
4、使用自定义话题消息(person发布者→自定义话题消息→person订阅者)
(1)创建测试消息的发布者;
在~/catkin_ws/src/learning_topic/src目录下打开终端,键入:gedit person_publisher.cpp,输入以下代码,并保存。
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程将发布/person_info话题,自定义消息类型learning_topic::Person*/#include <ros/ros.h>
#include "learning_topic/Person.h"int main(int argc, char **argv)
{// ROS节点初始化ros::init(argc, argv, "person_publisher");// 创建节点句柄ros::NodeHandle n;// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10ros::Publisher person_info_pub = n.advertise<learning_topic::Person>("/person_info", 10);// 设置循环的频率ros::Rate loop_rate(1);int count = 0;while (ros::ok()){// 初始化learning_topic::Person类型的消息learning_topic::Person person_msg;person_msg.name = "Tom";person_msg.age = 18;person_msg.sex = learning_topic::Person::male;// 发布消息person_info_pub.publish(person_msg);ROS_INFO("Publish Person Info: name:%s age:%d sex:%d", person_msg.name.c_str(), person_msg.age, person_msg.sex);// 按照循环频率延时loop_rate.sleep();}return 0;
}
(2)创建测试消息的订阅者;
在~/catkin_ws/src/learning_topic/src目录下打开终端,键入:gedit person_subscriber.cpp,输入以下代码,并保存。
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person*/#include <ros/ros.h>
#include "learning_topic/Person.h"// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_topic::Person::ConstPtr& msg)
{// 将接收到的消息打印出来ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d", msg->name.c_str(), msg->age, msg->sex);
}int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "person_subscriber");// 创建节点句柄ros::NodeHandle n;// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallbackros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);// 循环等待回调函数ros::spin();return 0;
}
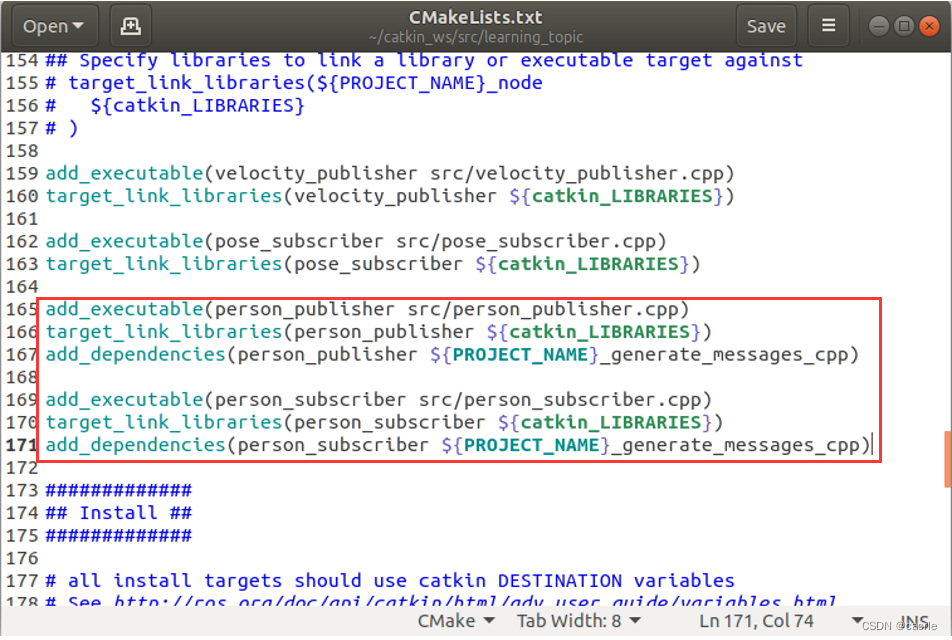
(3)在CMakeLists.txt添加编译规则;
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
(4)编译运行。
cd ~/catkin_wscatkin_make
或
catkin_make_isolatedsource devel/setup.bash
或
source devel_isolated/setup.bashroscore//新建终端,然后再执行以下代码
cd ~/catkin_ws
source devel/setup.bash
或
source devel_isolated/setup.bash
rosrun learning_topic person_publisher//新建终端,然后再执行以下代码
cd ~/catkin_ws
source devel/setup.bash
或
source devel_isolated/setup.bash
rosrun learning_topic person_subscriber
参考资料:
[1] 古月居GYH. 【古月居】古月·ROS入门21讲 | 一学就会的ROS机器人入门教程; 2019-07-16 [accessed 2023-04-09].
[2] ~Old. ROS——话题通信; 2022-03-18 [accessed 2023-04-09].
[3] Maccy37. OS查询话题具体内容常用指令; 2020-09-04 [accessed 2023-04-10].
[4] 李徕徕. ROS(4)--------------------ros::Rate loop_rate( ) & loop_rate.sleep()&ros_spin()&ros_spinOnce(); 2020-07-29 [accessed 2023-04-10].
[5] 小萌虫. ROS21讲; 2021-08-13 [accessed 2023-04-10].
相关文章:
ROS开发之如何使用发布者、订阅者和话题消息?
文章目录0、引言1、创建发布者(velocity发布者 →geometry话题消息→turtlesim订阅者)2、创建订阅者(turtlesim发布者→turtlesim话题消息→pose订阅者)3、自定义话题消息4、使用自定义话题消息(person发布者→自定义话…...

基于Java+Springboot+vue高校资源共享交流平台设计和实现
博主介绍:✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专…...

收藏! 38个Python数据科研库
通用的数据科学库,即那些可能被数据科学领域的从业人员用于广义的,非神经网络的,非研究性工作的库: 数据-用于数据管理,处理和其他处理的库 数学-虽然许多库都执行数学任务,但这个小型库却专门这样做 机…...

SpringBoot过滤器获取Bean-请求重复可读-获取请求体数据-用户IP归属地获取
文章目录一.获取Bean二. Request重复可读三. 过滤器获取Body请求体数据四.用户ip获取一.获取Bean 网上一些论调说Filter无法注入Bean的原因是加载顺序: listener—>filter—>servlet导致的.我不赞同. 原因:默认机制下,在SpringBoot应用启动时,IOC…...

有哪些特别小众而有趣的编程语言呢?
相对较小众的编程语言,还要有趣?发表一些个人看法,如果不对大家口味,大家轻喷,留情留情。 Rust:Rust是一种系统编程语言,致力于提供高性能、可靠性和安全性。Rust具有内存安全和线程安全的特性&…...

vue中使用高德
首先我们要申请高德地图的key,当前升级过后高德地图使用也需要加上安全秘钥 注册账号 访问高德地图开发平台根据实际情况填写就可以🍜(实名认证的时候选择个人就可以,如果是企业级的项目,可能会涉及人员变动…...
React class组件和hooks setState异步更新数据详解
一、 class组件setState详解 1.class组件setState异步更新数据详解 class Father extends React.Component{state {num:0}addHandler () > { this.setState({num: 100})console.log(state中的值,this.state.num)}render() { return (<div><button onClick{this…...

ToBeWritten之嵌入式操作系统
也许每个人出生的时候都以为这世界都是为他一个人而存在的,当他发现自己错的时候,他便开始长大 少走了弯路,也就错过了风景,无论如何,感谢经历 转移发布平台通知:将不再在CSDN博客发布新文章,敬…...

git 实际开发中使用-解决问题
前言 git代码版本管理工具,打破常规的物理传输,更新,合并,回滚提高了开发效率和可追溯性。 网上的资料会把所有的命令都很全也很多,导致对刚刚了解的同学不友好,很难实际使用。 每个人都有自己使用git的习…...

新星计划·2023-第1期 - Python赛道报名入口 -〖你就是下一个新星〗
↓↓↓报名方式:(下滑到本页面底部)重要提醒:这里是 新星计划2023-第1期 - Python赛道报名入口,一经报名,不可更换。报名入口点击此处跳转 一、新星计划 新星计划是一个以发掘潜力新人、培养优质博主为目…...
Android LowMemoryKiller概述
Agenda Low memory killer 概述 内核空间LMK ULMK‐vmpressure ULMK‐PSI Low memory killer 概述 lowmemorykiller的作用就是当内存比较紧张的时候去及时杀掉一些对用户来说不那么重要的进程,回收内存,保证手机的正常运行。安卓平台lowmemorykiller机…...
特殊操作流——案例:游戏次数
需求:请求程序实现猜数字小游戏只能试玩三次,如果还想玩,提示:游戏已经结束,想玩请充值(www.itcast.cn) 思路: 写一个游戏类,里面有一个猜数字的小游戏 写一个测试类&am…...
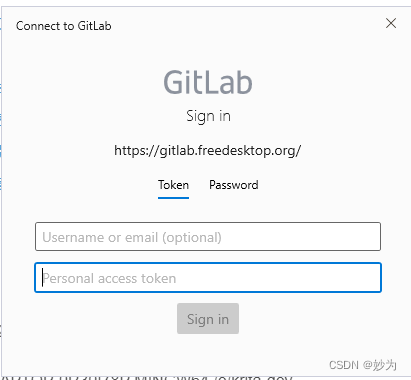
git clone connect to gitlab sign in token弹窗让我输入用户名和密码
系列文章目录 文章目录系列文章目录前言前言 当我使用git bash输入命令:git clone https://gitlab.freedesktop.org/raqm/raqm.git libraqm 弹窗 ASUSLAPTOP-0R30I78P MINGW64 /e/krita-dev $ git clone https://gitlab.freedesktop.org/raqm/raqm.git libraqm C…...

【Blender】如何在Blender中添加HDRI环境贴图
什么是HDRI环境贴图 环境贴图或HDRI贴图是在Blender中照亮3D场景并实现逼真效果的最有效和最快捷的方法之一。 HDRIs本质上是现实世界照明的快照,其中包含高动态范围成像(HDRI)的准确照明细节。HDRI是一个包含亮度信息(从暗…...
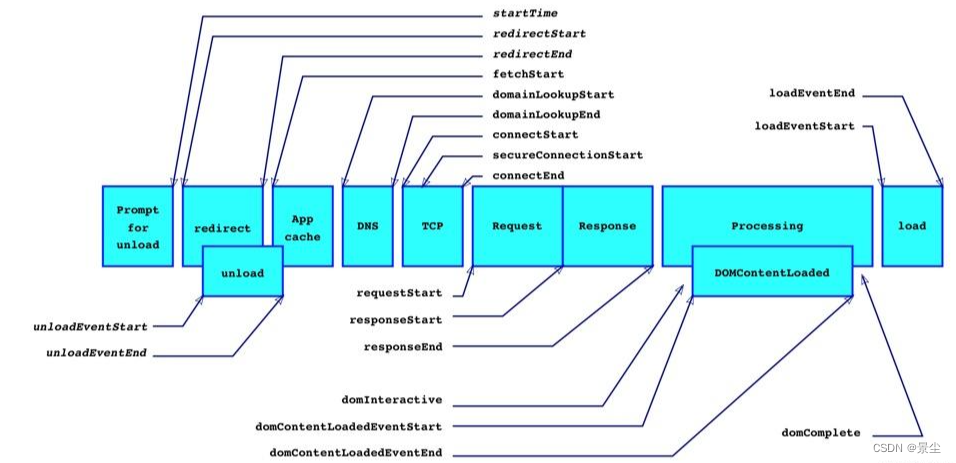
前端监控指的是什么?
前端监控分为三个方面: 异常监控(监控前端页面的报错)性能监控(监控页面的性能)用户行为监控(监控用户的行为,计算PV、UV、在线时间等、数据监控即我们常说的埋点 例子1 在后端突然上线了某个需…...

.net core 面试题 2023
文章目录1. 什么是 ASP.net core2. .net 术语3. 托管资源 和 非托管资源4. GC 和 垃圾回收5. .net中所有类的基类6. 如何实现对象的深拷贝7. 依赖注入,为什么使用依赖注入8. IOC容器的注入方法9. ASP.net core 中 服务生命周期10. scoped的 service 可以注入到 sing…...

和ChatGPT关于Swing music的一场对话(上篇)
什么是 Swing Music ? Swing Music 是一款漂亮的自托管音乐播放器,适用于您的本地音频文件。就像一个更酷的 Spotify …但带上你自己的音乐。 第一次在 reddit 上看到 Swing Music,就被其 UI 吸引了 但源码站点的releases 中只有 windows 和 …...
java版工程项目管理系统源码 Spring Cloud+Spring Boot+Mybatis+Vue+ElementUI+前后端分离 功能清单
ava版工程项目管理系统 Spring CloudSpring BootMybatisVueElementUI前后端分离 功能清单如下: 首页 工作台:待办工作、消息通知、预警信息,点击可进入相应的列表 项目进度图表:选择(总体或单个)项目显示1…...
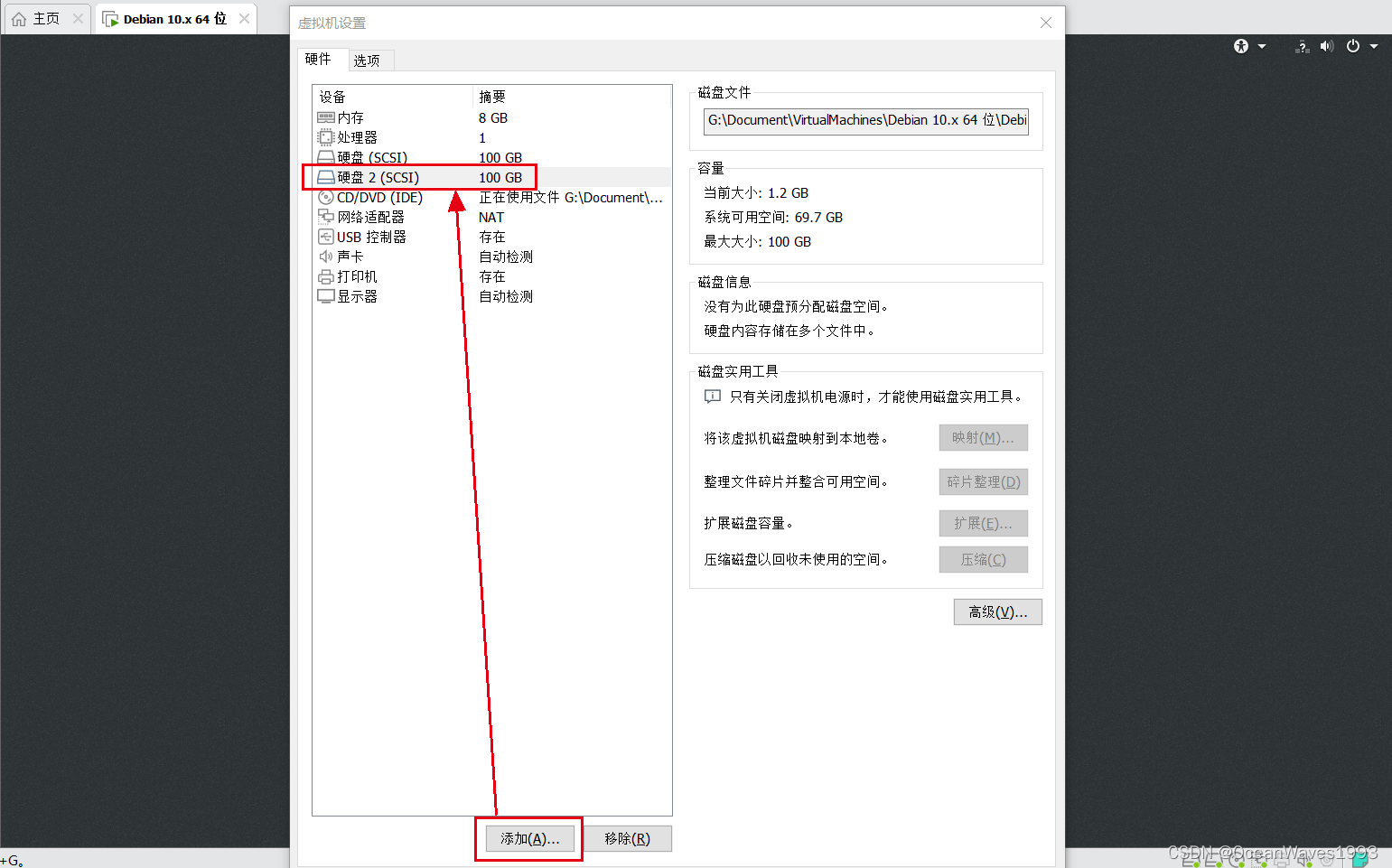
debian 10 扩展分区容量
debian 10 扩展分区容量1、扩展分区原因2、添加一块磁盘3、命令记录3.1、新增加的磁盘是/dev/sdb3.2、使用磁盘/dev/sdb 创建物理卷3.3、 把物理卷/dev/sdb加入到卷组debian-vg中3.4、查看物理卷、逻辑卷3.5、扩展逻辑卷/tmp3.6、逻辑卷组debian-vg 空余空间被用掉10g 还剩90g可…...
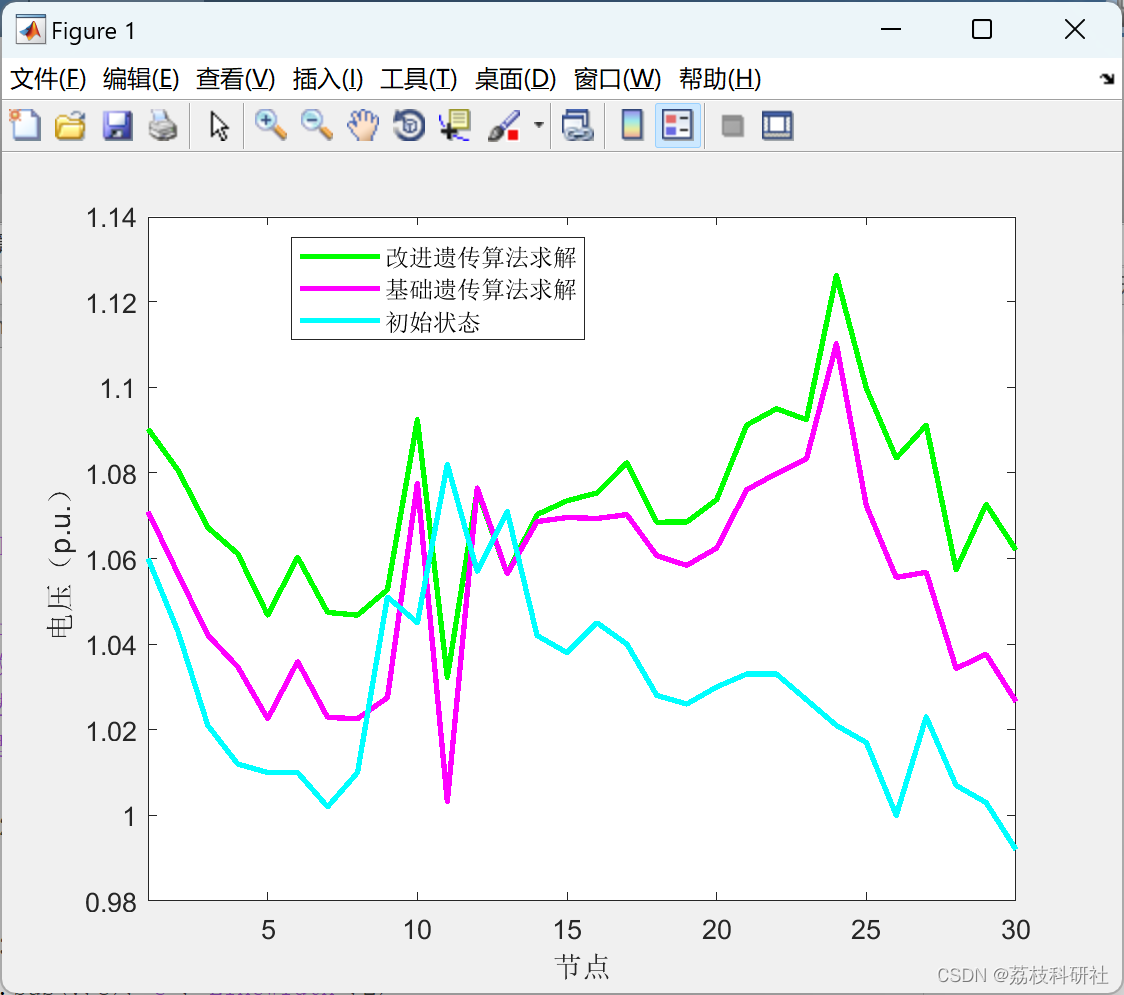
【无功优化】基于改进遗传算法的电力系统无功优化研究【IEEE30节点】(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

文明降级指南:回归纸笔躲避AI监控
AI监控时代的测试者困境在软件测试领域,人工智能的渗透已从效率工具演变为一种全景式的监控架构。AI驱动的测试套件能够以前所未有的速度执行用例、预测缺陷并生成报告,将测试周期与人力成本压缩至惊人水平。然而,这一技术乌托邦的背后&#…...

学术论文解析神器!OpenDataLab MinerU智能文档理解实测体验
学术论文解析神器!OpenDataLab MinerU智能文档理解实测体验 1. 前言:当AI遇见学术论文 对于每一位科研工作者、学生或技术从业者来说,阅读和整理学术论文都是一项既基础又繁重的工作。你是否也曾经历过这样的场景:面对一篇几十页…...

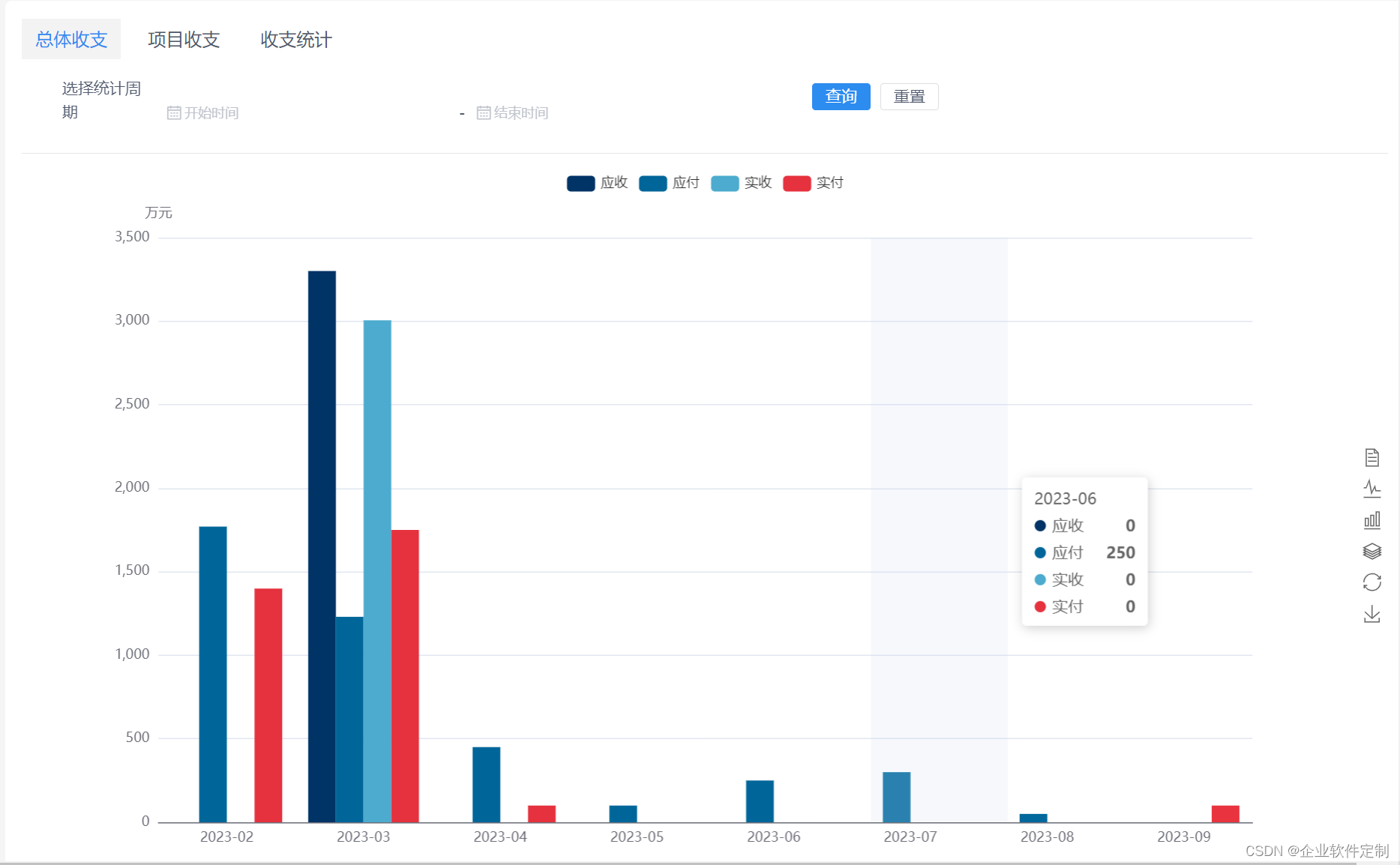
告别手动抄表!WinCC结合SQL Server和Excel,打造车间级设备运行数据看板
工业数据可视化实战:用WinCCSQL Server构建车间级智能看板 在制造业数字化转型浪潮中,车间设备数据的可视化呈现已成为提升生产效率的关键环节。传统的人工抄表方式不仅耗时耗力,更难以实现数据的实时分析和历史追溯。本文将介绍如何利用Win…...

Python开发者实战:用pg-mcp轻松搞定PostgreSQL集群读写分离与连接池管理
Python开发者实战:用pg-mcp轻松搞定PostgreSQL集群读写分离与连接池管理 现代Web应用对数据库的要求越来越高,特别是在高并发场景下,传统的单一数据库连接方式往往成为性能瓶颈。作为Python开发者,我们经常需要在Flask或Django项目…...

springboot+vue基于web的高校网上订餐平台设计系统
目录同行可拿货,招校园代理 ,本人源头供货商系统功能模块分析技术实现要点特色功能扩展项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作同行可拿货,招校园代理 ,本人源头供货商 系统功能模块分析 后台管理模块 管理员登录与权…...

FastAPI测试报告集成:CI/CD状态显示完全指南
FastAPI测试报告集成:CI/CD状态显示完全指南 【免费下载链接】fastapi FastAPI framework, high performance, easy to learn, fast to code, ready for production 项目地址: https://gitcode.com/GitHub_Trending/fa/fastapi FastAPI作为一款高性能、易学习…...

foobox-cn:重塑foobar2000视听体验的智能界面解决方案
foobox-cn:重塑foobar2000视听体验的智能界面解决方案 【免费下载链接】foobox-cn DUI 配置 for foobar2000 项目地址: https://gitcode.com/GitHub_Trending/fo/foobox-cn 你是否曾因音乐播放器界面过于简陋而错失沉浸式的听觉享受?当功能性凌驾…...

舰艇推进电机供电流程优化方案
舰艇推进电机供电流程优化方案 第一章 绪论 1.1 背景与意义 现代舰艇(如驱逐舰、潜艇、全电推进船舶)广泛采用综合电力系统。传统的供电流程中,推进电机作为最大的非线性负载,其负载突变(如急加速、倒车、波浪冲击导致的螺旋桨甩尾)会通过直流母线回馈至发电机组,导致…...

事务隔离级别全景解析:从脏读到幻读的深度剖析
事务隔离级别全景解析:从脏读到幻读的深度剖析在数据库并发控制的宏大叙事中,事务隔离级别扮演着“交通规则”的角色。当多个用户同时访问和修改数据时,如果没有合理的隔离机制,数据的一致性和完整性将面临巨大风险。本文将深入探…...
和段(Segment)在 SAP 中关系非常紧密,但它们的设计目的和应用场景有本质区别)
利润中心(Profit Center)和段(Segment)在 SAP 中关系非常紧密,但它们的设计目的和应用场景有本质区别
利润中心(Profit Center)和段(Segment)在 SAP 中关系非常紧密,但它们的设计目的和应用场景有本质区别。简单来说,段(Segment)是利润中心的一个上级归类。它们之间通常是“一对多”的…...