Python机器学习:支持向量机
这是我读本科的时候第一个接触到的机器学习算法,但也是第一个听完就忘的。。。
他的基本思想很简单:想办法把一个样本集划成两个部分:对于空间中的样本点集合,我们找到一个超平面把这个样本点集合给分成两个部分,其中一部分是正类,另一部分是反(负)类,支持向量机的优化目标就是找到一个超平面,使得空间中距离超平面最近的点到超平面的几何间距尽可能大,这些点就被称为支持向量。
首先得了解几个概念:
一、最大间隔和超平面:
和之前的一样,我们给定一个样本集合然后设定:
,设输入空间中的一个超平面为:
其中,是超平面的法向量,b为偏置,决定超平面的位置,根据点到直线的距离公式的扩展,空间中一点
到超平面
的欧氏距离为:
如果超平面可以把所有样本点分成两类,那实际上, 点到超平面
的欧氏距离就是一个分段函数:
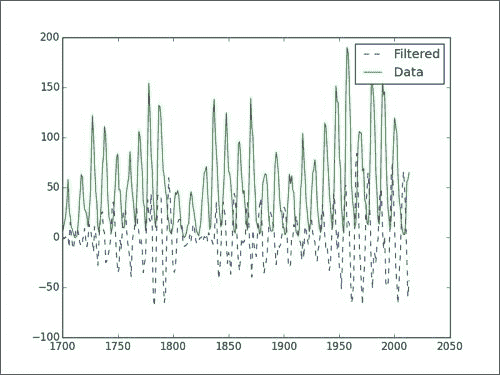
好了,基本上把最大间隔和超平面给了解清楚了,说白了,就是,emm,我画个图来展示一下:
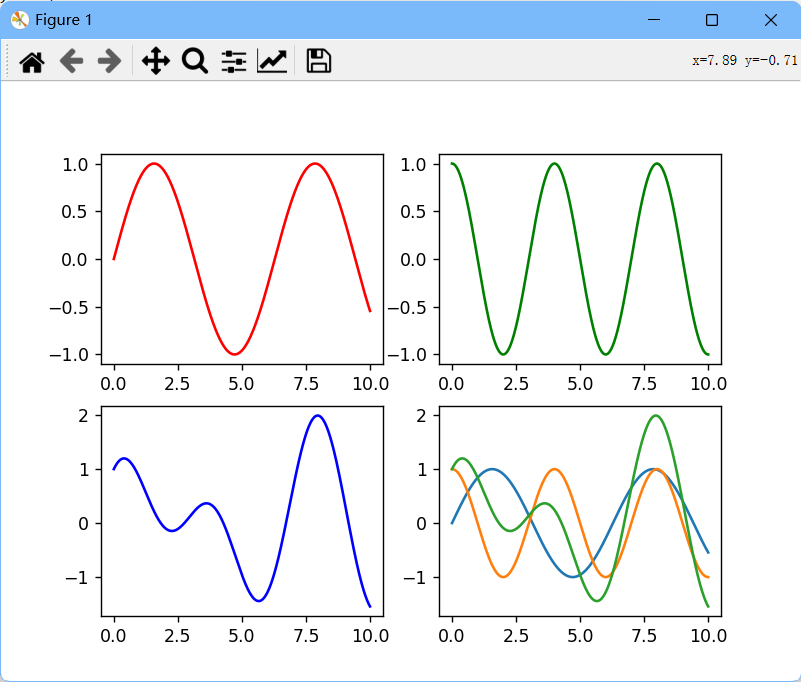
其实这个就是个很简单的东西,第四张可看可不看,主要是前三张图片,第一张是y1=sin(x)
第二张是y2=cos(x*pi/2),第三张是y3=y1+y2,那也就是说,怎么样才能从第三张图中把y1和y2给分离出来呢,学信号的同学这不就来精神了吗,那不就是,对吧,我直接一个傅里叶变换从时空域变到频率域,这不就很简单的能分开了嘛,so easy对吧,可是,这里,咱说的是支持向量机,也就是说,我们得用支持向量机的观点来给他把(x,y1)和(x,y2)这两个信号分开,怎么分开,我暂时就想了上面提到的变换到频率域去解决,当然,学信号的人会想到用滤波器或者其他方法,总之,有很多,但是具体怎么做呢,大家可以自己去试试,找找文献或者技术资料,来看看信号的分离或者是信号去噪这方面的,我只知道,方法很多。
二、线性可分支持向量机
QAQ,这个概念就要两页多,因为小学抄古诗抄怕了,我是真不喜欢抄书,,但是,抄吧,首先看一下他的目标是啥:通过求解和b,找到一个超平面,在保证这个超平面能偶正确将样本进行分类的同时,要使距离超平面最近的点到超平面的距离尽可能的大,说白了就是一个带约束条件的优化问题,其约束条件就是超平面可以把样本集合的点都给正确分类喽。
我们把距离超平面最近的点和超平面之间的距离记为
最优化问题就是:
我们可以对任一支持向量通过对超平面公式进行缩放,使得
然后到超平面的距离就是
,优化问题就能够写成
最大化,也就是最小化
,这里我用后者作为优化目标,就让你的计算可以方便了很多。
数学上是完全可以证明,支持向量机的超平面存在着唯一性,至少有两个支持向量,而且超平面的位置仅由这些支持向量决定。
再感知机的模型中,优化的目标很明确:
在满足模型能够正确分类的约束条件下,使得样本集合中所有点到分割超平面的距离最小,这样的超平面可能会有无数个。
然后,怎么求上面给出的最优化问题嘞?可以用拉格朗日乘子法来求解:
表示拉格朗日乘子,让lag函数对omega和b求偏导为零,然后计算就可以啦,详细的我就不写了,大家可以自己推一推,我也在纸上推一推,就不写latex了,嘿嘿。
相关文章:
Python机器学习:支持向量机
这是我读本科的时候第一个接触到的机器学习算法,但也是第一个听完就忘的。。。 他的基本思想很简单:想办法把一个样本集划成两个部分:对于空间中的样本点集合,我们找到一个超平面把这个样本点集合给分成两个部分,其中…...
矩阵和线性代数的应用
矩阵和线性代数是数学中重要的概念,它们被广泛应用于物理、工程、计算机科学、经济学等众多领域。本文将讨论矩阵和线性代数的一些基本概念以及它们在实际应用中的重要性和影响。 一、矩阵和线性代数的基本概念 矩阵是由数字组成的矩形数组。它可以表示线性方程组…...
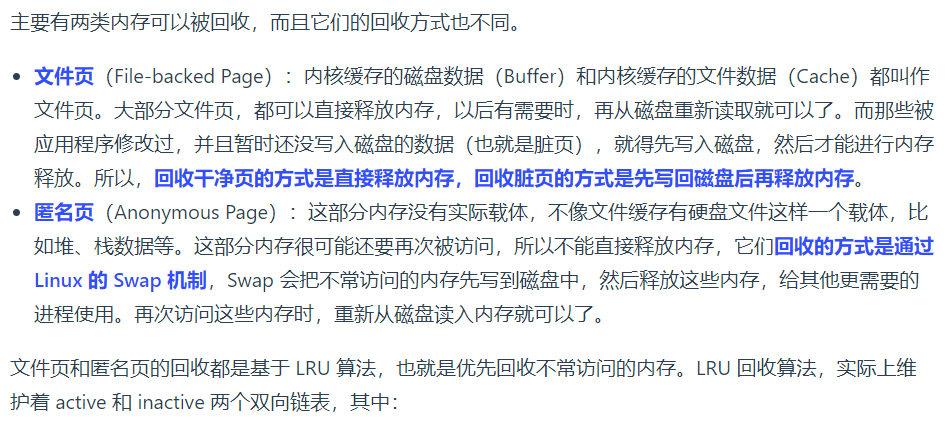
六:内存回收
内存回收: 应用程序通过 malloc 函数申请内存的时候,实际上申请的是虚拟内存,此时并不会分配物理内存。 当应用程序读写了这块虚拟内存,CPU 就会去访问这个虚拟内存, 这时会发现这个虚拟内存没有映射到物理内存&…...

【cpolar 内网穿透】Openwrt 软路由实现内网穿透
cpolar 是一种安全的内网穿透云服务,它将内网下的本地服务器通过安全隧道暴露至公网。使得公网用户可以正常访问内网服务。 文章目录 前言一、上传 cpolar 安装包二、配置cpolar环境变量三、安装并配置 cpolar 服务3.1 安装 cpolar3.2 启动 cpolar3.3 进行其他配置 …...

Android 10.0 Camera2 拍照功能默认选前摄像头
1.概述 在10.0的系统产品开发中,对于app调用系统api来打开摄像头拍照的功能也是常有的功能,而拍照一般是默认打开后置摄像头拍照的,由于 客户的产品特殊要求,需要打开前置摄像头拍照功能,所以需要了解拍照功能的流程,然后修改默认前置摄像头打开拍照功能就可以了 app调…...
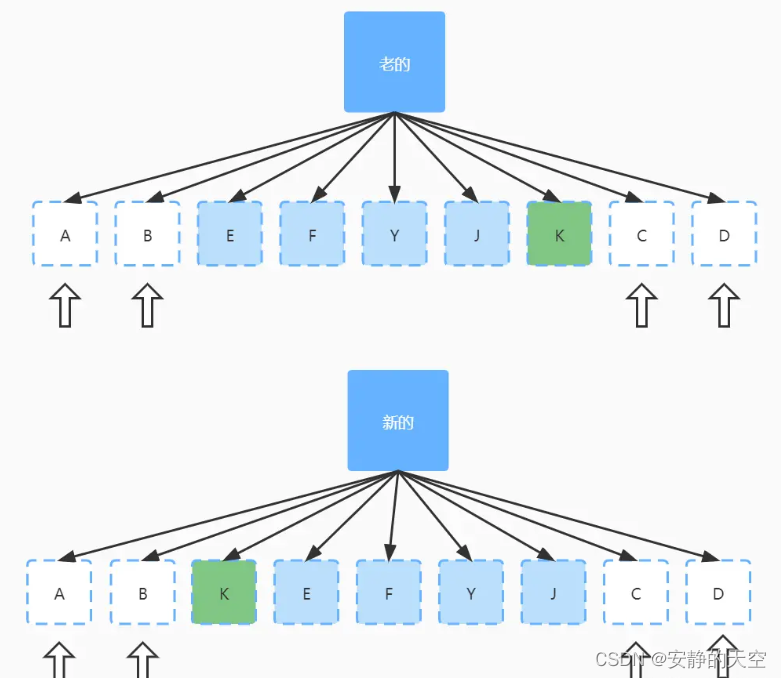
vue-vue2和vue3的diff算法
核心要点 数据变化时,vue如何更新节点虚拟DOM 和 真实DOM 的区别vue2 diff 算法vue3 diff 算法 一、 数据变化时,vue如何更新节点 首先渲染真实DOM的开销是很大,比如有时候我们修改了某个数据且修改的数据量很大时,此时会频繁的…...

一文解读基于PaddleSeg的钢筋长度超限监控方案
项目背景 钢铁厂生产钢筋的过程中会存在部分钢筋长度超限的问题,如果不进行处理,容易造成机械臂损伤。因此,需要通过质检流程,筛选出存在长度超限问题的钢筋批次,并进行预警。传统的处理方式是人工核查,该方…...
NumPy 数组学习手册:1~5
原文:Learning NumPy Array 协议:CC BY-NC-SA 4.0 译者:飞龙 一、NumPy 入门 让我们开始吧。 我们将在不同的操作系统上安装 NumPy 和相关软件,并查看一些使用 NumPy 的简单代码。 正如“序言”所述,SciPy 与 NumPy 密…...

【C++11】晦涩难懂语法系列:可变参数模板
目录 可变参数模板 1.1 概念 1.2 可变参数模板定义 1.3 参数包的展开方式 1.3.1 递归展开参数包 1.3.2 逗号表达式展开参数包 1.4 STL的emplace系列函数 可变参数模板 1.1 概念 在C语言阶段,我们已经接触过可变参数,比如scand、printf等等 这里…...
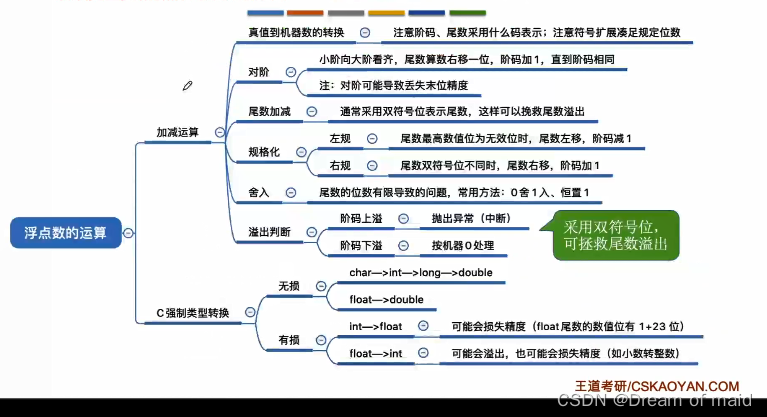
计算机组成原理第二章——数据的表示与运算(下)
提示:时光清浅处 一步一安然 文章目录 前言2.3.1 浮点数的表示2.3.2 IEEE7542.2.3 浮点数的运算 前言 本节主要讲三个问题,浮点数的表示,IEEE 754标准,浮点数的加减运算 2.3.1 浮点数的表示 浮点数的作用和基本原理 定点数可表…...
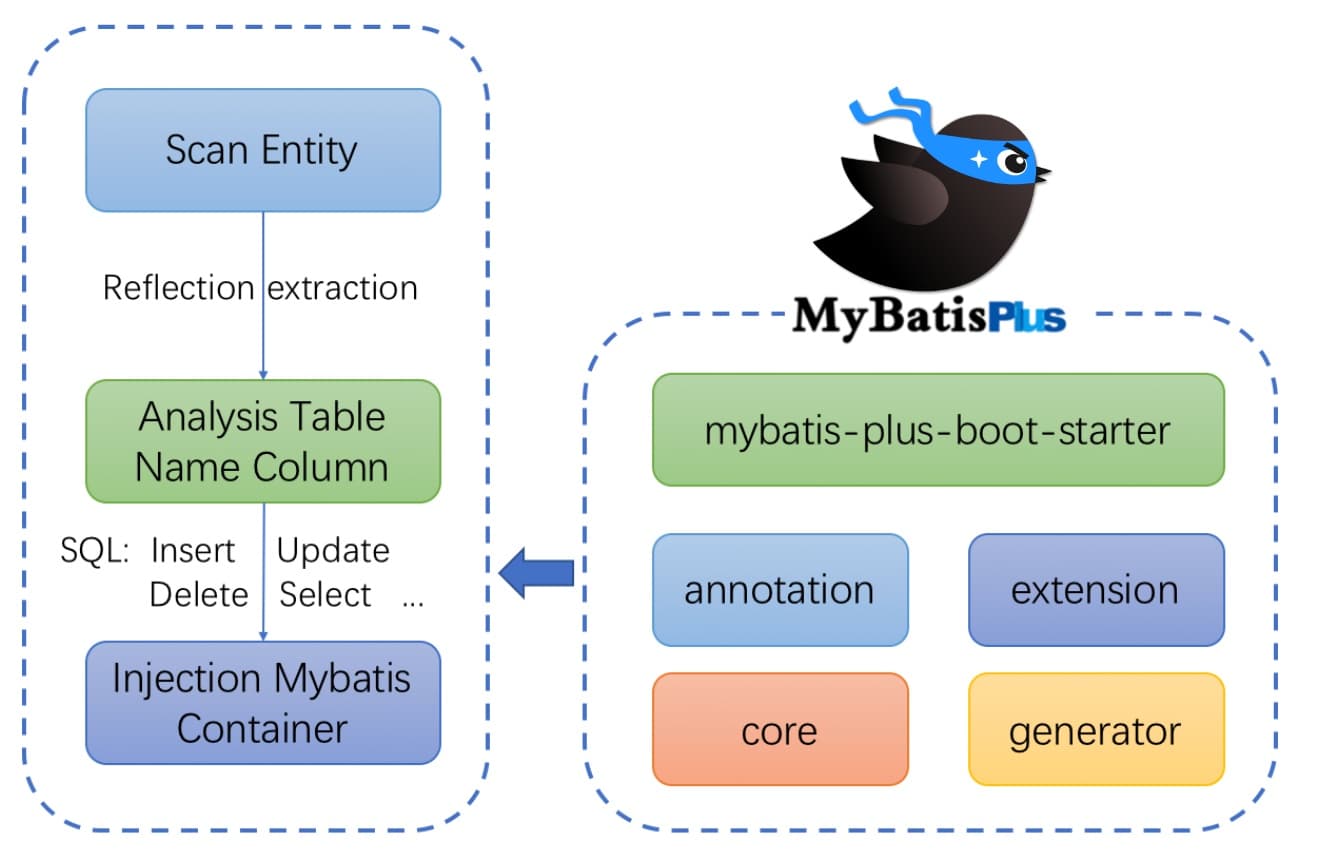
1.mybatis-plus入门及使用
1.什么是MybatisPlus MyBatis-Plus 官网 为什么要学MybatisPlus? MybatisPlus可以节省大量时间,所有的CRUD代码都可以自动化完成MyBatis-Plus是一个MyBatis的增强工具,在 MyBatis 的基础上只做增强不做改变,为简化开发、提高效…...

JavaWeb开发 —— 前端工程化
目录 一、前后端分离开发 二、YApi 三、前端工程化 1. 环境准备:vue-cli 2. Vue项目创建 四、Vue项目开发流程 一、前后端分离开发 ① 最早的前端开发就是实现页面,顶多再写写JS让页面可以有交互的特效。属于前后端未分离的时代。 早期前后端混合开…...

listener监听器框架
监听器是Web开发中常用的一种组件,用于监听某些事件并根据事件触发相应的处理逻辑。在Spring Boot中使用监听器可以方便地实现对程序中各种事件的监听,比如启动事件、关闭事件等。 首先需要定义一个监听器,通常需要实现ApplicationListener接…...

tp5实现导入excel表到数据库
hello,大家好,好长时间没有更新文章了。最近一直在忙着做项目。所以断更了。 那么好,各位老铁是否想要实现导入导出的功能 请关注我,解密如何实现导入导出, 那么今天先来讲一下用thinkphp5.0 如何实现Excel表格导入数据…...

Python基础-04 字符串
字符串的表示方式 在Python中,可以使用一对单引号/双引号或者一对三个双引号/一对三个单引号表示字符串 a hello b "hello" c hello d """hello""" # 如果字符串里面还有双引号,外面就可以使用单引号 # 反之一样 # 如果字符串里…...

VVC之编码结构
VVC之编码结构(新一代通用视频编码的读书笔记) 缩写概述EncAppmain函数解读 缩写 缩写含义CVSCoded Video Sequence, 编码视频序列IRAPIntra Random Access Point, 帧内随机接入点GDRGradual Decoding Refresh, 逐渐解码刷新AUAccess Unit, 访问单元PUP…...

FPGA基于SFP光口实现10G万兆网UDP通信 10G Ethernet Subsystem替代网络PHY芯片 提供工程源码和技术支持
目录 1、前言2、我这里已有的UDP方案3、详细设计方案4、vivado工程详解5、上板调试验证并演示6、福利:工程代码的获取 1、前言 目前网上的fpga实现udp基本生态如下: 1:verilog编写的udp收发器,但不带ping功能,这样的代…...
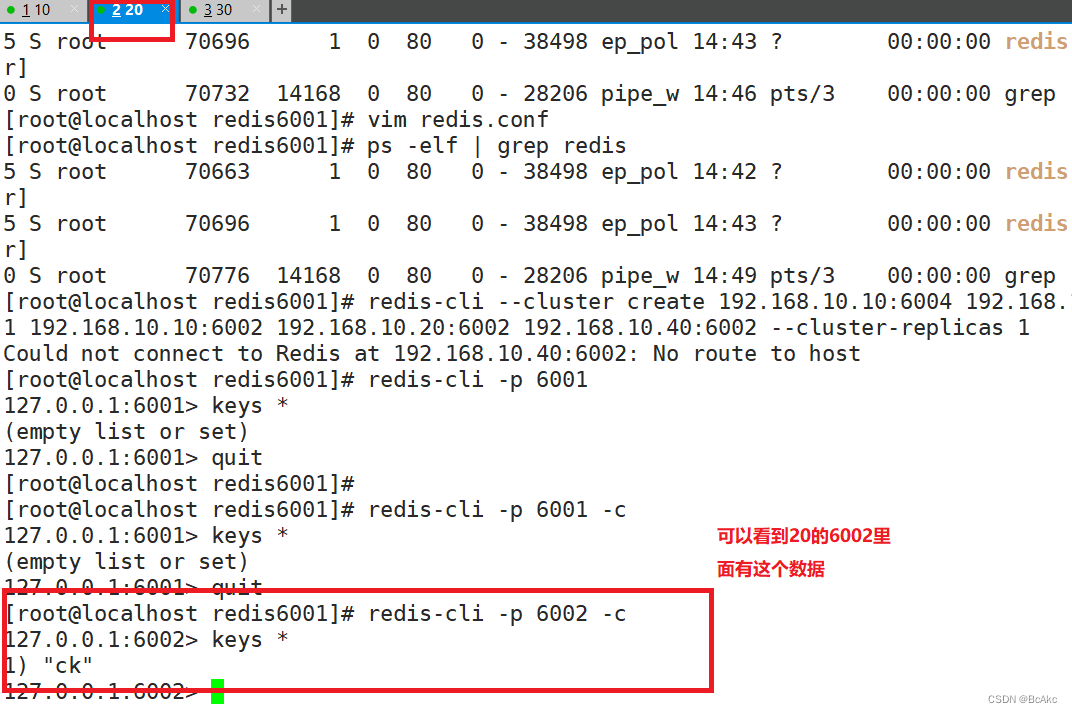
Linux Redis主从复制 | 哨兵监控模式 | 集群搭建 | 超详细
Linux Redis主从复制 | 哨兵监控模式 | 集群搭建 | 超详细 一 Redis的主从复制二 主从复制的作用三 主从复制的流程四 主从复制实验4.1 环境部署4.2 安装Redis(主从服务器)4.3 修改Master节点Redis配置文件 (192.168.163.100)4.4 修改Slave节点Redis配置…...

整柜海运到美国的规格和收费标准是什么
整柜海运是指将所有货物安装在一个整箱内,由发货人和收货人共同操作,而目的港的收货人一般只有一个,方便操作。整柜海运到美国的主要流程有以下几个步骤:订舱、装柜、报关、海运、清关、提柜和送货。实际上,国际物流出…...
Session和Cookie区别介绍+面试题
Session 会话: 对应的英文单词:session用户打开浏览器,进行一系列操作,然后关闭浏览器。整个过程叫做一次会话一个会话包含多次请求 session机制属于B/S结构的一部分,主要的作用就是为了保存会话状态。(用户登录成功后…...

科技中介如何减少重复建设成本,提升服务专业性?
观点作者:科易网-国家科技成果转化(厦门)示范基地 一、现状概述:科技中介服务的成效与短板 在创新驱动发展战略深入实施的时代背景下,科技中介机构作为连接科技创新与产业发展的关键桥梁,其重要性日益凸显。…...
)
[通俗易懂]从“生产者-消费者”模型秒懂Java泛型PECS原则(别再死记硬背了)
1. 从超市购物理解PECS原则 想象你正在超市采购水果。水果区有各种水果篮:有的专放苹果,有的专放香蕉,还有个"混合水果区"放各种水果。这时候你会发现两个有趣的现象: 从水果区取水果:你可以从任何水果篮里安…...

别再只用人体红外了!聊聊24.125GHz微波模块在智能家居中的另类玩法与局限
24.125GHz微波传感模块的智能家居创新应用与工程实践 在智能家居领域,人体感应技术早已从简单的红外探测走向多传感器融合时代。当大多数开发者还在依赖传统PIR红外传感器时,一种成本仅20元左右的24.125GHz微波模块正在小众硬件圈引发讨论。这种原本用于…...

K-Means聚类选K避坑指南:当肘部法则“失灵”,轮廓系数如何救场?
K-Means聚类选K避坑指南:当肘部法则"失灵",轮廓系数如何救场? 在数据科学实践中,K-Means算法因其简洁高效而广受欢迎,但确定最佳聚类数K却常让从业者陷入困境。当面对高维、噪声多或分布不平衡的真实业务数据…...

嵌入式开发实战:SPI、UART、I2C三大硬件接口通信协议详解与CircuitPython应用
1. 项目概述:为什么硬件接口是嵌入式开发的基石如果你玩过单片机或者树莓派,肯定遇到过这样的场景:手里有一块炫酷的LED灯带、一个GPS模块或者一个环境传感器,想让它和你的主控板“说上话”,结果发现连线复杂、代码难调…...

粉笔事业单位适合备考资格复审后面试吗?从材料确认、题型训练到岗位表达的评测
更新日期:2026年5月 很多事业单位考生在进入资格复审后,会搜索“粉笔事业单位怎么样”“粉笔事业单位面试适合资格复审后准备吗”“事业单位资格复审后怎么准备面试”。这些问题背后,真正关心的是:资格复审通过后距离面试通常不远…...

永强数据恢复硬盘设备加密数据专业解锁恢复服务
在当今数字化时代,数据的重要性不言而喻。无论是个人用户存储的珍贵照片、视频,还是企业存储的关键商业数据,一旦丢失,都可能带来巨大的损失。而硬盘设备加密数据的丢失或无法解锁,更是让人头疼不已。北京永强数据恢复…...

JDK 17文本块实战:告别繁琐拼接,拥抱多行字符串新写法
1. 为什么我们需要文本块? 如果你写过Java代码,肯定遇到过这样的场景:需要处理多行字符串,比如HTML模板、SQL语句或者JSON数据。在JDK 17之前,我们只能通过字符串拼接的方式来实现,代码看起来就像是一团乱麻…...

Qt实战:构建跨平台低功耗蓝牙BLE应用开发框架
1. 为什么选择Qt开发跨平台BLE应用 如果你正在为智能家居设备或者可穿戴设备开发蓝牙通信功能,Qt绝对是一个值得认真考虑的选择。我做过不少BLE项目,从智能手环到智能门锁都用过Qt开发,最大的感受就是它真的能省去很多跨平台的麻烦。 Qt的蓝牙…...
RWKV:融合RNN与Transformer优势的高效语言模型架构解析与实践
1. 项目概述:一个“非Transformer”的现代语言模型 如果你最近在关注大语言模型(LLM)的开源生态,除了那些基于Transformer架构的“巨无霸”,可能还听说过一个名字有点特别的项目: RWKV 。这个由开发者Bli…...