QT+ OpenGL 变换
文章目录
- QT+ OpenGL
- 变换
- 向量的运算
- 矩阵
- 矩阵与向量相乘
- 代码实现
QT+ OpenGL
本篇完整工程见gitee:QTOpenGL 对应点的tag,由turbolove提供技术支持,您可以关注博主或者私信博主。
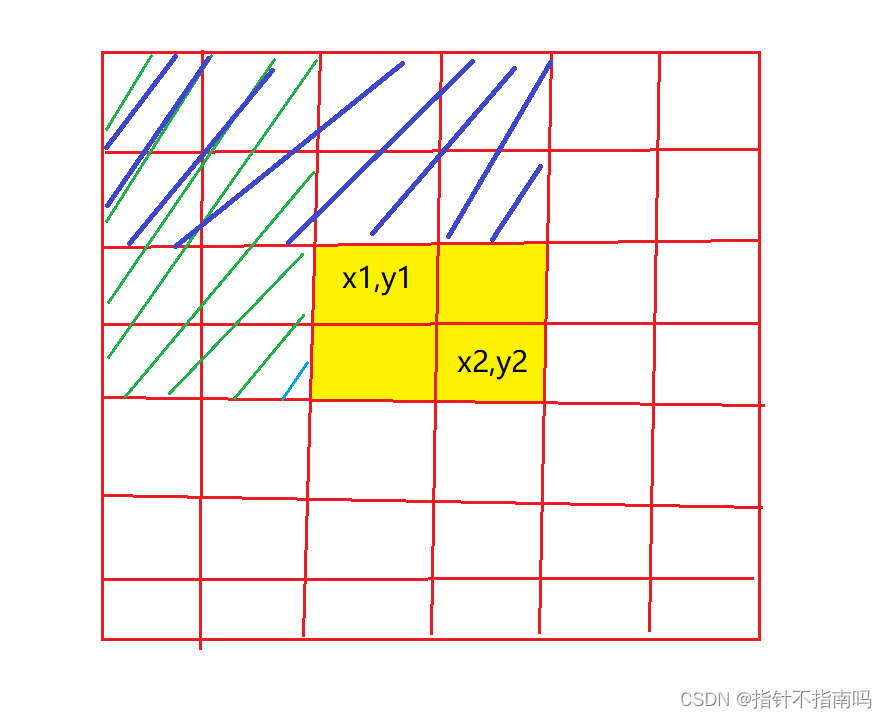
变换
我们需要改变物体的位置
现有解决办法(每一帧,改变顶点位置(所有顶点))
每个顶点使用向量表示,使用矩阵表示对应顶点的操作。
向量的运算
向量是有方向和大小的量
a⃗=(xyz)\vec{a} = \left(\begin{matrix} x \\ y \\z \end{matrix}\right) a=xyz
向量与标量运算
标量(Scalar)只是一个数字(或者说是仅有一个分量的向量)。当把一个向量加/减/乘/除一个标量,我们可以简单的把向量的每个分量分别进行该运算。对于加法来说会像这样:
(123)+x=(1+x2+x3+x)\left(\begin{matrix}1 \\ 2 \\3 \end{matrix}\right) + x = \left(\begin{matrix}1+x \\ 2+x \\3+x \end{matrix}\right) 123+x=1+x2+x3+x
其中的+可以是+,-,·或÷,其中·是乘号。注意-和÷运算时不能颠倒(标量-/÷向量),因为颠倒的运算是没有定义的。
向量取反
−a⃗=−(xyz)=(−x−y−z)-\vec{a} = -\left(\begin{matrix}x \\ y \\z \end{matrix}\right)= \left(\begin{matrix}-x \\ -y \\-z \end{matrix}\right) −a=−xyz=−x−y−z
向量加减
a⃗=(123),b⃗=(123),a⃗+b⃗=(1+12+23+3)=(246)\vec{a} = \left(\begin{matrix}1 \\ 2 \\3 \end{matrix}\right),\vec{b} = \left(\begin{matrix}1 \\ 2 \\3 \end{matrix}\right),\vec{a}+\vec{b} = \left(\begin{matrix}1 + 1\\ 2 + 2 \\3 +3 \end{matrix}\right) = \left(\begin{matrix}2 \\ 4 \\ 6 \end{matrix}\right) a=123,b=123,a+b=1+12+23+3=246
长度
∣v⃗∣=x2+y2(1)|\vec{v}|=\sqrt{x^2+y^2} \tag{1} ∣v∣=x2+y2(1)
向量相乘
- 点乘法: a⃗⋅b⃗\vec{a}\cdot\vec{b}a⋅b
a⃗⋅b⃗=∣a⃗∣⋅∣b⃗∣⋅cosθ\vec{a} \cdot \vec{b} =|\vec{a}|\cdot|\vec{b}|\cdot cos\theta a⋅b=∣a∣⋅∣b∣⋅cosθ
- 叉乘法 : a⃗×b⃗\vec{a}\times\vec{b}a×b
公式如下:
a⃗×b⃗=(AxAyAz)×(BxByBz)=(Ay⋅Bz−Az⋅ByAz⋅Bx−Ax⋅BzAx⋅By−Ay⋅Bx)\vec{a}\times\vec{b} =\left( \begin{matrix} \textcolor{#FF0000}{Ax} \\ \textcolor{#00FF00}{Ay} \\ \textcolor{#0000FF}{Az} \end{matrix}\right) \times \left(\begin{matrix} \textcolor{#FF0000}{Bx} \\ \textcolor{#00FF00}{By} \\ \textcolor{#0000FF}{Bz}\end{matrix}\right) = \left(\begin{matrix}\textcolor{#00FF00}{Ay} \cdot \textcolor{#0000FF}{Bz} - \textcolor{#0000FF}{Az} \cdot \textcolor{#00FF00}{By} \\ \textcolor{#0000FF}{Az} \cdot \textcolor{#FF0000}{Bx} - \textcolor{#FF0000}{Ax} \cdot \textcolor{#0000FF}{Bz} \\ \textcolor{#FF0000}{Ax} \cdot \textcolor{#00FF00}{By} - \textcolor{#00FF00}{Ay} \cdot \textcolor{#FF0000}{Bx }\end{matrix}\right) a×b=AxAyAz×BxByBz=Ay⋅Bz−Az⋅ByAz⋅Bx−Ax⋅BzAx⋅By−Ay⋅Bx
矩阵
一个矩形的数字、符号或者表达式的数组。矩阵中的每一项叫做矩阵的元素
[011110101]\left[\begin{matrix} 0&1&1\\ 1&1&0\\ 1&0&1\\ \end{matrix}\right] 011110101
矩阵的加减
矩阵与标量之间的加减定义如下
[0111]+‾1=[0+‾11+‾11+‾11+‾1]\left[\begin{matrix} 0&1\\ 1&1\\ \end{matrix}\right] \underline+ 1 = \left[\begin{matrix} 0 \underline +1&1\underline + 1\\ 1\underline + 1&1 \underline + 1\\ \end{matrix}\right] [0111]+1=[0+11+11+11+1]
矩阵与矩阵之间的加减就是两个矩阵对应元素的加减运算
[0123]+‾[0123]=[0+‾01+‾12+‾23+‾3]加法=[0246]减法=[0000]\left[\begin{matrix} 0&1\\ 2&3\\ \end{matrix}\right] \underline+ \left[\begin{matrix} 0&1\\ 2&3\\ \end{matrix}\right] = \left[\begin{matrix} 0\underline+0&1\underline+1\\ 2\underline+2&3\underline+3\\ \end{matrix}\right] 加法= \left[\begin{matrix} 0&2\\ 4&6\\ \end{matrix}\right] 减法= \left[\begin{matrix} 0&0\\ 0&0\\ \end{matrix}\right] [0213]+[0213]=[0+02+21+13+3]加法=[0426]减法=[0000]
矩阵的数乘
和矩阵与标量的加减一样,矩阵与标量之间的乘法也是矩阵的每一个元素分别乘以该标量。
[0111]⋅2=[0⋅21⋅21⋅21⋅2]=[0222]\left[\begin{matrix} 0&1\\ 1&1\\ \end{matrix}\right] \cdot 2 = \left[\begin{matrix} 0 \cdot2&1\cdot 2\\ 1\cdot 2&1 \cdot 2\\ \end{matrix}\right]= \left[\begin{matrix} 0&2\\ 2&2\\ \end{matrix}\right] [0111]⋅2=[0⋅21⋅21⋅21⋅2]=[0222]
矩阵相乘
矩阵之间的乘法不见得有多复杂,但的确很难让人适应。矩阵乘法基本上意味着遵照规定好的法则进行相乘。当然,相乘还有一些限制:
- 只有当左侧矩阵的列数与右侧矩阵的行数相等,两个矩阵才能相乘。
- 矩阵相乘不遵守交换律(Commutative),也就是说A⋅B≠B⋅AA \cdot B \not= B \cdot AA⋅B=B⋅A
公式如下:
[1234]⋅[5678]=[1⋅5+2⋅71⋅6+2⋅83⋅5+4⋅73⋅6+4⋅8]=[19224350]\left[\begin{matrix} 1&2\\ 3&4\\ \end{matrix}\right] \cdot \left[\begin{matrix} 5&6\\ 7&8\\ \end{matrix}\right] = \left[\begin{matrix} 1 \cdot 5 + 2 \cdot 7 & 1 \cdot 6+ 2 \cdot 8\\ 3 \cdot 5 + 4 \cdot 7 & 3 \cdot 6+ 4 \cdot 8\\ \end{matrix}\right] = \left[\begin{matrix} 19&22\\ 43&50\\ \end{matrix}\right] [1324]⋅[5768]=[1⋅5+2⋅73⋅5+4⋅71⋅6+2⋅83⋅6+4⋅8]=[19432250]
矩阵与向量相乘
向量就是一个N×1N \times 1N×1的矩阵
单位矩阵就是一个除了对角线以为都是0的 N×NN \times NN×N的矩阵
[1000010000100001]⋅[1234]=[1⋅12⋅23⋅34⋅4]=[1234]\left[\begin{matrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left[\begin{matrix} 1\\ 2\\ 3\\ 4\\ \end{matrix}\right] = \left[\begin{matrix} 1 \cdot 1\\ 2 \cdot 2\\ 3 \cdot 3\\ 4 \cdot 4\\ \end{matrix}\right] = \left[\begin{matrix} 1\\ 2\\ 3\\ 4\\ \end{matrix}\right] 1000010000100001⋅1234=1⋅12⋅23⋅34⋅4=1234
缩放
OpenGL通常是在3D空间进行操作的,对于2D的情况我们可以把z轴缩放1倍,这样z轴的值就不变了。我们刚刚的缩放操作是不均匀(Non-uniform)缩放,因为每个轴的缩放因子(Scaling Factor)都不一样。如果每个轴的缩放因子都一样那么就叫均匀缩放(Uniform Scale)。
[S10000S20000S300001]⋅(xyz1)=(S1⋅xS2⋅yS3⋅z1)\left[\begin{matrix} S1&0&0&0\\ 0&S2&0&0\\ 0&0&S3&0\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left(\begin{matrix} x\\ y\\ z\\ 1\\ \end{matrix}\right) = \left(\begin{matrix} S1 \cdot x\\ S2 \cdot y\\ S3 \cdot z\\ 1\\ \end{matrix}\right) S10000S20000S300001⋅xyz1=S1⋅xS2⋅yS3⋅z1
位移
位移(Translation)是在原始向量的基础上加上另一个向量从而获得一个在不同位置的新向量的过程,从而在位移向量基础上移动了原始向量。我们已经讨论了向量加法,所以这应该不会太陌生。
[100Tx010Ty001Tz0001]⋅(xyz1)=(x+Txy+Tyz+Tz1)\left[\begin{matrix} 1&0&0&Tx\\ 0&1&0&Ty\\ 0&0&1&Tz\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left(\begin{matrix} x\\ y\\ z\\ 1\\ \end{matrix}\right) = \left(\begin{matrix} x + Tx\\ y + Ty\\ z + Tz\\ 1\\ \end{matrix}\right) 100001000010TxTyTz1⋅xyz1=x+Txy+Tyz+Tz1
齐次坐标(Homogeneous Coordinates)
向量的w分量也叫齐次坐标。想要从齐次向量得到3D向量,我们可以把x、y和z坐标分别除以w坐标。我们通常不会注意这个问题,因为w分量通常是1.0。使用齐次坐标有几点好处:它允许我们在3D向量上进行位移(如果没有w分量我们是不能位移向量的),而且下一章我们会用w值创建3D视觉效果。
如果一个向量的齐次坐标是0,这个坐标就是方向向量(Direction Vector),因为w坐标是0,这个向量就不能位移(译注:这也就是我们说的不能位移一个方向)。
旋转
大多数旋转函数需要用弧度制的角:
- 弧度转角度:角度=弧度×(180.0/π)角度 = 弧度 \times (180.0 / \pi)角度=弧度×(180.0/π)
- 角度转弧度:弧度=角度×(π/180.0)弧度 = 角度 \times (\pi / 180.0)弧度=角度×(π/180.0)
沿着x轴旋转:
[10000cosθ−sinθ00sinθcosθ00001]⋅(xyz1)=(xcosθ⋅y−sinθ⋅zsinθ⋅y+cosθ⋅z1)\left[\begin{matrix} 1&0&0&0\\ 0&cos\theta&-sin\theta&0\\ 0&sin\theta&cos\theta&0\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left(\begin{matrix} x\\ y\\ z\\ 1\\ \end{matrix}\right) = \left(\begin{matrix} x\\ cos\theta\cdot y - sin\theta\cdot z\\ sin\theta\cdot y + cos\theta\cdot z\\ 1\\ \end{matrix}\right) 10000cosθsinθ00−sinθcosθ00001⋅xyz1=xcosθ⋅y−sinθ⋅zsinθ⋅y+cosθ⋅z1
沿着y轴旋转:
[cosθ0sinθ00100−sinθ0cosθ00001]⋅(xyz1)=(cosθ⋅x+sinθ⋅zy−sinθ⋅x+cosθ⋅z1)\left[\begin{matrix} cos\theta&0&sin\theta&0\\ 0&1&0&0\\ -sin\theta&0&cos\theta&0\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left(\begin{matrix} x\\ y\\ z\\ 1\\ \end{matrix}\right) = \left(\begin{matrix} cos\theta\cdot x+ sin\theta\cdot z\\ y \\ -sin\theta\cdot x + cos\theta\cdot z\\ 1\\ \end{matrix}\right) cosθ0−sinθ00100sinθ0cosθ00001⋅xyz1=cosθ⋅x+sinθ⋅zy−sinθ⋅x+cosθ⋅z1
沿着z轴旋转:
[cosθ−sinθ00sinθcosθ0000100001]⋅(xyz1)=(cosθ⋅x−sinθ⋅ysinθ⋅x+cosθ⋅yz1)\left[\begin{matrix} cos\theta&-sin\theta&0&0\\ sin\theta&cos\theta&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left(\begin{matrix} x\\ y\\ z\\ 1\\ \end{matrix}\right) = \left(\begin{matrix} cos\theta\cdot x - sin\theta\cdot y\\ sin\theta\cdot x + cos\theta\cdot y \\ z \\ 1\\ \end{matrix}\right) cosθsinθ00−sinθcosθ0000100001⋅xyz1=cosθ⋅x−sinθ⋅ysinθ⋅x+cosθ⋅yz1
矩阵的组合
使用矩阵进行变换的真正力量在于,根据矩阵之间的乘法,我们可以把多个变换组合到一个矩阵中。让我们看看我们是否能生成一个变换矩阵,让它组合多个变换。假设我们有一个顶点(x, y, z),我们希望将其缩放2倍,然后位移(1, 2, 3)个单位。我们需要一个位移和缩放矩阵来完成这些变换。结果的变换矩阵看起来像这样:
[1001010200130001]⋅[2000020000200001]=[2001020200230001]\left[\begin{matrix} 1&0&0&1\\ 0&1&0&2\\ 0&0&1&3\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left[\begin{matrix} 2&0&0&0\\ 0&2&0&0\\ 0&0&2&0\\ 0&0&0&1\\ \end{matrix}\right] = \left[\begin{matrix} 2&0&0&1\\ 0&2&0&2\\ 0&0&2&3\\ 0&0&0&1\\ \end{matrix}\right] 1000010000101231⋅2000020000200001=2000020000201231
用最终的变换矩阵左乘我们的向量会得到以下结果:
[2001020200230001]⋅(xyz1)=(2x+12y+22z+31)\left[\begin{matrix} 2&0&0&1\\ 0&2&0&2\\ 0&0&2&3\\ 0&0&0&1\\ \end{matrix}\right] \cdot \left(\begin{matrix} x\\ y\\ z\\ 1\\ \end{matrix}\right) = \left(\begin{matrix} 2x + 1\\ 2y + 2\\ 2z + 3 \\ 1\\ \end{matrix}\right) 2000020000201231⋅xyz1=2x+12y+22z+31
代码实现
#version 330 core
layout (location = 0) in vec3 aPos;
layout (location = 1) in vec3 aColor;
layout (location = 1) in vec2 aTexCord;
out vec3 ourColor; // 向片段着色器输出一个颜色
out vec2 texCord; // 向片段着色器输出一个颜色
uniform mat4 RotationMatrix;
void main()
{gl_Position = RotationMatrix * vec4(aPos, 1.0);ourColor = aColor; // 将ourColor设置为我们从顶点数据那里得到的输入颜色texCord = aTexCord;
}
QMatrix4x4 matrix;
unsigned int time = QTime::currentTime().msec();
matrix.translate(3,3);
matrix.rotate(time, 0.0f, 0.0f, 1.0f);
...
shader_program_.setUniformValue("RotationMatrix", matrix);
相关文章:

QT+ OpenGL 变换
文章目录QT OpenGL变换向量的运算矩阵矩阵与向量相乘代码实现QT OpenGL 本篇完整工程见gitee:QTOpenGL 对应点的tag,由turbolove提供技术支持,您可以关注博主或者私信博主。 变换 我们需要改变物体的位置 现有解决办法(每一帧,…...
【算法】前缀和
作者:指针不指南吗 专栏:算法篇 🐾要学会在纸上打草稿,这个很重要🐾 文章目录1.什么是前缀和?2.怎么求前缀和?3.前缀和有什么用?4.进阶二维:矩阵和前缀和 主打一个记公式 1.什么是前…...
《Redis实战篇》七、Redis消息队列
7.1 Redis消息队列-认识消息队列 什么是消息队列:字面意思就是存放消息的队列。最简单的消息队列模型包括3个角色: 消息队列:存储和管理消息,也被称为消息代理(Message Broker)生产者:发送消息…...

android组件化
学习流程:1.开源最佳实践:Android平台页面路由框架ARouter-阿里云开发者社区 (aliyun.com)2.中文ARouter使用API:https://github.com/alibaba/ARouter/blob/master/README_CN.md3.看当前文档后面的代码4.这是通俗易懂的文章:https…...
)
华为OD机试真题Python实现【特异性双端队列】真题+解题思路+代码(20222023)
🔥系列专栏 华为OD机试(Python)真题目录汇总华为OD机试(JAVA)真题目录汇总华为OD机试(C++)真题目录汇总华为OD机试(JavaScript)真题目录汇总文章目录 🔥系列专栏题目输入输出示例一输入输出解题思路核心知识点Python 代码实现代码运行结果版权说明<...

24.架构能力
文章目录24. 架构能力24.1 Competence of Individuals: Duties, Skills, and Knowledge of Architects 个人能力:架构师的职责、技能和知识24.2 Competence of a Software Architecture Organization 软件架构组织的能力24.3 Summary 小结24.4 For Further Reading …...
前端原生 CSS 跑马灯效果,无限轮播(横竖版本,带渐变遮罩,简单实用)
一、横版跑马灯 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta http-equiv"X-UA-Compatible" content"IEedge"><meta name"viewport" content"widthdevice-wid…...
4.8 注解与自定义注解
文章目录1.概述2.注解的分类2.1 JDK注解2.2 元注解2.2.1 Target ElementType…2.2.2 Retention RetentionPolicy…3 自定义注解1.概述 在注解刚出现时,曾受到过好多程序员的鄙夷,觉得这就是多此一举的操作; 但随着时间的推移,越…...

webpack 的热更新是如何做到的?原理是什么?
Hot Module Replacement,简称 HMR,在不需要刷新整个页面的同时更新模块,能够提升开发的效率和体验。热更新时只会局部刷新页面上发生了变化的模块,同时可以保留当前页面的状态,比如复选框的选中状态等。 在 webpack 中…...
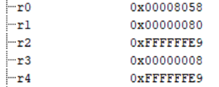
嵌入式ARM设计编程(一) 简单数据搬移
文章和代码已归档至【Github仓库:hardware-tutorial】,需要的朋友们自取。或者公众号【AIShareLab】回复 嵌入式 也可获取。 一、实验目的 熟悉实验开发环境,掌握简单ARM汇编指令的使用方法。 二、实验环境 硬件:PC机 软件&am…...
【Selenium】十分钟手把手带你学会WebDriver API
目录 1、定位元素【8种】 2、操作测试对象 3、添加等待 4、弹窗类型 5、浏览器的操作 6、键盘事件 7、选择框 8、上传文件 1、定位元素【8种】 元素定位是自动化测试的核心,想要去操作一个对象,第一步就是需要我们先去识别这个对象。每个对象就会…...
3DMAX高级弯曲插件使用教程
3dMax高级弯曲插件是对3dmax原生“弯曲(Bend)”修改器的一个增强,给用户更多控制弯曲修改器的参数设置,它让用户输入宽度,插件脚本将移动中心以获得正确的宽度。 主要特性: - 使用智能捕捉捕捉到自定义网格…...

前端面试题之性能优化大杂烩
主要内容为下面几大类:移动端、图片、JavaScript、css、html、页面内容、服务器、cookie。 移动端性能优化: 保持单个文件小于25KB 移动网站页面要求下载资源,如果文件过大,会大大减慢页面加载速度。 打包内容为分段multipart文…...

SpringBoot+Vue实现养老智慧服务平台
文末获取源码 开发语言:Java 框架:springboot JDK版本:JDK1.8 服务器:tomcat7 数据库:mysql 5.7/8.0 数据库工具:Navicat11 开发软件:eclipse/myeclipse/idea Maven包:Maven3.3.9 浏…...

tigervnc2023
sudo apt-get install tigervnc-standalone-server 配置用户 /etc/tigervnc/vncserver.users :1user1 :2user2 :3user3 全局配置 /etc/tigervnc/vncserver-config-defaults $localhost"no"; $geometry "1920x1200"; 分别进入user1 user2 user3 用户…...
智能三子棋(人机大战)—— 你会是最终赢家吗?万字讲解让你实现与自己对弈
魔王的介绍:😶🌫️一名双非本科大一小白。魔王的目标:🤯努力赶上周围卷王的脚步。魔王的主页:🔥🔥🔥大魔王.🔥🔥🔥 ❤️…...
【自制开发板】自制STM32F407开发板(含TFT 8080串口屏幕接口)
【2023 年 2 月 14 日】 许久没有更新,最近做了个小开发板玩了玩。更新一下吧,作为记录!! 主要是象试一下LVGL在STM32上的应用,所以开发板的大小都是基于屏幕大小来设计的。 分享出来,给大家一个板子结构…...

openvino yolov5/ssd 实时推流目标检测在html上显示
安装ffmepg并添加到环境变量中,流媒体使用m7s 运行效果 SSD:检测在10ms左右,yolov5在100ms左右 app.py #!/usr/local/bin/python3 # encodin: utf-8import subprocess import threading import time import cv2 import osfrom OpenVinoYoloV…...
基于FPGA的 SPI通信 设计(1)
引言 低速通信目前搞过 UART串口通信、IIC通信。其实 SPI 也算是中低速(有时也可以用作高速通信)串行通信的范畴,但是一直还没真正实现过,所以此系列就 SPI的协议以及FPGA设计作几篇博客记录。欢迎订阅关注~ SPI 标准协议 x1模式…...
为什么西门子、美的等企业这样进行架构升级,看看改造效果就知道了
在工业领域, 生产、测试、运行阶段都可能会产生大量带有时间戳的传感器数据,这都属于典型的时序数据。时序数据主要由各类型实时监测、检查与分析设备所采集或产生,涉及制造、电力、化工、工程作业等多个行业,具备写多读少、量非常…...

ARM架构计数器-定时器寄存器原理与应用
1. ARM架构中的计数器-定时器寄存器深度解析在ARM处理器架构中,计数器-定时器寄存器是实现精确时间控制和事件触发的核心组件。这些寄存器不仅为操作系统提供时间基准,还在虚拟化、安全扩展和实时系统中扮演关键角色。本文将深入剖析CNTHCTL和CNTHP_CTL等…...

OBS多平台直播终极指南:obs-multi-rtmp插件让你一键同步推流到各大平台
OBS多平台直播终极指南:obs-multi-rtmp插件让你一键同步推流到各大平台 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 还在为多平台直播的繁琐配置而烦恼吗?obs…...

Notflix高级技巧:5种高效搜索和流媒体传输方法
Notflix高级技巧:5种高效搜索和流媒体传输方法 【免费下载链接】notflix Notflix is a shell script to search and stream torrent. 项目地址: https://gitcode.com/gh_mirrors/no/notflix Notflix是一款强大的shell脚本工具,能够帮助用户快速搜…...
》进阶深化中篇:Spring核心 + 数据库进阶)
《Java面试85题图解版(二)》进阶深化中篇:Spring核心 + 数据库进阶
📘 《Java面试85题图解版(二)》进阶深化中篇:Spring核心 数据库进阶 阅读提示:这是“图解比喻一句话总结”面试题库第二篇的进阶深化中篇,覆盖Spring核心与Spring Boot(9题)和数据库…...

Let‘s Encrypt证书有效期缩短至90天后,如何实现自动续期
Let’s Encrypt证书有效期缩短至90天后,如何实现自动续期 打开网站突然发现浏览器地址栏一把红色小锁,提示"您的连接不是专用连接"——SSL证书过期了。这可能是站长最不想看到的画面之一:用户无法正常访问、搜索引擎排名下降、甚至…...

【日常小问】解决 Jenkins 部署 Spring Cloud 微服务到 Docker 容器启动失败的问题
一、问题出现在使用 Jenkins 进行 CI/CD 部署 Spring Cloud 微服务项目时,遇到了一个让人头疼的问题:所有通过 Jenkins 构建的 Docker 容器启动后立即退出,状态码为 Exited (1)。查看容器日志,报错信息如下:**********…...

MCP TypeScript SDK 服务说明文档
1. 服务概述 一句话简介:完整的MCP规范TypeScript实现,轻松构建MCP客户端和服务器,为LLM应用提供标准化的上下文管理能力。 服务名称:MCP TypeScript SDK版本号:Latest开发者/提供方:federated-alpha协议…...

眼动追踪技术:DINOv3与合成数据的优化方案
1. 眼动追踪技术概述与挑战眼动追踪技术通过捕捉和分析人眼的注视点位置,能够精确还原用户的视觉注意力分布。这项技术在多个领域展现出重要价值:在VR/AR设备中实现自然交互,在心理学研究中量化视觉认知过程,在用户体验测试中优化…...

【AI原生版本控制终极指南】:2026奇点大会Git for AI官方认证实践白皮书首次解禁
更多请点击: https://intelliparadigm.com 第一章:AI原生版本控制:2026奇点智能技术大会Git for AI最佳实践 在2026奇点智能技术大会上,Git for AI正式成为AI工程化基础设施的核心组件。它不再仅追踪文本变更,而是原生…...

系统设计:负载均衡器
原文:towardsdatascience.com/system-design-load-balancer-9a3582176f9b 简介 大型分布式应用每秒处理超过数千个请求。在某个时刻,处理单个机器上的请求变得不再可能。这就是为什么软件工程师关心水平扩展,即整个系统持续地组织在多个服务…...