【工具】使用VS Code调试Docker Container中的代码
目录
- 使用VS Code调试Docker Container中的Autoware.ai代码
- 第一种方法 -- 在VS Code中进行Debug
- Step1
- Step2
- Step3
- Step4
- c_cpp_properties.json
- launch.json
- settings.json
- task.json
- Step5
- Step6
- Step7
- 参考链接
- 第二种方法 -- cmake重新编译
- cmake
- 使用方法(简介)
- cmake常用目录结构
- build
- bin
- lib
- src
- 教程
- Autoware编译结构
- 查看Autoware的编译类型
- 修改CMakeList.txt文件
- 参考链接
- OpenPlanner项目独立的github链接
- colcon使用文档
- build Autoware from source
- How to check if program was compiled with debug symbols? [duplicate]
- VSCode debug cpp ROS node - compile package with debug mode
- C/C++: How do you set GDB debug flag (-g) with cmake?
使用VS Code调试Docker Container中的Autoware.ai代码
第一种方法 – 在VS Code中进行Debug
在用这个方法时踩到了一些坑,一度搞得我很无奈。后面解决的方法也有点莫名其妙。下面详细叙述下。
Step1
首先创建docker container,这里我是用命令行创建的。然后运行autoware提供的/docker/generic/下的run.sh,即会自动创建docker container并进入到container中。此时docker --version为Docker version 20.10.18, build b40c2f6.
更新vs code到最新版本,安装docker 插件
Step2
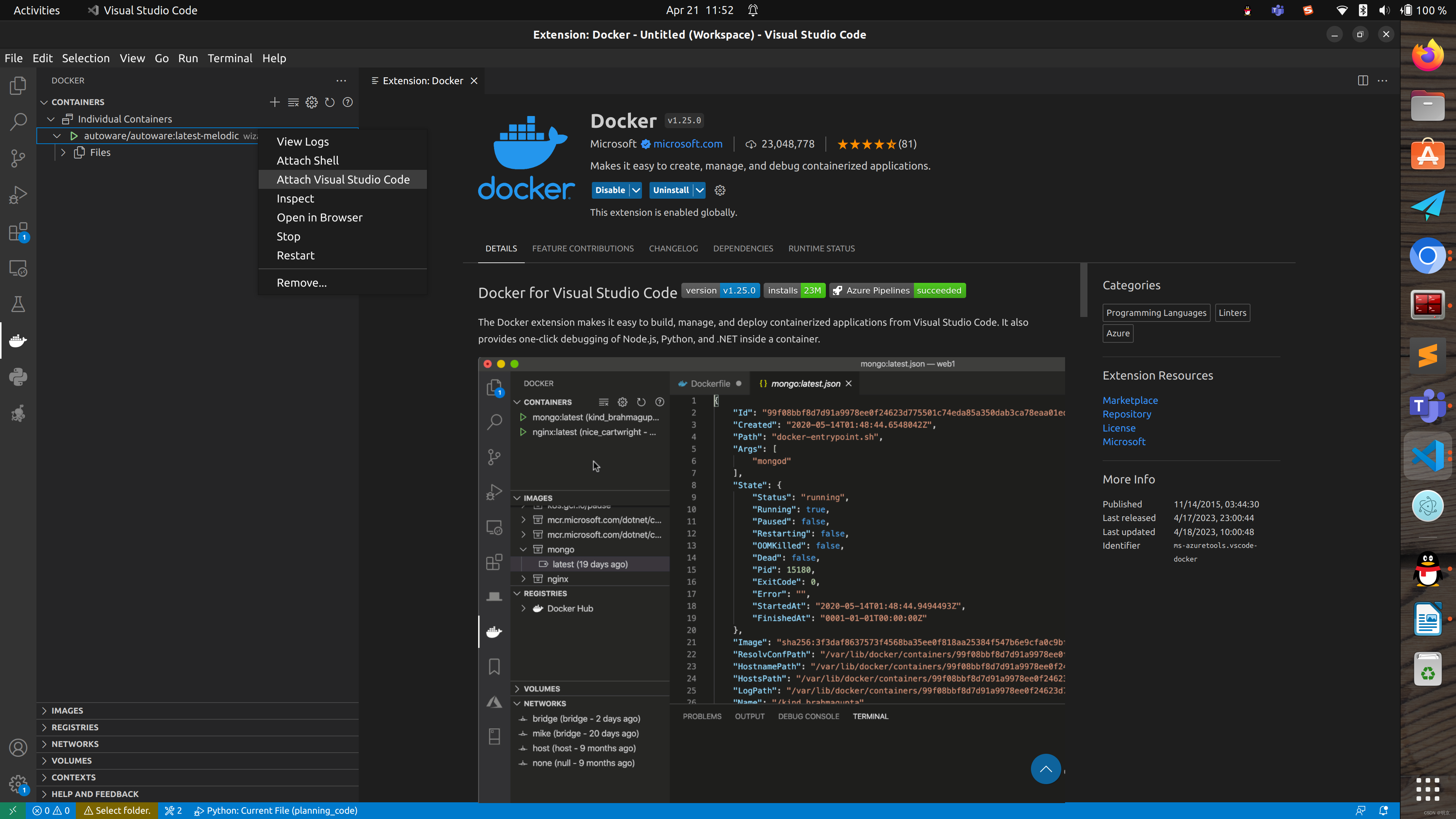
点击左侧任务栏的docker按钮, 可以看到显示所有的container,右击选择Attach Visual Studio Code
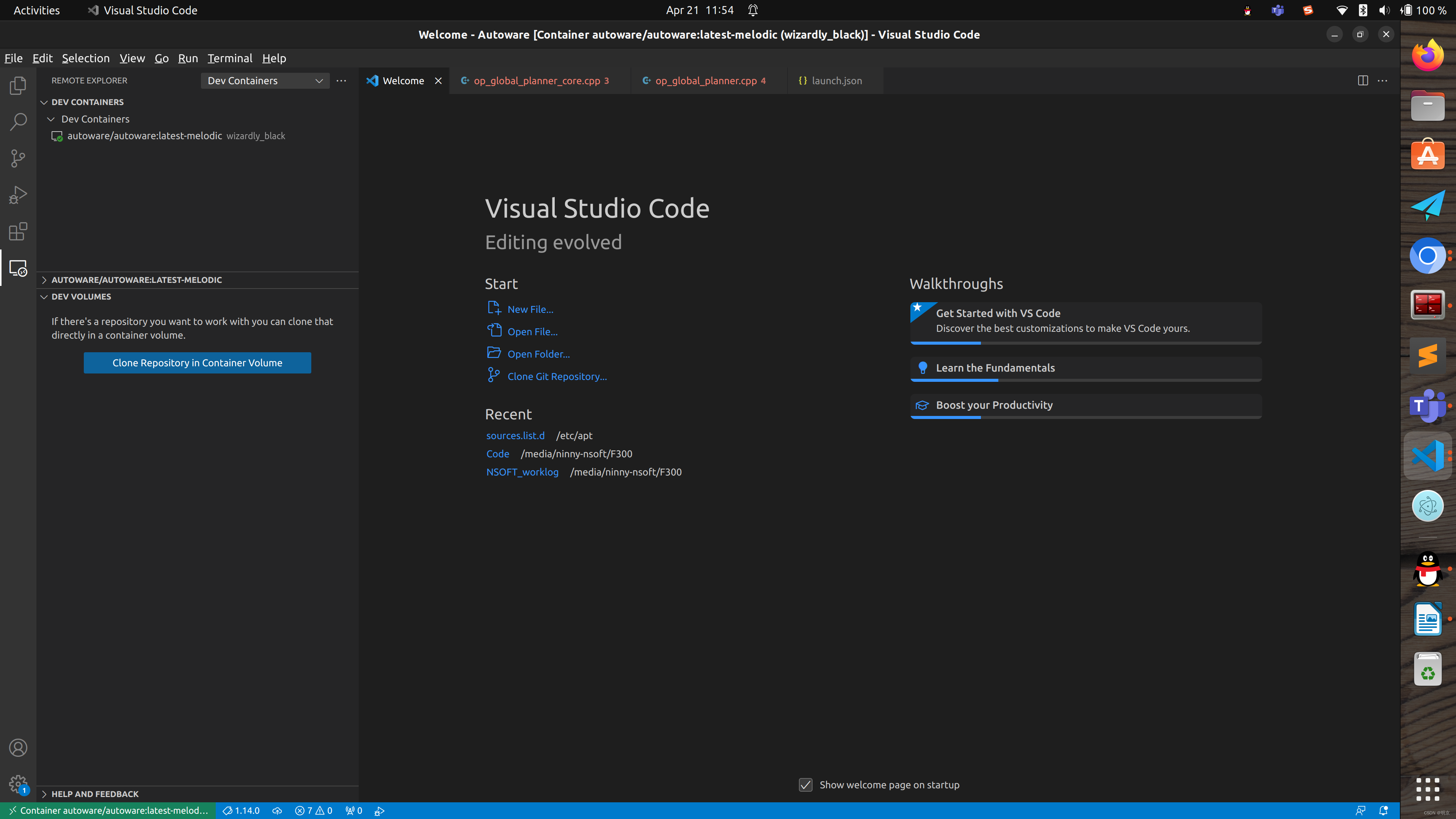
会弹出一个新的窗口,可以在左侧任务栏看到DEV CONTAINERS已经连接,如下图所示。
这里曾经遇到两个坑
第一个是在点击Attach Visual Studio Code后,VS Code出现弹框报错,内容为“Remote - Containers Docker version 17.12.0 or later required.”
但其实Docker的版本已经是20往上了,搜到了这个解决办法,但是貌似没啥用。。
第二个坑是,把后面的都配置好之后,点击Debug按钮调试cpp文件,调用的竟然是python的debugger,然后发现是在文档里面,调试过python代码,不知道为啥默认就用了那个,选择gdb也不好使。把之前的目录删了以后,发现可以了。。。
而且同时,再点Attach Visual Studio Code就可以用了。。。所以不知道是不是因为这个影响了第一个问题。
总而言之解决的莫名其妙。
按理说,VS Code这边的Docker插件都能检测到container里面的内容,所有代码均可查看,而且执行Attach to Shell命令,也可以正常进入到docker container里面的命令行,应该说vscode是连接到了container了,不知道为啥会出现第一个问题。
总之解决了。
Step3
点击File按钮,打开/home/autoware/Autoware/src/autoware目录作为工作目录。
Step4
在/home/autoware/Autoware/src/autoware/目录下创建文件夹.vscode
分别创建四个文件,文件名和内容分别如下
c_cpp_properties.json
{"configurations": [{"browse": {"databaseFilename": "","limitSymbolsToIncludedHeaders": true},"includePath": ["/opt/ros/melodic/include/**","/usr/include/**"],"name": "ROS","intelliSenseMode": "gcc-x64","compilerPath": "/usr/bin/clang","cStandard": "c11","cppStandard": "c++14"//"compileCommands": "${workspaceFolder}/build/compile_commands.json"}],"version": 4
}
launch.json
// {
// // Use IntelliSense to learn about possible attributes.
// // Hover to view descriptions of existing attributes.
// // For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
// "version": "0.2.0",
// "configurations": []
// }
{"version": "0.2.0","configurations": [{"name": "(gdb) Launch", // 配置名称,将会在调试配置下拉列表中显示"type": "cppdbg", // 调试器类型 该值自动生成"request": "launch", // 调试方式,还可以选择attach"program": "/home/autoware/Autoware/build/gnss_localizer/devel/lib/gnss_localizer/fix2tfpose", //要调试的程序(完整路径,支持相对路径)"args": [], // 传递给上面程序的参数,没有参数留空即可"stopAtEntry": false, // 是否停在程序入口点(停在main函数开始)"cwd": "${workspaceRoot}", // 调试程序时的工作目录"environment": [], //针对调试的程序,要添加到环境中的环境变量. 例如: [ { "name": "squid", "value": "clam" } ]"externalConsole": false, //如果设置为true,则为应用程序启动外部控制台。 如果为false,则不会启动控制台,并使用VS Code的内置调试控制台。"MIMode": "gdb", // VSCode要使用的调试工具名称"miDebuggerPath": "/usr/bin/gdb","setupCommands": [{"description": "Enable pretty-printing for gdb","text": "-enable-pretty-printing","ignoreFailures": true}]}]
}
settings.json
{"files.associations": {"iostream": "cpp"}
}
task.json
{"version": "2.0.0","tasks": [{"type": "catkin_make","args": ["--directory","/home/autoware/Autoware/src/autoware/","-j4","-DCMAKE_BUILD_TYPE=Debug","-DCATKIN_WHITELIST_PACKAGES=<package_name>"],"problemMatcher": ["$catkin-gcc"],"group": {"kind":"build","isDefault":true},"label": "catkin_make: build"}]}
Step5
在docker container中安装gdb debugger
$ gdb -help
$ sudo apt-get install libc6-dbg gdb valgrind # to install
确保gdb的地址是正确的。检查launch.json文件中包含miDebuggerPath的一行。
Step6
在launch.json文件中,编辑program这一行,指定在/build目录下,比如
/home/autoware/Autoware/build/op_global_planner/devel/lib/op_global_planner/op_global_planner
Step7
在/src目录下找到对应的cpp文件,比如
/home/autoware/Autoware/src/autoware/core_planning/op_global_planner/nodes/op_global_planner.cpp
确保所有的必要topic信息都可以被订阅到,点击debug按钮,并选择"(gdb)launch" debugger
参考链接
Open container fails with “Docker version 17.12.0 or later is required” #5396
Attached container configuration reference
VSCode代码调试器
【VSCode】调试器debugger详细使用手册
第二种方法 – cmake重新编译
Autoware默认编译的版本为release版本,因此需要编译为debug模式来进行调试。
要完成这个任务,需要做几个方面的工作。
- 学习cmake
- 了解Autoware中的编译结构
- 修改CMakeLists.txt文件,并重新编译为debug模式
cmake
Autoware项目是用cmake编译的,首先需要对cmake的用法有所了解。
众所周知,C++中cpp文件无法直接运行,需要编译成.o或.obj这种object目标文件,才能够执行。
使用gcc命令可以分别编译每个cpp文件,但这样很麻烦,cmake则提供了批量编译很多文件的简便方法。
使用方法(简介)
为一个项目建立CMakeLists.txt文件,在文件里按照规定的语法编写,然后执行
$ cmake ..
$ make
命令,会生成编译文件,主要的(应该也是最基础的文件)包括
CMakeCache.txt CMakeFiles cmake_install.cmake Makefile
并可以用make clean命令来清楚生成的object文件
cmake常用目录结构
build
通常为项目创建build目录,在这个目录下执行cmake和make命令,生成的文件都在这下面(除了目标文件),将编译生成的文件都放在build目录下还有一个好处是,重新编译需要删除这些编译文件时,可以直接删除,不会和其他需要的文件混在一起。
bin
通常用来存放生成的object文件,但是也不一定,比如Autoware就放在每个小模块的CMakeFiles文件夹下面
lib
通常用来存放库文件,包括.a静态库和.so动态库。
src
用来存放cpp源文件。
教程
【C++】Cmake使用教程(看这一篇就够了)
【C++】静态库和动态库文件的生成和使用
Autoware编译结构
Autoware路径下的目录结构为
build/ install/ log/ src/
其中:
build文件夹存放了各个模块编译相关的文件,模块目录下的CMakeFiles存放了生成的object文件。
src文件夹存放了CMakeLists.txt文件。比如/home/autoware/Autoware/src/autoware/core_planning/op_global_planner/路径
查看Autoware的编译类型
How to check if program was compiled with debug symbols?
修改CMakeList.txt文件
在CMakeLists.txt文件里增加两行,
set(CMAKE_BUILD_TYPE Debug)
set(CMAKE_BUILD_TYPE RelWithDebInfo)
然后回到build目录,执行以下命令进行编译
$ colcon build --cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo
如果要编译为Release版本,则执行
Without CUDA Support
$ colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
With CUDA support
$ AUTOWARE_COMPILE_WITH_CUDA=1 colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release
参考链接
OpenPlanner项目独立的github链接
https://github.com/hatem-darweesh/autoware.ai.openplanner/tree/dd9bda08e2bb13b0ad501514098f853a38be7732
colcon使用文档
https://colcon.readthedocs.io/en/released/user/quick-start.html
build Autoware from source
https://gitlab.com/autowarefoundation/autoware.ai/autoware/-/wikis/Source-Build?version_id=a33764ab4b6e7a1798c9f79465c74d565e92904b
How to check if program was compiled with debug symbols? [duplicate]
https://stackoverflow.com/questions/3284112/how-to-check-if-program-was-compiled-with-debug-symbols
VSCode debug cpp ROS node - compile package with debug mode
https://answers.ros.org/question/313371/vscode-debug-cpp-ros-node/
C/C++: How do you set GDB debug flag (-g) with cmake?
https://bytefreaks.net/programming-2/cc-how-do-you-set-gdb-debug-flag-g-with-cmake
相关文章:
【工具】使用VS Code调试Docker Container中的代码
目录 使用VS Code调试Docker Container中的Autoware.ai代码第一种方法 -- 在VS Code中进行DebugStep1Step2Step3Step4c_cpp_properties.jsonlaunch.jsonsettings.jsontask.json Step5Step6Step7参考链接 第二种方法 -- cmake重新编译cmake使用方法(简介)…...

ZVL3网络分析仪
ZVL3 Rohde&Schwarz ZVL3 3G矢量网络分析仪|罗德与施瓦茨 9KHz至3GHz 罗德与施瓦茨Rohde&Schwarz 性能特点: 频率范围 9kHz至3GHz/6 GHz(典型值为5kHz) 测量时间(201个测量点,以校准的双端口) <75ms 数据传输(201个测量点) 在100Mbit/sLAN…...

TCP协议
传输层(协议) TCP协议 三次握手协议保证连接建立 四次挥手,利用这个协议断开连接,而且保证连接通道里面数据已经处理完毕 客户端(Socket): 1、创建客户端的Socket对象(Socket)与指…...

69. x 的平方根
给你一个非负整数 x ,计算并返回 x 的 算术平方根 。 由于返回类型是整数,结果只保留 整数部分 ,小数部分将被 舍去 。 注意:不允许使用任何内置指数函数和算符,例如 pow(x, 0.5) 或者 x ** 0.5 。 示例 1࿱…...

Webshell应急响应指南
Webshell应急响应指南 1.Webshell 排查2.入侵时间确定3.Web日志分析4.漏洞分析5.漏洞复现6.清除Webshell并修复漏洞7.Webshell 防御方法1.Webshell 排查 可利用 Webshell 扫描工具(如 D 盾,河马)对应用部署目录进行扫描,如网站D:\WWW\目录 或者将当前网站目录文件与此前备…...
Linux如何定时执行任务
目录 crontab 介绍 安装crontab 服务操作说明 操作案例 crontab 介绍 Linux crontab是采用定期执行程序的命令,当安装完成操作 系统后,默认便会启动此任务调度命令,crond命令每分钟都会定期检查是否要执行任务的工作,如果要执…...
使用nvm替换nvmw作为nodejs的版本切换(亲测)
之前的文章:同时使用vue2.0和vue3.0版本的采坑记录 安装的nvmw,今天想要用nvmw切换时,居然给我报错了: 然后我就走上了使用nvm替换nvmw之路。。 1.安装 nvm-windows下载 下载release版 中Assets中的包,window10&…...
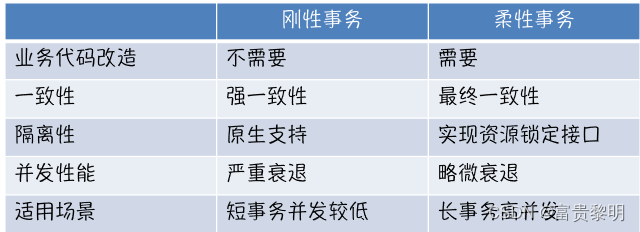
分布式事务
数据库事务 Atomicity 原子性 某个操作,要么全部执行完毕,要么全部回滚 Consistency 一致性 数据库中的数据全都符合现实世界的约束,则这些数据就符合一致性。 比如性别约束男or女,人名币面值不能为负数;出生地址不能…...
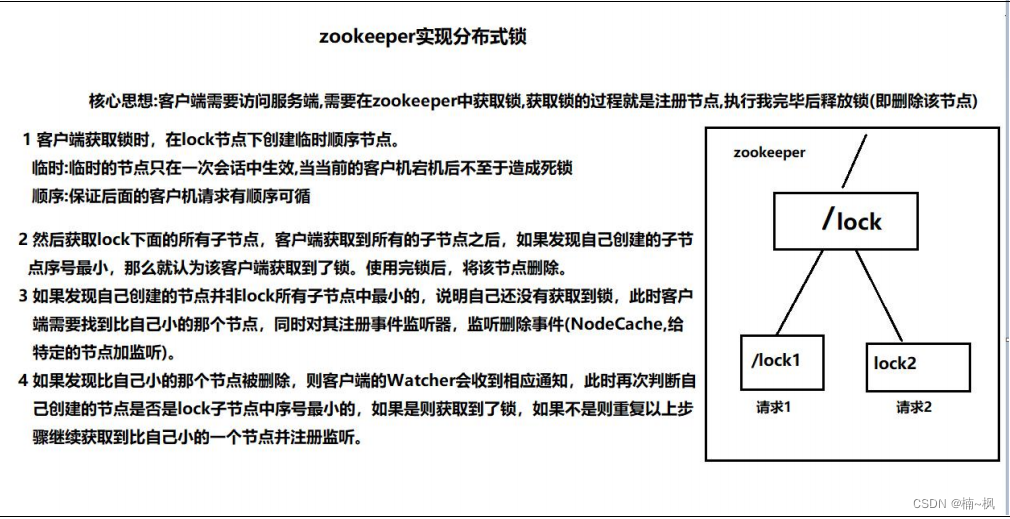
zk111111111111111111
Zookeeper 1 zookeeper(作为 dubbo 的注册中心): 概述: zookeper 是 一个分布式的、开源的分布式应用程序的协调服务,管理分布式应 用 作用: 配置管理,分布式锁,集群管理 2 zookeeper 的安装 (dubbo 的资料中已经整理) 3 zookeeper 的数据模型 zookeeper 是一个树形的服…...

018:Mapbox GL加载Google地图(影像瓦片图)
第018个 点击查看专栏目录 本示例的目的是介绍演示如何在vue+mapbox中加载google地图。 直接复制下面的 vue+mapbox源代码,操作2分钟即可运行实现效果 文章目录 示例效果配置方式示例源代码(共80行)相关API参考:专栏目标示例效果 配置方式 1)查看基础设置:https://xia…...

Web API 和 API 的区别编写api
编写api 自从Roy Fielding博士在2000年他的博士论文中提出(Representational State Transfer)风格的软件架构模式后,REST就基本上迅速取代了复杂而笨重的SOAP,成为Web API的标准了。 什么是Web API呢? 1. Web API 和…...
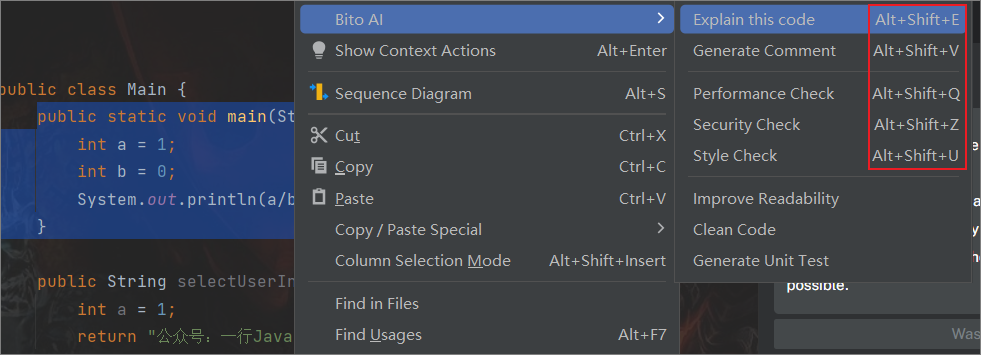
IDEA 用上这款免费 GPT4 插件,生产力爆表了
大家好,我是一航! 早前给大家分享过GPT的一些玩法,但是依旧有很多铁子没有掌握魔法的奥秘,始终没有用上;前两天,一兄台分享给我一款 IDE 插件:Bito-ChatGPT ,安装就能直接在IDE中使…...

1187.使数组严格递增 学习记录
题目描述 给你两个整数数组 arr1 和 arr2,返回使 arr1 严格递增所需要的最小「操作」数(可能为 0)。 每一步「操作」中,你可以分别从 arr1 和 arr2 中各选出一个索引,分别为 i 和 j,0 < i < arr1.l…...

权限控制_SpringSecurity
认证-授权 认证:系统提供的用于识别用户身份的功能,通常提供用户名和密码进行登录其实就是在进行认证,认证的目的是让系统知道你是谁。 授权:用户认证成功后,需要为用户授权,其实就是指定当前用户可以操作…...

2023年最系统的自动化测试,测试开发面试题,10k以下不建议看
鉴于现在严峻的就业形势,千万大学生即将出新手村,今天给大家打包好了2023最能避免薪资倒挂的《面试圣经》。不经一番寒彻骨,怎得梅花扑鼻香。这份面试题,与君共勉! 一、开场白 Q:简单自我介绍一下吧 Q:项…...
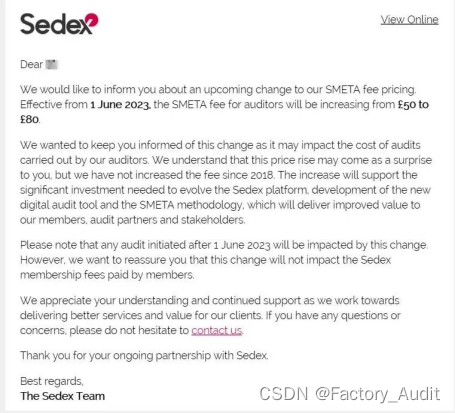
今年SMETA审核费用即将涨价
【今年SMETA审核费用即将涨价】 SMETA全称( Sedex Members Ethical Trade Audit ),即Sedex会员社会道德贸易审核,它是Sedex发起的一种负责任的供应链审计方法/项目。 Sedex是一个全球性的责任商业平台,SMETA是审核方法…...
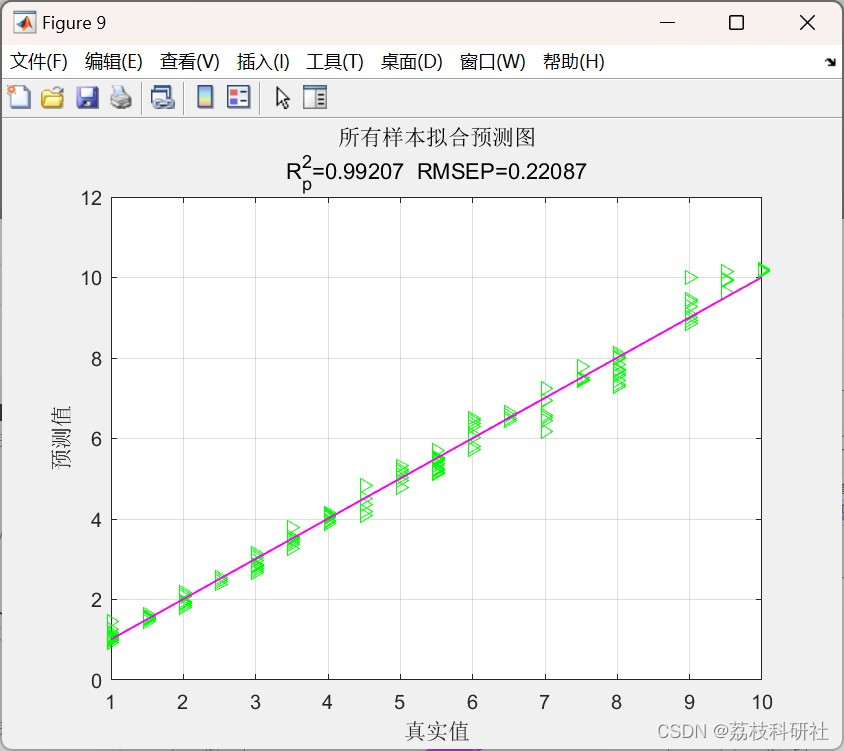
基于贝叶斯优化CNN-LSTM混合神经网络预测(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
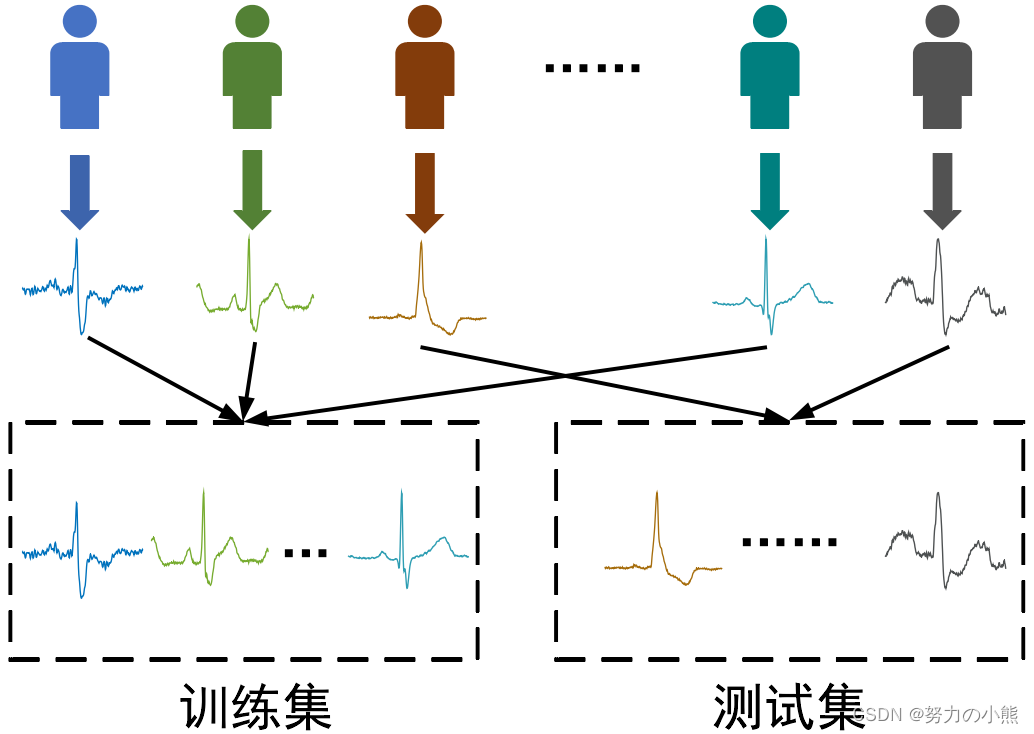
基于深度学习和生理信号的疾病筛查:个体内和个体间研究的价值与应用
一、引言 随着深度学习技术的飞速发展,基于生理信号的疾病筛查和诊断方法在医学领域得到了广泛应用。这些方法通常利用个体内和个体间的生理信号数据,通过训练深度学习模型实现疾病的自动识别和预测。本文将讨论个体内和个体间研究在这一领域的价值和应…...
现在有t1,t2,t3三个线程,实现t1,t2线程同步执行,然后再执行t3线程,使用Java实现该程序
目录 1、利用CountDownLatch 2、利用Future 最近在面试的时候,经常遇到这个题目,首先从题目上看,就知道考察的是多线程方面知识,我第一次看到这个题目的时候,就想到了使用CountDownLatch这个计数器来实现,…...

83.qt qml-初步学习2D粒子影响器(二)
由于QmlBook in chinese翻译过来的文字有些比较生疏难于理解,所以本章在它的基础上做些个人理解,建议学习的小伙伴最好配合QmlBook in chinese一起学习。 QML粒子所有类型: Qt Quick Particles QML Types | Qt Quick 6.5.0 Affector类型: Attractor QML Type | Qt Quick 6.5.…...

如何在安卓设备上安装和配置HMCL-PE:Minecraft Java版移动启动器终极指南
如何在安卓设备上安装和配置HMCL-PE:Minecraft Java版移动启动器终极指南 【免费下载链接】HMCL-PE Hello Minecraft! Launcher for Android 项目地址: https://gitcode.com/gh_mirrors/hm/HMCL-PE 想在手机上畅玩Minecraft Java版却不知从何开始?…...

OpenCore Legacy Patcher:让你的老款Mac重获新生,畅享最新macOS系统
OpenCore Legacy Patcher:让你的老款Mac重获新生,畅享最新macOS系统 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 你是否有一台2008…...

基于SpringAI开发的通用RAG脚手框架,适配各种场景
RAG 业务落地开发指导 本文面向后续把这套 RAG 能力接入业务系统的开发者,重点回答三件事: 上游业务请求怎么进入 RAG。RAG 内部各组件怎么串起来。数据分别存到 MySQL、文件存储、向量库和搜索引擎的哪里。 1. 总体边界 独立工程保留的是一套完整 R…...

API管理平台能力与数据盘点
API管理平台是现代企业IT架构中的核心组件,承担着接口设计、发布、运维、安全管控及生态开放等关键职责。不同平台在功能深度、性能指标和行业实践上各有积累。本文基于公开资料,对五款API管理平台的核心能力与关键数据进行客观梳理,以表格与…...

GBase 8c 在过程里记流水时要小心自治事务边界
GBase 8c 在过程里记流水时要小心自治事务边界 我最近看 GBase 8c 自治事务资料时,觉得它特别适合拿来讨论一个开发现场经常遇到的问题:业务过程失败了,排障流水也跟着回滚了。等真正去查问题时,只剩应用日志里几行模糊报错&#…...
)
别再手动刷新了!Qt5/Qt6下用信号槽优雅处理串口热插拔(避坑QTimer的误用)
Qt串口热插拔检测:从定时轮询到事件驱动的架构升级 在工业控制、医疗设备和物联网终端开发中,串口通信的稳定性直接关系到系统可靠性。传统QTimer轮询方案虽然实现简单,但在实际项目中常遇到两个典型问题:一是频繁的端口扫描造成C…...

告别金融数据壁垒:如何用AKTools一键打通多语言财经数据接口
告别金融数据壁垒:如何用AKTools一键打通多语言财经数据接口 【免费下载链接】aktools AKTools is an elegant and simple HTTP API library for AKShare, built for AKSharers! 项目地址: https://gitcode.com/gh_mirrors/ak/aktools 还在为不同编程语言获取…...

Acton性能调优终极指南:10个提升TON智能合约开发效率的技巧 [特殊字符]
Acton性能调优终极指南:10个提升TON智能合约开发效率的技巧 🚀 【免费下载链接】acton Toolchain for TON smart contract development and beyond 项目地址: https://gitcode.com/GitHub_Trending/acto/acton Acton是TON区块链上强大的智能合约开…...

Python代码质量双保险:Black格式化与类型提示实战指南
1. 项目概述:当代码格式化遇上类型安全在嵌入式开发,尤其是像CircuitPython这样的微控制器编程领域,代码的清晰度和可靠性往往比在桌面环境更为重要。资源受限、调试困难,意味着每一行代码都最好能“一次写对”。我这些年折腾过不…...

AI应用开发与AI Agent开发:小白程序员必备技能,收藏学习迎高薪未来!
本文介绍了AI应用开发和AI Agent开发的核心概念和区别,通过传统后端开发、AI应用开发和AI Agent开发三个场景的对比,阐述了AI技术如何赋能产品和服务。AI应用开发是将大模型能力嵌入产品,而AI Agent开发则是让大模型自主完成任务。文章还结合…...