ROS学习第三十三节——Arbotix使用
https://download.csdn.net/download/qq_45685327/87718484
1.介绍
通过 URDF 结合 rviz 可以创建并显示机器人模型,不过,当前实现的只是静态模型,如何控制模型的运动呢?在此,可以调用 Arbotix 实现此功能。
Arbotix:Arbotix 是一款控制电机、舵机的控制板,并提供相应的 ros 功能包,这个功能包的功能不仅可以驱动真实的 Arbotix 控制板,它还提供一个差速控制器,通过接受速度控制指令更新机器人的 joint 状态,从而帮助我们实现机器人在 rviz 中的运动。
这个差速控制器在 arbotix_python 程序包中,完整的 arbotix 程序包还包括多种控制器,分别对应 dynamixel 电机、多关节机械臂以及不同形状的夹持器。
2.安装 Arbotix
方式1:命令行调用
sudo apt-get install ros-melodic-arbotix
将 <<VsersionName()>> 替换成当前 ROS 版本名称,如果提示功能包无法定位,请采用方式2。
方式2:源码安装
先从 github 下载源码,然后调用 catkin_make 编译
git clone https://github.com/vanadiumlabs/arbotix_ros.git
3.添加 arbotix 所需的配置文件
添加 arbotix 所需配置文件
control.yaml
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controller
controllers: {# 单控制器设置base_controller: {#类型: 差速控制器type: diff_controller,#参考坐标base_frame_id: base_footprint, #两个轮子之间的间距base_width: 0.2,#控制频率ticks_meter: 2000, #PID控制参数,使机器人车轮快速达到预期速度Kp: 12, Kd: 12, Ki: 0, Ko: 50, #加速限制accel_limit: 1.0 }
}
4.launch 文件中配置 arbotix 节点
launch 示例代码
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen"><rosparam file="$(find urdf01_rviz)/config/control.yaml" command="load" /><param name="sim" value="true" /></node>代码解释:
<node> 调用了 arbotix_python 功能包下的 arbotix_driver 节点
<rosparam> arbotix 驱动机器人运行时,需要获取机器人信息,可以通过 file 加载配置文件
<param> 在仿真环境下,需要配置 sim 为 true
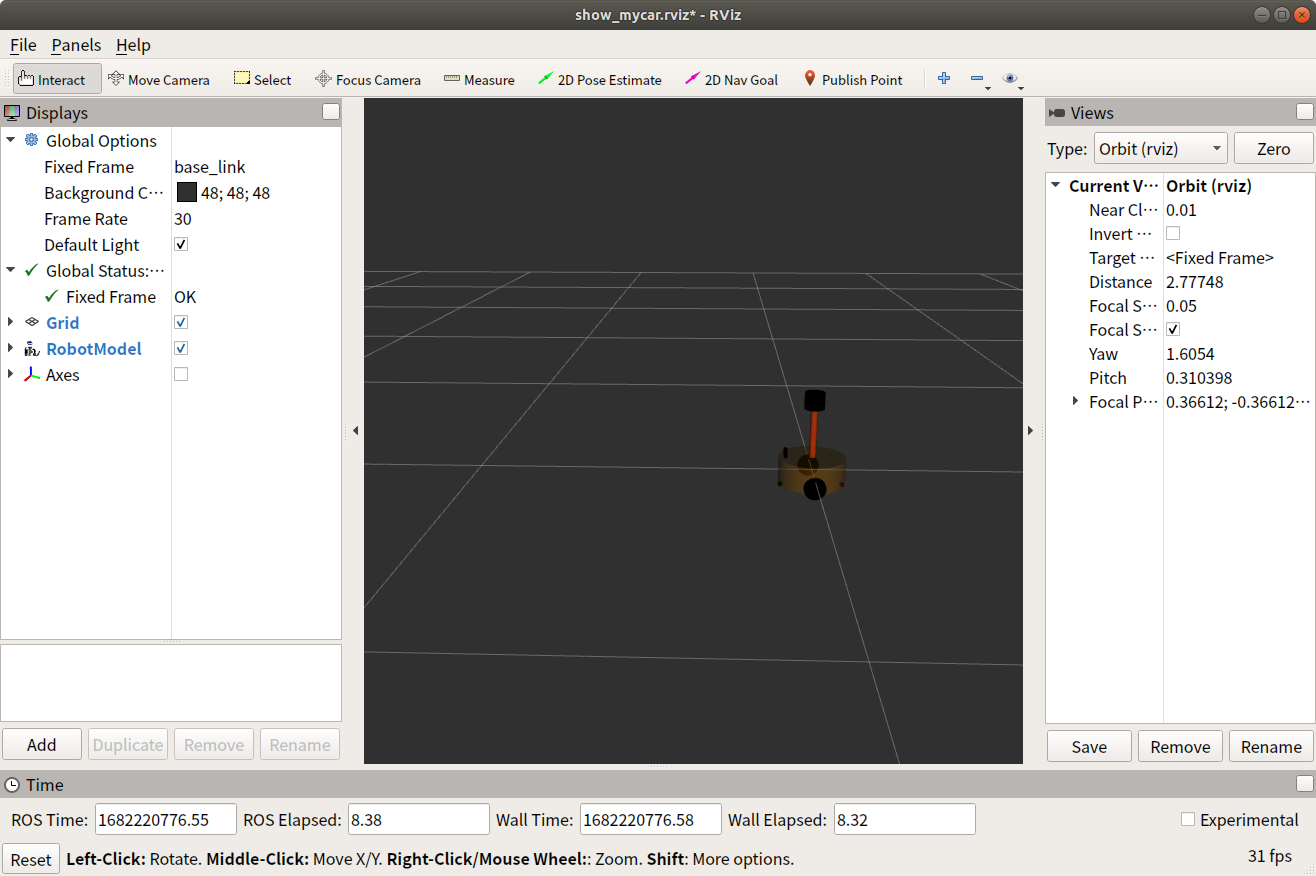
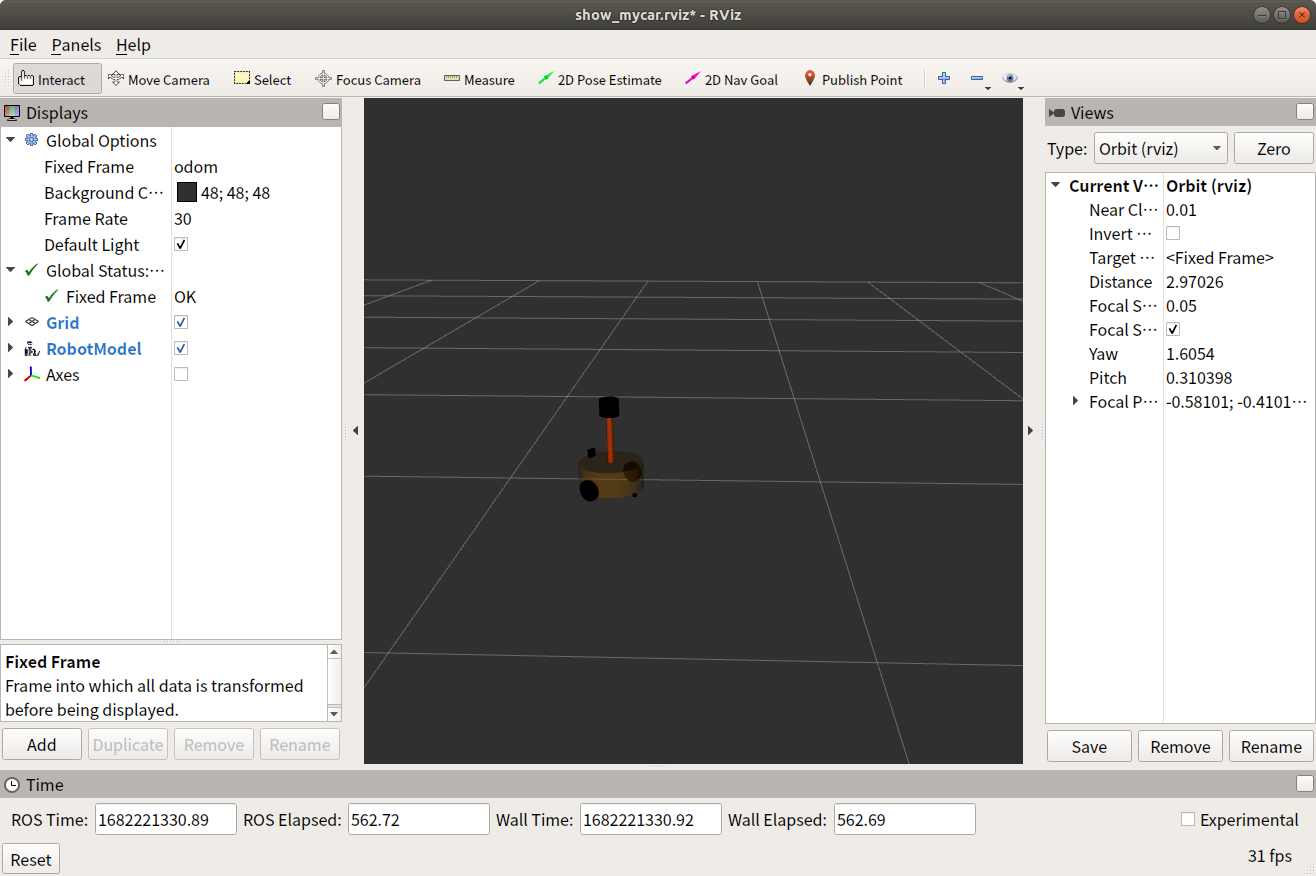
5.启动 launch 文件并控制机器人模型运动
roslaunch urdf01_rviz demo07_control.launch选择odom坐标系
打开一个终端,查看话题列表,并往/cmd_vel发布速度消息
/cmd_vel 是arbotix发布的一个订阅速度的节点
rostopilist
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist "linear:x: 1.0y: 0.0z: 0.0
angular:x: 0.0y: 0.0z: 5.0" 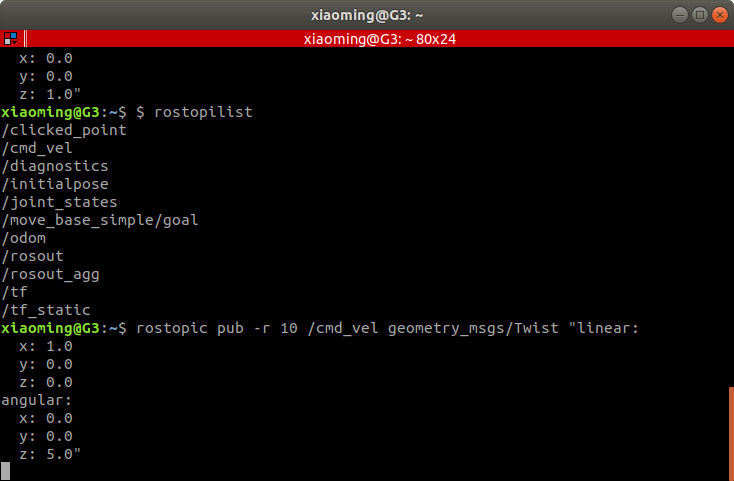

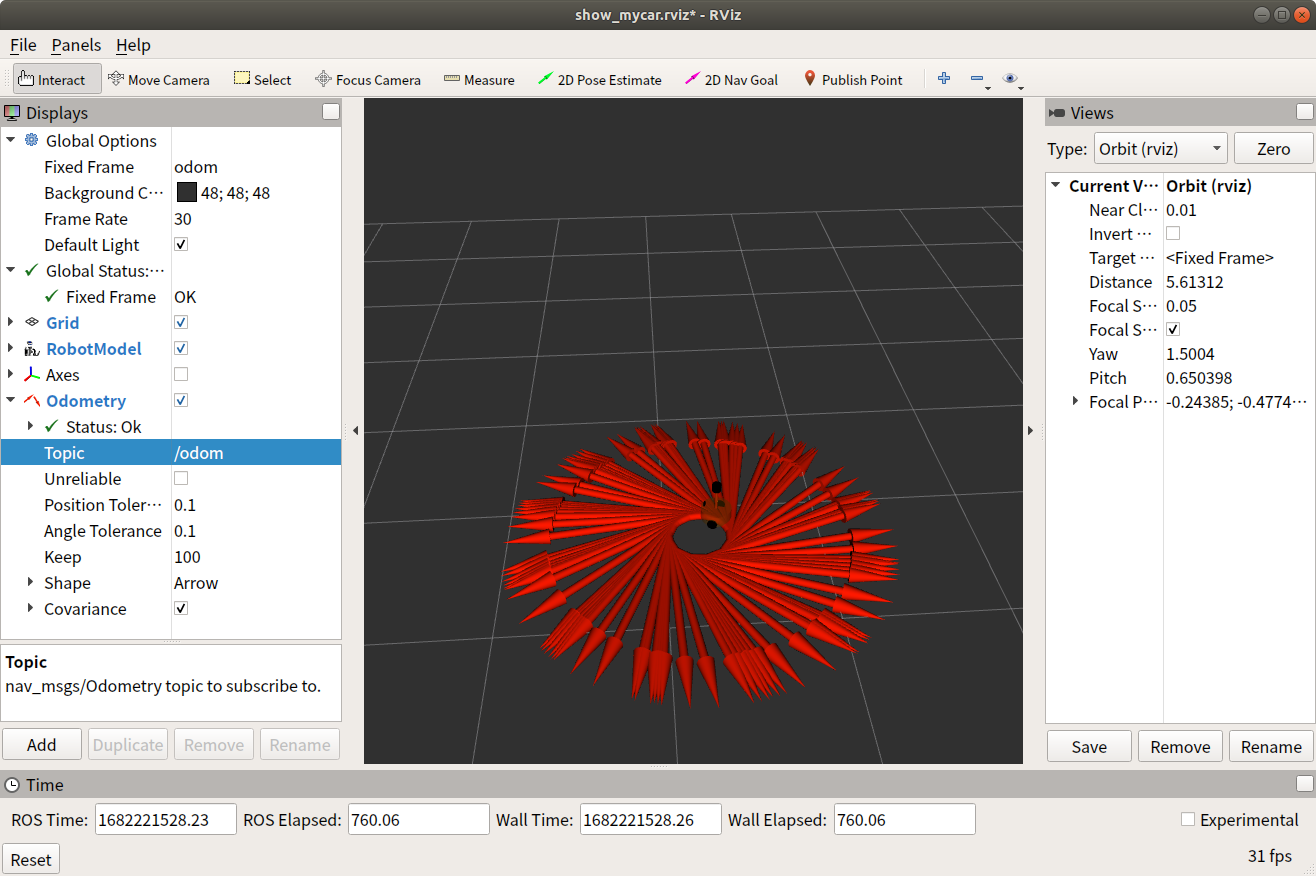
添加Odometry

相关文章:
ROS学习第三十三节——Arbotix使用
https://download.csdn.net/download/qq_45685327/87718484 1.介绍 通过 URDF 结合 rviz 可以创建并显示机器人模型,不过,当前实现的只是静态模型,如何控制模型的运动呢?在此,可以调用 Arbotix 实现此功能。 Arboti…...

ElasticSearch第十九讲 ES-best fields,most fields策略
multi-field多字段搜索 假设有个网站允许用户搜索博客的内容,以下面两篇博客内容文档为例: PUT /my_index/my_type/1 {"title": "Quick brown rabbits","body": "Brown rabbits are commonly seen." }PUT /my_index/my_type/2 {&…...

Netty详解,5分钟了解,面试不用慌
1. 概述 1.1 Netty 是什么? Netty is an asynchronous event-driven network application framework for rapid development of maintainable high performance protocol servers & clients. Netty 是一个异步的、基于事件驱动的网络应用框架,用…...
Logstash学习
一、Logstash基础 1、什么是Logstash logstash是一个数据抽取工具,将数据从一个地方转移到另一个地方。下载地址:https://www.elastic.co/cn/downloads/logstash logstash之所以功能强大和流行,还与其丰富的过滤器插件是分不开的ÿ…...
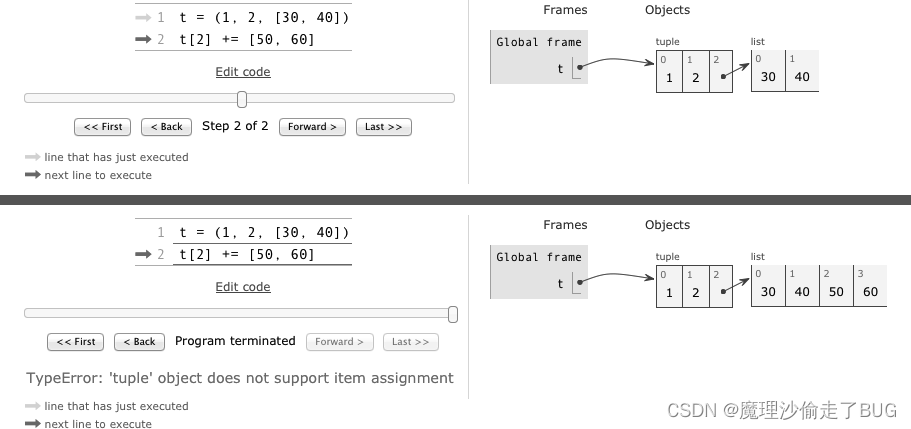
【流畅的Python学习笔记】2023.4.22
此栏目记录我学习《流畅的Python》一书的学习笔记,这是一个自用笔记,所以写的比较随意 元组 元组其实是对数据的记录:元组中的每个元素都存放了记录中一个字段的数据,外加这个字段的位置。简单试试元组的特性: char…...

使用django_celery_beat在admin后台配置计划任务
一、依赖包的安装 django中使用celery做异步任务和计划任务最头疼的点就是包之间版本兼容性问题,项目一启动花花报错,大概率都是版本问题。每次都会花很大时间在版本兼容性问题上。本例使用如下版本: Django3.2 celery5.2.7 django-celery-b…...
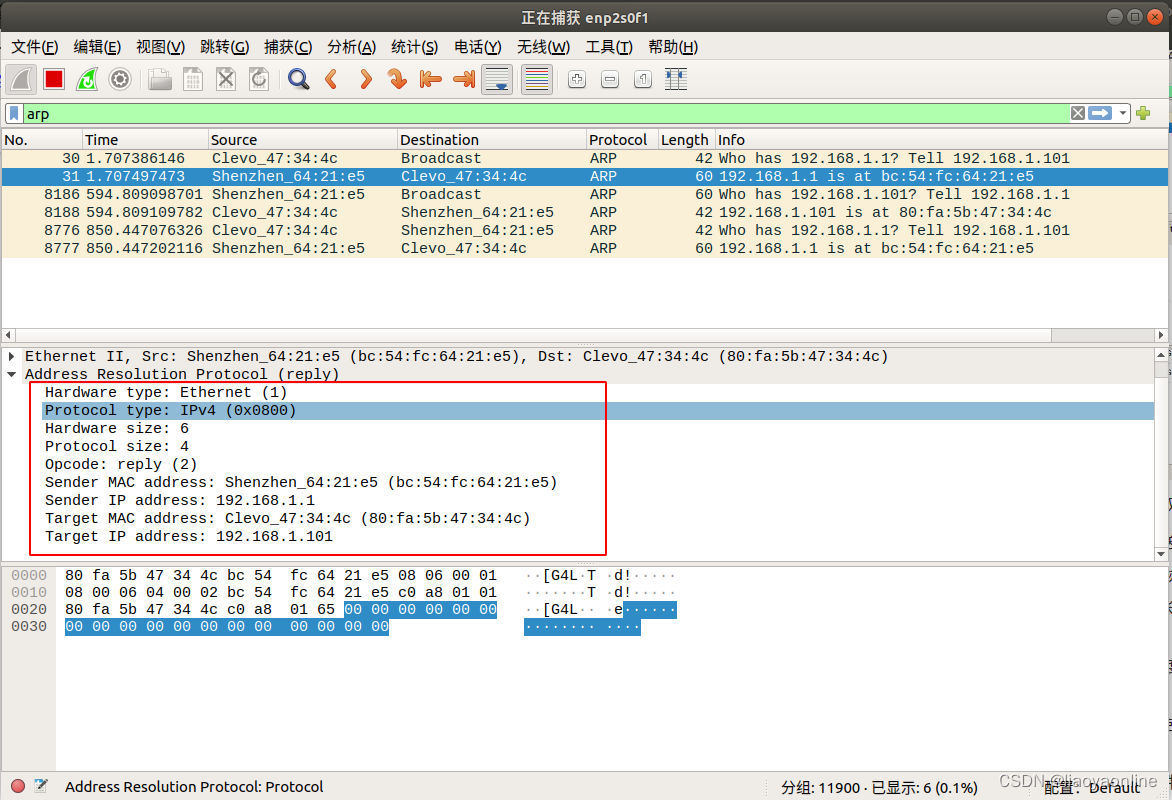
ARP协议详解
ARP协议详解 文章目录 ARP协议详解ARP协议介绍ARP抓包ARP包解析 ARP协议介绍 ARP(Address Resolution Protocol)是一种用于将网络层地址(如IP地址)转换为数据链路层地址(如MAC地址)的协议,当一…...

不同数量的预测框和Ground Truth框计算IoU
import numpy as npdef calculate_iou(boxes1, boxes2):# 转换为 numpy 数组boxes1 np.array(boxes1)boxes2 np.array(boxes2)# 扩展维度,以便广播计算boxes1 np.expand_dims(boxes1, axis1)boxes2 np.expand_dims(boxes2, axis0)# 计算两组框的交集坐标范围x_m…...
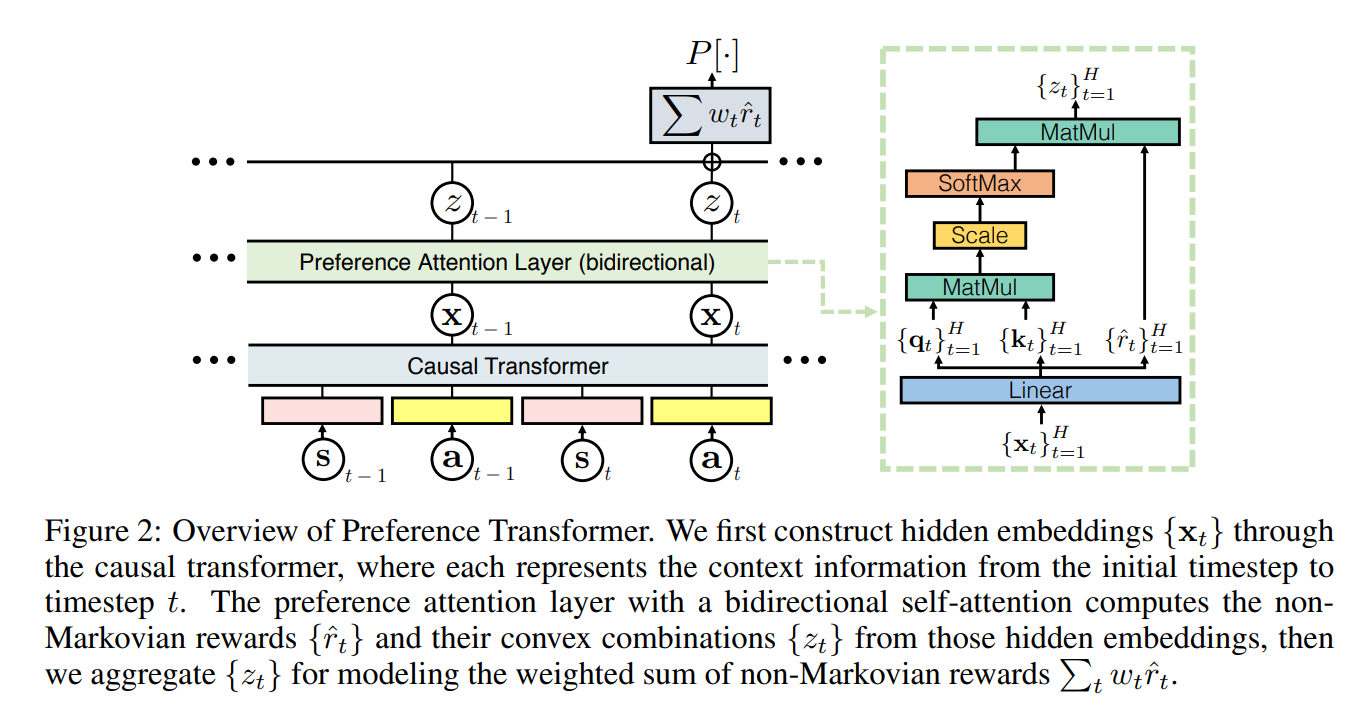
偏好强化学习概述
文章目录 为什么需要了解偏好强化学习什么是偏好强化学习基于偏好的马尔科夫决策过程(Markov decision processes with preferences,MDPP) 反馈类型分类学习算法分类近似策略分布(Approximating the Policy Distribution)比较和排序策略(Comp…...

苹果笔到底有没有必要买?苹果平板电容笔排行榜
事实上,Apple Pencil与市场上普遍存在的电容笔最大的区别,就是两者的重量以及所具有的压感都互不相同。但是,苹果原有的电容笔因其昂贵的价格而逐步被平替电容笔所替代,而平替电容笔所具备的各种性能也在逐步提高。接下来…...
learn_C_deep_6 (布尔类型、布尔与“零值“、浮点型与“零值“、指针与“零值“的比较)
目录 语句和表达式的概念 if语句的多种语法结构 注释的便捷方法(环境vs) if语句执行的过程 逻辑与&& 逻辑或|| 运算关系的顺序 else的匹配原则 C语言有没有布尔类型 C99标准 sizeof(bool)的值为多少? _Bool原码 BOOL…...

JavaScript日期库之date-fn.js
用官网的话来说,date-fn.js 就是一个现代 JavaScript 日期实用程序库,date-fns 为在浏览器和 Node.js 中操作 JavaScript 日期提供了最全面、但最简单和一致的工具集。那实际用起来像它说的那么神奇呢,下面就一起来看看吧。 安装 安装的话就…...

五一假期出游攻略【诗与远方】
原文在:PUSDN 可以导入作为模板引用。 五一旅行计划 假期倒计时 [该类型的内容暂不支持下载] 本次目标:五一旅行计划【画饼版】 前言 任何一个地方,一个城市,都有可观赏的地方,如果没去过邢台的,建议五一去…...
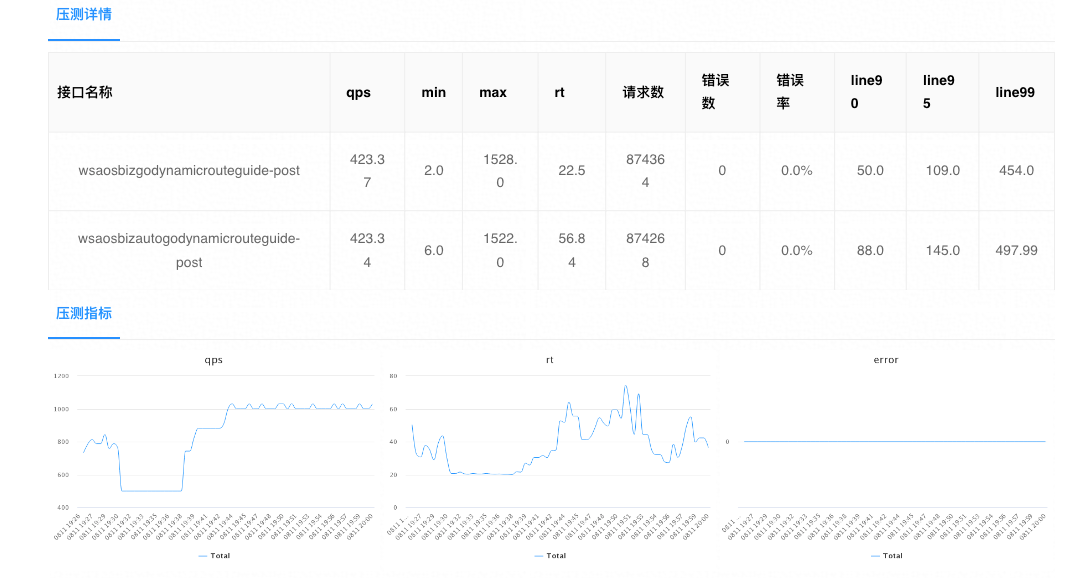
怎样正确做web应用的压力测试?
web应用,通俗来讲就是一个网站,主要依托于浏览器实现其功能。 提到压力测试,我们想到的是服务端压力测试,其实这是片面的,完整的压力测试包含服务端压力测试和前端压力测试。 下文将从以下几部分内容展开:…...

Hibernate的持久化类
Hibernate是一个开源的ORM(对象关系映射)框架,用于将Java程序中的对象映射到数据库中的关系型数据。在Hibernate中,持久化类是用来映射Java对象和关系型数据库表的类。 编写Hibernate持久化类需要遵循以下规则: 持久…...
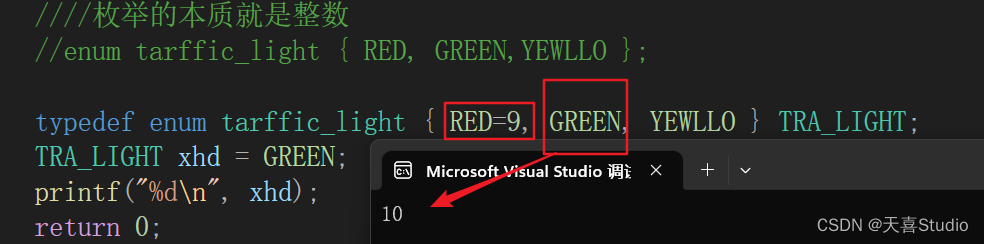
【c语言】enum枚举类型的定义格式 | 基本用法
创作不易,本篇文章如果帮助到了你,还请点赞支持一下♡>𖥦<)!! 主页专栏有更多知识,如有疑问欢迎大家指正讨论,共同进步! 给大家跳段街舞感谢支持!ጿ ኈ ቼ ዽ ጿ ኈ ቼ ዽ ጿ ኈ ቼ ዽ ጿ…...

Python数据挖掘与机器学习
近年来,Python编程语言受到越来越多科研人员的喜爱,在多个编程语言排行榜中持续夺冠。同时,伴随着深度学习的快速发展,人工智能技术在各个领域中的应用越来越广泛。机器学习是人工智能的基础,因此,掌握常用…...

Java有用的书籍2
. 1.《Effective Java》是由Joshua Bloch撰写的一本Java编程规范和最佳实践指南,第三版是最新版。它涵盖了Java编程中一些常见问题和技巧,以及如何编写更加优雅、健壮和高效的Java代码。 该书共分为15章,每一章都涵盖了Java编程中的一个关键…...
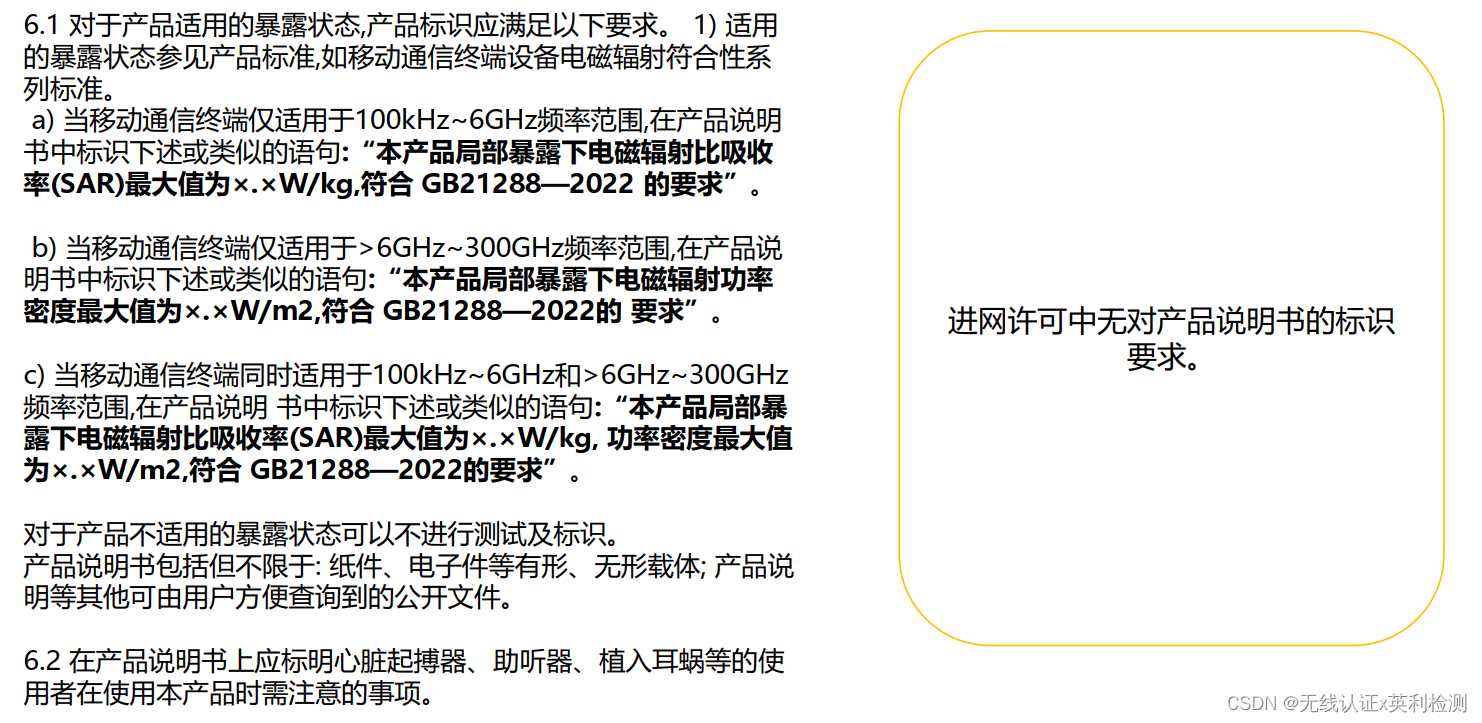
CTA进网测试《5G消息 终端测试方法》标准依据:YDT 3958-2021
GB 21288-2022 强制国标要求变化 与GB 21288-2007相比, 新国标主要有以下变化: 1. 增加职业暴露定义: 2. 增加吸收功率密度定义: 3. 增加不同频率、不同人体部位适用的暴露限值: 4. 增加产品说明书的注释:…...

[LeetCode复盘] LCCUP‘23春季赛 20230422
[LeetCode复盘] LCCUP23春季赛 20230422 一、总结二、 1. 补给马车1. 题目描述2. 思路分析3. 代码实现 三、2. 探险营地1. 题目描述2. 思路分析3. 代码实现 四、 3. 最强祝福力场1. 题目描述2. 思路分析3. 代码实现 五、 4. 传送卷轴1. 题目描述2. 思路分析3. 代码实现 六、 5…...

RT-Trace升级:集成GDB Server与一键烧录,打造嵌入式开发调试平台
1. 项目概述:嵌入式开发的“瑞士军刀”再进化如果你是一名嵌入式开发者,最近可能被一个词刷屏了——RT-Trace。这已经不是它第一次带来惊喜了。最初,它以非侵入式的实时追踪和性能分析能力,在RT-Thread社区里掀起了一阵热潮&#…...

VM振弦采集模块精度实测:从标准信号源到误差分析全流程
1. 项目概述与核心价值最近在做一个岩土工程安全监测的项目,其中有个环节让我琢磨了好一阵子:如何准确地评估我们用的那批VM振弦采集模块的测量精度。这玩意儿在结构健康监测、桥梁隧道、边坡稳定性监测里用得非常多,核心任务就是读取振弦式传…...

ElevenLabs波斯文TTS落地难题全破解:从Unicode乱码、音节切分失败到自然语调合成的5大技术卡点
更多请点击: https://codechina.net 第一章:ElevenLabs波斯文TTS落地难题全破解:从Unicode乱码、音节切分失败到自然语调合成的5大技术卡点 波斯文(Farsi)作为右向左(RTL)、连字密集、元音隐含…...

从扁平到触手可及,Midjourney拟物化全流程拆解,含12组高复用材质参数模板与避坑清单
更多请点击: https://kaifayun.com 第一章:从扁平到触手可及:Midjourney拟物化设计范式跃迁 当UI设计从iOS 7的极简扁平风席卷全球,我们曾笃信“去装饰即高级”。而Midjourney V6起悄然掀起一场静默革命——它不再满足于生成“看…...

标准化封装国产电源:钡特电源 VB50-24S24LD 与金升阳 URB2424LD-50WR3 同属工业高可靠
在工业电子系统设计中,工业 DC-DC 电源模块作为核心供电单元,其标准化程度、稳定性及适配性直接影响设备整体可靠性与研发效率。钡特电源 VB50-24S24LD 与金升阳 URB2424LD-50WR3 作为 50W 级国产工业 DC-DC 代表产品,均采用国际标准封装引脚…...

日薪2700的护网HW面试,以及HW全面熟悉必看流程
前言 参与hvv的事情还是要想办法规避掉很多坑的。网络安全这个行业现阶段还是主要政策驱动,后面应该是客户意识,现在用户教育成本明显比以前低太多。 1.关于HVV的一个简单流程 首先我带大家从甲方和厂商的角度来分解一下整个护网流程的核心逻辑 第一阶段…...

【大模型12步学习路线 · 第12步 · ①原理篇】多模态 LLM + Multimodal RAG 全景:从 Qwen3-VL 到 ColPali / ColQwen2.5,让 LLM看懂Spec
【大模型12步学习路线 第12步 ①原理篇】多模态 LLM + Multimodal RAG 全景:从 Qwen3-VL 到 ColPali / ColQwen2.5,让 LLM"看懂"Spec 时序图 系列定位:「大模型正确学习顺序」12 步系列 第 12 步 多模态 的 ①原理篇 —— 最后一步,Veri-Copilot v1.0 大结局。 前…...

经手100万+终端后,聊聊校园门锁Sub-1G和Cat.1怎么选
做校园联网门锁项目的人大概都遇到过这个纠结:组网方案到底选Sub-1G还是4G Cat.1?我们团队(KEENZY中科易安)经手了100万在线终端的运行数据,可以明确地说——两种方案没有绝对的优劣,只有场景是否匹配。选错…...

AI人工智能行业的发展:从机器学习到深度学习的演变历程
在数字化浪潮席卷全球的当下,人工智能(AI)已然成为推动各行业变革的核心力量。对于软件测试从业者而言,深入了解AI从机器学习到深度学习的演变历程,不仅能把握技术发展脉络,更能为测试工作的智能化转型提供…...

冲压送料机远程监控运维管理系统方案
某设备制造商,常年向汽车零部件、电子元器件等行业客户供应各类冲压送料设备,随着市场拓展,其售后运维面临诸多突出问题。一方面,设备分布地域广泛,客户上报故障后,售后服务往往响应滞后且运维成本居高不下…...