【VM服务管家】VM4.x算子SDK开发_3.3 模块工具类
目录
- 3.3.1 位置修正:位置修正算子工具的使用方法
- 3.3.2 模板保存:实现模板自动加载的方法
- 3.3.3 模板匹配: 获取模板匹配框和轮廓点的方法
- 3.3.4 模板训练:模板训练执行完成的判断方法
- 3.3.5 图像相减:算子SDK开发图像相减的方法
- 3.3.6 图像修正:图像修正工具的使用方法
- 3.3.7 Blob工具:Blob工具的使用方法
- 3.3.8 点点测量:点点测量工具的使用方法
- 3.3.9 亮度测量:亮度测量工具的使用方法
- 3.3.10 圆查找:圆查找的方法
- 3.3.11 仿射变换:图像仿射变换的使用方法
- 3.3.12 直线查找:直线查找工具的使用方法
- 3.3.13 缺陷检测:直线边缘缺陷检测工具的使用方法
- 3.3.14 N点标定:N点标定的使用方法
- 3.3.15 畸变校正:畸变校正的使用方法
- 3.3.16 字符识别:多线程同时读取同一个本地模型的方法
- 3.3.17 字符识别:VM自带字符识别模型的区分
- 3.3.18 设置掩膜:给模块设置掩膜的方法
3.3.1 位置修正:位置修正算子工具的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:位置修正工具使用方法
解答
示例代码如下:
1. C#
2.
3. bool re = true;
4. //位置修正基准参数
5. CPositionFixTool PosFixToolObj = new CPositionFixTool();
6. CPositionFixBasicParam BasicParam = PosFixToolObj.BasicParam;
7. VisionDesigner.PositionFix.MVD_FIDUCIAL_POINT_F stBasinInit = new VisionDesigner.PositionFix.MVD_FIDUCIAL_POINT_F();
8. stBasinInit.stPosition.fX = MatchPoint.X;
9. stBasinInit.stPosition.fY = MatchPoint.Y;
10. stBasinInit.fAngle = Angle;
11. BasicParam.BasePoint = stBasinInit;//设置基准点
12. //位置修正运行参数
13. VisionDesigner.PositionFix.MVD_FIDUCIAL_POINT_F stBasicRun = new VisionDesigner.PositionFix.MVD_FIDUCIAL_POINT_F();
14. stBasicRun.stPosition.fX = stPositionfX;
15. stBasicRun.stPosition.fY = stPositionfY;
16. stBasicRun.fAngle = stPositionAngle;
17. BasicParam.RunningPoint = stBasicRun;//设置运行点
18. //获取工具位置修正后Roi
19. MVD_SIZE_I stImageSize = new MVD_SIZE_I();
20. stImageSize.nWidth = ImageWidth;
21. stImageSize.nHeight = ImageHeight;
22. BasicParam.RunImageSize = stImageSize;
23. BasicParam.FixMode = MVD_POSFIX_MODE.MVD_POSFIX_MODE_HVA;
24. PosFixToolObj.BasicParam.InitialShape = SrcRegionROI;
25. PosFixToolObj.Run();
26. DesRegionROI = PosFixToolObj.Result.CorrectedShape;
问题根因
不熟悉位置修正算子工具使用方法
3.3.2 模板保存:实现模板自动加载的方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
问题:用户在使用算子SDK开发的模板匹配功能时,希望能在程序运行时可以自动加载之前训练过的模板。
解答
可以使用模板的导入导出方法,步骤如下:
第一步:程序初始化时导入模板
1. C#
2.
3. public FrmMain()
4. {
5. InitializeComponent();
6. if (File.Exists(savePatternPath))//判断文件是否存在
7. {
8. pattern.ImportPattern(savePatternPath);
9. }
10. }
第二步:加载模板训练窗口时进行赋值
11. C#
12.
13. private void FrmTempleteMatch_Load(object sender, EventArgs e)
14. {
15. mvdAlmightyPatternEdit1.SetSubject(savePattern);
16. }
第三步:在关闭训练窗口时导出模板:
17. C#
18.
19. private void FrmTempleteMatch_FormClosing(object sender, FormClosingEventArgs e)
20. {
21. savePattern.ExportPattern(savePatternPath);
22. }
问题根因
不熟悉SDK算子的相关方法。
3.3.3 模板匹配: 获取模板匹配框和轮廓点的方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:如何获取模板匹配轮廓点?
解答
依次实例化模板匹配工具、设置输入图像、设置ROI、运行、获取匹配点、轮廓点,示例代码如下:
C#
cHPFeaturePattern = new CHPFeaturePattern();
cHPFeaturePatMatchTool.InputImage = cMvdImage;
cHPFeaturePatMatchTool.Pattern = cHPFeaturePattern;
cHPFeaturePatMatchTool.ROI = cROI;
cHPFeaturePatMatchTool.BasicParam.ShowOutlineStatus = true; // 显示轮廓
cHPFeaturePatMatchTool.Run();
CHPFeaturePatMatchResult cHPFeaturePatMatchResult = cHPFeaturePatMatchTool.Result;
var OutlineList = cHPFeaturePatMatchResult.OutlineList;
foreach (var item in cHPFeaturePatMatchResult.MatchInfoList)
{var matchBox = new CMvdRectangleF(item.MatchBox.CenterX, item.MatchBox.CenterY, item.MatchBox.Width, item.MatchBox.Height);matchBox.Angle = item.MatchBox.Angle;matchBox.BorderColor = new MVD_COLOR(255, 0, 0, 255);mvdRenderActivex1.AddShape(matchBox);
}
if (cHPFeaturePatMatchTool.BasicParam.ShowOutlineStatus)
{foreach (var item in cHPFeaturePatMatchResult.OutlineList){CMvdPointSetF pointSetG = new CMvdPointSetF();CMvdPointSetF pointSetY = new CMvdPointSetF();CMvdPointSetF pointSetR = new CMvdPointSetF();foreach (var point in item.EdgePointList){if (0 == point.Score){pointSetG.AddPoint(point.Position.fX, point.Position.fY);}else if (1 == point.Score){pointSetY.AddPoint(point.Position.fX, point.Position.fY);}else if (2 == point.Score){pointSetR.AddPoint(point.Position.fX, point.Position.fY);}}pointSetG.BorderColor = new MVD_COLOR(0, 255, 0, 255);//绿色得分高的点pointSetY.BorderColor = new MVD_COLOR(255, 255, 0, 255);//黄色得分低的点pointSetR.BorderColor = new MVD_COLOR(255, 0, 0, 255);//红色丢弃的点if (0 != pointSetG.PointsList.Count){mvdRenderActivex1.AddShape(pointSetG);matchOutlineList.Add(pointSetG);}if (0 != pointSetY.PointsList.Count){mvdRenderActivex1.AddShape(pointSetY);matchOutlineList.Add(pointSetY);}if (0 != pointSetR.PointsList.Count){mvdRenderActivex1.AddShape(pointSetR);matchOutlineList.Add(pointSetR);}}
}
问题根因
不熟悉如何获取匹配框和匹配点
3.3.4 模板训练:模板训练执行完成的判断方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象: 算子SDK开发打开模板匹配后未训练模板,但模板状态不为null。.
解答
模板是否训练完成的条件不应以模板是否等于null来判断,模板是否训练成功以模板的结果来判断,C#代码如下:
1. C#
2.
3. if(pattern != null){}//判断模板是否为空
4. if(pattern.ReginList.Count != 0){}//判断模板训练的区域个数是否为0
5. if( pattern1.GetPatternResult() != null){}//判断模板是否训练成功
问题根因
不熟悉SDK算子的相关方法。
3.3.5 图像相减:算子SDK开发图像相减的方法
描述
环境:MVDAlgrithm SDK3.4及以上+ VS2013及以上
现象:WinForm下的算子SDK图像相减的使用方法
解答
WinForm下进行算子SDK开发时图像相减的使用方法,先定义一个图像基准图像CMvdImageimage1,图像修正后的图像CMvdImage image2,注意,image2是图像修正后的图像。
1. C#
2.
3. if (image1.Width == image2.Width && image1.Height == image2.Height && image1.PixelFormat == image2.PixelFormat)
4. {
5. CMvdImage diffImage = new CMvdImage();
6. diffImage.InitImage(image1.Width,image1.Height, image1.PixelFormat);
7. for (uint row = 0; row < image1.Height; row++)
8. {
9. uint nStep = image1.GetImageData(0).nRowStep;
10. for (uint col = 0; col < nStep; col++)
11. {
12. diffImage.GetImageData(0).arrDataBytes[row * nStep + col] = (byte)Math.Abs(image1.GetImageData(0).arrDataBytes[row * nStep + col] -image2.GetImageData(0).arrDataBytes[row * nStep + col]);
13. }
14. }
15. return diffImage;
16. }
问题根因
不熟悉SDK算子的相关方法。
3.3.6 图像修正:图像修正工具的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:算子SDK开发图像修正的使用方法
解答
首先将工具实例化、工具参数赋值,示例代码如下
1. C#
2.
3. CImageFixtureTool tool = new CImageFixtureTool();
4. tool.InputImage = inputImage;
5. tool.BasicParam.FixMode = MVD_IMGFIX_MODE.MVD_IMGFIX_MODE_HVA;
6. tool.BasicParam.BasePoint = new VisionDesigner.ImageFixture.MVD_FIDUCIAL_POINT_F(basePoint, baseAngle);//基准点
7. tool.BasicParam.RunningPoint = new VisionDesigner.ImageFixture.MVD_FIDUCIAL_POINT_F(runPoint, runAngle);//运行点
8. tool.Run();
问题根因
不熟悉SDK算子的相关方法。
3.3.7 Blob工具:Blob工具的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:算子SDK开发Blob工具的使用方法
解答
首先将工具实例化、工具参数赋值,然后使用位置修正工具进行位置修正,最后绘制Blob框。示例代码如下
1. C#
2. CBlobFindTool tool = new CBlobFindTool();
3. tool.BasicParam.ShowOutlineStatus = true;
4. tool.BasicParam.ShowBlobImageStatus = true;
5. tool.InputImage = inputImage;
6. if (BlobRoi != null){ tool.ROI = BlobRoi;}
7. tool.SetRunParam("Polarity", "BrightObject");//Blob工具参数设置
8. tool.SetRunParam("LowThreshold", "180");
9. tool.SetRunParam("HightThreshold", "255");
10. tool.SetRunParam("MinArea", "5");
11. tool.SetRunParam("MaxArea", "5000");
12. tool.Run();
13. List<CBlobInfo> blobInfoList = tool.Result.BlobInfo;
14. CPositionFixTool fixTool = new CPositionFixTool();//位置修正
15. fixTool.BasicParam.BasePoint = new VisionDesigner.PositionFix.MVD_FIDUCIAL_POINT_F(basePoint, baseAngle);
16. fixTool.BasicParam.RunImageSize = new MVD_SIZE_I((int)inputImage.Width, (int)inputImage.Height);
17. mvdRenderActivex1.ClearShapes();
18. foreach (var blobInfo in blobInfoList)//绘制blob框数据
19. {
20. CMvdRectangleF rectangleF = blobInfo.BoxInfo;
21. rectangleF.BorderColor = new MVD_COLOR(0xFF, 0x00, 0x00);
22. rectangleF.BorderWidth = 2;
23. fixTool.BasicParam.InitialShape = rectangleF;
24. fixTool.BasicParam.RunningPoint = new VisionDesigner.PositionFix.MVD_FIDUCIAL_POINT_F(runPoint, runAngle);
25. fixTool.BasicParam.FixMode = MVD_POSFIX_MODE.MVD_POSFIX_MODE_HVA;
26. fixTool.Run();
27. mvdRenderActivex1.AddShape(fixTool.Result.CorrectedShape);
28. }
问题根因
不熟悉相关接口的使用。
3.3.8 点点测量:点点测量工具的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:算子SDK开发点点测量工具的使用方法
解答
首先将工具实例化,然后选择两个点,下面以测量两个圆的圆心距为例,示例代码如下
1. C#
2.
3. float distance;
4. VisionDesigner.P2PMeasure.CP2PMeasureTool cP2PMeasureTool = new VisionDesigner.P2PMeasure.CP2PMeasureTool;
5. cP2PMeasureTool.BasicParam.Point1 = cCirFindTool1.Result.CircleCenter;
6. cP2PMeasureTool.BasicParam.Point2 = cCirFindTool2.Result.CircleCenter;
7. cP2PMeasureTool.Run();
8. distance= cP2PMeasureTool.Result.Dist();
问题根因
不熟悉相关接口的使用。
3.3.9 亮度测量:亮度测量工具的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:算子SDK开发亮度测量工具的使用方法
解答
首先将工具实例化,输入图片,最后设置ROI参数,示例代码如下:
1. C#
2.
3. VisionDesigner.IntensityTool.CIntensityToolTool cIntensityToolTool = newVisionDesigner.IntensityTool.CIntensityToolTool();
4. VisionDesigner.CMvdImage InputImg = new CMvdImage();
5. InputImg.InitImage("Input.bmp");
6. cIntensityToolTool.InputImage = InputImg;
7. cIntensityToolTool.ROI = new VisionDesigner.CMvdRectangleF(InputImg.Width / 2, InputImg.Height / 2, InputImg.Width / 4, InputImg.Height / 4);
8. cIntensityToolToolObj.Run();
问题根因
不熟悉相关接口的使用。
3.3.10 圆查找:圆查找的方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:WinForm下的算子SDK圆查找的使用方法
解答
WinForm下进行算子SDK开发时圆查找的使用方法
第一步,初始化参数列表让用户修改参数。
第二步,加载图像,设置ROI等参数,执行找圆操作。
1. C#
2. //第一步,初始化参数
3. try
4. {
5. VisionDesigner.CircleFind.CCircleFindTool m_cCircleFindToolObj =newVisionDesigner.CircleFind.CCircleFindTool();
6. //Set input image
7. VisionDesigner.CMvdImage cInputImg = new CMvdImage();
8. cInputImg.InitImage("InputTest.bmp");
9. m_cCircleFindToolObj.InputImage = cInputImg;
10. // Set ROI region (optional)
11. m_cCircleFindToolObj.ROI = new VisionDesigner.CMvdRectangleF(cInputImg.Width / 2, cInputImg.Height / 2, cInputImg.Width / 4, cInputImg.Height / 4);
12. //保存参数设置
13. byte[] fileBytes = new byte[256];
14. uint nConfigDataSize = 256;
15. uint nConfigDataLen = 0;
16. try
17. {
18. m_cCircleFindToolObj.SaveConfiguration(fileBytes, nConfigDataSize, ref nConfigDataLen);
19. }
20. catch (MvdException ex)
21. {
22. if (MVD_ERROR_CODE.MVD_E_NOENOUGH_BUF == ex.ErrorCode)
23. {
24. fileBytes = new byte[nConfigDataLen];
25. nConfigDataSize = nConfigDataLen;
26. m_cCircleFindToolObj.SaveConfiguration(fileBytes, nConfigDataSize, ref nConfigDataLen);
27. }
28. else
29. {
30. throw ex;
31. }
32. }
33. }
34. //第二步,加载图片并运行
35. m_cCircleFindToolObj.Run();
36. //输出结果
37. CCircleFindResult circleFindResult = m_CircleFindTool.Result;
问题原因
参数设置错误
3.3.11 仿射变换:图像仿射变换的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:WinForm下的算子SDK图像仿射变换的使用方法
解答
WinForm下进行算子SDK开发时图像仿射变换的使用方法
第一步,初始化参数列表修改参数
第二步,加载图像,使用当前的参数设置运行工具
1. C#
2.
3. //第一步,设置参数
4. //定义仿射变换工具对象
5. m_stImageAffineTransformToolObj = new CImageAffineTransformTool();
6. //可修改参数
7. byte[] fileBytes = new byte[256];
8. uint nConfigDataSize = 256;
9. uint nConfigDataLen = 0;
10. //保存参数
11. m_stImageAffineTransformToolObj.SaveConfiguration(fileBytes, nConfigDataSize, ref nConfigDataLen);
12. //设置运行参数,输入图像,ROI面积等,运行
13. m_stImageAffineTransformToolObj.BasicParam.Aspect = fAspectValue;
14. m_stImageAffineTransformToolObj.InputImage = m_stInputImage;
15. m_stImageAffineTransformToolObj.ROIShape = cDefaultRect;
16. m_stImageAffineTransformToolObj.Run();
17. //输出结果
18. CMvdImage stOutputImage = m_stImageAffineTransformToolObj.Result.OutputImage;
问题原因
参数设置错误或者缺少参数设置
3.3.12 直线查找:直线查找工具的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:如何进行直线查找
解答
使用直线查找工具进行直线查找,在算子SDK开发中,工具入口为xxxTool,则直线查找的工具入口为CEdgeFindTool,首先定义接口对象,然后在图片上设置待直线查找的ROI区域,最后通过接口函数Run就可以获得直线的相关结果。
1. C#
2. // 创建对象
3. VisionDesigner.EdgeFind.CEdgeFindTool cEdgeFindToolObj = new VisionDesigner.EdgeFind.CEdgeFindTool();
4. // 给定输入图片
5. VisionDesigner.CMvdImage cInputImg = new CMvdImage();
6. cInputImg.InitImage("..\\InputTest.bmp");
7. cEdgeFindToolObj.InputImage = cInputImg;
8. // 设置ROI
9. cEdgeFindToolObj.ROI = new VisionDesigner.CMvdRectangleF(cInputImg.Width / 2, cInputImg.Height / 2, cInputImg.Width / 4, cInputImg.Height / 4);
10. // 运行
11. cEdgeFindToolObj.Run();
12. // 获取结果
13. VisionDesigner.EdgeFind.CEdgeFindResult cEdgeFindRes = cEdgeFindToolObj.Result;
14. Console.WriteLine("The number of edge: {0}", cEdgeFindRes. SingleEdgeInfo.Count);
15. List lcEdgePtInfo = cEdgeFindRes.SingleEdgeInfo;
16. foreach (CEdgeFindSingleEdgeInfo cCurEdgePt in lstEdgePtInfo)
17. {
18. Console.WriteLine("EdgePoint: {0}, Sore={1}", cCurEdgePt.Score);
19. }
问题根因
不熟悉直线查找工具的使用。
3.3.13 缺陷检测:直线边缘缺陷检测工具的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:算子SDK开发直线边缘缺陷检测的使用方法
解答
首先将直线边缘缺陷检测工具实例化,然后设置输入图片并选择ROI区域,最后获取结果,示例代码如下
1. C#
2. VisionDesigner.LineEdgeFlawInsp.CLineEdgeFlawInspTool cLineEdgeFlawInspToolObj = new VisionDesigner.LineEdgeFlawInsp.CLineEdgeFlawInspTool();//工具实例化
3. VisionDesigner.CMvdImage InputImg = new CMvdImage();
4. InputImg.InitImage("InputTest.bmp");//设置输入图片
5. cLineEdgeFlawInspToolObj.InputImage = InputImg;
6. cLineEdgeFlawInspToolObj.ROI = new VisionDesigner.CMvdRectangleF(InputImg.Width / 2, InputImg.Height / 2, InputImg.Width / 4, InputImg.Height / 4);//选择ROI区域;
7. cLineEdgeFlawInspToolObj.Run();//工具执行
8. VisionDesigner.LineEdgeFlawInsp.CLineEdgeFlawInspResult cLineEdgeFlawInspRes = cLineEdgeFlawInspToolObj.Result;//获取结果
9. String message= "缺陷数":+ cLineEdgeFlawInspRes.FlawInfoList.Count.Tostring();
问题根因
不熟悉相关接口的使用。
3.3.14 N点标定:N点标定的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:算子SDK开发N点标定的使用方法
解答
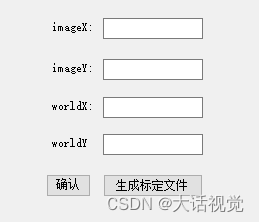
首先记录文本输入的坐标图像点a、b与物理点c、d,最少需要4组点,如图可每输入一组点点击确认,输入点个数大于等于4时,可点击生成标定文件(CalibRun=true),示例代码如下
1. C#
2. VisionDesigner.NPointCalib.CNPointCalibTool cNPointCalibToolObj =new VisionDesigner.NPointCalib.CNPointCalibTool();//工具实例化
3. cNPointCalibToolObj.BasicParam.CameraMode = VisionDesigner.NPointCalib.MVD_CAMERA_MODE.MVD_CAMERA_MODE_MOVE;//基本参数设置
4. MVD_CALIB_POINT_F stCalibPoint = new MVD_CALIB_POINT_F();
5. stCalibPoint.stImageCoordinate.fX = a;
6. stCalibPoint.stImageCoordinate.fY = b;//图像点
7. stCalibPoint.stWorldCoordinate.fX = c;
8. stCalibPoint.stWorldCoordinate.fY = d;//物理点
9. cNPointCalibToolObj.BasicParam.OffsetPointList.Add(stCalibPoint);
10. //至少需要4组点
11. if (cNPointCalibToolObj.BasicParam.OffsetPointList.Count>=4&&CalibRun==true)
12. {
13. cNPointCalibToolObj.Run();//执行
14. VisionDesigner.NPointCalib.CNPointCalibResult cNPointCalibRes = cNPointCalibToolObj.Result;//获取标定结果
15. CalibRun = false;
16. if(cNPointCalibRes.OffsetPointCalibInfo.HomoEstStatus!=0)
17. {
18. cNPointCalibToolObj.ExportCalibFile("E://新建文件夹//calib.iccal");
19. }
20. }
问题根因
不熟悉相关接口的使用。
3.3.15 畸变校正:畸变校正的使用方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:算子SDK开发畸变校正的使用方法
解答
首先将畸变校正工具实例化,然后设置输入图片并选择标定文件,最后获取结果,示例代码如下
1. C#
2. VisionDesigner.ImageCorrectCalib.CImageCorrectCalibTool cImageCorrectCalibToolObj = new VisionDesigner.ImageCorrectCalib.CImageCorrectCalibTool ();
3. VisionDesigner.CMvdImage cInputImg = new CMvdImage();
4. cInputImg.InitImage("InputTest.bmp");
5. cImageCorrectCalibToolObj.InputImage = cInputImg;
6. cImageCorrectCalibToolObj.ImportCalibFile("calib.iccal");//选择标定文件
7. cImageCorrectCalibToolObj.Run();
8. VisionDesigner.ImageCorrectCalib.CImageCorrectCalibResult cImageCorrectCalibRes = cImageCorrectCalibToolObj.Result;
问题根因
不熟悉相关接口的使用。
3.3.16 字符识别:多线程同时读取同一个本地模型的方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:多线程如何调用本地同一个模型。
解答
读取本地模型数据,在经过深拷贝后,使用LoadModelData接口调用模型。
C#
for (int i = 0; i < 3; i++)
{
int temp = i;
Task.Factory.StartNew(new Action<object>(t =>
{
FileStream fs = new FileStream(modelpath, FileMode.Open);
long size = fs.Length;
byte[] array = new byte[size];
fs.Read(array, 0, array.Length);
CNNOCRTool tool = new CNNOCRTool(MVD_ALGORITHM_PLATFORM_TYPE.MVD_ALGORITHM_PLATFORM_CPU);
byte[] ModelArray= new byte[array.Length];
Array.Copy(array, ModelArray, array.Length);
tool.BasicParam.LoadModelData(ModelArray, ModelArray.Length);
//设置图片等参数
tool.Run();}), temp);
}
问题根因
不熟悉多线程同时读取同一个本地模型
3.3.17 字符识别:VM自带字符识别模型的区分
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
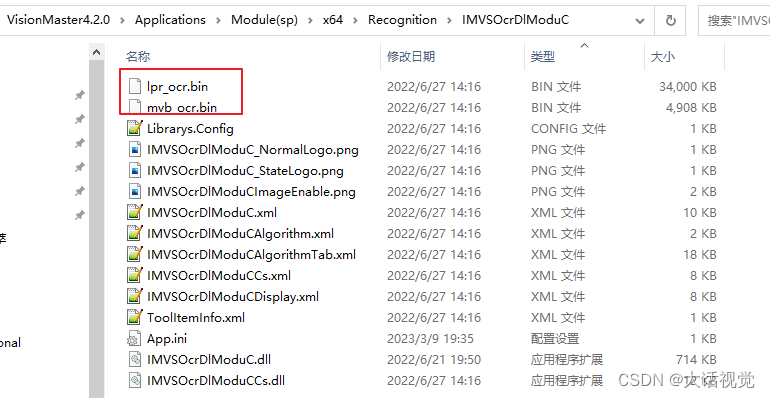
现象:安装VM和深度学习包之后,VM安装路径下的字符识别模块有两个模型:lpr_ocr.bin和mvb_ocr.bin,分别对应哪个算子。
解答
VM安装路径中,字符识别模块中有两个已经训练好的模型:lpr_ocr.bin和mvb_ocr.bin,分别对应训练平台-字符识别的字符模型类型:文本行识别和文本行识别(拓展)。
在VM中,使用字符识别模块,两个模型都可以可以调;
在算子SDK开发中,针对自带的两个模型,字符识别算子调用规则是,CNNOCRTool算子调用模型lpr_ocr.bin,CNNCharRecogTool算子调用mvb_ocr.bin。
问题根因
不熟悉字符识别模型。
3.3.18 设置掩膜:给模块设置掩膜的方法
描述
环境:MVDAlgrithm SDK3.4及以上 + VS2013及以上
现象:如何给模块设置掩膜(针对需要设置多个感兴趣区域及屏蔽区域场景可通过掩膜设置)?
解答
通过掩膜算子CPreproMaskTool获取掩模图像,例如给Blob分析模块设置掩膜示例代码如下;
C#
public void SetBlobMask()
{//实例掩膜工具CPreproMaskTool cPrepromaskTool = new CPreproMaskTool();//创建Shape链表List<Tuple<CMvdShape, bool>> maskList = new List<Tuple<CMvdShape, bool>>();var rect1 = new CMvdRectangleF(rect.CenterX, rect.CenterY, rect.Width - 200, rect.Height - 200);//添加矩形感兴趣区域maskList.Add(new Tuple<CMvdShape, bool>(rect1, false));var poly1 = new CMvdPolygonF();poly1.AddVertex(rect.CenterX - rect.Height / 2, rect.CenterY - rect.Width / 2);poly1.AddVertex(rect.CenterX - rect.Height / 2, rect.CenterY - rect.Width / 2 + 200);poly1.AddVertex(rect.CenterX - rect.Height / 2 + 200, rect.CenterY - rect.Width / 2);//添加多边形感兴趣区域maskList.Add(new Tuple<CMvdShape, bool>(poly1, false));var poly2 = new CMvdPolygonF();poly2.AddVertex(rect.CenterX - rect.Height / 2, rect.CenterY + rect.Width / 2);poly2.AddVertex(rect.CenterX - rect.Height / 2, rect.CenterY + rect.Width / 2 - 200);poly2.AddVertex(rect.CenterX - rect.Height / 2 + 200, rect.CenterY + rect.Width / 2);//添加多边形屏蔽区域maskList.Add(new Tuple<CMvdShape, bool>(poly2, true));//设置掩膜工具参数cPrepromaskTool.InputImage = runImage;cPrepromaskTool.RegionList = maskList;//运行掩膜工具cPrepromaskTool.Run();//实例化Blob分析工具CBlobFindTool blobTool = new VisionDesigner.BlobFind.CBlobFindTool();blobTool.InputImage = runImage;//设置掩膜图像blobTool.RegionImage = cPrepromaskTool.OutputImage;blobTool.SetRunParam("LowThreshold", "60");blobTool.SetRunParam("Polarity", "BrightObject");blobTool.BasicParam.ShowBlobImageStatus = true;//执行Blob算子blobTool.Run();
}
问题根因
不熟悉掩膜工具的使用。
相关文章:
【VM服务管家】VM4.x算子SDK开发_3.3 模块工具类
目录 3.3.1 位置修正:位置修正算子工具的使用方法3.3.2 模板保存:实现模板自动加载的方法3.3.3 模板匹配: 获取模板匹配框和轮廓点的方法3.3.4 模板训练:模板训练执行完成的判断方法3.3.5 图像相减:算子SDK开发图像相减…...
Aspose.Pdf使用教程:在PDF文件中添加水印
Aspose.PDF 是一款高级PDF处理API,可以在跨平台应用程序中轻松生成,修改,转换,呈现,保护和打印文档。无需使用Adobe Acrobat。此外,API提供压缩选项,表创建和处理,图形和图像功能&am…...
H.264/AVC加密----选择加密
文献学习: 《Data Hiding in Encrypted H.264/AVC Video Streams by Codeword Substitution》 期刊:IEEE TRANSACTIONS ON INFORMATION FORENSICS AND SECURITY 简介 通过分析H.264/AVC编解码器的特性,提出了三个敏感部分(IPM、MVD和残差系…...

WuThreat身份安全云-TVD每日漏洞情报-2023-04-26
漏洞名称:Google Android 命令注入漏洞 漏洞级别:高危 漏洞编号:CVE-2023-20964,CNNVD-202303-538 相关涉及:None 漏洞状态:POC 参考链接:https://tvd.wuthreat.com/#/listDetail?TVD_IDTVD-2023-05794 漏洞名称:OpenSSL RSA 解密时间差异 漏洞级别:中危 漏洞编号:CVE-2022-4…...

剑指 Offer第二版:1~n 整数中 1 出现的次数、51. 数组中的逆序对、56 - II. 数组中数字出现的次数 II
剑指 Offer第二版 43. 1~n 整数中 1 出现的次数51. 数组中的逆序对56 - II. 数组中数字出现的次数 II 43. 1~n 整数中 1 出现的次数 题目:输入一个整数 n ,求1~n这n个整数的十进制表示中1出现的次数。 例如,…...
云原生-k8s核心概念(pod,deploy,service,ingress,configmap,volume)
Gitee-k8s学习 云原生实战-kubernetes核心实战 namespace Namespace是kubernetes系统中的一种非常重要资源,它的主要作用是用来实现多套环境的资源隔离或者多租户的资源隔离 Pod Pod可以认为是容器的封装,一个Pod中可以存在一个或者多个容器。 De…...

他工作10年,老板却让他走人
大家好,我是五月,一个编程街溜子。 二狗被裁了,他在公司待了快十年,他想留下来,老板却让他走。 我和他一样困惑。 他985毕业,工作中有从0开始一个项目直到日活过千万,也有过参与顶级产品核心…...

vpp怎么写node
VPP(Vector Packet Processing)是一个高性能的数据平面开源项目,用于构建网络功能虚拟化(NFV)和软件定义网络(SDN)解决方案。它由Cisco开发,并在Apache 2.0许可下发布。 在VPP中&am…...
【4. ROS的主要通讯方式:Topic话题与Message消息】
【4. ROS的主要通讯方式:Topic话题与Message消息】 1. 前言1.1 王者解释结点通讯:1.2 通讯小结 2. 灵活的Topic话题图解2.1 话题注意细节2.2 外延补充 3. Message消息图解3.1 消息类型3.2 查看标准消息类型std_msgs 4. 使用C实现Publisher发布者4.1 发布…...

【react全家桶学习】react中组件定义及state属性(超详/必看)
函数式组件定义及特点 定义(核心就是一个函数,返回虚拟dom): import React from reactexport default function index() {return <div>index</div> }特点: 1、适用于【简单组件】的定义2、是一个函数&a…...

如何以产品经理思维打造一所高品质学校?
学校的建设与管理真不是一件容易事。2023年03月17日,山东菏泽市曹县一家长投诉某中学课业繁重,孩子经常写作业到半夜;2023年4月4日,张先生在华龙网重庆网络问政平台投诉万州区某中学伙食差,指出“发灰的洋葱࿰…...

根治Spring中使用Mongo时报错InvalidMongoDbApiUsageException
文章目录 And Or迷惑原因 告别InvalidMongoDbApiUsageException问题简单解决根本解决修改源码 代码(省流,可以直接看这里) And Or 很多时候都需要进行逻辑的与或操作,但是spring当中自带的操作并不好用,于是做了相关的改进&#…...
【计算机组成原理】数据的表示和运算·进位计数制
🚩 本文已收录至专栏:计算机基础 我们可以通过显示屏看到各种形式的数据信息,但数据是如何在计算机中表示呢?运算器又是如何实现数据的算数、逻辑运算? 十进制数是最适合我们日常使用的一种计数方式,除此之…...
)
C++ Primer第五版_第十四章习题答案(21~30)
文章目录 练习14.21练习14.22头文件CPP文件 练习14.23头文件CPP文件 练习14.24头文件CPP文件 练习14.25练习14.26练习14.27练习14.28练习14.29练习14.30 练习14.21 编写 Sales_data 类的 和 运算符,使得 执行实际的加法操作而 调用。相比14.3节和14.4节对这两个运…...

服务器性能调优
硬件 如果是硬件瓶颈就换硬件 (包括CPU、内存、网卡) 软件 如果是方案架构设计有问题就换方案,比如mysql、redis方案有问题 建议先 top 看下软件瓶颈在哪,CPU、内存、网络(netstat),哪个进程占…...
带你深入学习k8s--(三) pod 管理
目录 一、简介 1、什么是pod 2、为什么要有pod 二、pod的分类 0、pod常用命令命令 1、准备镜像 2、自主式pod 3、控制器创建pod 4、扩容pod数量 5、通过service暴露pod(负载均衡,自动发起) 6、更新应用版本 三、编写yaml文件 四、Pod生命周期…...

前端系列11集-ES6 知识总结
ES Module 优点 静态分析 浏览器和 Node 都支持 浏览器的新 API 能用模块格式提供 不再需要对象作为命名空间 export 用于规定模块的对外接口 输出的接口与其对应的值是动态绑定关系可以取到模块内部实时的值 import 用于输入其他模块提供的功能 具有提升效果,会提升…...

连接分析工具箱 | 利用CATO进行结构和功能连接重建
导读 本研究描述了一个连接分析工具箱(CATO),用于基于扩散加权成像(DWI)和静息态功能磁共振成像(rs-fMRI)数据来重建大脑结构和功能连接。CATO是一个多模态软件包,使研究人员能够运行从MRI数据到结构和功能连接组图的端到端重建,定制其分析并…...

【目标检测论文阅读笔记】Detection of plane in remote sensing images using super-resolution
Abstract 由于大量的小目标、实例级噪声和云遮挡等因素,遥感图像的目标检测精度低,漏检率或误检率高。本文提出了一种新的基于SRGAN和YOLOV3的目标检测模型,称为SR-YOLO。解决了SRGAN网络 对超参数的敏感性和模态崩溃问题。同时,Y…...

外卖app开发流程全解析
外卖app开发是现代餐饮业的一个必备部分。在这个数字化时代,人们更愿意使用手机应用程序来订购食品。因此,为了满足客户需求,餐饮企业需要开发自己的外卖app。 第一步:确定目标受众 在开始外卖app的开发之前,需要确定…...

精准识别胡椒成熟度!YOLO-AVCA-CBAMNet 让智慧农业更高效
点击蓝字 关注我们 关注并星标 从此不迷路 计算机视觉研究院 公众号ID|计算机视觉研究院 学习群|扫码在主页获取加入方式 https://pmc.ncbi.nlm.nih.gov/articles/PMC12830288/ 计算机视觉研究院专栏 Column of Computer Vision Institute 本文提出YOLO-…...

思源宋体TTF实战秘籍:三步搞定专业中文字体配置
思源宋体TTF实战秘籍:三步搞定专业中文字体配置 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为商业项目寻找合适的中文字体而烦恼吗?Source Han Serif C…...

3分钟掌握MPC Video Renderer:免费开启Windows高清视频播放新体验
3分钟掌握MPC Video Renderer:免费开启Windows高清视频播放新体验 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer 你是否厌倦了Windows系统上平淡无奇的视频播放效…...

委外加工成本智能核算与利润分析方案:基于LLM+超自动化的端到端实践
在2026年的工业数字化语境下,委外加工不再仅仅是生产能力的延伸,而是企业利润控制的核心环节。随着全球供应链的碎片化,委外成本的精细化核算已成为财务数字化转型的“深水区”。传统模式下,数据孤岛、BOM(物料清单&am…...

电机PID调参总翻车?试试VOFA+这个“示波器”功能,实时对比目标与实际值
电机PID调参实战:用VOFA实现波形可视化诊断 调试电机PID控制器时,最令人头疼的莫过于面对一堆抽象数据却无法直观理解系统行为。传统方法依赖串口打印数值或简单示波器观察,往往需要反复修改参数、重新烧录程序,效率低下且容易错过…...
)
别再只用差速轮了!手把手教你为Navigation2仿真打造专属阿克曼底盘模型(附完整URDF/SDF文件)
从差速轮到阿克曼:打造高仿真Navigation2底盘模型的完整指南 在机器人仿真领域,差速轮底盘因其简单可靠而广受欢迎,但真实世界的车辆大多采用阿克曼转向机制。本文将带您深入理解两种模型的本质差异,并手把手指导如何从零构建或改…...

Configor 自动重载功能深度解析:实现配置热更新的终极指南
Configor 自动重载功能深度解析:实现配置热更新的终极指南 【免费下载链接】configor Golang Configuration tool that support YAML, JSON, TOML, Shell Environment 项目地址: https://gitcode.com/gh_mirrors/co/configor Configor 是 Golang 生态系统中一…...

别再用理想模型了!用TINA-TI仿真μA741驱动容性负载,实测振铃现象与消除方案
别再用理想模型了!用TINA-TI仿真μA741驱动容性负载,实测振铃现象与消除方案 在模拟电路设计中,运放驱动容性负载时的稳定性问题堪称工程师的"头号公敌"。许多初学者在仿真阶段使用理想模型验证电路功能时一切正常,却在…...

AzurLaneAutoScript:解放双手的碧蓝航线智能自动化脚本
AzurLaneAutoScript:解放双手的碧蓝航线智能自动化脚本 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为《…...

告别显示器!用VNC Viewer远程玩转树莓派4B的完整配置指南
无显示器玩转树莓派4B:VNC远程配置全攻略 当你刚拿到树莓派4B时,第一反应可能是找显示器、键盘鼠标来配置它。但现实情况往往是:手边没有多余的显示设备,或者你希望将树莓派作为服务器长期运行,根本不需要连接显示器。…...