zed2i相机中imu内参的标定及外参标定
zed2i中imu内参的标定
参考:
https://blog.csdn.net/weixin_42681311/article/details/126109617
https://blog.csdn.net/weixin_43135184/article/details/123444090
值得注意,imu内参的标定其实不是那么重要,大致上给一个值应该影响不大,比如下面是官方给的参数imu-params.yaml,直接拿来用应该也影响不大:
#Accelerometers
accelerometer_noise_density: 1.4e-03 #Noise density (continuous-time)
accelerometer_random_walk: 8.0e-05 #Bias random walk#Gyroscopes
gyroscope_noise_density: 8.6e-05 #Noise density (continuous-time)
gyroscope_random_walk: 2.2e-06 #Bias random walkrostopic: /zed2i/zed_node/imu/data_raw #the IMU ROS topic
update_rate: 400.0 #Hz (for discretization of the values above)
值得注意的是,zed2i提供的imu话题有两个,一个是/zed2i/zed_node/imu/data,一个是zed2i/zed_node/imu/data_raw,前者应该是在后者基础上做了一定的滤波处理,我后面采用了前者。
如果自行标定,可以采用imu_utils,项目链接。安装时要先下载code_utils在workspace中,并且先catkin_make完,然后再放入imu_utils,再次catkin_make。
1. 录制
找个地方放置相机,保持静止,录制2个多小时。
source ~/桌面/zed/ros/catkin_ws/devel/setup.bash
roslaunch zed_wrapper zed2i.launch
rosbag record -O /zed2i/zed_node/imu/data /zed2i/zed_node/imu/data
2. 标定
在~/桌面/liweidong/imu_utils_ws/src/imu_utils-master/launch下创建文件zed2i.launch,内容如下:
<launch><node pkg="imu_utils" type="imu_an" name="imu_an" output="screen"><param name="imu_topic" type="string" value= "/zed2i/zed_node/imu/data"/><param name="imu_name" type="string" value= "zed2i"/><param name="data_save_path" type="string" value= "$(find imu_utils)/data/zed2i/"/><param name="max_time_min" type="int" value= "120"/><param name="max_cluster" type="int" value= "100"/></node></launch>
其中,需要注意max_time_min是要标定的时间长度(分钟),应当与录制的bag的时间长度一致,或者短一点,切不可比录制时间还长,不然标定会一直卡住。接下来进行标定:
source ~/桌面/liweidong/imu_utils_ws/devel/setup.bash
roslaunch imu_utils zed2i.launch
rosbag play -r 200 xxx.bag
这里将bag的播放速度加速为200倍。最后得到标定结果如下:
%YAML:1.0
---
type: IMU
name: zed2i
Gyr:unit: " rad/s"avg-axis:gyr_n: 1.9907361538269255e-03gyr_w: 3.9258772229758955e-05x-axis:gyr_n: 1.7828571086570984e-03gyr_w: 3.7532900901648101e-05y-axis:gyr_n: 2.3517096252728287e-03gyr_w: 4.4818844873917894e-05z-axis:gyr_n: 1.8376417275508495e-03gyr_w: 3.5424570913710870e-05
Acc:unit: " m/s^2"avg-axis:acc_n: 2.1014029979335751e-02acc_w: 4.5856543488109373e-04x-axis:acc_n: 2.1554014733711498e-02acc_w: 3.7798512464262918e-04y-axis:acc_n: 2.0157270328875061e-02acc_w: 5.3636489912956887e-04z-axis:acc_n: 2.1330804875420693e-02acc_w: 4.6134628087108308e-04
用得到的数据替换最上边官方给的结果imu_params.yaml
#Accelerometers
accelerometer_noise_density: 2.1014029979335751e-02 #Noise density (continuous-time)
accelerometer_random_walk: 4.5856543488109373e-04 #Bias random walk#Gyroscopes
gyroscope_noise_density: 1.9907361538269255e-03 #Noise density (continuous-time)
gyroscope_random_walk: 3.9258772229758955e-05 #Bias random walkrostopic: /zed2i/zed_node/imu/data #the IMU ROS topic
update_rate: 400.0 #Hz (for discretization of the values above)
标定zed2i中cam-imu之间的外参
将相机标定时录制的bag,相机标定得到的结果camchain.yaml、标定板参数文件aprilgrid.yaml和imu标定得到的结果imu-params.yaml放在同个目录下。
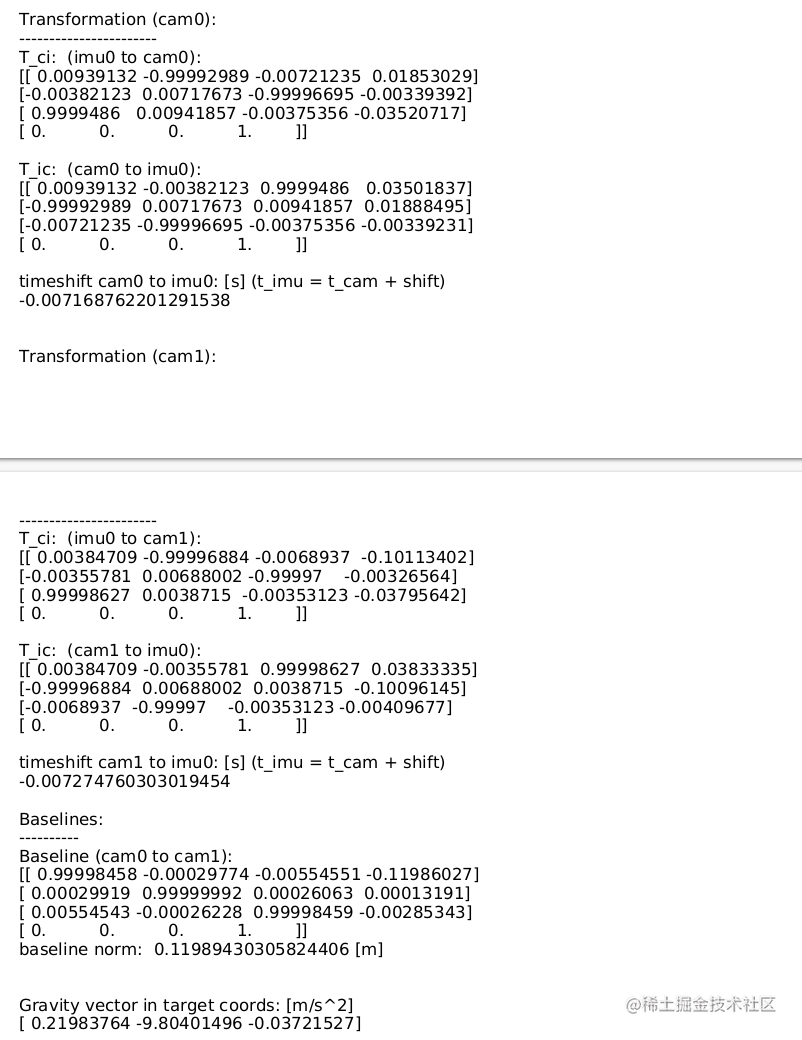
执行以下命令对外参进行标定:
rosrun kalibr kalibr_calibrate_imu_camera --bag xxx.bag --cam camchain.yaml --imu imu-params.yaml --target aprilgrid.yaml
需要等几分钟,然后就会得到标定结果
相关文章:
zed2i相机中imu内参的标定及外参标定
zed2i中imu内参的标定 参考: https://blog.csdn.net/weixin_42681311/article/details/126109617 https://blog.csdn.net/weixin_43135184/article/details/123444090 值得注意,imu内参的标定其实不是那么重要,大致上给一个值应该影响不大…...

Java中的JUnit是什么?如何使用JUnit进行单元测试
JUnit是Java中最流行的单元测试框架之一。它可以帮助开发人员在代码编写过程中检测出错误和异常,从而提高代码的质量和可靠性。 什么是JUnit? JUnit是一个由Kent Beck和Erich Gamma创建的开源Java单元测试框架,它已经成为Java开发中最常用的…...
【seata的部署和集成】
seata的部署和集成 seata的部署和集成一、部署Seata的tc-server1.下载2.解压3.修改配置4.在nacos添加配置5.创建数据库表6.启动TC服务 二、微服务集成seata1.引入依赖2.修改配置文件 三、TC服务的高可用和异地容灾1.模拟异地容灾的TC集群2.将事务组映射配置到nacos3.微服务读取…...
uniapp学习日记之request自定义请求头
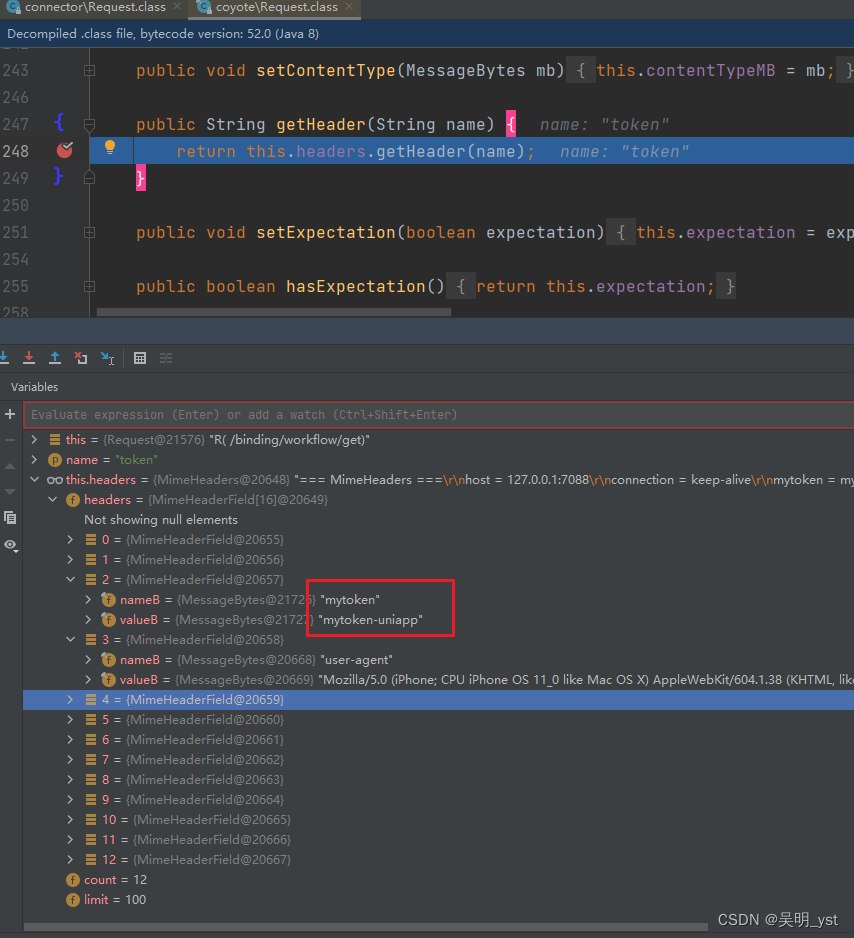
uniapp学习日记之request自定义请求头 在学习uniapp的过程中,由于笔者是从Vue项目转来学习uniapp,在使用uni.request时,发现在浏览器调试时,无法在请求头header中添加token字段,愤而弃之,便开始使用axios组…...

【Rust】速度入门---打印个螃蟹先
参考: 菜鸟教程 1 输出到命令行 这不得打印个螃蟹 // 代码来自官方入门教程 // ferris_say需要另外安装 use ferris_says::say; use std::io::{stdout, BufWriter};fn main() {let stdout: std::io::Stdout stdout();let msg: String String::from("Hello fellow Rusta…...
《Linux 内核设计与实现》12. 内存管理
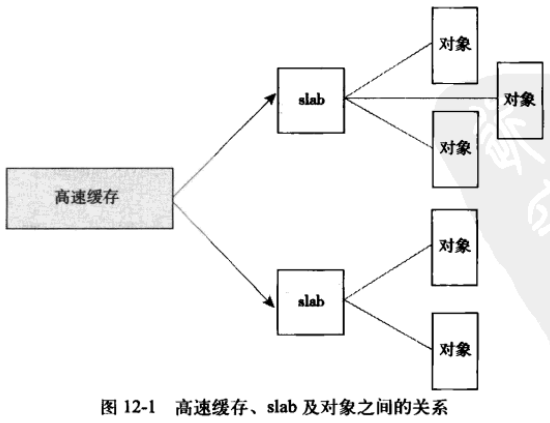
文章目录 页区获得页获得填充为 0 的页释放页 kmalloc()gfp_mask 标志kfree()vmalloc() slab 层slab 层的设计slab 分配器的接口 在栈上的静态分配单页内核栈 高端内存的映射永久映射临时映射 每个 CPU 的分配新的每个 CPU 接口 页 struct page 结构表示系统中的物理页&#x…...

公司新来个卷王,让人崩溃...
最近内卷严重,各种跳槽裁员,相信很多小伙伴也在准备今年的面试计划。 在此展示一套学习笔记 / 面试手册,年后跳槽的朋友可以好好刷一刷,还是挺有必要的,它几乎涵盖了所有的软件测试技术栈,非常珍贵&#x…...
Docker 安全及日志管理
Docker 安全及日志管理 Docker 容器与虚拟机的区别隔离与共享性能与损耗 Docker 存在的安全问题Docker 自身漏洞Docker 源码问题Docker 架构缺陷与安全机制Docker 安全基线标准 容器相关的常用安全配置方法容器最小化Docker 远程 API 访问控制重启 Docker在宿主机的 firewalld …...

大厂面试必备 - MAC 地址 和 IP 地址分别有什么作用?
数据链路层 1、MAC 地址 和 IP 地址分别有什么作用? MAC 地址是数据链路层和物理层使用的地址,是写在网卡上的物理地址。MAC 地址用来定义网络设备的位置。IP 地址是网络层和以上各层使用的地址,是一种逻辑地址。IP 地址用来区别网络上的计…...

【sqlite】联查Join更新
系列文章 C#底层库–MySQLBuilder脚本构建类(select、insert、update、in、带条件的SQL自动生成) 本文链接:https://blog.csdn.net/youcheng_ge/article/details/129179216 C#底层库–MySQL数据库操作辅助类(推荐阅读࿰…...
asp.net+C#德育课程分数统计管理系统
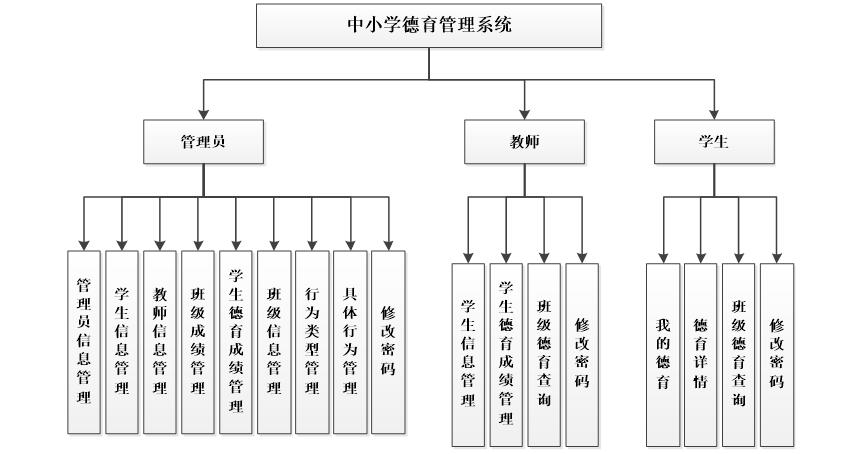
本中小学德育管理系统主要学校内部提供服务,系统分为管理员,教师和学生3个大模块。 本研究课题重点主要包括了下面几大模块:用户登录,管理员信息管理学生信息管理,教师信息管理,班级成绩管理,学…...

Figma中文网?比Figma更懂你的设计网站!
一个比 Figma 更懂你的设计网站的 Figma 中文网 —— 即时设计是一个非常有用的设计资源平台,它提供了大量的免费设计素材,包括来自各大厂商的 UI 组件库、精美的模板、插画设计和矢量图标素材等等。设计师可以从中学习到大师的设计技巧和规范࿰…...
Nacos-01-Nacos基本介绍
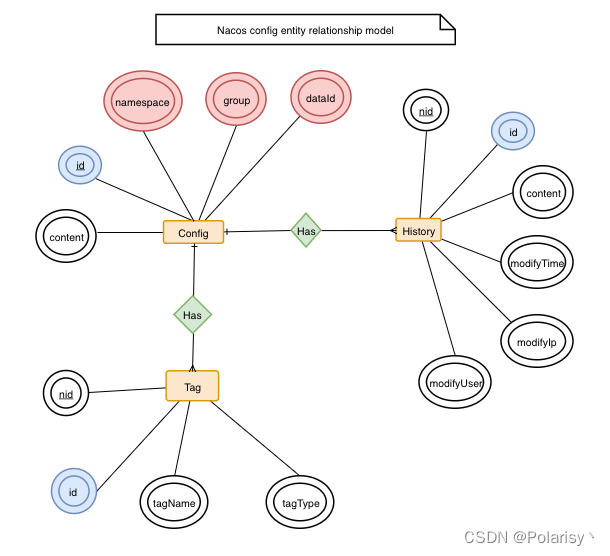
背景 服务发现是⼀个古老的话题,当应用开始脱离单机运行和访问时,服务发现就诞生了。目前的网络架构是每个主机都有⼀个独立的 IP 地址,那么服务发现基本上都是通过某种方式获取到服务所部署的 IP 地址。DNS 协议是最早将⼀个网络名称翻译…...
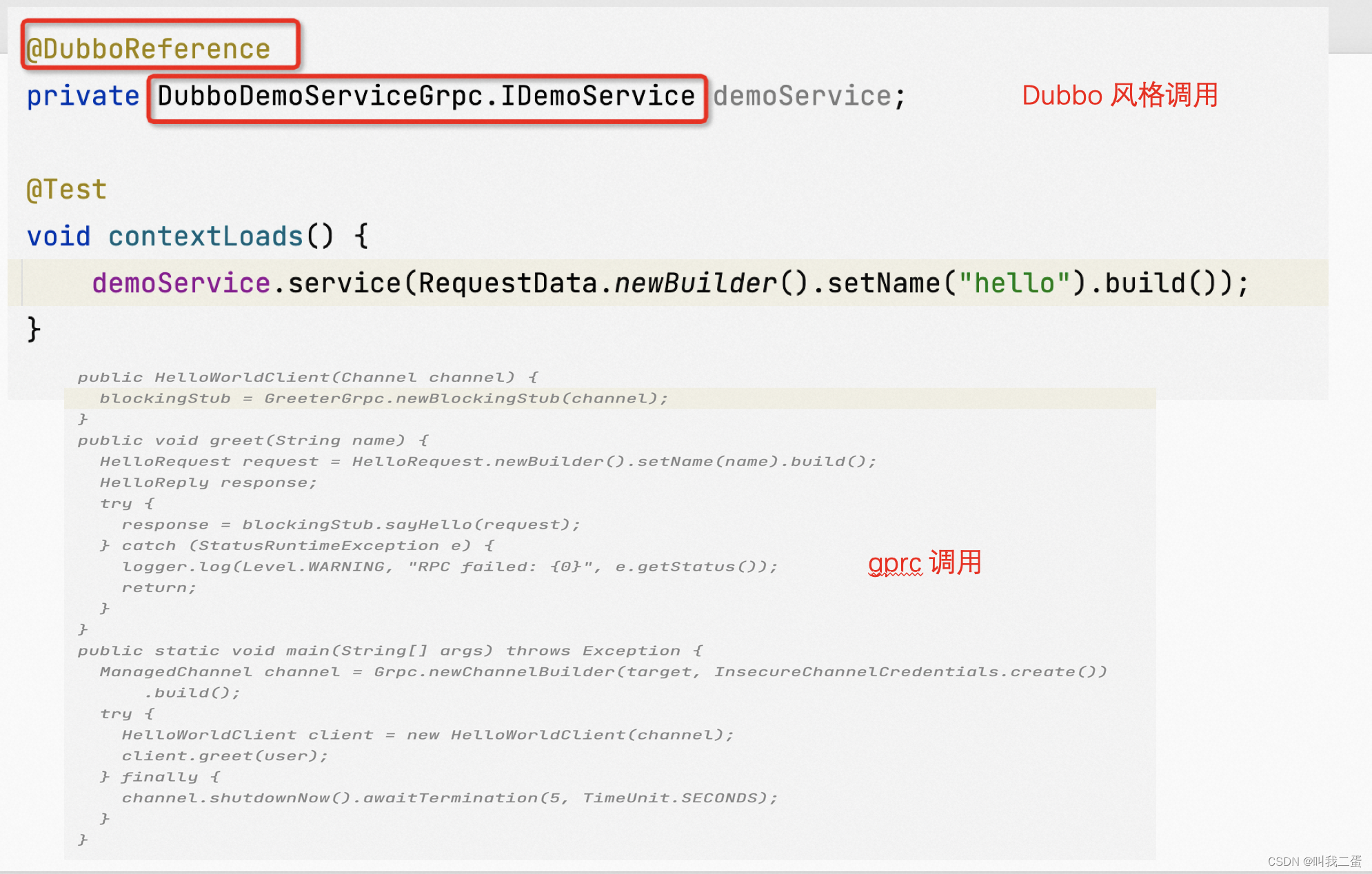
SpringBoot集成Dubbo启用gRPC协议
文章目录 前言项目结构代码示例父工程api moduleservice module 注意事项区别 本文记录下SpringBoot集成Dubbo启用gRPC协议,以及与原生 gRPC 在代码编写过程中的区别。 下面还有投票,帮忙投个票👍 前言 Dubbo 在 2.7.5 版本开始支持原生 gRP…...

Kali HTTrack演示-渗透测试察打一体(1)
HTTrack是一个免费并易于使用的线下浏览器工具,全称是HTTrack Website Copier for Windows,它能够让你从互联网上下载指定的网站进行线下浏览(离线浏览),也可以用来收集信息(甚至有网站使用隐藏的密码文件),一些仿真度极高的伪网站(为了骗取用户密码),也是使用类似工具做…...

ThreeJS进阶之使用后期处理
什么是后期处理? 很多three.js应用程序是直接将三维物体渲染到屏幕上的。 有时,你或许希望应用一个或多个图形效果,例如景深、发光、胶片微粒或是各种类型的抗锯齿。 后期处理是一种被广泛使用、用于来实现这些效果的方式。 首先,场景被渲染到一个渲染目标上,渲染目标表示…...
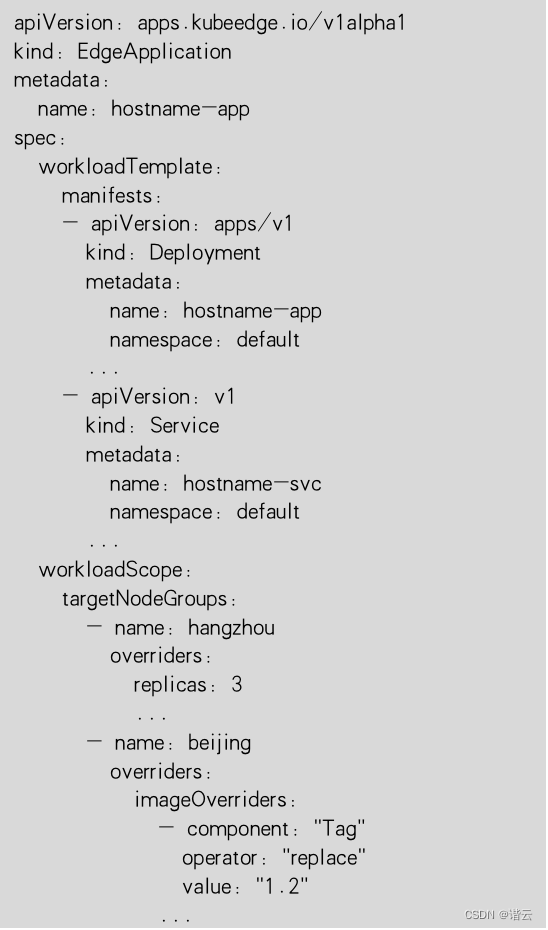
KubeEdge节点分组特性简介
01 边缘应用跨地域部署场景及问题 应用生命周期管理复杂导致运维成本提高 02 边缘节点分组管理 节点分组:将不同地区的边缘节点按照节点组的形式组织 边缘应用:将应用资源整体打包并满足不同节点组之间的差异化部署需求 流量闭环:将服务流量…...

论文笔记_2018_IEEE Access_评估地图用于车辆定位能力的因素
目录 基本情况 摘要 I. 引言 II. 相关工作 III. 地图评估标准的定义 A.地图的特...

YOLOv8 人体姿态估计(关键点检测) python推理 ONNX RUNTIME C++部署
目录 1、下载权重 2、python 推理 3、转ONNX格式 4、ONNX RUNTIME C 部署 1、下载权重 我这里之前在做实例分割的时候,项目已经下载到本地,环境也安装好了,只需要下载pose的权重就可以 2、python 推理 yolo taskpose modepredict model…...

AgilePLM 通用自动赋值程序 安装使用说明
功能概述 首先,简单介绍一下自动赋值的意思。就是程序根据给定的条件,给某一个数据对象的某个字段自动填值。 类似功能单独定制开发写程序也能实现。通用赋值程序只是赋值规则简化到了配置文件中。后续如果赋值规则变更,只需要修改配置文件…...

DeepSeek代码质量评估实战手册:7步完成从混沌到可度量的质变跃迁
更多请点击: https://kaifayun.com 第一章:DeepSeek代码质量评估的底层逻辑与核心价值 DeepSeek代码质量评估并非简单地统计行数或检测语法错误,而是基于多维语义理解构建的推理系统。其底层逻辑融合了静态分析、符号执行与大语言模型生成式…...

Taotoken的TokenPlan套餐如何实现更经济的模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的TokenPlan套餐如何实现更经济的模型调用 1. 理解TokenPlan的计费模式 在模型应用开发过程中,成本的可预测性…...

零基础轻松拿捏!魔珐星云青少年健康运动教学数字人搭建全流程指南
大家好!本次给大家分享一款面向青少年体育教育的AI创意实践项目——青少年健康运动教学智能数字交互系统。本项目聚焦青少年体质健康痛点,围绕体育教学智能化升级需求,打造集健康知识教学、运动动作陪练、健康知识考核、运动能力评测于一体的…...

番茄小说下载器终极指南:三步构建你的离线阅读自由王国
番茄小说下载器终极指南:三步构建你的离线阅读自由王国 【免费下载链接】Tomato-Novel-Downloader 番茄小说下载器不精简版 项目地址: https://gitcode.com/gh_mirrors/to/Tomato-Novel-Downloader 你是否曾在地铁里读到精彩章节时突然断网?是否在…...

新手村任务:成为一个架构师需要哪些装备?
新手村任务:成为一个架构师需要哪些装备? 一、前言 如果你刚入行不久,想成为一名架构师,那这篇文章就是为你写的。 我们把成为架构师比作一个RPG游戏,你是主角,需要收集各种装备、刷经验、升级技能。 新手村的第一个任务就是:了解你需要哪些装备。 二、架构师技能树…...

基于Netburner NANO54415构建工业级嵌入式Web服务器:从硬件选型到广域监控实战
1. 项目概述:一个为广域与本地监控而生的嵌入式Web服务器如果你正在寻找一个能部署在野外、工厂角落或者任何需要远程数据采集与控制场景下的嵌入式Web服务器方案,并且对市面上那些要么性能孱弱、要么开发门槛极高的开发板感到厌倦,那么这个基…...

氘可来昔替尼常见副作用为鼻咽炎头痛及腹泻,如何应对?
任何口服药物的临床价值,都必须在疗效与安全性的天平上找到精准的平衡点。氘可来昔替尼以PASI 75应答率的全面胜出证明了自己在银屑病治疗中的卓越地位,而其不良反应谱同样经过了严苛的临床验证。鼻咽炎、头痛和腹泻构成了这款药物最需关注的三大安全信号…...

Android Root检测绕过:从逆向分析到Frida分层Hook实战
1. 这不是“绕过root检测”,而是理解检测逻辑后的精准干预在安卓逆向工程的实际工作中,“过root检测”这个说法本身就容易引发误解——它听起来像某种黑箱魔法,仿佛只要套用某个脚本、加载某个插件,就能让App对设备状态“视而不见…...

别再手动维护接口文档了!用Spring Boot 3和Swagger 3实现代码与文档的自动同步
Spring Boot 3与Swagger 3:构建零维护成本的API文档工作流 每次接口变更都要手动更新文档?团队成员总是抱怨文档与实际接口不一致?在敏捷开发时代,传统文档维护方式已成为拖累工程效率的典型痛点。本文将揭示如何通过Spring Boot …...
)
告别复杂模型:用Python+OpenCV+dlib实现简易驾驶员疲劳监测(附完整代码)
轻量级驾驶员疲劳监测系统:PythonOpenCVdlib实战指南 在长途驾驶或夜间行车时,疲劳是导致交通事故的重要因素之一。传统基于嵌入式设备的疲劳监测系统往往需要专用硬件,增加了开发成本和部署难度。本文将介绍如何利用Python生态中的OpenCV和d…...