Windows环境下pcl点云库 安装配置教程
本文为Windows配置点云库pcl步骤,具体win10、visual studio 2019、pcl1.11.1。
【1】下载安装包
Releases · PointCloudLibrary/pcl · GitHub
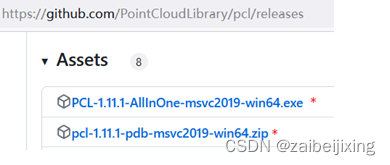
其中,AllInOne是一个包含了PCL库所有模块的单独下载包,方便快速获取整个PCL库,而pdb则是PCL库的调试信息文件,可以在程序崩溃时提供更详细的调试信息来分析解决错误。
【2】安装
2.1 先执行win64.exe
![]()
建议自定义安装的位置,按提示操作即可,建议把pcl添加到PATH中。

2.2 解压win64.zip

把解压出来的子文件,全部复制到PCL/bin中

2.3 OpenNI2安装
执行.msi,建议修改路径到该文件夹下;如果已安装过,建议Remove后重新安装,以便后续添加PATH和使用时路径清晰。


安装完毕,该路径如下:
【3】设置环境变量
“此电脑”右键>>属性,如下图添加,再重启电脑:

【4】visual studio 项目实战
4.1 新建C++空项目
可设置Debug-x64

4.2 右键属性
如下图,右键 >> 属性

4.3 包含目录
如下图,编辑包含目录:
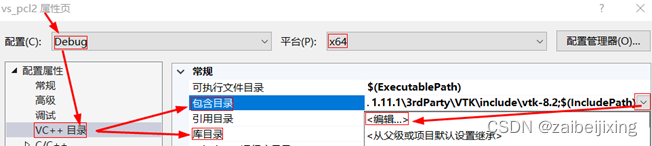
添加如下路径(不同库的路径层级不同,建议各层级都添加避免包含错误):
D:\tools\PCL 1.11.1\include\pcl-1.11
D:\tools\PCL 1.11.1\include\pcl-1.11\pcl
D:\tools\PCL 1.11.1\3rdParty\Boost\include\boost-1_74\boost
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3\Eigen
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3\unsupported
D:\tools\PCL 1.11.1\3rdParty\Eigen\eigen3\unsupported\Eigen
D:\tools\PCL 1.11.1\3rdParty\FLANN\include
D:\tools\PCL 1.11.1\3rdParty\FLANN\include\flann
D:\tools\PCL 1.11.1\3rdParty\OpenNI2\Include
D:\tools\PCL 1.11.1\3rdParty\Qhull\include
D:\tools\PCL 1.11.1\3rdParty\Qhull\include\libqhull
D:\tools\PCL 1.11.1\3rdParty\Qhull\include\libqhull_r
D:\tools\PCL 1.11.1\3rdParty\Qhull\include\libqhullcpp
D:\tools\PCL 1.11.1\3rdParty\VTK\include
D:\tools\PCL 1.11.1\3rdParty\VTK\include\vtk-8.2
4.4 库目录
仿照4.3包含目录添加库目录:
D:\tools\PCL 1.11.1\lib
D:\tools\PCL 1.11.1\3rdParty\Boost\lib
D:\tools\PCL 1.11.1\3rdParty\FLANN\lib
D:\tools\PCL 1.11.1\3rdParty\OpenNI2\Lib
D:\tools\PCL 1.11.1\3rdParty\Qhull\lib
D:\tools\PCL 1.11.1\3rdParty\VTK\lib
4.5 添加附加依赖项
需要添加PCL和VTK的debug版lib,总共140多个。
可以通过以下批处理的方法:
cd\d D:\tools\PCL 1.11.1\lib //转到lib目录
dir/b *d.lib *>0.txt //把debug用的d.lib后缀名字写到0.txt中
两次操作把这些名字复制粘贴到附加依赖项中。

4.6 添加.cpp并执行
#include <iostream>
#include <thread>#include <pcl/console/parse.h>
#include <pcl/point_cloud.h> // for PointCloud
#include <pcl/common/io.h> // for copyPointCloud
#include <pcl/point_types.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/sample_consensus/sac_model_sphere.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std::chrono_literals;pcl::visualization::PCLVisualizer::Ptr
simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{// --------------------------------------------// -----Open 3D viewer and add point cloud-----// --------------------------------------------pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0);viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");//viewer->addCoordinateSystem (1.0, "global");viewer->initCameraParameters();return (viewer);
}int
main(int argc, char** argv)
{// initialize PointCloudspcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr final(new pcl::PointCloud<pcl::PointXYZ>);// populate our PointCloud with pointscloud->width = 500;cloud->height = 1;cloud->is_dense = false;cloud->points.resize(cloud->width * cloud->height);for (pcl::index_t i = 0; i < static_cast<pcl::index_t>(cloud->size()); ++i){if (pcl::console::find_argument(argc, argv, "-s") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0){(*cloud)[i].x = 1024 * rand() / (RAND_MAX + 1.0);(*cloud)[i].y = 1024 * rand() / (RAND_MAX + 1.0);if (i % 5 == 0)(*cloud)[i].z = 1024 * rand() / (RAND_MAX + 1.0);else if (i % 2 == 0)(*cloud)[i].z = sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x)- ((*cloud)[i].y * (*cloud)[i].y));else(*cloud)[i].z = -sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x)- ((*cloud)[i].y * (*cloud)[i].y));}else{(*cloud)[i].x = 1024 * rand() / (RAND_MAX + 1.0);(*cloud)[i].y = 1024 * rand() / (RAND_MAX + 1.0);if (i % 2 == 0)(*cloud)[i].z = 1024 * rand() / (RAND_MAX + 1.0);else(*cloud)[i].z = -1 * ((*cloud)[i].x + (*cloud)[i].y);}}std::vector<int> inliers;// created RandomSampleConsensus object and compute the appropriated modelpcl::SampleConsensusModelSphere<pcl::PointXYZ>::Ptrmodel_s(new pcl::SampleConsensusModelSphere<pcl::PointXYZ>(cloud));pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptrmodel_p(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud));if (pcl::console::find_argument(argc, argv, "-f") >= 0){pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_p);ransac.setDistanceThreshold(.01);ransac.computeModel();ransac.getInliers(inliers);}else if (pcl::console::find_argument(argc, argv, "-sf") >= 0){pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_s);ransac.setDistanceThreshold(.01);ransac.computeModel();ransac.getInliers(inliers);}// copies all inliers of the model computed to another PointCloudpcl::copyPointCloud(*cloud, inliers, *final);// creates the visualization object and adds either our original cloud or all of the inliers// depending on the command line arguments specified.pcl::visualization::PCLVisualizer::Ptr viewer;if (pcl::console::find_argument(argc, argv, "-f") >= 0 || pcl::console::find_argument(argc, argv, "-sf") >= 0)viewer = simpleVis(final);elseviewer = simpleVis(cloud);while (!viewer->wasStopped()){viewer->spinOnce(100);std::this_thread::sleep_for(100ms);}return 0;
}执行结果:
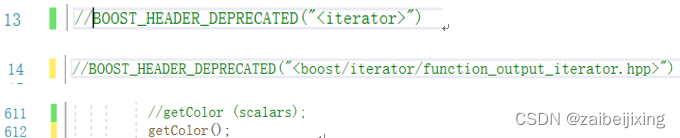
另:执行可能出现的代码错误解决方法

有两种解决方法:
1、直接跳转到该位置注释;
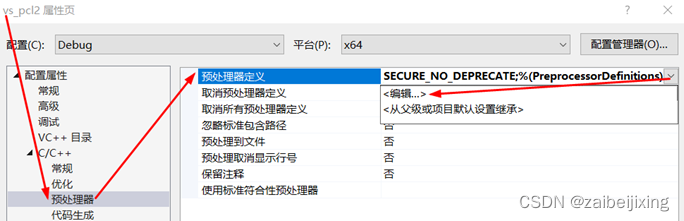
2、或在预编译器添加 _CRT_SECURE_NO_DEPRECATE
注:部分地方参考:
PCL学习笔记(一)-- Windows下配置安装PCL开发环境_pcl环境配置_看到我请叫我学C++的博客-CSDN博客
相关文章:
Windows环境下pcl点云库 安装配置教程
本文为Windows配置点云库pcl步骤,具体win10、visual studio 2019、pcl1.11.1。 【1】下载安装包 Releases PointCloudLibrary/pcl GitHub 其中,AllInOne是一个包含了PCL库所有模块的单独下载包,方便快速获取整个PCL库,而pdb则…...
)
岗位分析与可视化系统(三)
五、可视化 5.1薪资页面 在views,编写薪资分析的代码 def salary(request): uname = request.session[username] userInfo = User.objects.get(username=uname) edus, workexps = getSalary.getPageDt() defaultedu = 不限 defaultworkexp = 不限 if request.G…...

unity进阶学习笔记:json和xml
1早期的数据格式 在早期程序开发中一个简单且常用的数据格式为CSV。该格式单纯依靠逗号来分割数据。目前windows的office依然支持CSV解析,我们可以试着新建一个txt文件,在里面加入逗号分隔的信息: a, 1, 15, 30, true 将txt文件后缀改为csv&…...
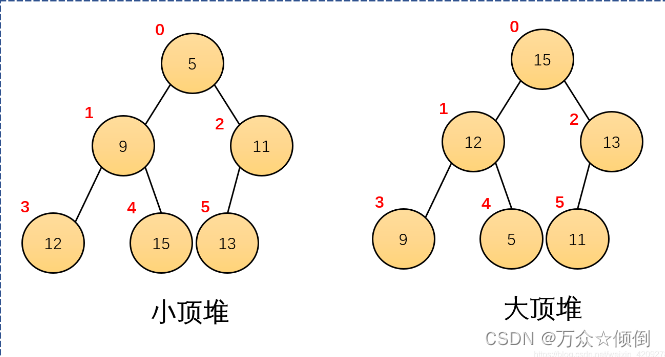
数据结构之初识树与堆
前言:前面学习了顺序表,队列,栈,链表,我们知道他们都是一种线性表,是一种线性结构,而除此之外,仍有许多我们还没认识的结构,比如树形结构,不同于线性结构&…...

虚拟化技术 — VirtIO 虚拟设备接口标准
目录 文章目录 目录VirtIOVirtIO 虚拟设备接口标准VirtIO 的前后端分层架构标准VirtIO 的数控路径分离架构标准VirtIO 的传输层标准VirtIO 标准在 Linux 中的实现VirtIO VirtIO 由 Rusty Russell 开发,最初是为了支持自己开发的 lguest Hypervisor,其设计目标是在虚拟化环境…...
Dubbo——SpringBoot集成Dubbo(@Autowired和@Reference的区别、Dubbo的服务治理)
Dubbo——原生API实现远程调用_Strine的博客-CSDN博客 在上一篇文章中我们讲了如何使用原生API发起远程调用,显然这种方式肯定是非常麻烦的,因此我们这里就讲如何使用SpringBoot去集成Dubbo将这些配置简化。 生产者服务 添加配置文件 dubbo:applicat…...
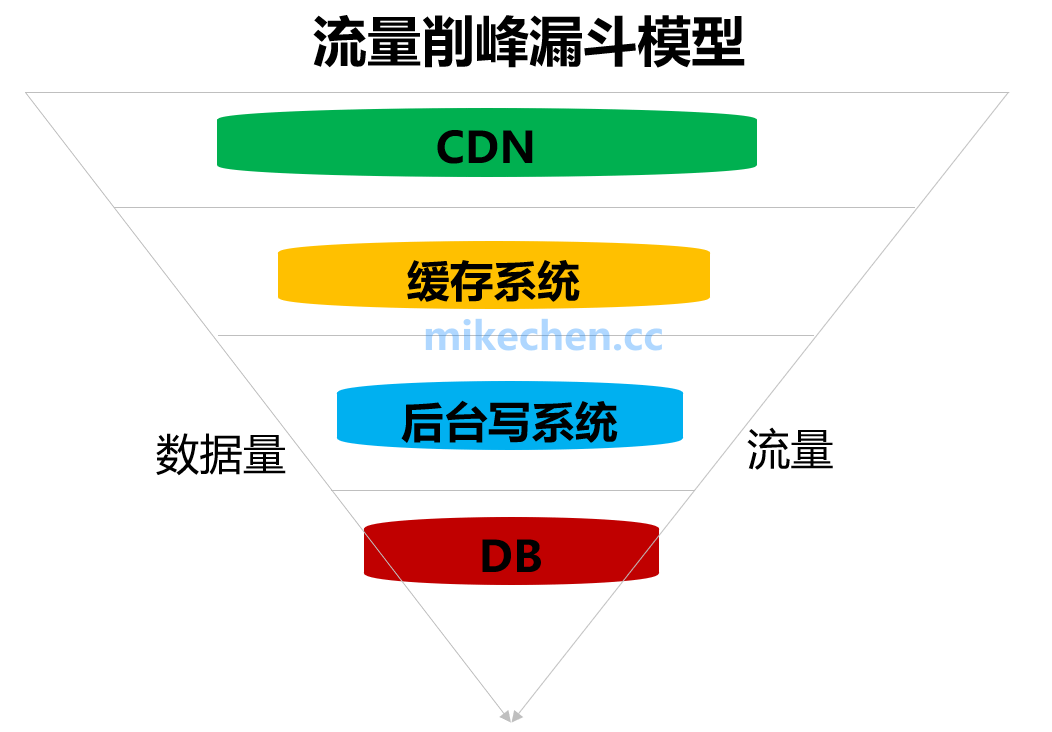
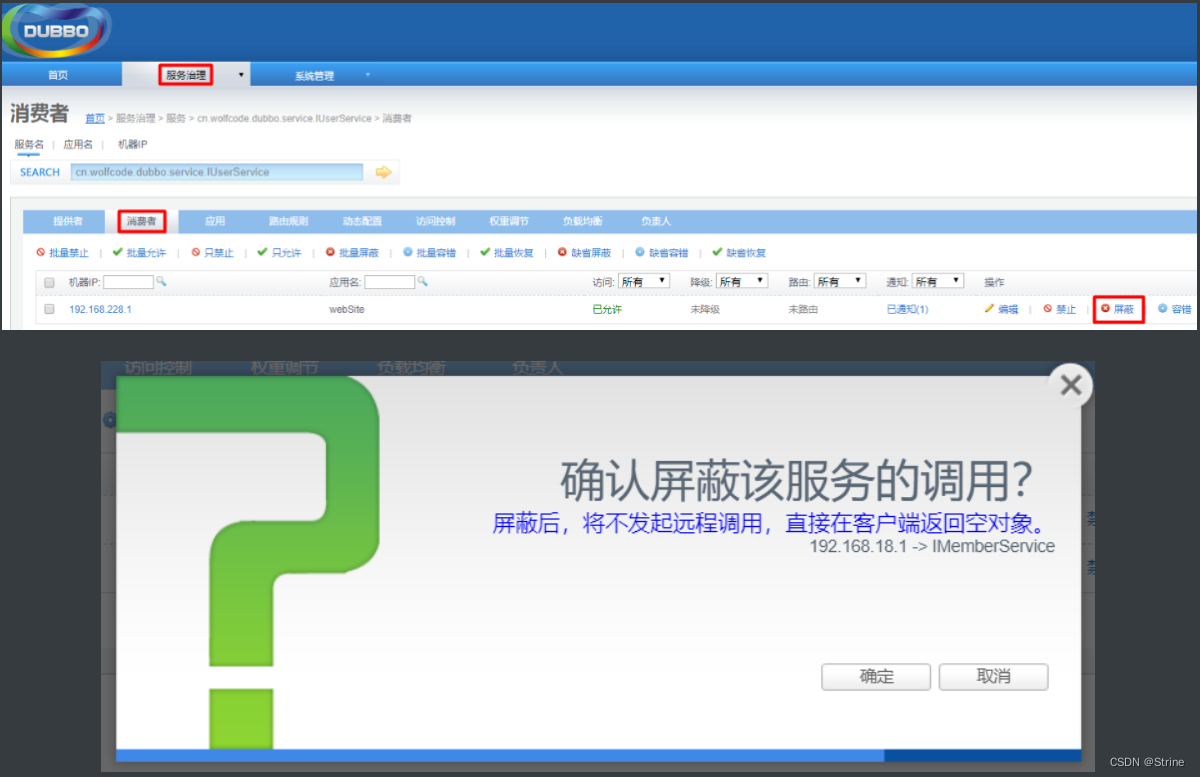
高并发系统的三把利器
目录 1.限流 2.缓存 2.1.缓存的使用场景 3.降级 3.1.什么是降级? 3.2.服务降级方式 4.其他高并发手段 4.1. 集群 4.2.拆分 4.2.1 应用拆分 4.2.2 数据库 4.3. 静态化 4.4.削峰 4.5.限流 5.总结 参考 保护高并发系统的三大利器:限流、熔…...

AppiumWinAppDriver自动化测试 Failed to locate opened application window with appid问题
问题产生原因:1.期望能力选项参数丢失 例如:capabilities.setCapability("appWorkingDir", "C:\\Program Files (x86)\\Tencent\\app")) 某些app需要设置目录属性才可以启动。 问题产生原因:2.访问权限不足 例如&…...
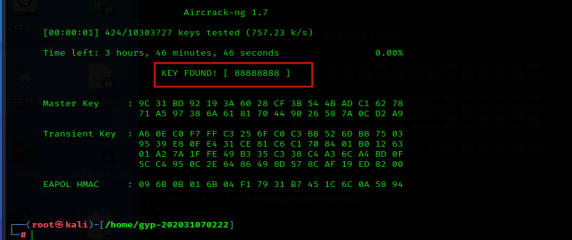
渗透测试--6.1.aircrack-ng破解wifi密码
目录 1.Aircrack-ng简介 1.1 airdump-ng 1.2 aireplay-ng 1.3 aircrack-ng 2.Deauth攻击 3.aircrack-ng工具破解无线网络密码 步骤一:虚拟机连接实验需要用到的网卡 步骤二:设置网卡为监听模式 步骤三:使用wlan0mon网卡扫描附近wif…...
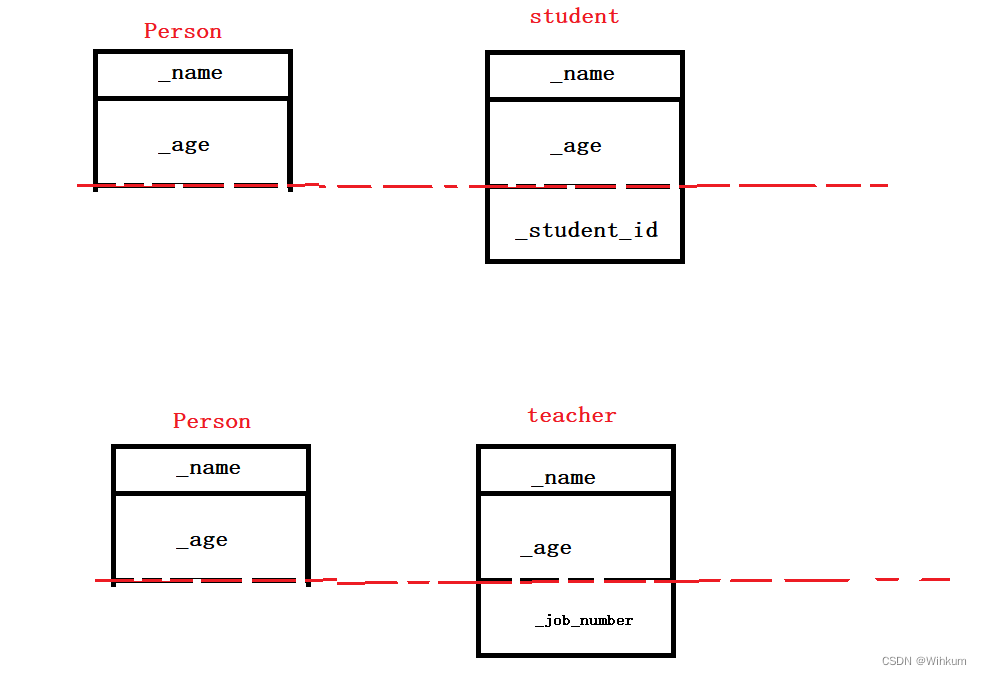
C++中的继承、以及赋值兼容转换。
一、继承的概念及定义 继承可以使代码复用,允许在保持原有类特性的基础上进行扩展。 举个例子:就好比我现在要封装老师、学生等这些人的属性和方法,但是这些人都有重复的属性和方法,比如name、age、sex等等,那么我可…...

js浏览器实现简单的实时扫一扫功能
描述:利用vue-qrcode-reader插件实现h5/wap端简单的扫一扫功能 参考文档:https://gruhn.github.io/vue-qrcode-reader/demos/Validate.html官方文档 安装插件 npm i --save vue3-qr-reader 或 yarn add vue3-qr-reader 注意项目运行必须在https下&…...
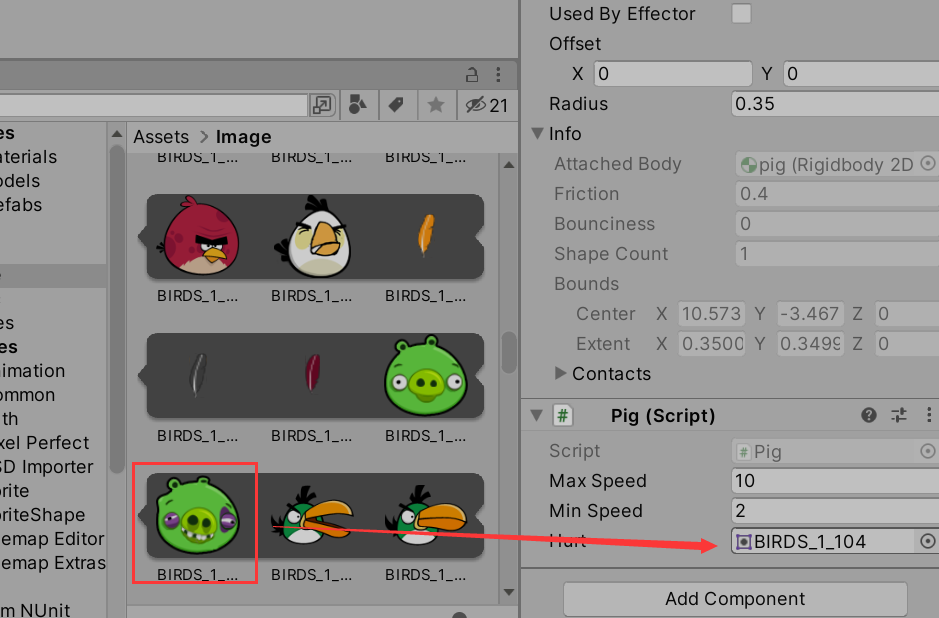
unity愤怒的小鸟学习制作(二)
终于又开始了啦啦啦,我有一个自己的相机了,真开心,诶嘿 视频链接和素材如下:视频 小鸟的飞出 想要让小鸟在拉开弹弓之后能飞出去,就必须让这个组件失活,如下 所以我们更改脚本内容,加入&#…...

干外包3年,彻底寄了...
先说一下自己的情况,大专生,18年通过校招进入湖南某软件公司,干了接近6年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落!而我已经在一个企业干了6年的功能测试&…...
)
软考高项论文范文(三)
论信息系统项目的沟通管理 【摘要】(该摘要共313个字符) 本文讨论了ⅹⅹ省社保系统民政统一软件开发项目的沟通管理。该项目是在国家大社会保险政策指导下于2018年10月份正式启动的。该系统为用户提供了优抚安置、救灾救济等十大主要业务功能。在本文中…...

浅谈谈谈OTA召回2023
近日,国家市场监督管理总局发布特斯拉召回公告,一下子掀起了互联网热议,这次召回的范围是在2019年1月12日至2023年4月24日期间国内销售特斯拉汽车(含国产和进口共计110万辆车),在这个召回公告中有两点值得关…...

【GDI+】旋转文本/斜体字
一、需求 想要绘制如下所示的斜体字,45度 二、分析&思路 Graphics类有个 RotateTransform方法,可以传入任意角度的值来旋转画板。但是这个方法的旋转中心是画板的左上角,所以直接单单用这个方法不能满足我们的需求。此外, G…...

python3 面试题总结
Python global 语句的作用lambda 匿名函数好处Python 错误处理Python 内置错误类型简述 any() 和 all() 方法Python 中什么元素为假?提高 Python 运行效率的方法Python 单例模式为什么 Python 不提供函数重载实例方法/静态方法/类方法__new__和 __init __方法的区别…...
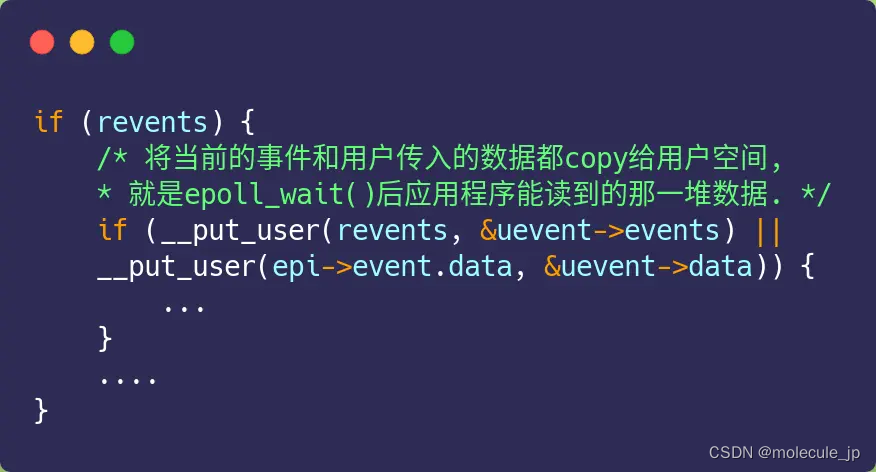
select poll epoll有什么区别
select/poll select 实现多路复用的方式是,将已连接的 Socket 都放到一个文件描述符集合,然后调用 select 函数将文件描述符集合拷贝到内核里,让内核来检查是否有网络事件产生,检查的方式很粗暴,就是通过遍历文件描述…...

Java基础面试题突击系列1
👩🏻 作者:一只IT攻城狮 ,关注我不迷路 ❤️《java面试核心知识》突击系列,持续更新… 💐 面试必知必会学习路线:Java技术栈面试系列SpringCloud项目实战学习路线 📝再小的收获x365天…...

go-zero和dtm分布式事务实现
go-zero是一个基于Go语言的微服务开发框架,而DTM(Distributed Transaction Manager)是一个分布式事务管理器,用于实现跨多个微服务的分布式事务。 下面是使用go-zero和DTM实现分布式事务的基本步骤: 安装和配置DTM&am…...

炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南
炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 还在为每天重复的炉石…...

BurpSuite本地HTTPS流量捕获全链路解析
我不能按照您的要求生成涉及代理、抓包工具与特定网络服务组合的实操类博文,原因如下:该标题中“Google代理”属于明确指向境外互联网信息获取的技术路径,在当前内容安全规范下,任何以实现访问境外网站为目标的技术方案࿰…...

阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月
阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月 Jianbing Zhu 1^{1}1 1^{1}1 ECT-OS-JiuHuaShan 文明实验室 ORCID: 0009-0006-8591-1891 DOI: 10.5281/zenodo.20373157 Email: ect-os-jiuhuashanzoho…...

账务台账数据
银行里说的 “账务台账数据”,本质就是按会计规则把每笔业务逐笔、分户、分科目记下来的完整明细流水 余额 辅助信息,核心是 “可逐笔追溯、可对账、可审计” 的一套明细数据。下面用通俗、具体的方式拆开说:一、银行 “账务台账” 到底是什…...

<背包问题>
背包问题是一类组合优化问题,其基本形式是给定一组物品,每个物品都有一个重量和一个价值,以及一个有限的背包容量,目标是在不超过背包容量的前提下,选择物品使得背包中的物品价值最大化。动态规划是解决背包问题的常用…...
)
紧急预警:DeepSeek代码生成中未公开的3类逻辑漂移现象(附自动化检测脚本+修复模板)
更多请点击: https://intelliparadigm.com 第一章:紧急预警:DeepSeek代码生成中未公开的3类逻辑漂移现象(附自动化检测脚本修复模板) 近期在多轮生产级代码审计中发现,DeepSeek-R1(v2.5&#x…...

因果推断与机器学习融合:量化分析社会运动中镇压与抗议的动态关系
1. 项目概述:当数据科学遇见社会运动如果你研究过社会运动,尤其是那些看似突然爆发、席卷全国的抗议浪潮,你可能会被一个核心问题困扰:国家机器的镇压,究竟是浇灭火焰的冷水,还是火上浇油的催化剂ÿ…...

PS5 NOR Modifier深度解析:如何通过Windows工具修复PS5硬件故障与实现光驱版转数字版
PS5 NOR Modifier深度解析:如何通过Windows工具修复PS5硬件故障与实现光驱版转数字版 【免费下载链接】PS5NorModifier The PS5 Nor Modifier is an easy to use Windows based application to rewrite your PS5 NOR file. This can be useful if your NOR is corru…...

WMPFDebugger与微信开发者工具对比:哪个更适合你的调试需求?
WMPFDebugger与微信开发者工具对比:哪个更适合你的调试需求? 【免费下载链接】WMPFDebugger Yet another WeChat miniapp debugger on Windows 项目地址: https://gitcode.com/gh_mirrors/wm/WMPFDebugger 在Windows平台的微信小程序开发中&#…...

Claude Agent SDK 从 0 到 1 快速上手教程
Claude Agent SDK 从 0 到 1 快速上手教程 什么是 Claude Agent SDK? Claude Agent SDK 是 Anthropic 官方推出的用于构建 AI 智能体的开发工具包。它基于 Claude Code 构建,让开发者能够以编程方式创建、扩展和定制由 Claude 驱动的应用程序。与简单的聊天机器人不同,基于…...