opencv-python相机标定详解
文章目录
- 角点检测
- 查看角点
- 标定
opencv中内置了张正友的棋盘格标定法,通过一些姿态各异的棋盘格图像,就能标定相机的内外参数。
角点检测
第一步是角点检测,首先需要读取棋盘格图像
import numpy as np
import cv2
import ospath = 'imgs' # 图像文件夹;相对路径
fs = os.listdir(path)
grays = []
for f in fs:fName = os.path.join(path, f)img = cv2.imread(fName)gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 图像转灰度grays.append(gray)
其中,grays中便是所有棋盘格灰度图像,接下来,就要找到这些棋盘格的角点位置,主要用到函数findChessboardCorners,其输入参数为棋盘格图像、角点个数以及标志位。
w, h = 11, 8 # 交点横纵个数# 亚像素点的检测条件
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
pImgs = []
for g in grays: # cs即位初步检测的角点ret, cs = cv2.findChessboardCorners(g, (w, h), None) # 亚像素角点检测pImg = cv2.cornerSubPix(g, cs.astype(np.float32), (5, 5), (-1, -1), criteria)pImgs.append(np.squeeze(pImg))
其中,pImg用于存放像素坐标中的二维点。
查看角点
为了验证角点检测是否合理,可以将其画出来,用opencv自带的工具就像下面这样就可以,
cv2.drawChessboardCorners(grays[0], (w, h), pImgs[0], None)
cv2.imshow('findCorners', grays[0])
cv2.waitKey(1000)
但窗口缩放比较麻烦,所以更推荐用经典的matplotlib来画图
import matplotlib.pyplot as pltpts = pImgs[0].squeeze().reshape(-1,2).T
plt.imshow(grays[0])
plt.scatter(pts[0], pts[1], marker='*', c='red')
plt.show()
效果如下

标定
函数calibrateCamera可用于图像标定,只需将现实世界的点和相机坐标系中的角点的一一对应关系输入,便能得到相应的相机矩阵。其中,现实世界中哦的三维点,一般成为对象点,由于棋盘格中每个方块都是等距的,故可直接建立为类似(1,0,0), (2,0,0)...即可
objp = np.zeros((6*7,3), np.float32)
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)pObj = np.zeros((w*h, 3), np.float32)
pObj[:,:2] = np.mgrid[0:w, 0:h].T.reshape(-1,2)
pObjs = [pObj for _ in range(len(pImgs))]
至此,万事俱备,只需调用
size = grays[0].shape[::-1] # 图像尺寸
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(pObjs, pImgs, size, None, None)
其中,rec为成功标志,为True时表示标定成功。
mtx为内参矩阵,差不多是
[ f x 0 c x 0 f y c y 0 0 1 ] = [ 5572.47 0 1314.18 0 5573.04 1008.16 0 0 1 ] \begin{bmatrix}f_x&0&c_x\\0&f_y&c_y\\0&0&1\end{bmatrix} =\begin{bmatrix} 5572.47&0&1314.18\\0&5573.04&1008.16\\0&0&1 \end{bmatrix} fx000fy0cxcy1 = 5572.470005573.0401314.181008.161
dist为畸变参数,最多有8个,分别表示k1,k2,p1,p2,k3,k4,k5,k6,本次标定得到的结果为
>>> print(dist)
[[-8.36577030e-02 -1.68977185e-01 -1.12233478e-03 9.45685802e-04-2.04246147e+01]]
这些畸变参数的物理意义如下
x ′ = x z , y ′ = y z , r = x ′ 2 + y ′ 2 K = 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 1 + k 4 r 2 + k 5 r 4 + k 6 r 6 x ′ ′ = K x ′ + 2 p 1 x ′ y ′ + p 2 ( r 2 + 2 x ′ 2 ) u = f x x ′ ′ + c x v = f y y ′ ′ + c y \begin{aligned} x'&=\frac{x}{z},\quad y'=\frac{y}{z},\quad r=\sqrt{x'^2+y'^2}\\ K& = \frac{1+k_1r^2+k2_r^4+k_3r^6}{1+k_4r^2+k_5r^4+k_6r^6}\\ x'' &= Kx'+2p_1x'y'+p_2(r^2+2x'^2)\\ u&=f_xx''+c_x\\ v&=f_yy''+c_y\\ \end{aligned} x′Kx′′uv=zx,y′=zy,r=x′2+y′2=1+k4r2+k5r4+k6r61+k1r2+k2r4+k3r6=Kx′+2p1x′y′+p2(r2+2x′2)=fxx′′+cx=fyy′′+cy
rvecs和tvecs分别表示每个标定板对应的旋转和平移向量。
相关文章:
opencv-python相机标定详解
文章目录 角点检测查看角点标定 opencv中内置了张正友的棋盘格标定法,通过一些姿态各异的棋盘格图像,就能标定相机的内外参数。 角点检测 第一步是角点检测,首先需要读取棋盘格图像 import numpy as np import cv2 import ospath imgs #…...
由斯坦福、Nautilus Chain等联合主办的 Hackathon 活动,现已接受报名
由 Stanford Blockchain Accelerator、Zebec Protocol、 Nautilus Chain、Rootz Lab 共同主办的黑客松活动,现已接受优秀项目提交参赛申请。 在加密行业发展早期,密码极客们就始终在对区块链世界基础设施,在发展方向的无限可能性进行探索。而…...
)
PBDB Data Service:Measurements of specimens(标本测量)
Measurements of specimens(标本测量) 描述参数以下参数可用于指定您感兴趣的标本种类以下参数可用于筛选所选内容以下参数还可用于根据分类筛选结果列表以下参数可用于生成数据存档您可以使用以下参数选择要检索的额外信息,以及要获取记录的…...

低调的接口工具 ApiKit
最近发现一款接口测试工具--ApiKit,我们很难将它描述为一款接口管理工具 或 接口自测试工具。 官方给了一个简单的说明,更能说明 Apikit 可以做什么。 ApiKit API 管理 Mock 自动化测试 异常监控 团队协作 ApiKit的特点: 接口文档定义&a…...
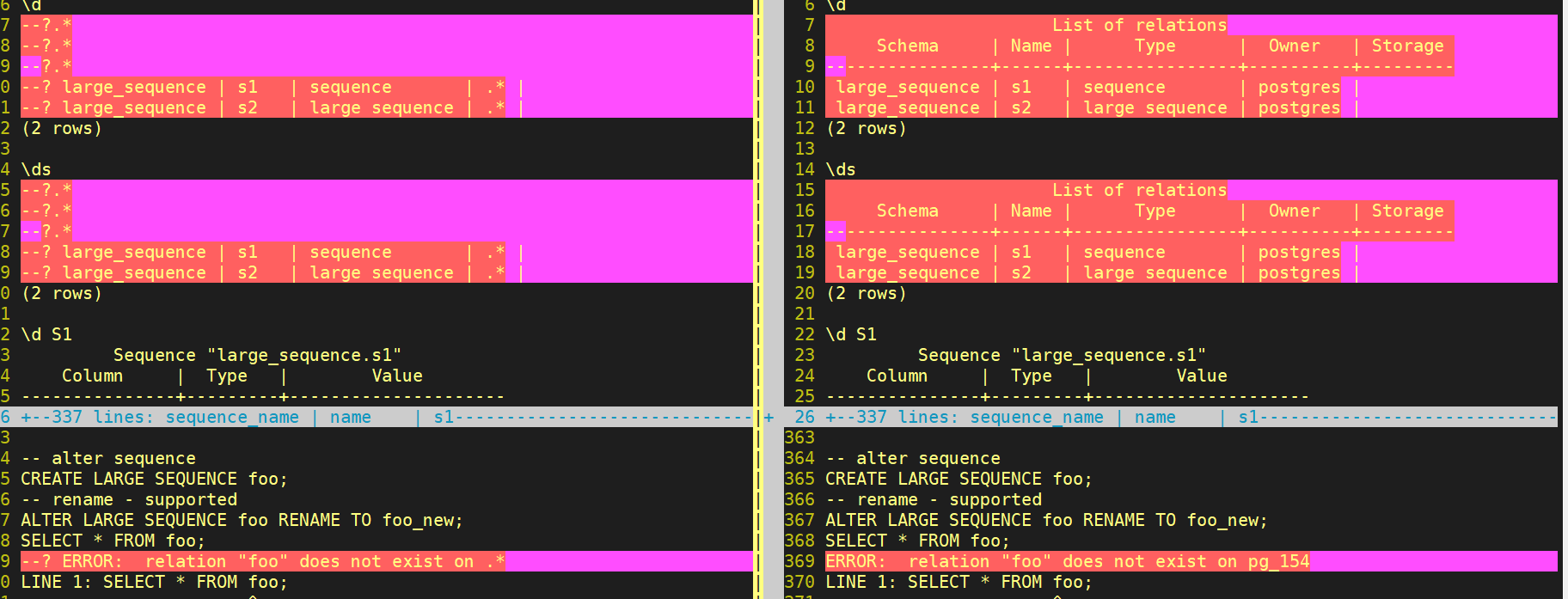
opengauss 的回归测试
目录 一、回归测试说明 二、单独执行测试用例(开发调试) 一、回归测试说明 opengauss/postgresql 的回归测试,通过执行SQL比较输出打印,判断代码修改是否改变了其它功能逻辑。 OG的回归测试大体上和PG类似,主要是通…...

计算机组成原理基础练习题第四章-计算机的运算方法
对真值0表示形式唯一的机器数是()。A、原码 B、补码和移码C、反码 D、以上都不对在整数定点机中,下述说法正确的是()。A、原码和反码不能表示-1,补码可以表示-1B、三种机器数均可表示-1C、三种机器数均可表示…...

SpringBoot定时任务里的多线程
SpringBoot定时任务里的多线程 提示前言遇到的问题验证与解决验证单线程执行单任务分析代码及结果 单线程执行多任务 解决实现单任务的多线程为每个任务创建一个子线程 解决多任务的多线程设定固定容量线程池动态设定容量线程池固定线程池和动态线程池的选择 简单总结借鉴及引用…...
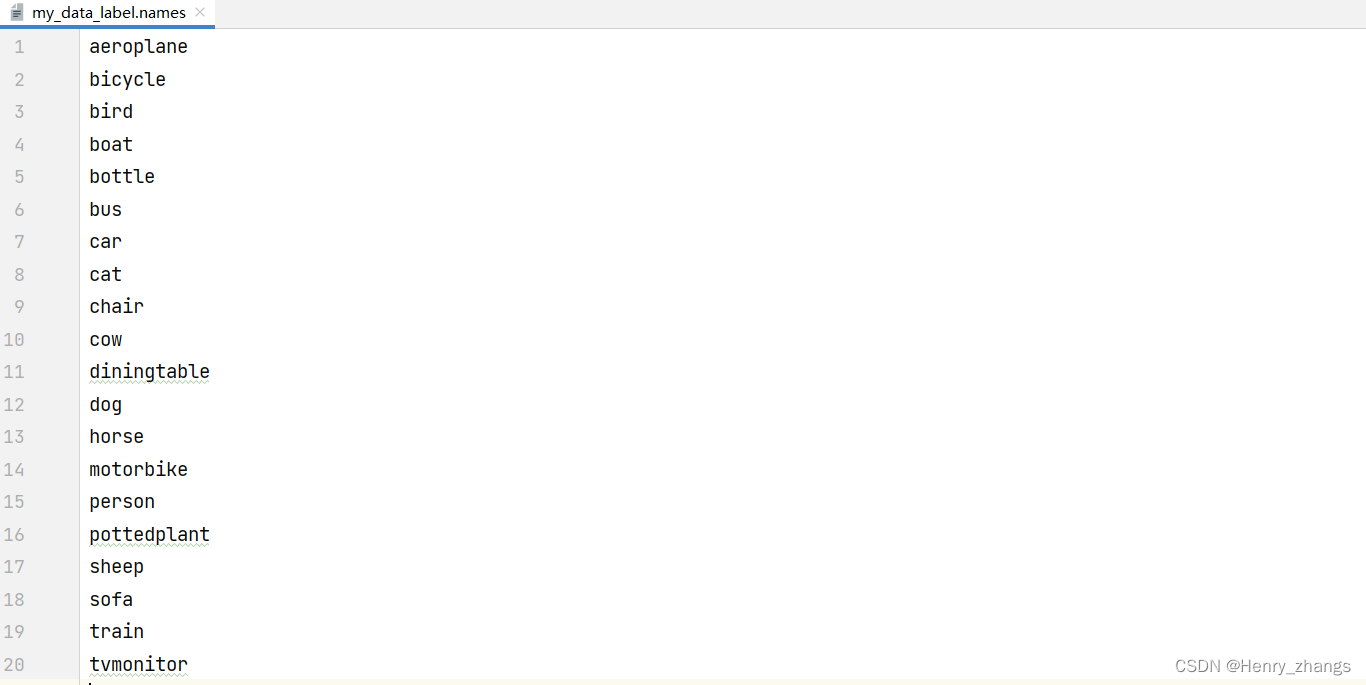
YOLO V3 SPP ultralytics 第二节:根据yolo的数据集,生成准备文件和yolo的配置文件
目录 1. 介绍 2. 完整代码 3. 代码讲解 3.1 生成 my_train_data.txt和my_val_data.txt 3.2 生成 my_data.data 文件 3.3 生成 my_yolov3.cfg 3.4 关于my_data_label.names文件 1. 介绍 根据 第一节 的操作,已经生成了下图中圆圈中的部分,而本…...

camunda流程引擎connector如何使用
在 Camunda 中,Connector 是一种用于与外部系统或服务交互的机制。它允许 BPMN 模型中的 Service Task 节点与外部系统或服务进行通信,从而使流程更加灵活和可扩展。使用 Connector,可以将业务流程与外部系统集成在一起,而无需编写…...

ECO基本概念:pre-mask eco gen patch flow
使用conformal LEC 进行pre-mask eco 时,如何产生patch,参考以下步骤: 官方推荐 Flattened ECO Flow(FEF) Conformal支持Flattened ECO Flow和Hierarchical ECO Flow。Flattened下,工具会将 ECO 分析重点…...
【初学人工智能原理】【4】梯度下降和反向传播:能改(下)
前言 本文教程均来自b站【小白也能听懂的人工智能原理】,感兴趣的可自行到b站观看。 本文【原文】章节来自课程的对白,由于缺少图片可能无法理解,故放到了最后,建议直接看代码(代码放到了前面)。 代码实…...

微信小程序路由传参
微信小程序路由传参 在微信小程序中,可以通过路由传参将数据传递给目标页面。以下是一种常见的方式: 在源页面中,使用 wx.navigateTo 或 wx.redirectTo 方法跳转到目标页面,并通过 URL 参数传递数据。示例: wx.navi…...
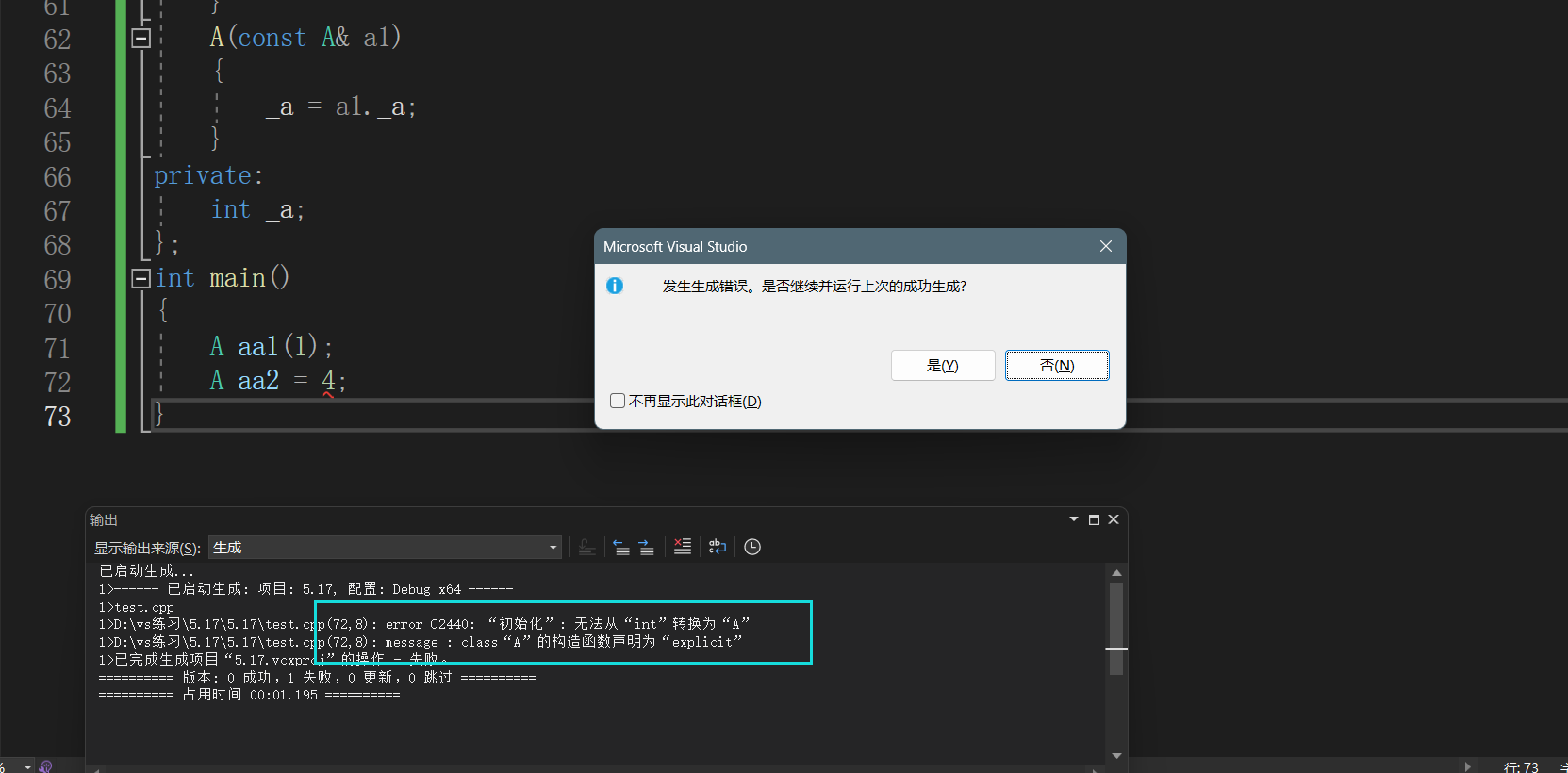
深入篇【C++】类与对象:再谈构造函数之初始化列表与explicit关键字
深入篇【C】类与对象:再谈构造函数之初始化列表与explicit关键字 Ⅰ.再谈构造函数①.构造函数体赋值②.初始化列表赋值【<特性分析>】1.至多性2.特殊成员必在性3.必走性:定义位置4.一致性5.不足性 Ⅱ.explicit关键字①.隐式类型转化②.作用 Ⅰ.再谈…...

广东棒球发展建设·棒球1号位
一、概述 棒球是一项源于美国的运动,自20世纪初开始传入中国,近年来在广东省的发展也逐渐受到关注。本文将就广东棒球的发展现状及未来发展方向进行分析。 二、发展现状 目前广东省内棒球赛事主要有以下几种: 1. 业余棒球联赛:…...

浅谈PMO对组织战略的支持︱美团骑行事业部项目管理中心负责人边国华
美团骑行事业部项目管理中心负责人边国华先生受邀为由PMO评论主办的2023第十二届中国PMO大会演讲嘉宾,演讲议题:浅谈PMO对组织战略的支持。大会将于6月17-18日在北京举办,更多内容请浏览会议日程 议题内容简要: 战略是组织运行的…...

互联网医院资质代办|互联网医院牌照的申请流程
随着互联网技术的不断发展,互联网医疗已经逐渐成为人们关注的热点话题。而互联网医院作为互联网医疗的一种重要形式,也越来越受到社会各界的关注。若想开展互联网医院业务,则需要具备互联网医院牌照。那么互联网医院牌照的申请流程和需要的资…...

网络:DPDK复习相关知识点_2
1.RTC运行至完成时模式,单核单模块 2.pipeline模式,多核多模块,每个模块都是一个处理引擎,但会有缓存一致性问题 3.Mbuff数据包内存操作对象,相当于是数据包的一个索引,对网络的处理都集中在这个Buff上 …...

阿里云大学考试Java中级题目及解析-java中级
阿里云大学考试Java中级题目及解析 1.servlet释放资源的方法是? A.int()方法 B.service()方法 C.close() 方法 D.destroy()方法 D servlet释放资源的方法是destroy() 2.order by与 group by的区别? A.order by用于排序,group by用于排序…...
【星戈瑞】Sulfo-CY3-COOH磺化/水溶性Cyanine3羧酸1121756-11-3
Sulfo-CY3 COOH是一种荧光染料,其分子结构中含有COOH官能团,最大吸收波长为550纳米左右,可以通过分光光度计等设备进行检测。Sulfo-CY3 COOH是一种带有羧基的荧光染料,可以与含有氨基的生物分子通过偶联反应形成共价键,…...

Java NIO和IO的主要区别
当学习了Java NIO和IO的API后,一个问题马上涌入脑海: 我应该何时使用IO,何时使用NIO呢?在本文中,我会尽量清晰地解析Java NIO和IO的差异、它们的使用场景,以及它们如何影响您的代码设计。 下表总结了Java N…...

ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题
ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable vari…...

ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程
ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程 【免费下载链接】ZjDroid Android app dynamic reverse tool based on Xposed framework. 项目地址: https://gitcode.com/gh_mirrors/zj/ZjDroid ZjDroid是一款基于Xposed框架的Android应用动态逆向分…...

Win10家庭版别再卡了!保姆级教程:手动修复gpedit.msc路径,彻底关闭Antimalware Service
Win10家庭版性能优化实战:精准修复组策略路径与系统服务调优每次游戏激战正酣时突然卡顿,或是视频渲染到关键时刻系统响应迟缓,很多Win10家庭版用户都遭遇过这类困扰。任务管理器里那个名为"Antimalware Service Executable"的进程…...

SSE 基础知识
SSE 基础知识 一、概念定义 SSE 全称 Server-Sent Events,是基于HTTP协议的服务器单向数据推送技术。 建立一次长连接后,服务端可主动持续向前端推送数据,无需客户端反复轮询请求。 二、核心特点 单向通信:仅服务器 → 客户端发送…...

智能体所有权与版权:AI Agent Harness Engineering 创造的作品归谁所有?
1. 标题选项 《AI Agent创作版权迷局破解:从Harness工程原理到所有权划分的完整指南》 《智能体作品归谁?AI Agent Harness Engineering场景下的版权规则深度拆解》 《告别权属纠纷:一文搞懂AI Agent生成内容的所有权、版权与收益分配规则》 《Harness工程视角下的AI创作权:…...

基于MAX78000的医疗紧急呼叫系统:边缘AI与低功耗设计实战
1. 项目概述与核心价值大家好,我是Victor Hugo,一名电子工程师。今天我想和大家分享一个我最近完成并参与设计竞赛的项目:一个基于MAX78000 FTHR开发板的医疗紧急呼叫辅助系统。这个项目的核心,不是从零开始造一个新轮子ÿ…...

机器学习驱动储氢材料发现:从特征工程到DFT/MD验证的完整指南
1. 项目概述与核心思路氢能被视为未来清洁能源体系的关键一环,但如何安全、高效、经济地储存氢气,一直是制约其大规模应用的瓶颈。在众多储氢技术路线中,固态储氢,特别是基于金属氢化物的储氢材料,因其高体积储氢密度和…...

Office RibbonX Editor:简单三步打造你的专属Office界面
Office RibbonX Editor:简单三步打造你的专属Office界面 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-edit…...

基于雷达与光敏传感器的低功耗智能窗防设备设计与实现
1. 项目概述:一个基于雷达与光敏的智能窗防设备几年前,我因为一次短暂的出差,家里空置了几天,回来后就一直琢磨着怎么给家里的窗户加点“动静”。市面上的智能安防摄像头固然好,但要么需要复杂的布线,要么云…...

淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理
淘宝淘金币自动化脚本终极指南:如何每天节省25分钟实现智能任务管理 【免费下载链接】taojinbi 淘宝淘金币自动执行脚本,包含蚂蚁森林收取能量,芭芭农场全任务,解放你的双手 项目地址: https://gitcode.com/gh_mirrors/ta/taoji…...