BEVDet4D 论文学习
1. 解决了什么问题?
单帧数据包含的信息很有限,制约了目前基于视觉的多相机 3D 目标检测方法的性能,尤其是关于速度预测任务,要远落后于基于 LiDAR 和 radar 的方法。
2. 提出了什么方法?
BEVDet4D 将 BEVDet 方法从 3D 扩展到时间+空间的 4D 范畴。作者改进了 BEVDet 框架,在当前帧的特征中融合了之前帧的特征,只增加了少量的计算成本。BEVDet4D 简化了速度预测问题,将其看作为相邻帧特征之间的位置偏移预测问题。如下图,它保留了之前帧的 BEV 特征,将其与当前帧的特征通过空间对齐与 concat 操作融合。

2.1 网络结构
BEVDet 包括 4 个模块:image-view encoder、view transformer、BEV encder、task-specific head。为了融入时间信息,BEVDet4D 保留了 view transformer 对之前帧生成的特征。然后进行对齐,和当前帧的特征完成融合。View transformer 生成的特征对于后续模块来说,过于稀疏、粗糙。因此在时域融合操作前,有一个调整候选特征的 BEV 编码器,包括 2 个残差单元,通道数和输入特征数一致。
2.2 Simplify the Velocity Learning Task

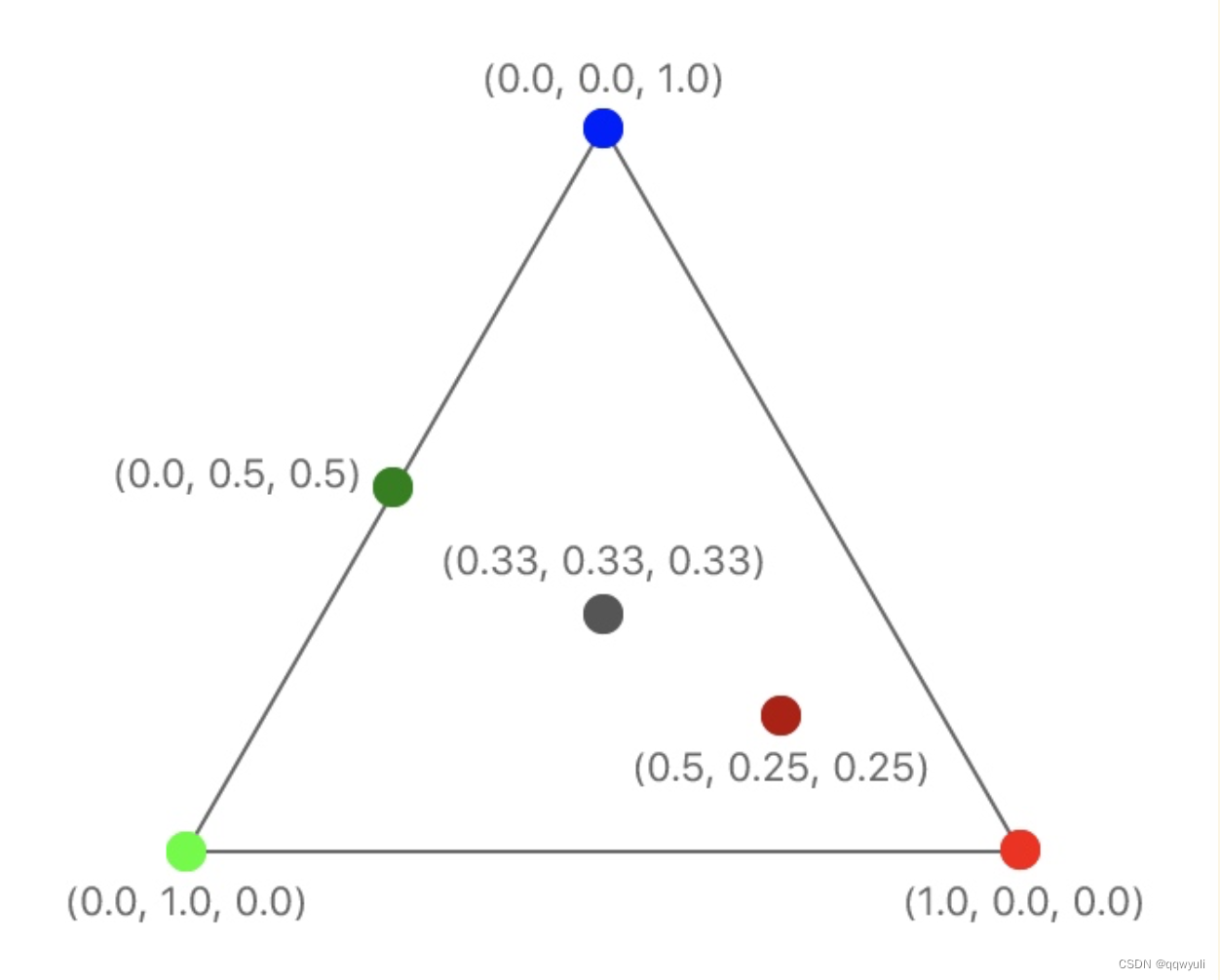
符号定义 全局坐标系为 O g − X Y Z O_g - XYZ Og−XYZ,自身坐标系为 O e ( T ) − X Y Z O_{e(T)}-XYZ Oe(T)−XYZ,目标坐标系为 O t ( T ) − X Y Z O_{t(T)}-XYZ Ot(T)−XYZ。如上图,作者构建了一个虚拟场景,包括一辆运动中的 ego 车辆和两个目标车辆。在世界坐标系内,一个目标车辆是静止的(即 O s − X Y Z O_s-XYZ Os−XYZ绿色框),一个目标车辆是运动状态的(即 O m − X Y Z O_m-XYZ Om−XYZ蓝色框)。两个相邻帧(第 T − 1 T-1 T−1帧和第 T T T帧)的物体通过透明度区分。物体的位置表示为 P x ( t ) \text{P}^x(t) Px(t), x ∈ { g , e ( T ) , e ( T − 1 ) } x\in\lbrace g,e(T),e(T-1)\rbrace x∈{g,e(T),e(T−1)}表示坐标系。 t ∈ { T , T − 1 } t\in\lbrace T,T-1\rbrace t∈{T,T−1}表示时间戳。 T s r c d s t \text{T}^{dst}_{src} Tsrcdst表示从源坐标系到目标坐标系的变换。
本文方法不是直接预测目标的速度,而是预测相邻帧之间目标物体的平移量。排除了时间因素,任务就简化了,根据两个 BEV 特征间的差异就可计算出位置的移动。此外,该方法学习的位置移动与 ego 车辆自身的运动是没有关系的,因为 ego 的运动会让目标物体位置移动的分布变得很复杂。
如上图所示,由于 ego 的运动,原本在世界坐标系是静止的物体,在 ego 坐标系就成了运动的了。View transformer 对两个相邻帧生成特征,由于 ego 运动,它们在世界坐标系的感受野是不同的。一个静止物体在前后两帧的世界坐标系位置是 P s g ( T ) \text{P}_s^g(T) Psg(T)和 P s g ( T − 1 ) P_s^g(T-1) Psg(T−1)。位置的移动可以表示为:
P s e ( T ) ( T ) − P s e ( T − 1 ) ( T − 1 ) = T g e ( T ) P s g ( T ) − T g e ( T − 1 ) P s g ( T − 1 ) = T g e ( T ) P s g ( T ) − T e ( T ) e ( T − 1 ) T g e ( T ) P s g ( T − 1 ) \begin{align} &\text{P}_s^{e(T)}(T)-\text{P}_s^{e(T-1)}(T-1)\nonumber \\ =&\text{T}_g^{e(T)}\text{P}_s^g(T)-\text{T}_g^{e(T-1)}\text{P}_s^g(T-1)\nonumber\\ =&\text{T}_g^{e(T)}\text{P}_s^g(T)-\text{T}_{e(T)}^{e(T-1)}\text{T}_{g}^{e(T)}\text{P}_s^g(T-1)\nonumber \end{align} ==Pse(T)(T)−Pse(T−1)(T−1)Tge(T)Psg(T)−Tge(T−1)Psg(T−1)Tge(T)Psg(T)−Te(T)e(T−1)Tge(T)Psg(T−1)
根据上面等式,如果直接将 2 个特征 concat,后续模块的学习目标(即物体在两个特征图的位置偏移)就包含了 ego 运动(即 T e ( T ) e ( T − 1 ) \text{T}_{e(T)}^{e(T-1)} Te(T)e(T−1))。为了避免,作者利用 T e ( T − 1 ) e ( T ) \text{T}_{e(T-1)}^{e(T)} Te(T−1)e(T)对相邻帧的物体进行变换,排除 ego 运动的影响。
P s e ( T ) ( T ) − T e ( T − 1 ) e ( T ) P s e ( T − 1 ) ( T − 1 ) = T g e ( T ) P s g ( T ) − T e ( T − 1 ) e ( T ) T e ( T ) e ( T − 1 ) T g e ( T ) P s g ( T − 1 ) = T g e ( T ) P s g ( T ) − T g e ( T ) P s g ( T − 1 ) = P s e ( T ) ( T ) − P s e ( T ) ( T − 1 ) \begin{align} &\text{P}_s^{e(T)}(T)-\text{T}_{e(T-1)}^{e(T)}\text{P}_s^{e(T-1)}(T-1)\nonumber \\ =&\text{T}_g^{e(T)}\text{P}_s^g(T)-\text{T}_{e(T-1)}^{e(T)}\text{T}_{e(T)}^{e(T-1)}\text{T}_g^{e(T)}\text{P}_s^g(T-1)\nonumber\\ =&\text{T}_g^{e(T)}\text{P}_s^g(T)-\text{T}_{g}^{e(T)}\text{P}_s^g(T-1)\nonumber\\ =&\text{P}_{s}^{e(T)}(T)-\text{P}_s^{e(T)}(T-1)\nonumber\\ \end{align} ===Pse(T)(T)−Te(T−1)e(T)Pse(T−1)(T−1)Tge(T)Psg(T)−Te(T−1)e(T)Te(T)e(T−1)Tge(T)Psg(T−1)Tge(T)Psg(T)−Tge(T)Psg(T−1)Pse(T)(T)−Pse(T)(T−1)
根据上面等式,学习目标定为了当前帧 ego 坐标系中的物体运动,与 ego 运动就没关系了。该等式的对齐操作通过特征对齐实现。给定之前帧的候选特征 F ( T − 1 , P e ( T − 1 ) ) \mathcal{F}(T-1,\text{P}^{e(T-1)}) F(T−1,Pe(T−1))以及当前帧的 F ( T , P e ( T ) ) \mathcal{F}(T,\text{P}^{e(T)}) F(T,Pe(T)),通过下面等式实现对齐特征:
F ′ ( T − 1 , P e ( T ) ) = F ( T − 1 , T e ( T ) e ( T − 1 ) P e ( T ) ) \mathcal{F}'(T-1,\text{P}^{e(T)})=\mathcal{F}(T-1,\text{T}_{e(T)}^{e(T-1)}\text{P}^{e(T)}) F′(T−1,Pe(T))=F(T−1,Te(T)e(T−1)Pe(T))
T e ( T ) e ( T − 1 ) P e ( T ) \text{T}_{e(T)}^{e(T-1)}\text{P}^{e(T)} Te(T)e(T−1)Pe(T)在特征 F ( T − 1 , P e ( T − 1 ) ) \mathcal{F}(T-1,\text{P}^{e(T-1)}) F(T−1,Pe(T−1))上可能不是一个有效的位置,因此需要使用双线性插值。
3. 有什么优点?
BEVDet4D 预测 velocity 的错误率降低了 − 62.9 % -62.9\% −62.9%,与那些基于 LiDAR 或 radar 的方法表现相近。在 nuScenes 基准上取得了 54.5 % 54.5\% 54.5%NDS。
相关文章:
BEVDet4D 论文学习
1. 解决了什么问题? 单帧数据包含的信息很有限,制约了目前基于视觉的多相机 3D 目标检测方法的性能,尤其是关于速度预测任务,要远落后于基于 LiDAR 和 radar 的方法。 2. 提出了什么方法? BEVDet4D 将 BEVDet 方法从…...
:如何设计实现一个集群环境下的分布式单例模式?)
【设计模式与范式:创建型】43 | 单例模式(下):如何设计实现一个集群环境下的分布式单例模式?
上两节课中,我们针对单例模式,讲解了单例的应用场景、几种常见的代码实现和存在的问题,并粗略给出了替换单例模式的方法,比如工厂模式、IOC 容器。今天,我们再进一步扩展延伸一下,一块讨论一下下面这几个问…...
Metal入门学习:绘制渲染三角形
一、编程指南PDF下载链接(中英文档) 1、Metal编程指南PDF链接 https://github.com/dennie-lee/ios_tech_record/raw/main/Metal学习PDF/Metal 编程指南.pdf 2、Metal着色语言(Metal Shader Language:简称MSL)编程指南PDF链接 https://github.com/dennie-lee/ios_te…...
python 中常见变量类型
数值 a 10 b 123 … 字符串 在python中 用单引号’‘和双引号""括起来的都是字符串,不使用引号括起来的不是字符串,字符串是使用最多的数据类型,用来表示一段文本信息。 比如: a ‘123’ b “123” 字符串之间可以用加法运算…...
SVN使用教程(一)
文章目录 前言一、SVN是什么?二、SVN和Git对比,有什么优势?三、SVN主要应用四、SVN仓库五、安装SVN客户端 前言 提示:这里可以添加本文要记录的大概内容: 在制作系统或者写文档,都需要用于管理和跟踪开发…...

【5.19】四、性能测试—指标、种类
目录 4.1 性能测试概述 4.2 性能测试的指标 4.3 性能测试的种类 为了追求高质量、高效率的生活与工作,人们对软件产品的性能要求越来越高,例如软件产品要足够稳定、响应速度足够快,在用户量、工作量较大时也不会出现崩溃或卡顿等现象。人们…...
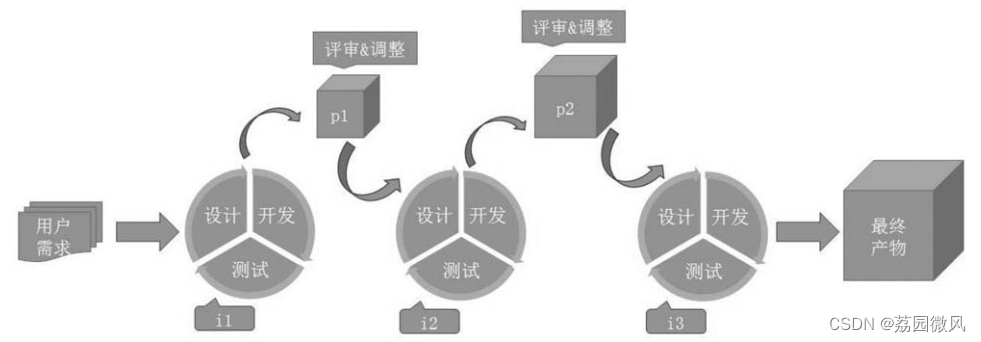
Windows平台上的5种敏捷软件开发(过程)模型
我是荔园微风,作为一名在IT界整整25年的老兵,今天总结一下Windows平台上的5种敏捷软件开发(过程)模型。 说到这个问题,你必须先知道除了敏捷模型还有没有其他什么模型?同时要比较模型的区别,首先还要看看什么叫软件开…...

一文实现部署AutoGPT
一文实现部署AutoGPT 简介AutoGPT的概述AutoGPT的用途和优势 预备知识Python基础机器学习基础自然语言处理基础 环境设置Python环境安装和配置需要的库和框架的安装,例如PyTorch, Transformers等 AutoGPT模型加载如何下载和加载预训练的AutoGPT模型模型参数和配置 使…...
数值计算 - 误差的来源
误差的来源是多方面的,但主要来源为:过失误差,描述误差,观测误差,截断误差和舍入误差。 过失误差 过失误差是由设备故障和人为的错误所产生的误差,在由于每个人都有“权利”利用机器进行数值计算,所以在计算…...
【软件测试】5年测试老鸟总结,自动化测试成功实施,你应该知道的...
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 自动化测试 Pytho…...
【Hadoop】二、Hadoop MapReduce与Hadoop YARN
文章目录 二、Hadoop MapReduce与Hadoop YARN1、Hadoop MapReduce1.1、理解MapReduce思想1.2、Hadoop MapReduce设计构思1.3、Hadoop MapReduce介绍1.4、Hadoop MapReduce官方示例1.5、Map阶段执行流程1.6、Reduce阶段执行流程1.7、Shuffle机制 2、Hadoop YARN2.1、Hadoop YARN…...

Python教程:文件I/O的用法
本章只讲述所有基本的的I/O函数,更多函数请参考Python标准文档。 1.打印到屏幕 最简单的输出方法是用print语句,你可以给它传递零个或多个用逗号隔开的表达式。此函数把你传递的表达式转换成一个字符串表达式,并将结果写到标准输出如下&…...

序员工作1年,每天上班清闲,但却焦虑万分,若是你,你会吗?
有个学弟在后台留言 他谈到了自己去年毕业的 因为在大学里边有一些校企合作 所以呢他也是花了钱 然后去培训了有半年 去年毕业之后到现在工作有一年了 那目前的薪资是8,000块钱 虽然说相较于其他同学呢 这个薪资呢还算可以 但是呢 自己每天现在就处于一种非常 压抑的那种状态 所…...

Bed Bath and Beyond EDI 需求分析
Bed Bath and Beyond(Bed Bath and Beyond)是一家美国的家居用品零售商,成立于1971年,总部位于新泽西州Union。该公司在美国、加拿大和墨西哥拥有超过1500家门店。其产品涵盖了床上用品、浴室用品、厨房用品、家居装饰等领域&…...
【5.20】五、安全测试——渗透测试
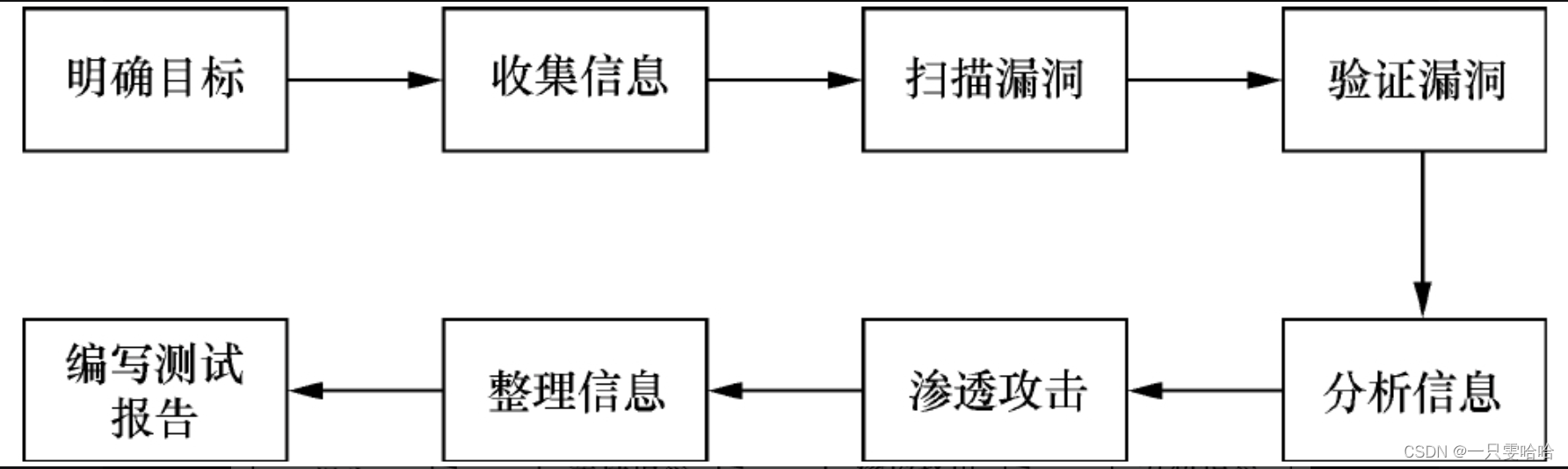
目录 5.3 渗透测试 5.3.1 什么是渗透测试 5.3.2 渗透测试的流程 5.3 渗透测试 5.3.1 什么是渗透测试 渗透测试是利用模拟黑客攻击的方式,评估计算机网络系统安全性能的一种方法。这个过程是站在攻击者角度对系统的任何弱点、技术缺陷或漏洞进行主动分析&#x…...
java版鸿鹄工程项目管理系统 Spring Cloud+Spring Boot+前后端分离构建工程项目管理系统源代码
鸿鹄工程项目管理系统 Spring CloudSpring BootMybatisVueElementUI前后端分离构建工程项目管理系统 1. 项目背景 一、随着公司的快速发展,企业人员和经营规模不断壮大。为了提高工程管理效率、减轻劳动强度、提高信息处理速度和准确性,公司对内部工程管…...
大语言模型架构设计
【大模型慢学】GPT起源以及GPT系列采用Decoder-only架构的原因探讨 - 知乎本文回顾GPT系列模型的起源论文并补充相关内容,中间主要篇幅分析讨论为何GPT系列从始至终选择采用Decoder-only架构。 本文首发于微信公众号,欢迎关注:AI推公式最近Ch…...
SpringBoot整合Swagger2,让接口文档管理变得更简单
在软件开发的过程中,接口文档的编写往往是一个非常重要的环节,因为它是前端和后端沟通的桥梁,帮助团队更好地协作。然而,手动编写接口文档不仅耗费时间,还容易出错,因此我们需要一种简单的方法来管理接口文…...

socket | 网络套接字、网络字节序、sockaddr结构
欢迎关注博主 Mindtechnist 或加入【Linux C/C/Python社区】一起学习和分享Linux、C、C、Python、Matlab,机器人运动控制、多机器人协作,智能优化算法,滤波估计、多传感器信息融合,机器学习,人工智能等相关领域的知识和…...

golang-websocket
WebSocket 是一种新型的网络通信协议,可以在 Web 应用程序中实现双向通信。 WebSocket与HTTP协议的主要区别是: HTTP 和 WebSocket 协议的区别 HTTP 是单向的,而 WebSocket 是双向的。 在客户端和服务器之间的通信中,每个来自客…...

如何用deberta-v3-base-zeroshot-v2.0构建企业级NLP应用?完整教程来了
如何用deberta-v3-base-zeroshot-v2.0构建企业级NLP应用?完整教程来了 【免费下载链接】deberta-v3-base-zeroshot-v2.0 项目地址: https://ai.gitcode.com/hf_mirrors/NingBo_Ascend/deberta-v3-base-zeroshot-v2.0 deberta-v3-base-zeroshot-v2.0是一款基…...

深度学习从心电信号中解码呼吸频率:原理、实现与临床价值
1. 项目概述:从心电信号中“听”到呼吸声呼吸频率,这个我们每分钟都在进行却很少被精确量化的生命体征,在临床医学中扮演着至关重要的角色。它不仅是评估呼吸系统功能的直接指标,更是反映全身代谢、循环乃至神经系统状态的“窗口”…...

3分钟掌握HashCalculator:你的文件完整性守护专家
3分钟掌握HashCalculator:你的文件完整性守护专家 【免费下载链接】HashCalculator 哈希值计算工具,批量计算/批量校验/查找重复文件/改变哈希值等,支持集成到系统右键菜单 项目地址: https://gitcode.com/gh_mirrors/ha/HashCalculator …...

1901-2022年中国气温变化分析实战:用这份1km栅格数据我们能发现什么?
1901-2022年中国气温变化分析实战:如何从1km栅格数据中挖掘气候演变规律当一份覆盖122年、分辨率精确到1公里的气温栅格数据摆在面前时,我们看到的不仅是数字矩阵,更是一部写在经纬度坐标里的气候变迁史诗。这份由逐月数据聚合生成的逐年气温…...

Gazebo Sim多旋翼控制:四轴飞行器动力学建模与PID调参
Gazebo Sim多旋翼控制:四轴飞行器动力学建模与PID调参 【免费下载链接】gz-sim Open source robotics simulator. The latest version of Gazebo. 项目地址: https://gitcode.com/gh_mirrors/gz/gz-sim Gazebo Sim是一款功能强大的开源机器人模拟器ÿ…...

Adobe-GenP 3.0:轻松激活Adobe全家桶的完整指南
Adobe-GenP 3.0:轻松激活Adobe全家桶的完整指南 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP Adobe-GenP 3.0是一款专为Adobe Creative Cloud系列软件…...

告别多头对接!DMXAPI 为企业打造国产大模型 “统一入口”
一、企业 AI 落地的普遍痛点:被接口和平台消耗的成本在企业数字化转型的浪潮中,AI 大模型已经成为标配,但很多企业在落地时,都会陷入一个共同的困境:为了满足不同业务场景的需求,需要同时对接 DeepSeek、阿…...
 讲清楚,并结合 金融场景(含自进化智能体) 给出可直接用的案例)
招行+工行:ReAct(Reasoning + Acting) 讲清楚,并结合 金融场景(含自进化智能体) 给出可直接用的案例
下面我把 ReAct(Reasoning Acting) 讲清楚,并结合 ** 金融场景(含自进化智能体)** 给出可直接用的案例与话术,适合分享 / 汇报。一、ReAct 是什么(一句话)ReAct 推理(T…...
)
【C++】零基础入门 · 第 4 节:循环结构(while、for、do-while)
上一节我们学习了条件判断,这一节来学习循环结构。循环让程序能够重复执行某段代码,直到满足特定条件为止。C 提供了三种循环语句:while、for 和 do-while。 1. while 循环:先判断后执行 while 循环在每次执行前先检查条件&#x…...

基于Jetson Nano与JNEEG Shield的脑电信号采集与边缘AI处理实战
1. 项目概述:低成本脑机接口的硬件基石 如果你对脑机接口、生物信号处理或者边缘AI应用感兴趣,但又苦于专业设备动辄数万甚至数十万的高昂门槛,那么JNEEG Shield的出现,可能会为你打开一扇新的大门。这是一个专为NVIDIA Jetson Na…...