【从零开始写视觉SLAM】v0.1基于特征点的简单VO
v0.1版本的oSLAM实现了基于orb特征点的简单视觉里程计,通过连续两帧的rgbd数据实现相机相对位姿的估计。
这部分理论上相对简单一点,咱们就直接上实现。
- VisualOdometer类
VisualOdometer.hpp
#pragma once
#include <vector>
#include <opencv2/opencv.hpp>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "Frame.hpp"namespace oSLAM
{class VisualOdometer{private:std::vector<Frame> frames;int max_key_points_num;double cx, cy, fx, fy;double depth_scale;std::vector<cv::DMatch> matches;void feature_extract(const cv::Mat& rgb, Frame& frame);void calc_depth(const cv::Mat& depth, Frame& frame);void feature_match(const Frame& ref, const Frame& cur, std::vector<cv::DMatch>& matches);void calc_pose_relative(const Frame& ref, Frame& cur, const std::vector<cv::DMatch>& matches);void pose_estimation_3d2d(const std::vector<cv::Point3d> &pts1, const std::vector<cv::Point2d> &pts2, cv::Mat &R, cv::Mat &t);void pose_estimation_3d3d(const std::vector<cv::Point3d> &pts1, const std::vector<cv::Point3d> &pts2, cv::Mat &R, cv::Mat &t);public:void add(double timestamp, const cv::Mat &rgb, const cv::Mat& depth);void set_pose(int frame_idx, const cv::Mat& R, const cv::Mat& T);void get_pose(int frame_idx, cv::Mat& R, cv::Mat& T);void get_3d_points(int frame_idx, std::vector<cv::Point3d> &key_points_3d);VisualOdometer(int max_key_points_num, double cx, double cy, double fx, double fy, double depth_scale);~VisualOdometer();};
}
VisualOdometer.cpp
#include "VisualOdometer.hpp"
#include <Eigen/Core>
#include <Eigen/Dense>
#include <Eigen/SVD>using namespace oSLAM;
using namespace std;
using namespace cv;VisualOdometer::VisualOdometer(int max_key_points_num, double cx, double cy, double fx, double fy, double depth_scale)
{VisualOdometer::max_key_points_num = max_key_points_num;VisualOdometer::cx = cx;VisualOdometer::cy = cy;VisualOdometer::fx = fx;VisualOdometer::fy = fy;VisualOdometer::depth_scale = depth_scale;
}VisualOdometer::~VisualOdometer()
{
}void VisualOdometer::feature_extract(const cv::Mat &rgb, Frame &frame)
{Ptr<ORB> orb_detector = ORB::create(max_key_points_num);orb_detector->detect(rgb, frame.key_points);orb_detector->compute(rgb, frame.key_points, frame.descriptors);
}void VisualOdometer::calc_depth(const cv::Mat &depth, Frame &frame)
{for (int i=0;i<frame.key_points.size();i++){double x = frame.key_points[i].pt.x;double y = frame.key_points[i].pt.y;double dis = depth.at<uint16_t>(int(y),int(x)) / depth_scale;frame.key_points_3d.push_back(Point3d((x-cx)/fx*dis, (y-cy)/fy*dis, dis));}
}void VisualOdometer::pose_estimation_3d2d(const std::vector<cv::Point3d> &pts1, const std::vector<cv::Point2d> &pts2, cv::Mat &R, cv::Mat &t)
{// 利用PnP求解位姿初值Mat K = (Mat_<double>(3,3) << fx, 0, cx, 0, fy, cy,0, 0, 1);Mat rvec, tvec;solvePnPRansac(pts1, pts2, K, Mat::zeros(1, 5, CV_64FC1), rvec, tvec);Rodrigues(rvec, R);t = (Mat_<double>(3,1) << tvec.at<double>(0), tvec.at<double>(1), tvec.at<double>(2));// 优化位姿和3D点坐标// ToDo
}void VisualOdometer::pose_estimation_3d3d(const std::vector<cv::Point3d> &pts1, const std::vector<cv::Point3d> &pts2, cv::Mat &R, cv::Mat &t)
{Point3d p1(0, 0, 0), p2(0, 0, 0); // center of massint N = pts1.size();for (int i = 0; i < N; i++){p1 += pts1[i];p2 += pts2[i];}p1 = Point3d(Vec3d(p1) / N);p2 = Point3d(Vec3d(p2) / N);vector<Point3d> q1(N), q2(N); // remove the centerfor (int i = 0; i < N; i++){q1[i] = pts1[i] - p1;q2[i] = pts2[i] - p2;}// compute q1*q2^TEigen::Matrix3d W = Eigen::Matrix3d::Zero();for (int i = 0; i < N; i++){W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose();}// SVD on WEigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);Eigen::Matrix3d U = svd.matrixU();Eigen::Matrix3d V = svd.matrixV();Eigen::Matrix3d R_ = U * (V.transpose());if (R_.determinant() < 0){R_ = -R_;}Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z);// convert to cv::MatR = (Mat_<double>(3, 3) << R_(0, 0), R_(0, 1), R_(0, 2),R_(1, 0), R_(1, 1), R_(1, 2),R_(2, 0), R_(2, 1), R_(2, 2));t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}void VisualOdometer::calc_pose_relative(const Frame& ref, Frame& cur, const std::vector<cv::DMatch>& matches)
{vector<Point3d> ref_key_points_3d, cur_key_points_3d;vector<Point2d> ref_key_points_2d, cur_key_points_2d;// 筛选3D点for(auto match : matches){Point3d ref_key_point_3d = ref.key_points_3d[match.queryIdx];Point3d cur_key_point_3d = cur.key_points_3d[match.trainIdx];if (ref_key_point_3d.z == 0 || cur_key_point_3d.z == 0){continue;}ref_key_points_3d.push_back(ref_key_point_3d);cur_key_points_3d.push_back(cur_key_point_3d);ref_key_points_2d.push_back(ref.key_points[match.queryIdx].pt);cur_key_points_2d.push_back(cur.key_points[match.trainIdx].pt);}// 3D点计算位姿Mat R, T;//pose_estimation_3d3d(cur_key_points_3d, ref_key_points_3d, R, T);pose_estimation_3d2d(ref_key_points_3d, cur_key_points_2d, R, T);cur.R = R * ref.R;cur.T = R * ref.T + T;
}void VisualOdometer::feature_match(const Frame& ref, const Frame& cur, std::vector<cv::DMatch>& matches)
{vector<DMatch> initial_matches;BFMatcher matcher(NORM_HAMMING);matcher.match(ref.descriptors, cur.descriptors, initial_matches);double min_dis = initial_matches[0].distance;for(auto match : initial_matches){if (match.distance < min_dis)min_dis = match.distance;}matches.clear();for(auto match : initial_matches){if (match.distance <= MAX(min_dis * 2, 30))matches.push_back(match);}
}void VisualOdometer::add(double timestamp, const Mat &rgb, const Mat &depth)
{Frame frame;frame.time_stamp = timestamp;frame.rgb = rgb.clone();frame.depth = depth.clone();// 提取rgb图像的orb特征点VisualOdometer::feature_extract(rgb, frame);// 提取关键点的深度信息VisualOdometer::calc_depth(depth, frame);// 如果不是第一帧if (VisualOdometer::frames.size() == 0){frame.R = Mat::eye(3,3,CV_64FC1);frame.T = Mat::zeros(3,1,CV_64FC1);}else{// 当前帧与上一帧特征点匹配VisualOdometer::feature_match(VisualOdometer::frames[VisualOdometer::frames.size()-1], frame,VisualOdometer::matches);// 计算相对位姿关系VisualOdometer::calc_pose_relative(VisualOdometer::frames[VisualOdometer::frames.size()-1], frame,VisualOdometer::matches);}// 将当前帧加入队列VisualOdometer::frames.push_back(frame);
}void VisualOdometer::get_pose(int frame_idx, Mat &R, Mat &T)
{if (VisualOdometer::frames.size() <= abs(frame_idx)){R = Mat();T = Mat();return;}else{if (frame_idx >= 0){R = VisualOdometer::frames[frame_idx].R.clone();T = VisualOdometer::frames[frame_idx].T.clone();}else{R = VisualOdometer::frames[VisualOdometer::frames.size() + frame_idx].R.clone();T = VisualOdometer::frames[VisualOdometer::frames.size() + frame_idx].T.clone();}}
}void VisualOdometer::set_pose(int frame_idx, const cv::Mat& R, const cv::Mat& T)
{if (VisualOdometer::frames.size() <= abs(frame_idx)){return;}else{if (frame_idx >= 0){VisualOdometer::frames[frame_idx].R = R.clone();VisualOdometer::frames[frame_idx].T = T.clone();}else{VisualOdometer::frames[VisualOdometer::frames.size() + frame_idx].R = R.clone();VisualOdometer::frames[VisualOdometer::frames.size() + frame_idx].T = T.clone();}}
}void VisualOdometer::get_3d_points(int frame_idx, std::vector<cv::Point3d> &key_points_3d)
{if (VisualOdometer::frames.size() <= abs(frame_idx)){key_points_3d.clear();return;}else{if (frame_idx >= 0){key_points_3d = VisualOdometer::frames[frame_idx].key_points_3d;}else{key_points_3d = VisualOdometer::frames[VisualOdometer::frames.size() + frame_idx].key_points_3d;}}
}
- Frame类
#pragma once
#include <vector>
#include <opencv2/opencv.hpp>namespace oSLAM
{class Frame{public:std::vector<cv::KeyPoint> key_points;cv::Mat descriptors;std::vector<cv::Point3d> key_points_3d;cv::Mat R;cv::Mat T;cv::Mat rgb;cv::Mat depth;double time_stamp;};
}
最终在rgbd_dataset_freiburg2_desk数据集上测试类一下效果,感觉有点拉,跑着跑着就飘了(红色的是真值,绿色的是计算结果),等实现了完整的vo在回来分析一下。
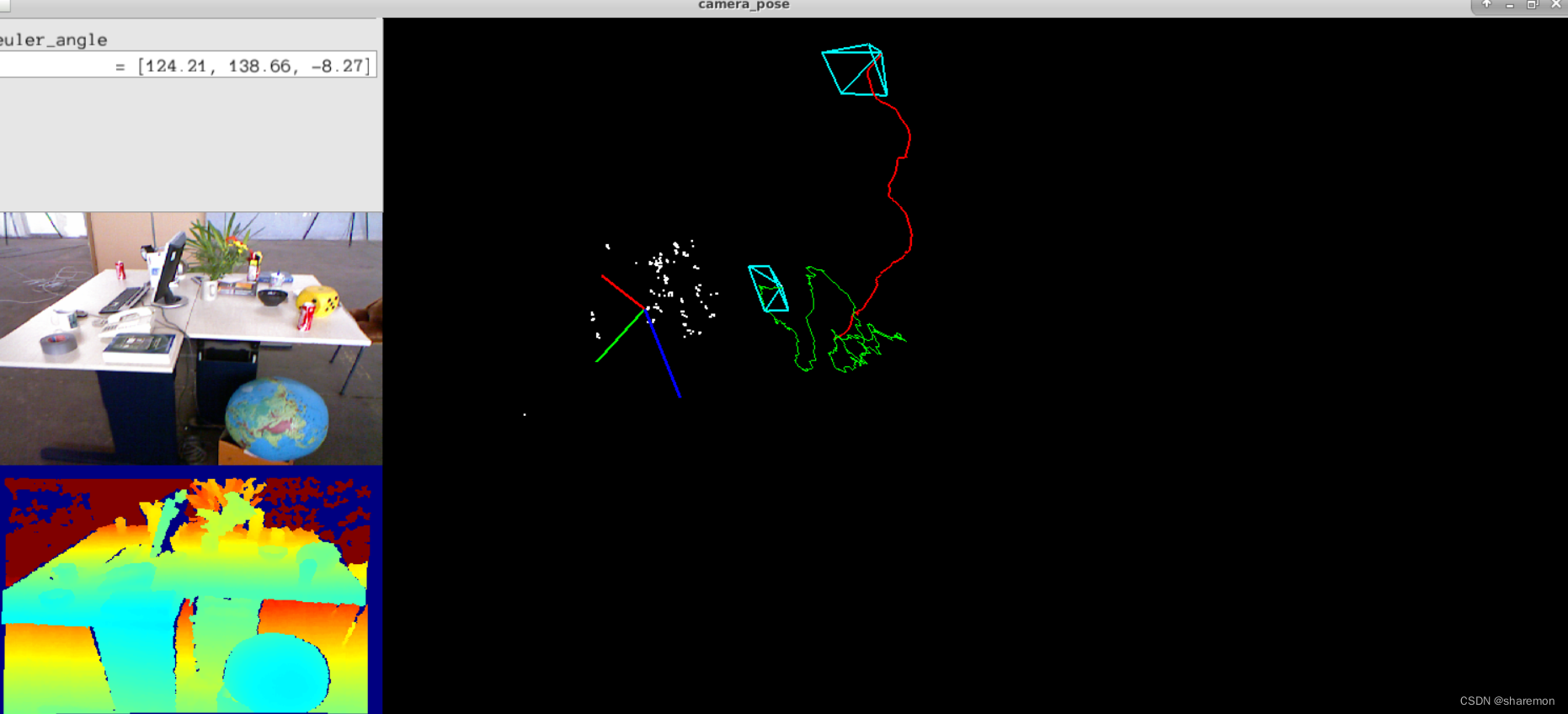
结果展示使用了Pangolin和yuntianli91的pangolin_tutorial
相关文章:
【从零开始写视觉SLAM】v0.1基于特征点的简单VO
v0.1版本的oSLAM实现了基于orb特征点的简单视觉里程计,通过连续两帧的rgbd数据实现相机相对位姿的估计。 #mermaid-svg-ibQfHFVHezQD5RWW {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-ibQfHFVHezQD5RW…...
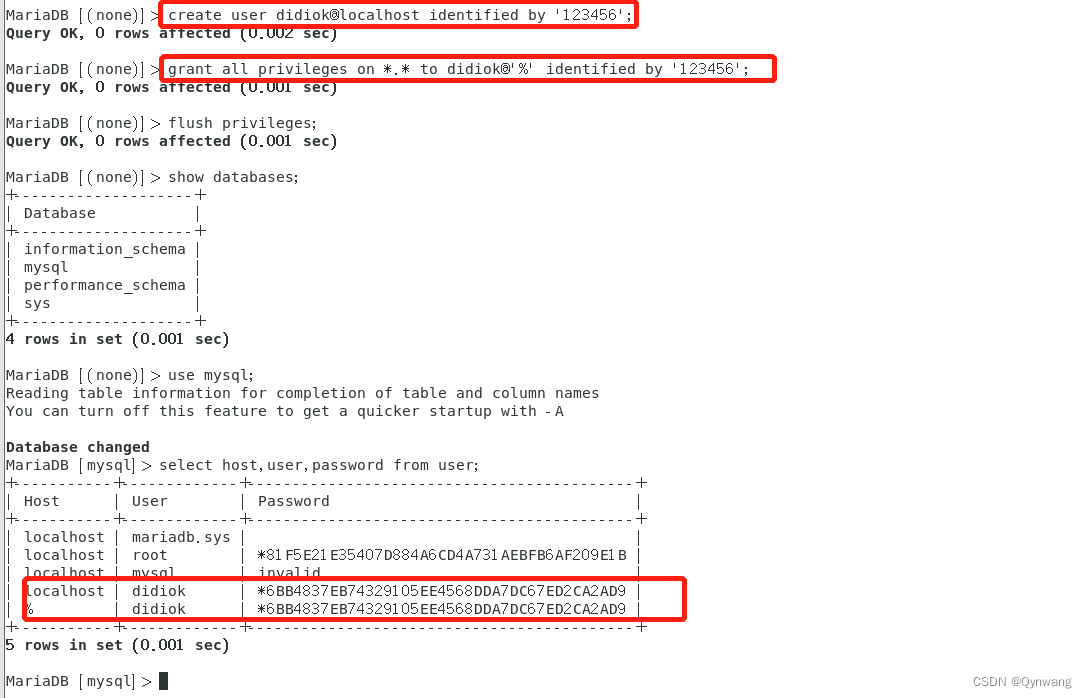
CentOS-7 安装 MariaDB-10.8
一、安装之前删除已存在的 Mysql/MariaDB 1 查找存在的 MariaDB # 注意大小写 rpm -qa | grep MariaDB # rpm -qa 列出所有被安装的rpm package (-qa:query all) rpm -qa | grep mariadb # grep (缩写来自Globally search a Regular Expre…...
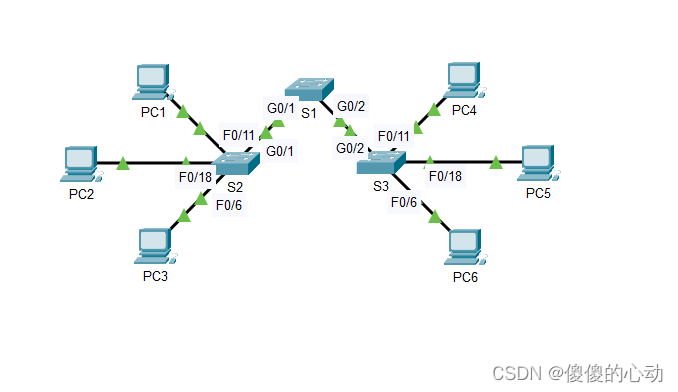
Packet Tracer – 对 VLAN 实施进行故障排除 – 方案 1
Packet Tracer – 对 VLAN 实施进行故障排除 – 方案 1 地址分配表 设备 接口 IP 地址 子网掩码 交换机端口 VLAN PC1 NIC 172.17.10.21 255.255.255.0 S2 F0/11 10 PC2 NIC 172.17.20.22 255.255.255.0 S2 F0/18 20 PC3 NIC 172.17.30.23 255.255.255.0…...

五、c++学习(加餐1:汇编基础学习)
经过前面几节课的学习,我们在一些地方都会使用汇编来分析,我们学习汇编,只是学习一些基础,主要是在我们需要深入分析语法的时候,使用汇编分析,这样会让我们更熟悉c编译器和语法。 从这节课开始,…...
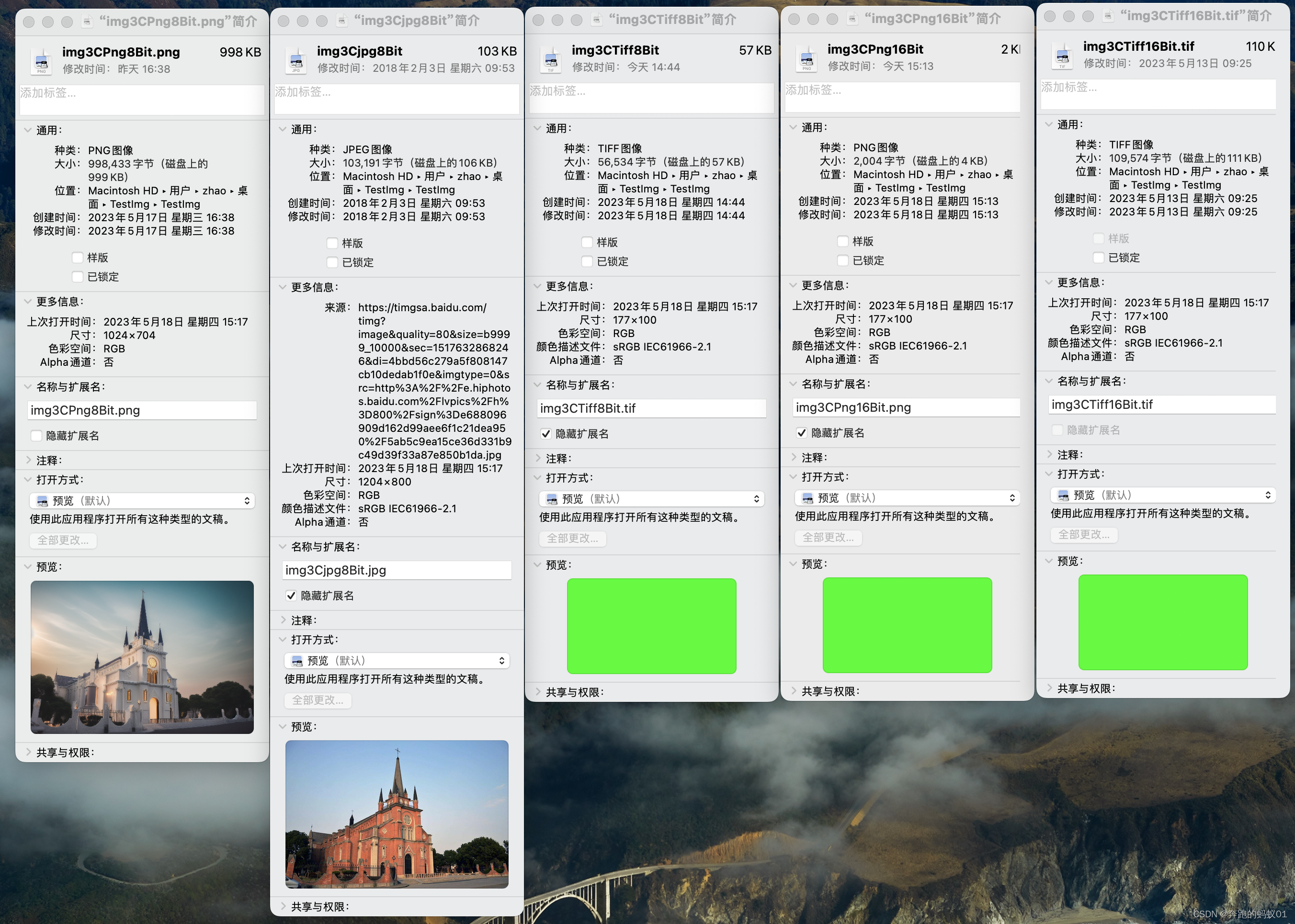
iOS正确获取图片参数深入探究及CGImageRef的使用(附源码)
一 图片参数的正确获取 先拿一张图片作为测试使用 图片参数如下: 图片的尺寸为: -宽1236个像素点 -高748个像素点 -色彩空间为RGB -描述文件为彩色LCD -带有Alpha通道 请记住这几个参数,待会儿我们演示如何正确获取。 将这张图片分别放在…...

Typescript 5.0 发布:快速概览
探索最令人兴奋的功能和更新 作为一种不断发展的编程语言,TypeScript 带来了大量的改进和新功能。在本文中,我们将深入探讨 TypeScript 的最新版本 5.0,并探索其最值得关注的更新。 1. 装饰器 TypeScript 5.0 引入了一个重新设计的装饰器系…...

【图像处理 】卡尔曼滤波器原理
目录 一、说明 二、它是什么? 2.1 我们可以用卡尔曼滤波器做什么? 2.2 卡尔曼滤波器如何看待您的问题...
YOLOv5 实例分割入门
介绍 YOLOv5 目标检测模型以其出色的性能和优化的推理速度而闻名。因此,YOLOv5 实例分割模型已成为实时实例分割中最快、最准确的模型之一。 在这篇文章中,我们将回答以下关于 YOLOv5 实例分割的问题: YOLOv5检测模型做了哪些改动,得到了YOLOv5实例分割架构?使用的 Prot…...

数字城市发展下的技术趋势,你知道多少?
提到数字城市、智慧城市大家都会感觉经常在耳边听到,但是要确切说出具体的概念还是有一点难度的。具体来说:数字城市是一个集合多种技术的系统,以计算机技术、多媒体技术和大规模存储技术为基础,以宽带网络为纽带,运用…...
linux 串口改为固定
在/etc/udev/rules.d 目录下新建定义规则的文件 1. 文件名要按规范写否则改动无效2. 规则文件必须以.rules 结尾3. 规则文件名称必须遵循 xx-name.rules 格式(xx 为数字或字母,name 为规则名称),例如 99-serial-ports.rules。4. 规…...
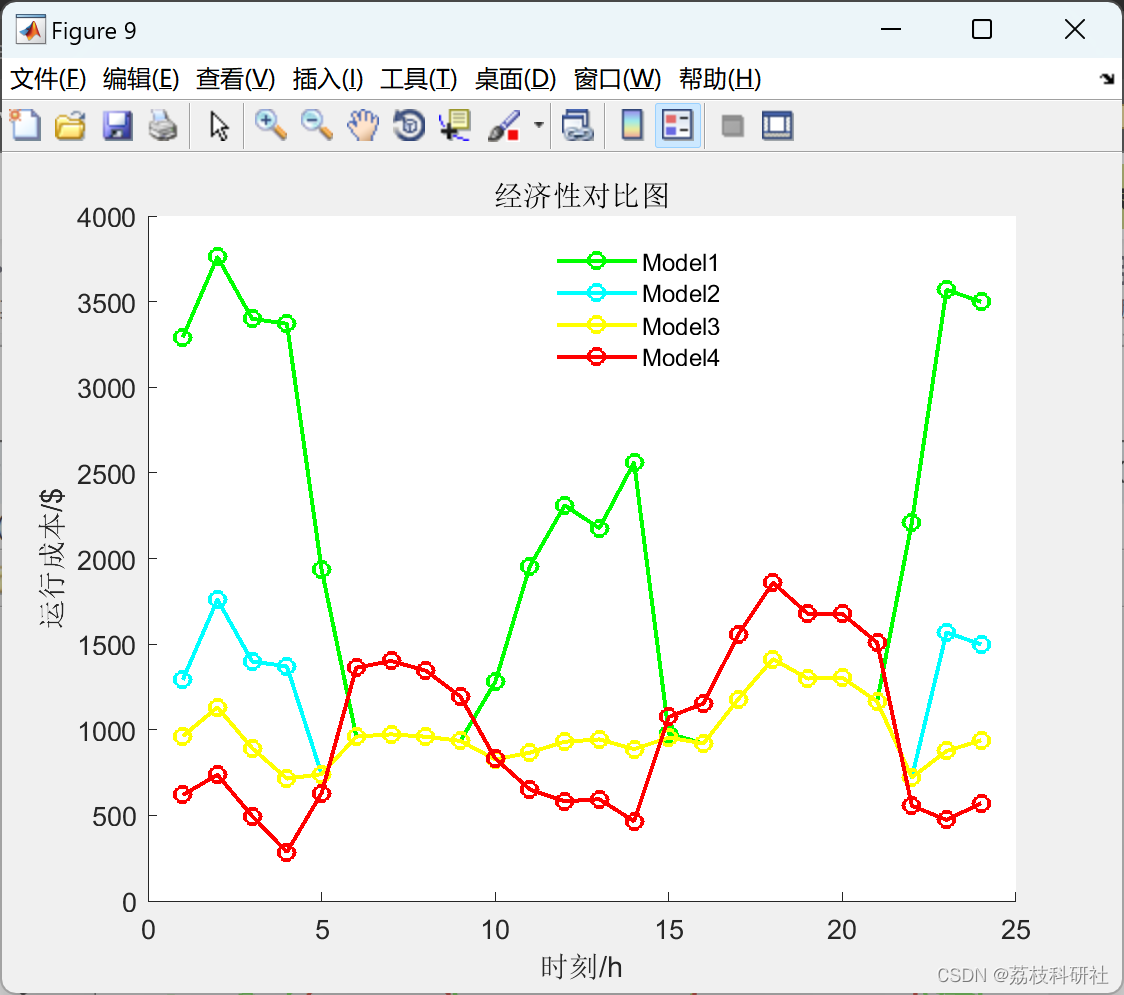
【SCI一区】考虑P2G和碳捕集设备的热电联供综合能源系统优化调度模型(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
Redis缓存数据库(四)
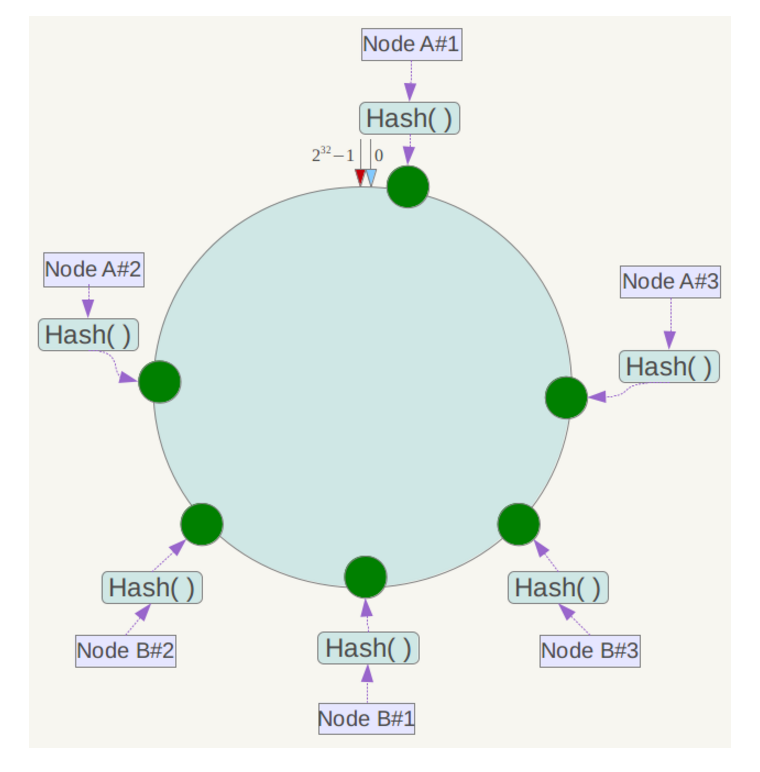
目录 一、概述 1、Redis Sentinel 1.1、docker配置Redis Sentinel环境 2、Redis存储方案 2.1、哈希链 2.2、哈希环 3、Redis分区(Partitioning) 4、Redis面试题 一、概述 1、Redis Sentinel Redis Sentinel为Redis提供了高可用解决方案。实际上这意味着使用Sentinel…...

View中的滑动冲突
View中的滑动冲突 1.滑动冲突的种类 滑动冲突一般有3种, 第一种是ViewGroup和子View的滑动方向不一致 比如: 父布局是可以左右滑动,子view可以上下滑动 第二种 ViewGroup和子View的滑动方向一致 第三种 第三种类似于如下图 2.滑动冲突的解决方式 滑动冲突一般情况下有2…...
java boot项目基础配置之banner与日志配置演示 并教会你如何使用文档查看配置
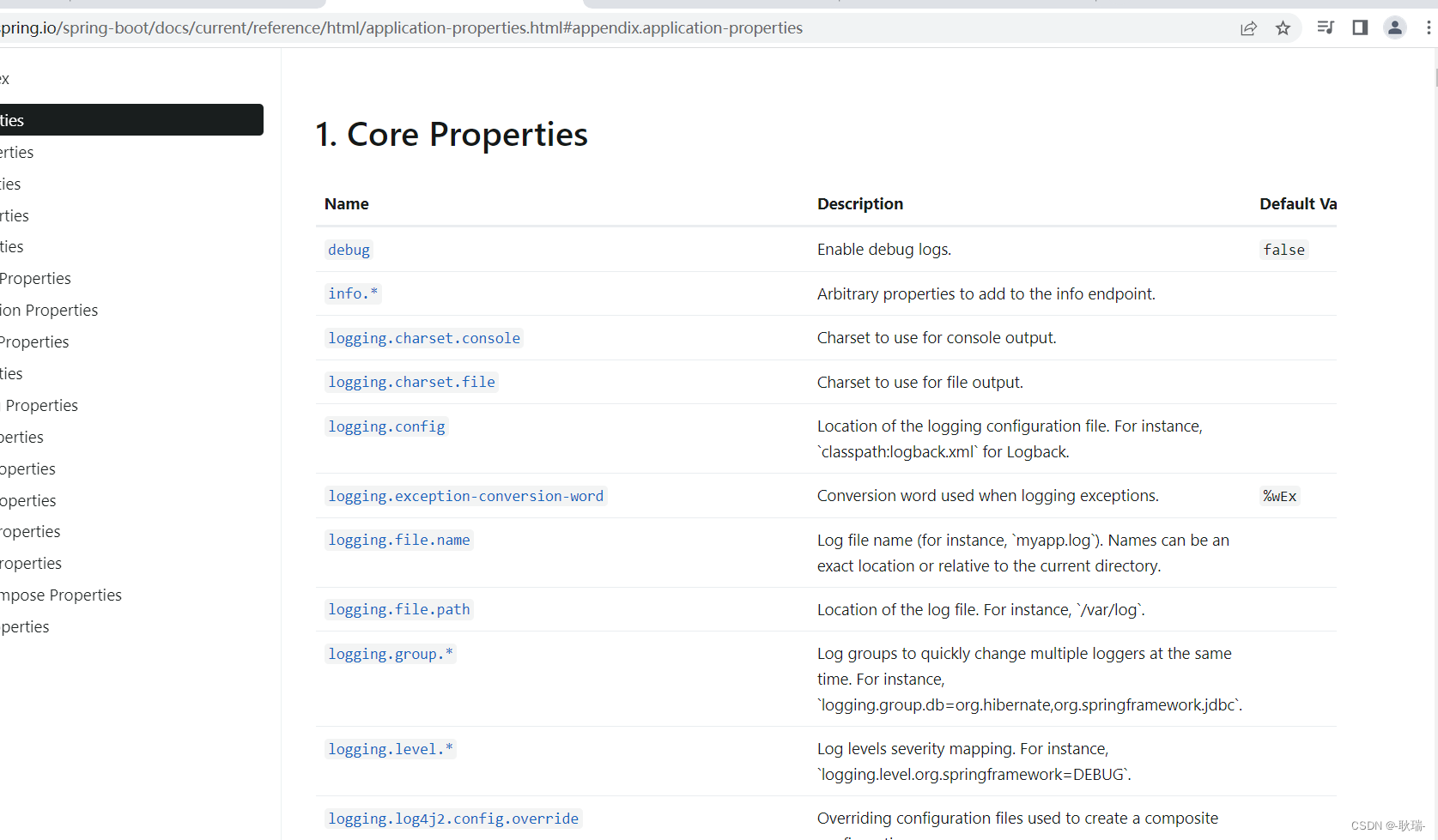
上文 我们简单讲了一下 springboot 项目的配置 都是写在resources下的application.properties中 springboot 项目中 配置都写在这一个文件 可以说非常方便 不像之前 写个项目配置这里一个哪里一个 看到是非常费力 我们启动项目 这里有个图案 其实 这叫 banner 我们就用配置来…...
蓝鲸平台通过标准运维 API 安装 Agent
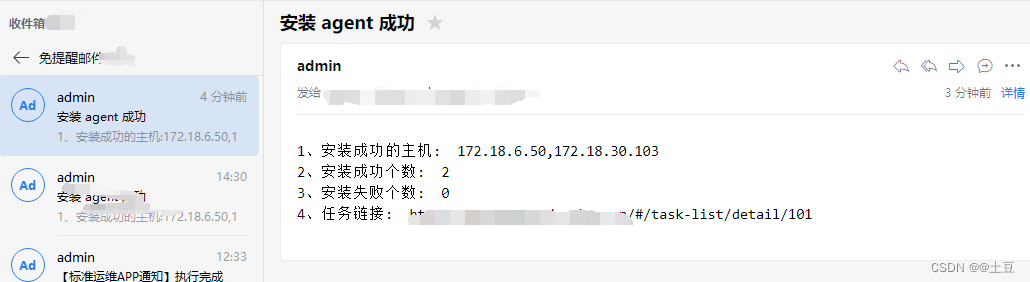
目录 一、背景 二、目的 三、创建安装agent流程 四、通过标准运维 API 安装 Agent 五、总结 一、背景 蓝鲸平台正常情况纳管主机需要在节点管理手工安装agent,不能达到完成自动化安装agent的效果。想通过脚本一键安装agent,而不需要在蓝鲸平台进行过…...

python 图片保存成视频
👨💻个人简介: 深度学习图像领域工作者 🎉工作总结链接:https://blog.csdn.net/qq_28949847/article/details/128552785 链接中主要是个人工作的总结,每个链接都是一些常用demo,…...

uniapp 引入 Less SCSS
✨求关注~ 😀博客:www.protaos.com 本文将介绍如何在 UniApp 中引入 Less 和 SCSS,两种流行的 CSS 预处理器。通过使用 Less 和 SCSS,你可以在 UniApp 项目中更灵活地编写样式,并享受预处理器提供的便利功能。 代码实现…...

Linux程序设计:文件操作
文件操作 系统调用 write //函数定义 #include <unistd.h> size_t write(int fildes, const void *buf, size_t nbytes); //示例程序 #include <unistd.h> #include <stdlib.h> int main() { if ((write(1, “Here is some data\n”, 18)) ! 18)write(2, …...

【自制C++深度学习推理框架】Tensor模板类的设计思路
Tensor模板类的设计思路 为什么要把Armadillo线性代数库arma::fcube封装成Tensor模板类? arma::fcube是Armadillo线性代数库中的一种数据类型,它是一个三维的float类型张量。Armadillo库是一个C科学计算库,提供了高效的线性代数和矩阵运算。…...
linux--systemd、systemctl
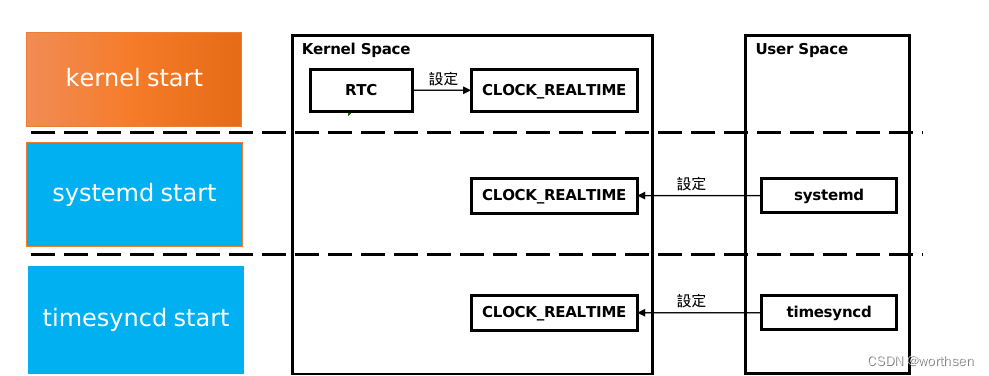
linux--systemd、systemctl 1 介绍1.1 发展sysvinitupstart主角 systemd 登场 1.2 简介 2 优点兼容性启动速度systemd 提供按需启动能力采用 linux 的 cgroups 跟踪和管理进程的生命周期启动挂载点和自动挂载的管理实现事务性依赖关系管理日志服务systemd journal 的优点如下&a…...

从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤
从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤在当今数据驱动的时代,对象存储已成为现代应用架构中不可或缺的一部分。MinIO作为高性能、兼容S3协议的开源对象存储解决方案,凭借其轻量级和易用性赢得了众多…...

2026在线测评系统十大量表对比:信效度与场景全解析
【30s 核心摘要】2026 年在线测评成人才管理刚需,信效度与场景适配成选型核心。本文聚焦十大量表,从信度、效度、适配场景等维度深度对比,重点解析问卷星、北森、金数据等主流平台的量表能力与落地效果,为企业、高校及机构提供科学…...

Simulink中Repeating Sequence锯齿波显示恒为0解决方案
锯齿波设置如图1时,其示波器显示恒为0(如图2)。图1图2于是新建模型,只添加Repeating Sequence模块,采用原始设置发现可以正常输出锯齿波,于是调整时间参数,发现当时间设置为≥[0 0.06]时可以正常…...

对比 Token Plan 与按量计费在 Taotoken 平台上的成本体感差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比 Token Plan 与按量计费在 Taotoken 平台上的成本体感差异 对于个人开发者或项目管理者而言,在接入大模型服务时&a…...

碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理
碧蓝航线自动化脚本终极指南:3小时学会全自动游戏管理 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为碧蓝…...

Codex使用API Key授权无法使用插件?
小伙伴们,大家好,我是小溪,见字如面。对于没有ChatGPT账号的小伙伴来说,虽然可以通过API Key授权的方式使用Codex桌面端,但是会有一些限制。比如无法使用插件功能,无法使用Codex移动端进行远程控制等。为了…...

基于Max78000与规则引导的音频数据集构建:边缘AI声音识别实战
1. 项目概述:当边缘AI遇见棕榈树里的“窃听者”在边缘计算和物联网设备大行其道的今天,我们常常面临一个核心矛盾:一方面,我们希望设备足够“聪明”,能实时识别并响应特定的声音模式,比如工厂里高压阀门的异…...

基于PGA2311的树莓派Hi-Fi模拟音量控制器设计与实现
1. 项目概述:为树莓派DAC打造的高品质模拟音量控制器玩过树莓派音频播放器的朋友都知道,用上像PCM1794A这类高性能DAC芯片后,音质确实能上一个台阶,但有个不大不小的麻烦:这类芯片本身不带音量控制。软件调音量&#x…...

正视孩童情绪波动,耐心陪伴平稳疏导
孩子的情绪就像夏天的天气,前一秒还晴空万里,后一秒可能就乌云密布。面对突如其来的哭闹、发脾气或者闷闷不乐,很多家长会急着“灭火”——要么讲道理,要么直接制止。但其实,情绪波动本身不是问题,它是孩子…...

如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造
如何快速上手Redux Dynamic Modules:5分钟完成Redux模块化改造 【免费下载链接】redux-dynamic-modules Modularize Redux by dynamically loading reducers and middlewares. 项目地址: https://gitcode.com/gh_mirrors/re/redux-dynamic-modules Redux Dyn…...