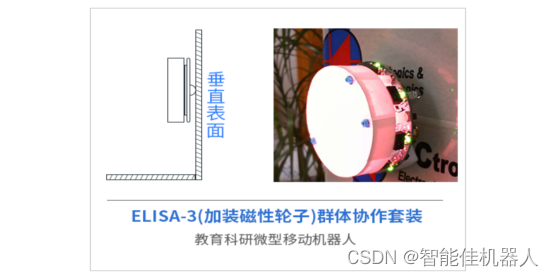
【无标题】ELISA-3(加装跟踪装置)—让群体协作更智能!
群体智能是近年来发展迅速的一个人工智能学科领域,通过对蚂蚁、蜜蜂等为代表的社会性昆虫群体行为的研究,实现分布式等智能行为。作为新一代人工智能的重要方向,群体智能通常用于无人机、机器人集群的协同作业。目前,群体智能在基础理论和关键技术应用上还处于初级阶段,仍然有广阔的应用和发展空间。科技部启动的《科技创新2030“新一代人工智能”重大项目指南》中,也将“群体智能”列为人工智能领域的五大持续攻关方向之一。可见,对于群体智能的探究具有重要的现实意义。北京智能佳科技有限公司除了基于EPUCK2机器人的群体协作系统外,还有体积更小巧的Elisa机器人群体协作。

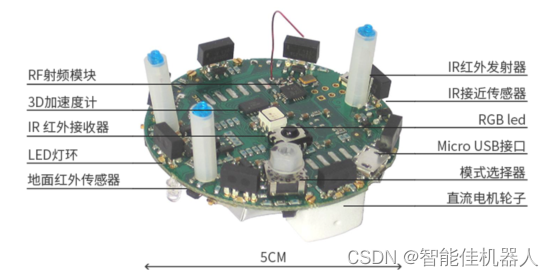
Elisa-3是 GCtronic 为研究和教育而设计的迷你移动机器人,它的直径为5厘米(EPUCK2 为7.5厘米),高度为3厘米,由于成本低,适合机器人爱好者使用。Elisa-3 机器人的灵感来自已在许多研究和教育机构中采用的 epuck 机器人。
第一个版本“Elisa-1”成功用于苏黎世联邦理工学院自治系统实验室与苏黎世迪士尼研究院共同开发的多机器人协作项目。
Elisa-3采用兼容Arduino 的Atmel微处理器,并具有大量传感器(IR 接近传感器、加速度计传感器、地面红外传感器)。Elisa-3可以停靠和自行充电。其自带的射频通模块信旨在实现同时实时控制多达100个机器人,适用于群体机器人开发。
Elisa-3硬件和软件是完全开源的,可以对每个电子设备进行底层访问,提供无限的扩展可能。


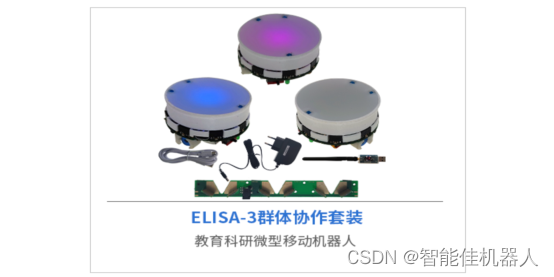
包装组件
| 名称 | 数量 |
|---|---|
| Elisa-3机器人 | 6 |
| 充电器,用于六台机器人 | 2 |
| 无线基站模块迷你USB电缆 | 1 |
| 红外摄像头和彩色摄像头 | 1 |
| 调试场地 | 1 |

产品规格
| 项目 | 详细信息 |
|---|---|
| 尺寸、重量 | 直径50mm,高度30mm,39g |
| 机械结构 | PCB、电机支架、用于漫射光的顶部白色塑料 |
| 电池、充电时间 | 锂聚合物充电电池(2 x 130mAh时,3.7V)。可以连续工作大约 3h,充电时间约 1h30min。 |
| 充电 | 2个充电触点,用于对接充电桩或通过 PC 或壁式插头的微型 USB充电 |
| 处理器 | Atmel ATmega2560 @ 8MHz(~ 8 MIPS)8位微控制器 |
| 存储 | 内存:8 KB;闪存:256 KB; EEPROM:4 KB |
| 电机 | 2个带25:1减速齿轮的直流电机;反电动势(back-EMF)控制速度 |
| 轮子(不带磁轮) | 磁吸,附着力约为1 N (100 g),取决于表面材料和油漆。车轮直径 = 9mm。车轮之间的距离= 40.8mm。 |
| 速度 | MAX值:60cm/s |
| 选择器 | 16位旋转开关和1个按钮 |
| 红外接近传感器 | 8个红外传感器测量环境光和物体,检测距离范围 4cm每个传感器彼此相距45° |
| 地面红外传感器 | 4个地面传感器,可巡线(放置在机器人的正前方) |
| LED | 机器人中央的1个 RGB LED,机器人周围有8个绿色 LED |
| 红外发射器 | 3个 IR 发射器(机器人前面 2 个,机器人后面 1 个) |
| 遥控接收器 | 用于标准遥控命令的红外线接收器 |
| 加速度计 | 沿 X、Y 和 Z 轴的 3D 加速度计 |
| 有线通信 | 通过micro USB的标准串行端口(最高38kbps),USB电缆(USB转串) |
| 无线通信 | 例如4个机器人为250Hz,100个机器人为 10Hz;通信距离高达10 m |
| 扩展总线 | 可选连接器:2 x UART、I2C、2 x PWM、VCC、GND、模拟和数字接口 |
| 编程 | 使用AVR-GCC 编译器(适用于 Windows 的 WinAVR)进行 C/C++ 编程免费编译器和 IDE (AVR Studio / Arduino) |
配置定位
- 打开4个机器人,并将它们放置在环境中心附近(将它们远离边界为了一个干净的开始);注意,所有机器人的选择器都在15位。
- 访问Elisa-3维基(http://www.gctronic.com/doc/index.php/Elisa-3#Tracking)并下载位置控制示例应用程序“水平位置控制(4个机器人)”(http://www.gctronic.com/doc/index.php/Elisa-3#Position_control). 将其提取到您的首选位置。
- 恢复SwisTrack并打开名为“elisa3-usb_4robots.SwisTrack”的配置文件包含在目录“swistrack/SwisTrackEnvironment”中(选择“文件 打开”并选择配置文件)。基本上,此配置文件包含相机和图像的设置处理用于跟踪机器人的部件;此外,它还指定发布跟踪信息到TCP端口3000。
- 单击顶部的“运行”按钮启动SwisTrack处理。因为机器人没有然而,他们的红外发射器打开了,此时没有检测到机器人。不要担心,当位置控制将被执行,它们的IR将被打开并且机器人将被检测。
- 现在,您可以通过执行“位置控制模式-4机器人/bin/Debug/position-control-pattern-horizontal-4”来启动位置控制示例应用程序-robots.exe”。应用程序将询问您要控制的机器人的4个地址,并将其传递给环境中已有机器人的地址。最初有一个校准阶段机器人将原地旋转,然后机器人应该开始按照正方形的形状移动。
- 在SwisTrack中,您可以选择“较近邻居跟踪”组件(单击它),以便在屏幕上查看跟踪结果。
跟踪
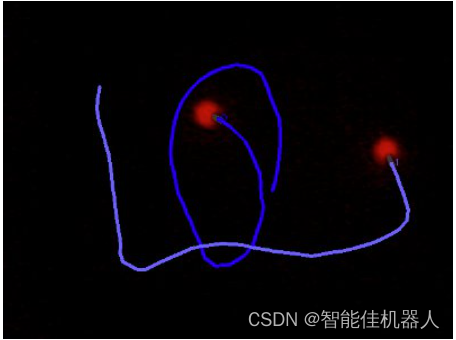
使用跟踪软件进行了一些实验,以便能够通过背面红外发射器跟踪Elisa-3机器人,以下是2个机器人的结果图像:
跟踪软件还可以让您轻松地记录生成的数据,然后您可以详细说明这些数据。以下是使用5个机器人进行的实验中的一个示例:
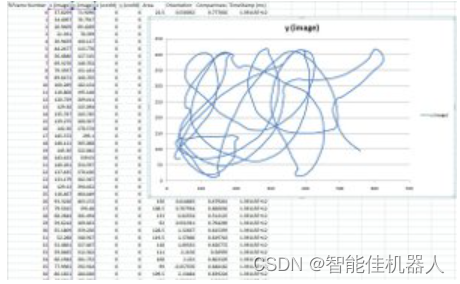
下面的视频展示了用20、30、38台Elisa-3机器人做的测试,跟踪效果还是不错的;重要的是要注意我们停止了 38 个 Elisa-3 机器人,因为我们实验室中有这些机器人。

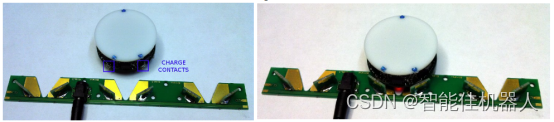
机器人充电
Elisa-3可以在充电站中引导,以便自动充电;充电时无需拔下电池。下图显示机器人接近充电站;led指示灯指示机器人充电:
当机器人电量不足时,微控制器会收到通知,该信息也会在标志字节中传输到PC;这让用户能够将机器人驾驶到充电站,并在它实际充电时得到通知。此外,当微型 USB 数据线连接到计算机时,机器人也会充电;请注意,如果USB 线连接到集线器,则需要为该集线器供电。

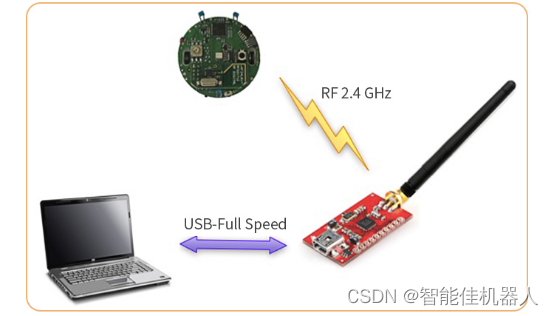
无线连接
无线电基站通过 USB 连接到 PC,并与机器人无线传输数据。同样,安装在机器人上的无线电芯片 ( nRF24L01+ ) 通过 SPI 与微控制器通信,并与 PC 无线传输数据。
机器人由存储在微控制器内部 EEPROM 的最后两个字节中的地址标识;机器人固件设置无线电模块从 EEPROM 读取地址。该地址与机器人下方标签上写的机器人 ID 相对应,不应更改。
编程
该机器人使用串行引导加载程序进行预编程。为了将新程序上传到机器人,需要一根微型 USB 数据线。与机器人的连接如图:

如果您使用的是 Arduino IDE,则无需遵循此过程,而是参阅Arduino IDE 项目部分。
如果您在编程过程中遇到一些问题(例如超时问题),您可以尝试按照以下顺序进行操作:打开机器人,将机器人从计算机上拔下,将机器人插入计算机,它会闪烁一些;当闪烁终止时再次执行编程命令。请注意,每次您需要对机器人重新编程时,您都需要拔下并重新插入计算机的电缆。
装配文件与安装效果
您可以从此处下载文档:
https://projects.gctronic.com/elisa3/tracking-doc.pdf

相关项目推荐


相关文章:
【无标题】ELISA-3(加装跟踪装置)—让群体协作更智能!
群体智能是近年来发展迅速的一个人工智能学科领域,通过对蚂蚁、蜜蜂等为代表的社会性昆虫群体行为的研究,实现分布式等智能行为。作为新一代人工智能的重要方向,群体智能通常用于无人机、机器人集群的协同作业。目前,群体智能在基…...
Dubbo源码解析一服务暴露与发现
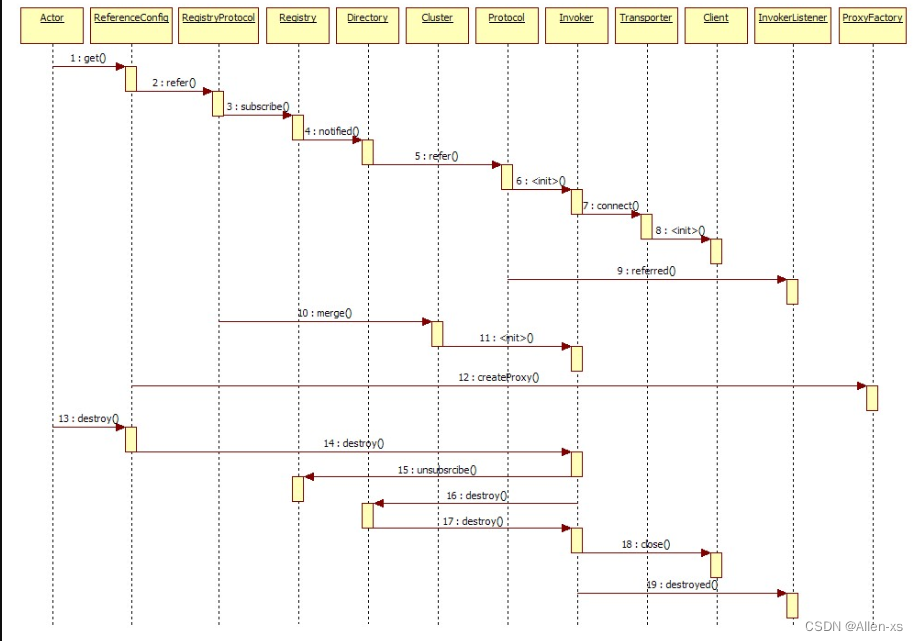
Dubbo 服务暴露与发现 1. Spring中自定义Schema1.1 案例使用1.2 dubbo中的相关对象 2. 服务暴露机制2.1 术语解释2.2 流程机制2.3 源码分析2.3.1 导出入口2.3.2 导出服务到本地2.3.3 导出服务到远程(重点)2.3.4 开启Netty服务2.3.5 服务注册2.3.6 总结 3. 服务发现3.1 服务发现…...
有哪些工具软件一旦用了就离不开?
💖前言 目前,随着科技的快速发展,电脑已经进入了许许多多人的生活 ,在平日的学习、工作和生活里,我们会用的各种各样的强大软件。市面上除了某些大公司开发在强大软件,还有各路大神开发具有某些功能的强大…...

ObjectARX如何判断点和多段线的关系
目录 1 基本思路2 相关知识点2.1 ECS坐标系概述2.2 其他点坐标转换接口2.3 如何获取多段线的顶点ECS坐标 3 实现例程3.1 接口实现3.2 测试代码 4 实现效果 在CAD的二次开发中,点和多段线的关系是一个非常重要且常见的问题,本文实现例程以张帆所著《Objec…...

四、DRF序列化器create方法与update方法
上一章: 二、Django REST Framework (DRF)序列化&反序列化&数据校验_做测试的喵酱的博客-CSDN博客 下一章: 五、DRF 模型序列化器ModelSerializer_做测试的喵酱的博客-CSDN博客 一、背景 1、创建请求,post,用户输入…...

洛谷P8792 最大公约数
[蓝桥杯 2022 国 A] 最大公约数 题目描述 给定一个数组,每次操作可以选择数组中任意两个相邻的元素 x , y x, y x,y 并将其中的一个元素替换为 gcd ( x , y ) \gcd(x, y) gcd(x,y),其中 gcd ( x , y ) \gcd(x, y) gcd(x,y) 表示 x x x 和 y…...
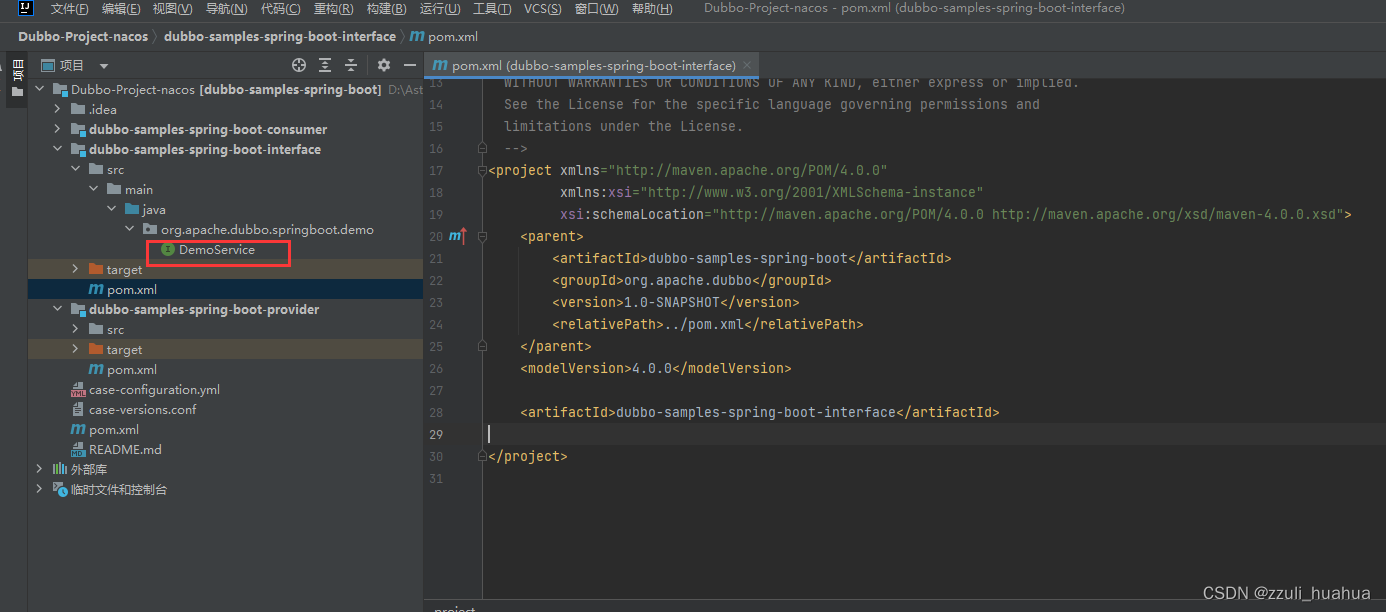
【SpringBoot集成Nacos+Dubbo】企业级项目集成微服务组件,实现RPC远程调用
文章目录 一、需求环境/版本 二、须知2.1、什么是RPC?2.2、什么是Dubbo?2.3、什么是Nacos? 三、普通的SpringBoot项目集成微服务组件方案(笔者给出两种)方案一(推荐)1、导入maven依赖࿰…...

MySQL主从同步(开GTID)
目录 一、搭建简单的主从同步 二、mysql删除主从(若没有配置过可以不用进行这一步) 1、停止slave服务器的主从同步 2、重置master服务 三、开启GTID 1、Master配置 2、Slave配置 一、搭建简单的主从同步 GTID原理:http://t.csdn.cn/g…...

打造精细化调研,这些产品榜上有名,你用了吗?
调查问卷是一种流行的数据收集工具,研究人员、营销人员和企业使用它来征求目标受众的反馈意见。调查问卷工具使创建、分发和分析调查问卷的过程变得更加简单和高效。想要做好一份调查问卷,选择一款好用的工具是少不了的。不过,在众多的问卷工…...
[golang gin框架] 37.ElasticSearch 全文搜索引擎的使用
一.全文搜索引擎 ElasticSearch 的介绍,以及安装配置前的准备工作 介绍 ElasticSearch 是一个基于 Lucene 的 搜索服务器,它提供了一个 分布式多用户能力的 全文搜索引擎,基于 RESTful web 接口,Elasticsearch 是用 Java 开发的,并作为 Apach…...

赋的几个发展阶段
赋,起源于战国,形成于汉代,是由楚辞衍化出来的,也继承了《诗经》讽刺的传统。关于诗和赋的区别,晋代文学家陆机在《文赋》里曾说: 诗缘情而绮靡,赋体物而浏亮。 也就是说,诗是用来抒发主观感情…...
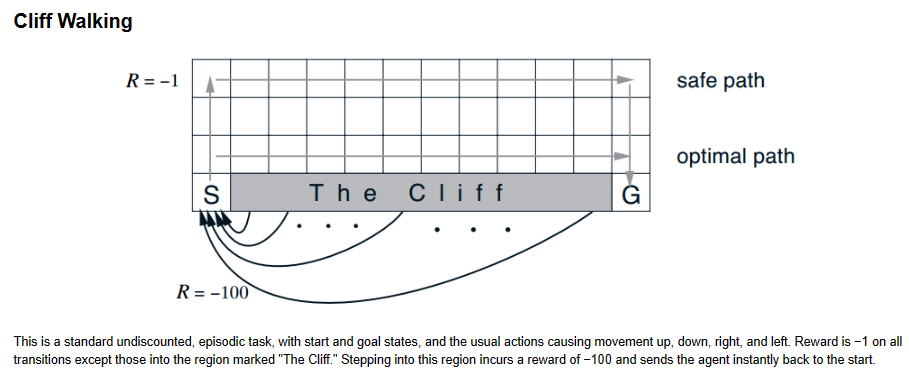
Model-Free TD Control: Sarsa
import time import random # 相对于Q 效果会差一些 class Env():def __init__(self, length, height):# define the height and length of the mapself.length lengthself.height height# define the agents start positionself.x 0self.y 0def render(self, frames50):fo…...
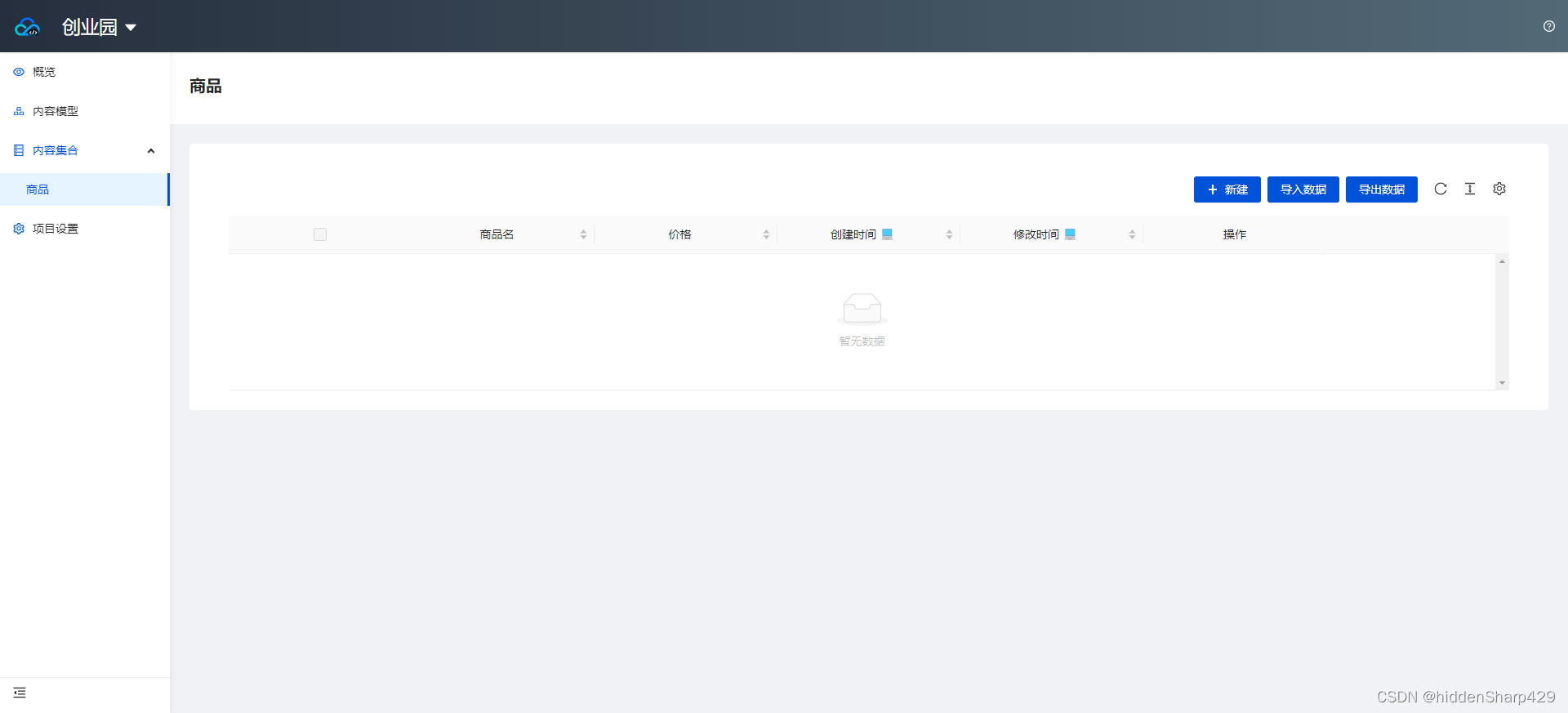
CloudBase CMS的开发注意事项
引言 在进行基于云开发的微信小程序开发时为了减轻工作量打算用CloudBase CMS来减轻工作量,随后去了解并体验了CloudBase CMS的使用,总体来说还有些许问题没有解决,对减轻后台管理工作并没有起到很大的作用。 项目情景 使用CloudBase CMS来管…...

大佬联合署名!反对 ACL 设置匿名期!
夕小瑶科技说 原创 作者 | 智商掉了一地、Python 近日,自然语言处理领域的多位知名学者联合发起了一项反对 ACL 设置匿名期的联合署名行动,包括著名学者 William Wang 和 Yoav Goldberg 在内,还有Christopher Potts、Hal Daume、Luke Zettl…...

【JavaSE】Java基础语法(十四):Static
文章目录 概述特点与应用注意事项为什么一个静态方法中只能访问用static修饰的成员? 概述 Java中的static是一个修饰符(也可称关键字),可以用于修饰变量、方法和代码块。 特点与应用 static修饰的成员具有以下特点: 被类的所有对…...

1.Linux初识
在 Linux 系统中,sudo 是一个重要的命令,可以允许普通用户以管理员权限来运行特定的命令。通过 sudo 命令,普通用户可以暂时获取管理员权限,执行需要管理员身份才能执行的操作。 下面是一些关于 sudo 命令的用法: 以管…...
进程(二)
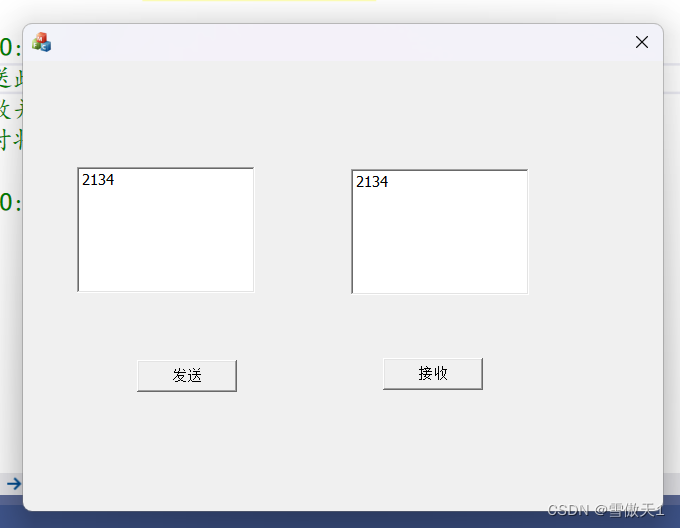
这一节我们写个MFC剪切板程序 1.下载相应的组件 工具->工具视图,因为之前已经下载过一部分了,这里如果创建MFC报错的话,就要把没下载的补上 此项目需要MFC库 解决方法 2.创建MFC程序 3.打开资源视图,直接在菜单栏顶部搜索…...
《消息队列高手课》课程笔记(二)
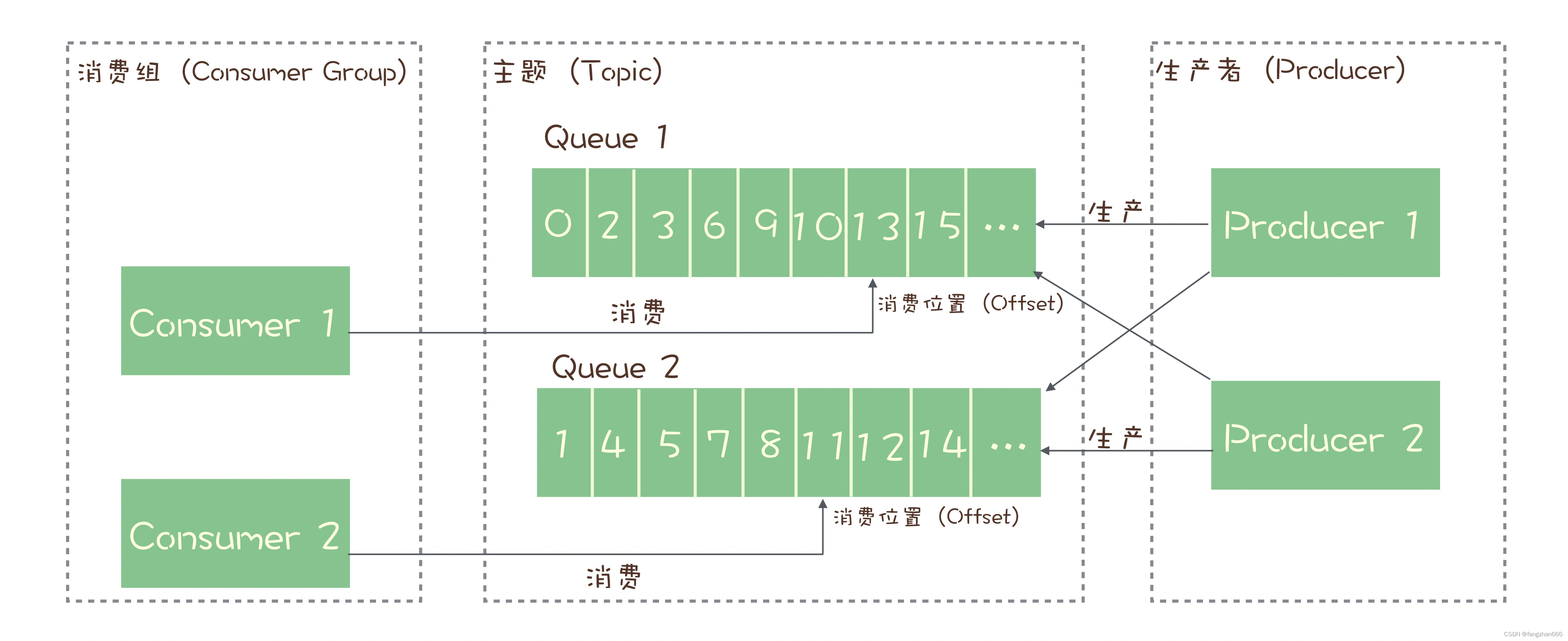
消息模型:主题和队列有什么区别? 两类消息模型 早期的消息队列,就是按照“队列”的数据结构来设计的。 生产者(Producer)发消息就是入队操作,消费者(Consumer)收消息就是出队也就是…...

以“智”提质丨信创呼叫
随着人工智能、大数据、云计算等新兴技术飞速发展,呼叫中心、全媒体智能客服等现已被广泛应用于多个行业领域。其中,呼叫中心作为政企对外服务的重要窗口,已从“传统电话营销”发展到“智能呼叫中心”阶段,以客户服务为核心&#…...

Pool与PG的说明以及Ceph的IO流程
Pool与PG的说明以及Ceph的IO流程 Pool与PG Ceph中的数据是以对象的形式存储在存储池(pool)中的。每个存储池都被划分为若干个存储组(PG),每个存储组同时也是一个数据分片(shard)。存储组是Ceph用来实现数据的分布式存储和高可用的重要组成部分。每个存储组包含若干…...

Godot PCK解包原理与专业逆向实践指南
1. 这不是“解压软件”,而是Godot游戏逆向工程的第一把手术刀你刚下载了一款用Godot引擎开发的独立游戏,想研究它的UI动效逻辑,或者复刻一段粒子特效,又或者只是单纯好奇——那个让你反复通关三次的像素风过场动画,图层…...

Buzz音频转录完全指南:3大核心功能+5个实战场景,快速掌握本地语音转文字技术
Buzz音频转录完全指南:3大核心功能5个实战场景,快速掌握本地语音转文字技术 【免费下载链接】buzz Buzz transcribes and translates audio offline on your personal computer. Powered by OpenAIs Whisper. 项目地址: https://gitcode.com/GitHub_Tr…...

DeepSeek代码质量评估实战手册:7步完成从混沌到可度量的质变跃迁
更多请点击: https://kaifayun.com 第一章:DeepSeek代码质量评估的底层逻辑与核心价值 DeepSeek代码质量评估并非简单地统计行数或检测语法错误,而是基于多维语义理解构建的推理系统。其底层逻辑融合了静态分析、符号执行与大语言模型生成式…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

告别拍脑袋规划!用ArcGIS做绿道选线:如何科学量化坡度、水域、道路成本并加权计算
科学规划绿道的ArcGIS高阶技法:从成本栅格构建到最优路径生成绿道规划从来不是简单的"两点之间直线最短",而是需要综合考虑地形、生态、人文等多维因素的复杂决策过程。传统规划中常见的"拍脑袋"决策方式,往往导致建成后…...

App Inventor蓝牙调试避坑指南:从连接失败到数据乱码,一次讲清所有常见问题
App Inventor蓝牙调试避坑指南:从连接失败到数据乱码的实战解决方案在移动应用开发领域,蓝牙通信一直是实现设备间短距离数据交换的核心技术之一。对于使用App Inventor的开发者而言,蓝牙模块提供了无需复杂编码即可实现无线通信的便捷途径。…...
Transient、QuickEye、VerifyEye傻傻分不清?一文讲透Ansys里三种眼图仿真方法的适用场景与避坑指南
Transient、QuickEye、VerifyEye深度解析:Ansys眼图仿真技术选型实战指南 在高速数字系统设计中,眼图分析是评估信号完整性的黄金标准。面对Ansys工具链中三种截然不同的眼图生成方法,工程师常常陷入选择困境——是追求精确度的传统瞬态分析&…...

AI圈神秘领袖Ilya一幅画引爆全网,OpenAI三件大事暗示AGI时代将至?
AI圈神秘精神领袖Ilya在Instagram上传一幅画引发疯狂解读,与此同时,OpenAI连续公布数学成果、升级Codex、筹备IPO,释放AGI到来的强烈信号。Ilya画作引猜测Ilya上传的画中,罗丹的「思考者」踩在芯片Die Shot上,右下角签…...

终极指南:5步快速掌握免费的3D点云标注工具labelCloud
终极指南:5步快速掌握免费的3D点云标注工具labelCloud 【免费下载链接】labelCloud A lightweight tool for labeling 3D bounding boxes in point clouds. 项目地址: https://gitcode.com/gh_mirrors/la/labelCloud 想要为自动驾驶、机器人视觉或3D目标检测…...

Hindsight API参考:REST接口完整文档
Hindsight API参考:REST接口完整文档 【免费下载链接】hindsight Hindsight: Agent Memory That Learns 项目地址: https://gitcode.com/GitHub_Trending/hindsight2/hindsight Hindsight是一个强大的Agent Memory系统,提供了全面的REST API接口&…...