使用原生的 JavaScript,不依赖于任何特定的库与 ROSBridge进行通信
使用原生的 JavaScript,不依赖于任何特定的库与 ROSBridge进行通信
创建与 ROS 的连接:
var rosbridge_url = "ws://localhost:9090";
var ws = new WebSocket(rosbridge_url);ws.onopen = function(event) {console.log('Connected to ' + rosbridge_url);
};ws.onerror = function(error) {console.log('WebSocket Error: ', error);
};ws.onclose = function(event) {console.log('Connection to ' + rosbridge_url + ' closed.');
};
发布一个话题:
var publishMessage = {op: 'publish',id: '1',topic: '/cmd_vel_mux/input/teleop',msg: {linear: {x: 1.0,y: 0.0,z: 0.0},angular: {x: 0.0,y: 0.0,z: 0.0}}
};ws.send(JSON.stringify(publishMessage));
订阅一个话题:
var subscribeMessage = {op: 'subscribe',id: '2',topic: '/odom',type: 'nav_msgs/Odometry'
};ws.send(JSON.stringify(subscribeMessage));ws.onmessage = function(event) {var response = JSON.parse(event.data);if (response.op === 'publish' && response.topic === '/odom') {console.log('Received message: ', response.msg);}
};
调用service服务:
var serviceCallMessage = {op: 'call_service',id: '3',service: '/add_two_ints',args: {a: 1,b: 2}
};ws.send(JSON.stringify(serviceCallMessage));ws.onmessage = function(event) {var response = JSON.parse(event.data);if (response.op === 'service_response' && response.id === '3') {console.log('Service response: ', response.values);}
};
调用 ROS Action 需要多个步骤,因为 action 包含 goal、feedback 和 result,且 action server 是由多个话题组成的:
// 发送目标
var actionGoalMessage = {op: 'publish',id: 'action_goal_1',topic: '/move_base/goal',msg: {goal_id: {id: 'goal_1'},goal: {target_pose: {// Fill in the details of the target pose.}}}
};ws.send(JSON.stringify(actionGoalMessage));// 订阅反馈
var actionFeedbackMessage = {op: 'subscribe',id: 'action_feedback_1',topic: '/move_base/feedback',
};ws.send(JSON.stringify(actionFeedbackMessage));// 订阅结果
var actionResultMessage = {op: 'subscribe',id: 'action_result_1',topic: '/move_base/result',
};ws.send(JSON.stringify(actionResultMessage));ws.onmessage = function(event) {var response = JSON.parse(event.data);if (response.op === 'publish' && response.topic === '/move_base/feedback') {console.log('Action feedback: ', response.msg);} else if (response.op === 'publish' && response.topic === '/move_base/result') {console.log('Action result: ', response.msg);}
};
在 rosbridge 的设计中,它是作为一个 ROS 的客户端,可以通过它订阅和发布话题、调用和提供服务、发送和接收 action 目标和反馈。但是,从设计上来看,rosbridge 并没有提供作为 ROS 服务或 action 服务器的功能。
服务端通常是由具体的 ROS 节点(通常是 Python 或 C++ 脚本)实现的,它们直接与 ROS 核心进行通信,提供实际的服务逻辑。
如果你希望在 JavaScript 环境中实现一个服务端,你可能需要使用一个可以直接与 ROS 核心通信的 JavaScript 库(例如 rosnodejs),而不是使用 rosbridge。rosbridge 的目标是提供一个方便的接口,使得在浏览器或其他 WebSocket 支持的环境中的应用可以与 ROS 进行通信,而不是直接实现 ROS 节点。
在 ROSBridge 的协议中,id 字段通常用来关联请求和响应。这个字段在调用服务或者订阅/取消订阅主题的时候通常会被用到。你可以为每个请求分配一个唯一的 id,然后当你收到来自 ROSBridge 的响应时,这个 id 会被包含在响应中,这样你就可以知道这个响应是对哪个请求的回应。
例如,当你发送一个调用服务的请求时,你可以包含一个 id 字段:
var serviceCallMessage = {op: 'call_service',id: 'service_call_1',service: '/add_two_ints',args: {a: 1,b: 2}
};
然后当你收到 ROSBridge 的响应时,这个 id 会被包含在响应中:
ws.onmessage = function(event) {var response = JSON.parse(event.data);if (response.op === 'service_response' && response.id === 'service_call_1') {console.log('Service response: ', response.values);}
};
通过这种方式,即使你同时发送了多个服务调用请求,你也能准确地知道每个响应对应的是哪个请求。
参考博客:
https://blog.csdn.net/lovely_yoshino/article/details/105324257?spm=1001.2014.3001.5506
相关文章:

使用原生的 JavaScript,不依赖于任何特定的库与 ROSBridge进行通信
使用原生的 JavaScript,不依赖于任何特定的库与 ROSBridge进行通信 创建与 ROS 的连接: var rosbridge_url "ws://localhost:9090"; var ws new WebSocket(rosbridge_url);ws.onopen function(event) {console.log(Connected to rosbri…...
MATLAB第十章_图像处理算法
目录 图像处理算法 图像处理基础 图像处理函数 默认显示方式 添加颜色条 显示多帧图像 显示动画 三维材质图像 图像的直方图 灰度变换 均衡直方图 图像处理应用 图像增强 图像重建 图像变换 图像压缩 图像分割 图像边缘检测 图像识别 图像处理算法 图像处理…...
RobotFramework接口测试方案
1. Robot FrameWork介绍 1.1 介绍 Robot Framework是用于验收测试和回归测试的通用测试自动化框架。它使用易于理解的表格数据语法,非常友好的实现了关键字驱动和数据驱动模式。它的测试功能可以通过使用Python或Java实现的测试库进行扩展,用户可以使用…...

chatgpt赋能python:Python中日期转换:从字符串到日期对象
Python中日期转换:从字符串到日期对象 作为一个经验丰富的Python工程师,日期转换在我的日常编码工作中经常遇到。Python提供了一些内置函数和模块,可以将字符串转换为日期对象或将日期对象格式化为特定的字符串。本篇文章将带您深入了解Pyth…...
)
k8s 1.27新特性in-place使用方法:避坑指南(官方文档有坑,已提issue)
背景 按照官方文档试用新版的in-place特性时,一字不差地执行了,但是却出现了执行失败的情况: 执行kubectl -n qos-example patch pod qos-demo-5 --patch {"spec":{"containers":[{"name":"qos-demo-ct…...
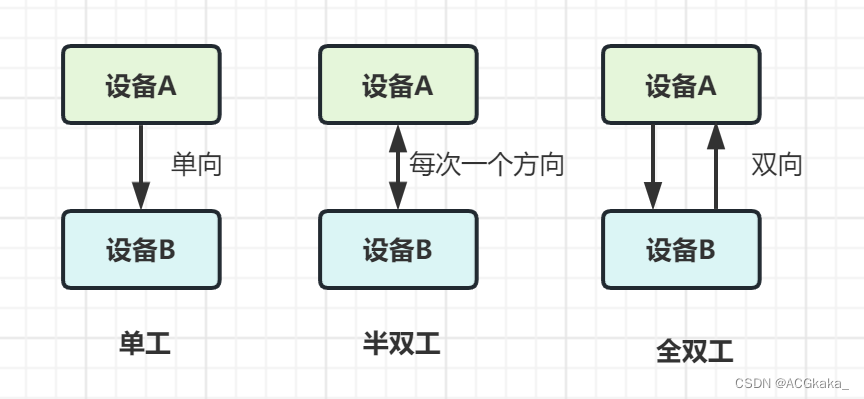
网络传输(传输介质、通信方式、交换方式)
目录 一、传输介质1.双绞线2.网线安装3.光纤4.无线信道 二、通信方式、交换方式1.通信方式2.同步方式3.交换方式 一、传输介质 1.双绞线 双绞线:将多根铜线按规则缠绕在一起,能够减少干扰;分为无屏蔽双绞线UTP和屏蔽双绞线STP,都…...

【Unity】Time.deltaTime有什么用?看完你就明白
大多数刚开始使用 Unity 的人(包括我),都会对Time.deltaTime感到迷惑。 看完本文,你就会明白Time.deltaTime的定义及作用。 1、deltaTime是什么? 根据定义,Time.deltaTime是每一帧之间的时间间隔(以秒为单位)。 这有助于我们使游戏与帧数无关,也就是说,无论 fps 是…...
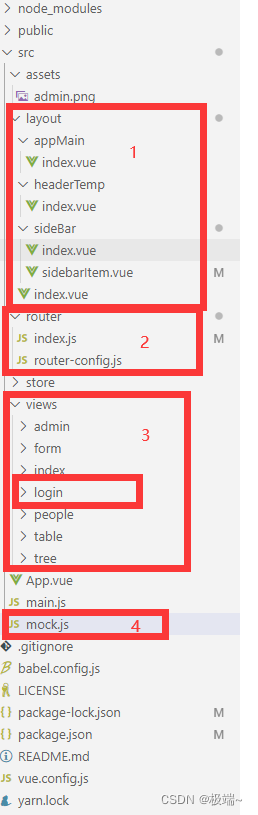
vue实现用户动态权限登录
一、使用vueelementUI搭登录框架,主要就是1、2、3、4 配置: ①vue.config.js use strict const path require(path)function resolve(dir) {return path.join(__dirname, dir) }// All configuration item explanations can be find in https://cli.v…...

ONNX模型修改为自定义节点
参考一 首先,需要将ONNX模型中的节点修改为自定义节点。要实现这一点,您需要了解自定义节点的定义和如何在ONNX中使用它们。ONNX定义了一个自定义运算符的接口,您可以使用该接口定义自己的运算符,并将其编译为ONNX模型可以识别的…...

内存对齐原则
struct (1)结构体第一个数据成员放在offset为0的地方,后面每个成员相对于结构体首地址的偏移量(offset)都是成员大小(该变量类型所占字节)的整数倍,如有需要编译器会在成员之间加上填…...
Java SPI 一 之SPI(Service Provider Interface)进阶 AutoService
一、SPI(Service Provider Interface) 1.1 介绍 SPI(Service Provider Interface),是JDK内置的一种 服务提供发现机制(为某个接口寻找服务实现的机制),可以用来启用框架扩展和替换组件,其…...

C++ list类成员函数介绍
目录 🤔list模板介绍: 🤔特点: 🤔list内存结构图解: 🤔 list的成员函数: 😊list构造函数: 🔍代码示例: 🔍运行结果&…...

【服务器】本地搭建PHP简单Imagewheel私人云图床
文章目录 1.前言2. Imagewheel网站搭建2.1. Imagewheel下载和安装2.2. Imagewheel网页测试2.3.cpolar的安装和注册 3.本地网页发布3.1.Cpolar临时数据隧道3.2.Cpolar稳定隧道(云端设置)3.3.Cpolar稳定隧道(本地设置) 4.公网访问测…...

第四十二回:DateRangePickerDialog Widget
文章目录 概念介绍使用方法示例代码 我们在上一章回中介绍了DatePickerDialog Widget相关的内容,本章回中将介绍 DateRangePickerDialog Widget.闲话休提,让我们一起Talk Flutter吧。 概念介绍 我们在这里说的DateRangePickerDialog是一种弹出窗口,只不…...
【C++系列P3】‘类与对象‘-三部曲——[基础知识](1/3)
前言 大家好吖,欢迎来到 YY 滴 C系列 ,热烈欢迎! 【 类与对象-三部曲】的大纲主要内容如下: 如标题所示,本章是【 类与对象-三部曲】三章中的第一章节——基础知识章节,主要内容如下: 目录 一.…...

Android UEvent事件分析之Kernel上报电量
kernel-4.4\drivers\power\power_supply_core.c 当电量信息需要更新的时候,kernel会调用power_supply_changed_work这个工作队列,使用kobject_uevent函数往上发送uevent事件,action是KOBJ_CHANGE; static void power_supply_changed_work(struct work_struct *work) {uns…...

C++ vector模板和deque的简单应用
目录 🤔vector模板和deque的简单介绍: 🤔vector和deque的主要不同之处: 🤔今天我们用vector模板和deque模板实现以下简单的功能: 代码实现: 🤔讲解: 🤔vector模板和d…...
声明式事务控制
声明式事务控制 编程式事务控制相关对象 PlatformTransactionManager PlatformTransactionManager接口是spring的事务管理器,它里面提供了常用的操作事务的方法 方法说明TransactionStatus getTransaction(TransactionDefaultion defination)获取事务的状态信息…...

cisp pte模拟题
1.信息搜集 本题共三个key 端口 1433 27689 存活ip 192.168.85.137 2.访问网站27689进行信息搜集 一个登录框,sql注入失败,暴力破解失败 扫描目录 发现三个文件robots.txt ,web.config 除了robots.txt,其他都访问不了 访问robots.txt,发现一个file参数…...

Docker容器 和 Kubernetes容器集群管理系统
一、快速了解Docker 1. 什么是Docker的定义 Docker 是一个开源的应用容器引擎,基于Go语言并遵从 Apache2.0 协议开源。Docker 可以让开发者打包他们的应用以及依赖包到一个轻量级、可移植的容器中,然后发布到任何流行的 Linux 机器上,也可以…...

QMCDecode终极指南:3步解锁QQ音乐加密格式,实现跨平台音乐自由
QMCDecode终极指南:3步解锁QQ音乐加密格式,实现跨平台音乐自由 【免费下载链接】QMCDecode QQ音乐QMC格式转换为普通格式(qmcflac转flac,qmc0,qmc3转mp3, mflac,mflac0等转flac),仅支持macOS,可自动识别到QQ音乐下载目…...

从CTF题看RSA安全:为什么你的密钥不能‘共享素数’?
从CTF实战看RSA密钥安全:那些年我们踩过的坑 在网络安全竞赛和实际渗透测试中,RSA算法的错误实现方式往往成为突破的关键点。本文将通过典型CTF赛题案例,揭示五种常见RSA实现漏洞背后的数学原理和安全启示,帮助开发者在实际项目中…...

MeloTTS实战:多语言语音合成的高效解决方案
MeloTTS实战:多语言语音合成的高效解决方案 【免费下载链接】MeloTTS High-quality multi-lingual text-to-speech library by MyShell.ai. Support English, Spanish, French, Chinese, Japanese and Korean. 项目地址: https://gitcode.com/GitHub_Trending/me/…...

3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程
3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经下载了网易云音乐的歌曲&a…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...

Unity塔防底层架构:ScriptableObject驱动的数据契约设计
1. 这不是“又一个塔防模板”,而是塔防开发的底层操作系统我第一次在Asset Store点开Tower Defense Toolkit 4(TDTK-4)的预览图时,下意识划走了——界面太“干净”了,没有炫酷的粒子特效演示,没有满屏飞舞的…...

Lovable电商网站搭建:如何用不到3人技术团队,72小时内上线PCI-DSS合规MVP版本?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署能力。本章将指导你从零开始搭建一个具备商品展示、…...

别再盲调temperature=0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单
更多请点击: https://intelliparadigm.com 第一章:别再盲调temperature0.2!DeepSeek补全效果突变的4个隐藏参数,资深架构师压箱底调参清单 DeepSeek-R1/VL 等开源大模型在实际部署中,仅靠调节 temperature 往往收效甚…...

Unity中实现深度遮挡:LingBot-Depth实战接入与优化
1. 这不是“加个插件就完事”的AR效果——为什么LingBot-Depth在Unity里值得专门写一篇实战教程你肯定见过那种AR应用:虚拟椅子摆在真实地板上,但当你绕到椅子后面,它依然完整显示,完全无视身后那堵真实的墙;或者一只3…...

如何永久保存微信聊天记录?WeChatMsg终极数据导出指南
如何永久保存微信聊天记录?WeChatMsg终极数据导出指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeCha…...