( 链表) 142. 环形链表 II——【Leetcode每日一题】
❓142. 环形链表 II
难度:中等
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。如果 pos 是 -1,则在该链表中没有环。注意:pos 不作为参数进行传递,仅仅是为了标识链表的实际情况。
不允许修改 链表。
示例 1:
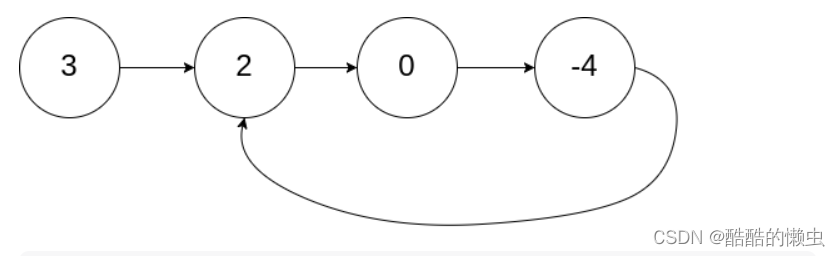
输入:head = [3,2,0,-4], pos = 1
输出:返回索引为 1 的链表节点
解释:链表中有一个环,其尾部连接到第二个节点。
示例 2:

输入:head = [1,2], pos = 0
输出:返回索引为 0 的链表节点
解释:链表中有一个环,其尾部连接到第一个节点。
示例 3:

输入:head = [1], pos = -1
输出:返回 null
解释:链表中没有环。
提示:
- 链表中节点的数目范围在范围 [ 0 , 1 0 4 ] [0, 10^4] [0,104] 内
- − 1 0 5 < = N o d e . v a l < = 1 0 5 -10^5 <= Node.val <= 10^5 −105<=Node.val<=105
pos的值为-1或者链表中的一个有效索引
进阶:你是否可以使用 O ( 1 ) O(1) O(1) 空间解决此题?
💡思路:快慢指针
我们使用两个指针,slow 与 fast,它们起始分别指向链表的头部head 和头部的下一个节点head.next:
- 随后,
slow指针每次向后移动一个位置,而fast指针向后移动两个位置。 - 如果链表中存在环,则
fast指针最终将再次与slow指针在环中相遇。
如下图所示,设链表中环外部分的长度为 a。slow 指针进入环后,又走了 b 的距离与 fast 相遇。此时,fast 指针已经走完了环的 n 圈,因此它走过的总距离为: a + n ( b + c ) + b a+n(b+c)+b a+n(b+c)+b
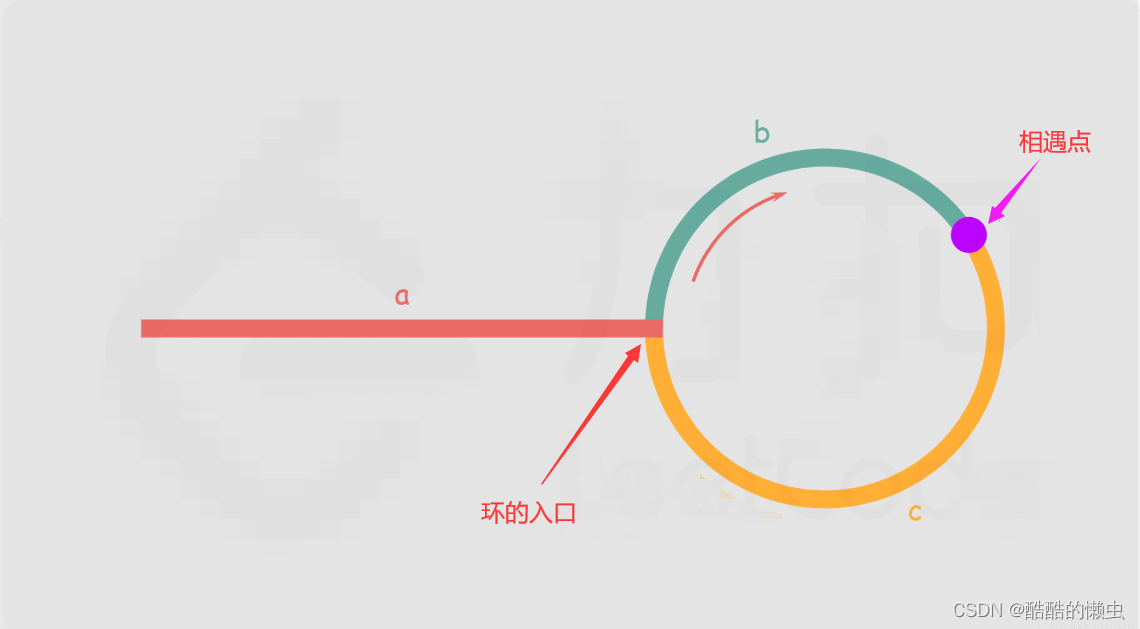
根据题意,任意时刻,fast指针走过的距离都为 slow 指针的 2 倍。因此,我们有
a + ( n + 1 ) b + n c = 2 ( a + b ) a+(n+1)b+nc=2(a+b) a+(n+1)b+nc=2(a+b)
整理得:
a = c + ( n − 1 ) ( b + c ) a=c+(n−1)(b+c) a=c+(n−1)(b+c)
我们会发现:从相遇点到入环点的距离加上 n−1 圈的环长,恰好等于从链表头部到入环点的距离。
因此,当发现 slow 与 fast 相遇后,我们让 fast 指向链表头部 head,slow 指向slow 的下一个:
- 随后,
fast和slow每次向后移动一个位置; - 最终,它们会在 入环点 相遇。
🍁代码:(Java、C++)
Java
/*** Definition for singly-linked list.* class ListNode {* int val;* ListNode next;* ListNode(int x) {* val = x;* next = null;* }* }*/
public class Solution {public ListNode detectCycle(ListNode head) {if(head == null) return null;ListNode slow = head;ListNode fast = head.next;while(fast != null && fast.next != null){if(slow == fast) break;slow = slow.next;fast = fast.next.next;}if(fast == null || fast.next == null) return null;fast = head;slow = slow.next;while(slow != fast){slow = slow.next;fast = fast.next;}return slow;}
}
C++
/*** Definition for singly-linked list.* struct ListNode {* int val;* ListNode *next;* ListNode(int x) : val(x), next(NULL) {}* };*/
class Solution {
public:ListNode *detectCycle(ListNode *head) {if(head == NULL) return NULL;ListNode* slow = head;ListNode* fast = head->next;while(fast != NULL && fast->next != NULL){if(slow == fast) break;slow = slow->next;fast = fast->next->next;}if(fast == NULL || fast->next == NULL) return NULL;fast = head;slow = slow->next;while(slow != fast){slow = slow->next;fast = fast->next;}return slow;}
};
🚀 运行结果:
🕔 复杂度分析:
- 时间复杂度: O ( n ) O(n) O(n),其中
n为链表中节点的数目。在最初判断快慢指针是否相遇时,slow指针走过的距离不会超过链表的总长度;随后寻找入环点时,走过的距离也不会超过链表的总长度。因此,总的执行时间为 O ( N ) + O ( N ) = O ( N ) O(N)+O(N)=O(N) O(N)+O(N)=O(N)。 - 空间复杂度: O ( 1 ) O(1) O(1),我们只使用了
slow,fast两个指针。
题目来源:力扣。
放弃一件事很容易,每天能坚持一件事一定很酷,一起每日一题吧!
关注我LeetCode主页 / CSDN—力扣专栏,每日更新!
注: 如有不足,欢迎指正!
相关文章:
( 链表) 142. 环形链表 II——【Leetcode每日一题】
❓142. 环形链表 II 难度:中等 给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。 如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定…...

论文解读 | 基于改进点对特征的点云6D姿态估计
原创 | 文 BFT机器人 01 摘要 点对特征(PPF)方法已被证明是一种有效的杂波和遮挡下的姿态估计方法。 文章的改进方法主要包括: (1)一种基于奇偶规则求解封闭几何的法向的方法; (2)通过将体素网格划分为等效角度单元的有效降采样方法; (3)基于拟合点的验证步骤。在真实杂波数据集…...

Shell脚本while循环语句应用
记录:433 场景:Shell脚本while循环语句应用。Shell脚本while循环语句应用。while do done、while : do done、while true do done。 版本:CentOS Linux release 7.9.2009。 1.while常用格式 1.1格式一:while do done while c…...

Kubernetes Dashboard + Ingress 及其 yaml 文件分析
概述 记录部署Dashboard Ingress的具体过程及其 yaml 文件分析 Dashboard Yaml # Copyright 2017 The Kubernetes Authors. # # Licensed under the Apache License, Version 2.0 (the "License"); # you may not use this file except in compliance with the Li…...
【SpringCloud组件——Nacos】
前置准备: 分别提供订单系统(OrderService)和用户系统(UserService)。订单系统主要负责订单相关信息的处理,用户系统主要负责用户相关信息的处理。 一、服务注册与发现 1.1、在父工程当中引入Nacos依赖 …...

pinia状态管理 用法
Pinia是一个用于vue的状态管理库,类似于vuex,是vue的另一种状态管理工具。 Pinia 是 Vue 的存储库,它允许跨组件/页面共享状态。实际上,Pinia就是Vuex的升级版,官网也说过,为了尊重原作者,所以取名pinia&am…...

Oracle客户端版本安装
一、版本准备 Oracle版本下载官网:Instant Client for Linux x86-64 (64-bit) | Oracle 中国 进入网站下载对应的oracle版本,通常环境所用的包有:basic、sdk、sdkplus三个包。包的类型分为rpm和zip包,均可以下载,当前…...

基于Android studio二手车交易系统app
客户端: 用户注册:通过输入用户名,密码,所在地,联系地址以及电话和电子邮件等信息进行用户信息的注册。 二手车查看:用户注册登录系统后,可以查看二手车的基本信息,通过二手车的品牌…...

【LCD应用编程】绘制点、线、矩形框
之前获取LCD屏幕参数信息时了解到,LCD屏是 FrameBuffer 设备,操作 FrameBuffer 设备 其实就是在读写 /dev/fb0 文件。除此之外,LCD屏上包含多个像素点,绘制点、线、矩形框本质是在修改这些像素点的颜色。 目录 1、定义 lcd_color…...
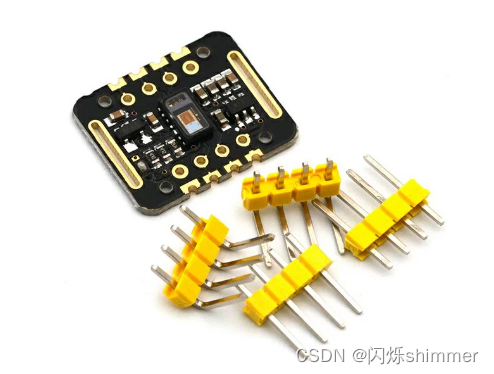
第八篇、基于Arduino uno,获取MAX30102心率传感器的心率信息——结果导向
0、结果 说明:先来看看串口调试助手显示的结果,第一个值是原始的IR值,第二个值是实时的心跳,第三个值是平均心跳,如果是你想要的,可以接着往下看。 1、外观 说明:MAX30102心率传感器的外观如下…...
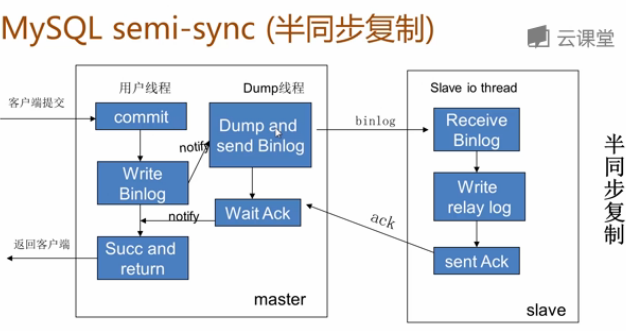
【MySQL】MySQL主从同步延迟原因与解决方案
文章目录 一、MySQL数据库主从同步延迟产生的原因二、关于DDL和DML三、主从延时排查方法四、解决方案3.1 解决从库复制延迟的问题:3.2 MySql数据库从库同步其他问题及解决方案 一、MySQL数据库主从同步延迟产生的原因 MySQL的主从复制都是单线程的操作,…...
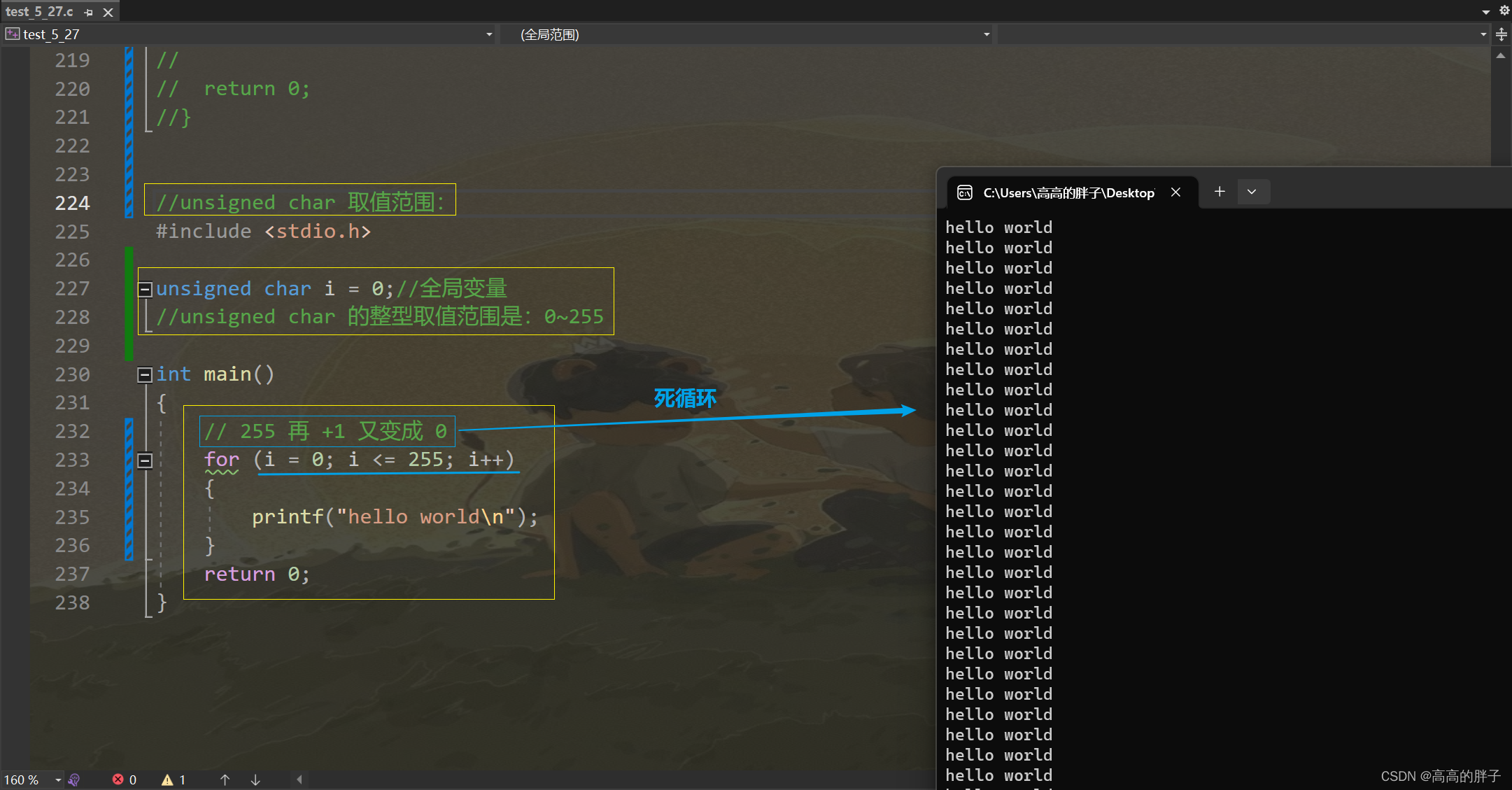
学C的第二十二天【深度剖析数据在内存中的存储:1. 数据类型介绍;2. 整型在内存中的存储】
相关代码gitee自取:C语言学习日记: 加油努力 (gitee.com) 接上期:学C的第二十一天【初阶测评讲解:1. 计算递归了几次;2. 判断 do while 循环执行了几次;3. 求输入的两个数的最小公倍数;4. 将一句话的单词进…...

测试计划模板一
测试计划 修订历史记录 版本 日期 AMD 修订者 说明 1.0 XXXX年XX月XX (A-添加,M-修改,D-删除) 目录 1. 简介.. 4 1. 1目的... 4 1. 2背景... 4...
【利用AI让知识体系化】5种创建型模式
文章目录 创建型模式简介工厂模式抽象工厂模式单例模式建造者模式原型模式 创建型模式 简介 创建型模式,顾名思义,是用来创建对象的模式。在软件开发中,对象的创建往往比一般的编程任务更为复杂,可能涉及到一些琐碎、复杂的过程…...

Unity的UnityStats: 属性详解与实用案例
UnityStats 属性详解 UnityStats 是 Unity 引擎提供的一个用于监测游戏性能的工具,它提供了一系列的属性值,可以帮助开发者解游戏的运行情况,从而进行优化。本文将详细介绍 UnityStats 的每个属性值,并提供多个使用例子帮助开发者…...

TDengine集群搭建
我这里用三台服务器搭建集群 1、如果搭建集群的物理节点上之前安装过TDengine先卸载清空,直接执行以下4条命令 rmtaos rm -rf /var/lib/taos rm -rf /var/log/taos rm -rf /etc/taos2、确保集群中所有主机开放端口 6030-6043/tcp,6060/tcp,…...

Android 12.0无源码apk设置默认启动Launcher的相关属性
1.概述 在12.0的系统产品开发中,对于一些产品的需求,需要将一些无源码app的某个MainActivity作为启动Launcher页面的功能实现,由于没有源码,所以需要 利用PMS的安装解析apk的AndroidManifest.xml的时候,在判断是某个Activity的时候,设置Lancher属性来实现某些功能 2.无源…...
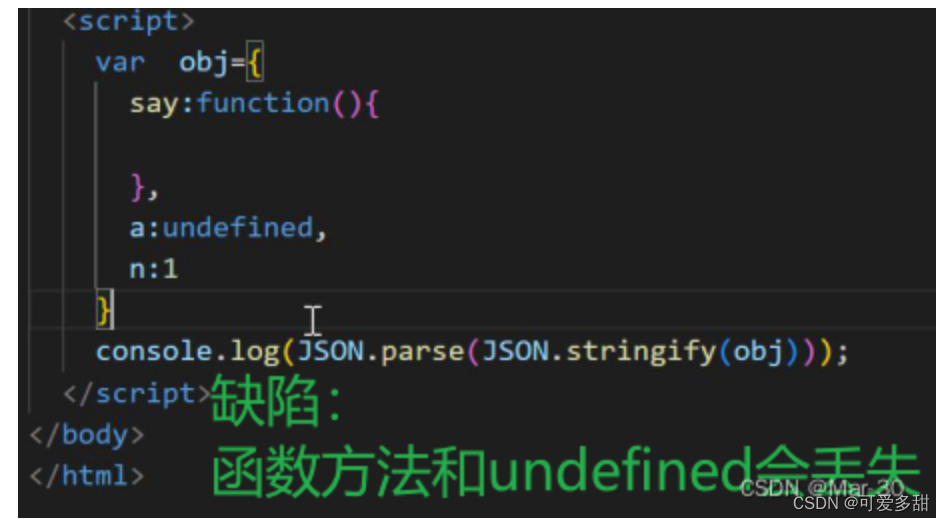
js深拷贝和浅拷贝
👉十分钟学会 前端面试题 js 深拷贝与浅拷贝_前端深拷贝和浅拷贝面试题_Mar-30的博客-CSDN博客 目录 背景: 概念:核心是创建新地址 方法: 浅拷贝: Object.assign() 方法:Object.assign(拷贝的对象&am…...
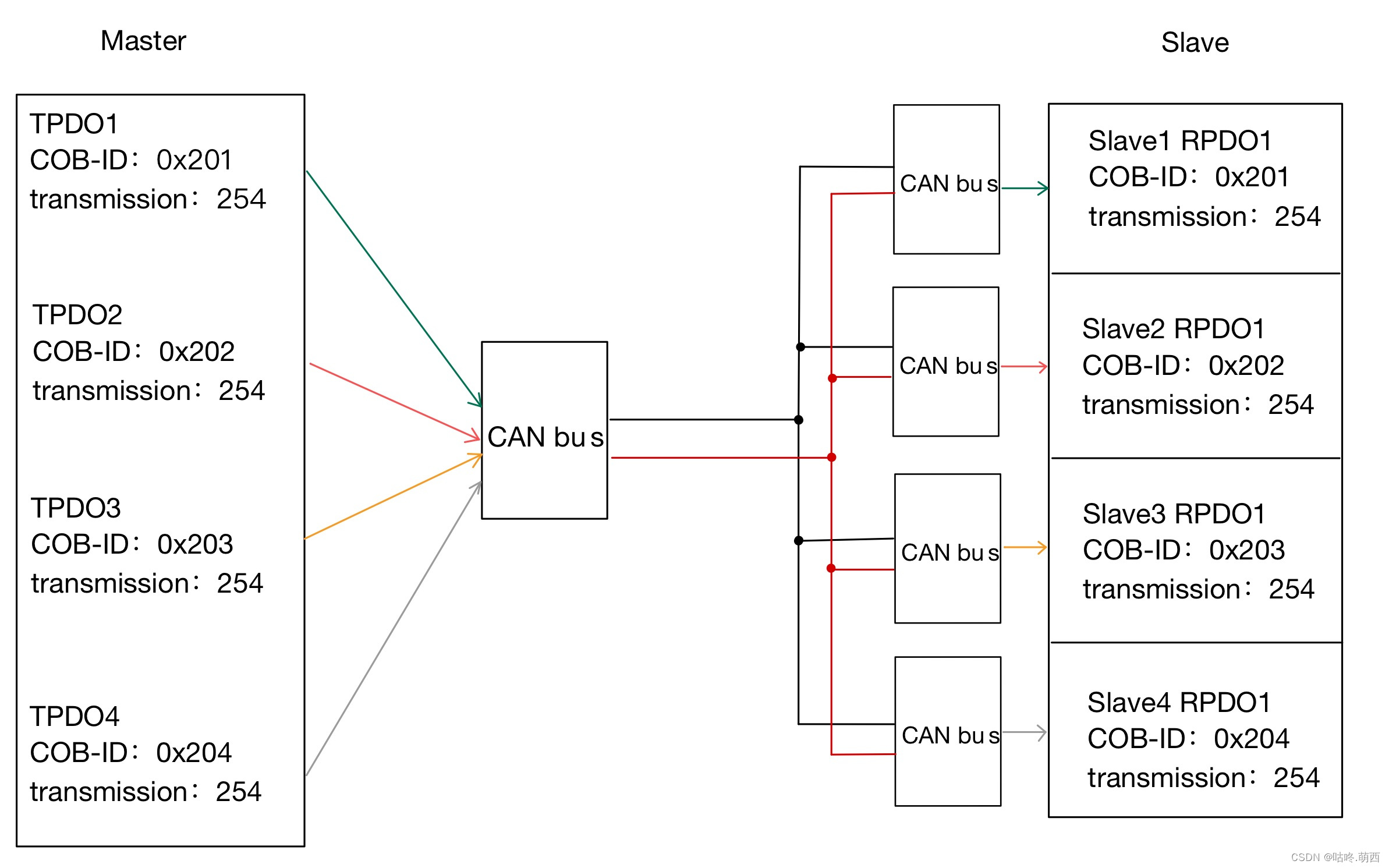
CANopenNode Master 配置
文章目录 CANopenNode 简介CANopenNode 主栈SDO ClientPDO 通讯参数RPDO 通讯参数RPDO 通信参数设置实例TPDO 通讯参数TPDO 通信参数设置实例 PDO 映射参数RPDO 映射参数设置实例TPDO 映射参数设置实例 CANopenNode 简介 CANopenNode 是一个开源的免费的开源 CANopen 协议栈。…...
HW之轻量级内网资产探测漏洞扫描工具
简介 RGPScan是一款支持弱口令爆破的内网资产探测漏洞扫描工具,集成了Xray与Nuclei的Poc 工具定位 内网资产探测、通用漏洞扫描、弱口令爆破、端口转发、内网穿透、SOCK5 主机[IP&域名]存活检测,支持PING/ICMP模式 端口[IP&域名]服务扫描 网…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...

解锁你的音乐收藏:浏览器端音频解密完整指南
解锁你的音乐收藏:浏览器端音频解密完整指南 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https://gitcod…...

Python多智能体建模终极指南:用Mesa轻松构建复杂系统仿真
Python多智能体建模终极指南:用Mesa轻松构建复杂系统仿真 【免费下载链接】mesa Mesa is an open-source Python library for agent-based modeling, ideal for simulating complex systems and exploring emergent behaviors. 项目地址: https://gitcode.com/gh_…...

PyKafka社区贡献指南:从问题报告到代码提交的完整流程
PyKafka社区贡献指南:从问题报告到代码提交的完整流程 【免费下载链接】pykafka Apache Kafka client for Python; high-level & low-level consumer/producer, with great performance. 项目地址: https://gitcode.com/gh_mirrors/py/pykafka 想要为PyK…...
)
别再手动调相机了!用Cinemachine插件5分钟搞定Unity第三人称跟随镜头(含FreeLook Camera配置)
别再手动调相机了!用Cinemachine插件5分钟搞定Unity第三人称跟随镜头当你在Unity中开发角色扮演游戏时,是否经常被这些问题困扰:角色移动时镜头抖动、转向时视角卡顿、不同地形下镜头穿模?传统的手动编写相机跟随脚本不仅耗时耗力…...

D3KeyHelper终极指南:5分钟掌握暗黑3技能自动化
D3KeyHelper终极指南:5分钟掌握暗黑3技能自动化 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper D3KeyHelper是一款专为《暗黑破坏神3》玩…...

Windows Cleaner深度解析:从C盘爆红到系统性能全面优化的完整方案
Windows Cleaner深度解析:从C盘爆红到系统性能全面优化的完整方案 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款完全免费开源…...

TradingAgents-CN:构建智能金融分析系统的5大关键模块解析
TradingAgents-CN:构建智能金融分析系统的5大关键模块解析 【免费下载链接】TradingAgents-CN 基于多智能体LLM的中文金融交易框架 - TradingAgents中文增强版 项目地址: https://gitcode.com/GitHub_Trending/tr/TradingAgents-CN 在金融科技快速发展的今天…...

黑龙江移远科技,是懂预算、懂场景、更懂服务的专业服务商
很多人误以为移远科技只是简单卖设备的贸易公司,实则不然。依托全品牌货源优势、极致性价比、五星贴心服务、专属方案定制,企业早已从传统销售商,升级为综合性通讯安防解决方案服务商,全方位解决客户采购难、选型难、售后难、预算…...

NS-USBLoader完整教程:Switch文件传输与RCM注入一站式解决方案
NS-USBLoader完整教程:Switch文件传输与RCM注入一站式解决方案 【免费下载链接】ns-usbloader Awoo Installer and GoldLeaf uploader of the NSPs (and other files), RCM payload injector, application for split/merge files. 项目地址: https://gitcode.com/…...