QT基础入门【布局篇】消除控件之间的间隔
一、相关参数

layoutLeftMargin: layout内的布局距离边框左端的距离。
layoutTopMargin: layout内的布局距离边框顶端的距离。
layoutRightMargin: layout内的布局距离边框右端的距离。
layoutBottomMargin: layout内的布局距离边框底端的距离。
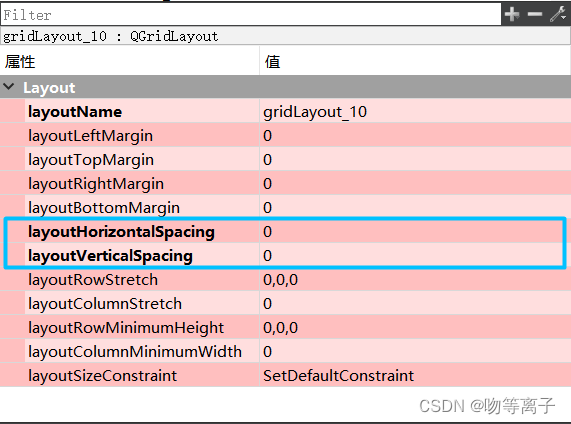
layoutHorizontalSpacing: layout内的水平方向内的对象(包括控件和低一级布局)的水平间隙。
layoutVerticalSpacing:layout内的垂直方向内的对象(包括控件和低一级布局)的垂直间隙。
layoutRowStretch: layout内的水平方向内的对象(包括控件和低一级布局)的水平尺寸比例。(例如1,2,表示水平的两个对象的宽度比例为1:2,不过这也会受到sizePolicy影响)
layoutColumnStretch: layout内的垂直方向内的对象(包括控件和低一级布局)的垂直尺寸比例。
二、设计师修改方法
1.控件之间存在间隙
将下面两个参数设置为零
layoutHorizontalSpacing: layout内的水平方向内的对象(包括控件和低一级布局)的水平间隙。
layoutVerticalSpacing:layout内的垂直方向内的对象(包括控件和低一级布局)的垂直间隙。
注:不同比例的间隙可以通过设置透明边框的宽度来设置
三、代码方法(待验证)
1.设置方法
mainLayout->setMargin(30); //表示控件与窗体的左右边距
mainLayout->setSpacing(40); //表示各个控件之间的上下间距2.设置不同边距
函数原型:
void QLayout::setContentsMargins ( int left, int top, int right, int bottom )
Sets the left, top, right, and bottom margins to use around the layout.作用:设置左侧、顶部、右侧和底部边距,以便在布局周围使用
3. 1与2联系
void QLayout::setMargin(int margin)
{
setContentsMargins(margin, margin, margin, margin);
}相关文章:
QT基础入门【布局篇】消除控件之间的间隔
一、相关参数 layoutLeftMargin: layout内的布局距离边框左端的距离。 layoutTopMargin: layout内的布局距离边框顶端的距离。 layoutRightMargin: layout内的布局距离边框右端的距离。 layoutBottomMargin: layout内的布局距离边框底端的距离。 layoutHorizontalSpacing: layo…...

vue脚手架 element-ui spring boot 实现图片上传阿里云 并保存到数据库
一.阿里云 注册登陆就不讲了,登陆进去后如下操作 1. 进入对象存储OSS 创建一个新的Bucket 随后点击新建的bucket 2.去访问RAM 前往RAM控制台 3.去创建用户 4.创建密匙 5.随后返回RAM控制台 给用户增加权限,文件上传所需权限,需要带含有…...

【FPGA】Verilog:组合电路 | 3—8译码器 | 编码器 | 74LS148
前言:本章内容主要是演示Vivado下利用Verilog语言进行电路设计、仿真、综合和下载 示例:编码/译码器的应用 功能特性: 采用 Xilinx Artix-7 XC7A35T芯片 配置方式:USB-JTAG/SPI Flash 高达100MHz 的内部时钟速度 存储器&…...
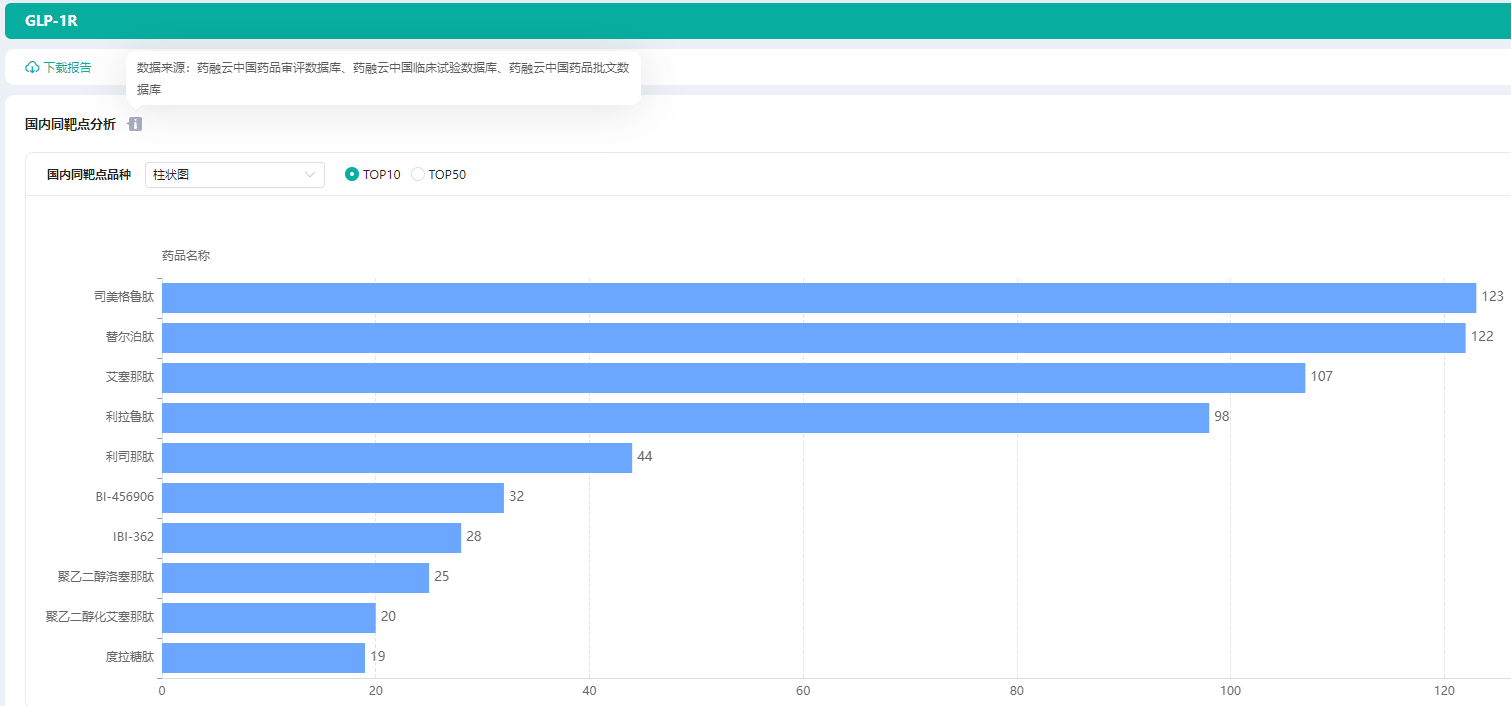
GLP-1类药物研发进展-销售数据-上市药品前景分析
据一项2021 年的报告发现,当 GLP-1 类似物用于治疗 2 型糖尿病时,全因死亡率降低了 12%,它们不仅降糖效果显著,同时还兼具减重、降压、改善血脂谱等作用。近几年,随着GLP-1R激动剂类药物市场规模不断增长,美…...

C++远程监控系统接收端- RevPlayMDIChildWnd.cpp
void CRevPlayWnd::InitMultiSock() { int RevBuf; int status; BOOL bFlag; CString ErrMsg; SOCKADDR_IN stLocalAddr; SOCKADDR_IN stDestAddr; SOCKET hNewSock; int RevLensizeof(RevBuf); //创建一个IP组播套接字 MultiSock W…...
QT之OpenGL深度测试
QT之OpenGL深度测试1. 深度测试概述1. 1 提前深度测试1.2 深度测试相关函数2. 深度测试精度2.1 深度冲突3. Demo4. 参考1. 深度测试概述 在OpenGL中深度测试(Depth Testing)是关闭的,此时在渲染图形时会产生一种现象后渲染的会把最先渲染的遮挡住。而在启用深度测试…...
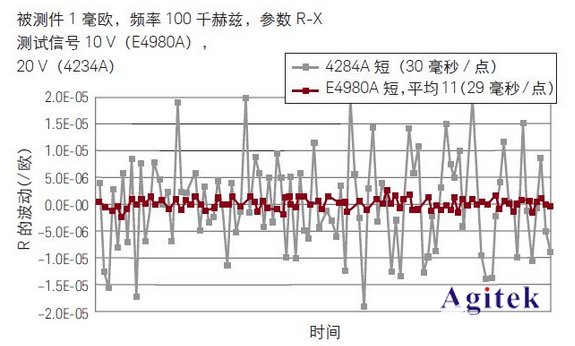
用LCR测试仪测试无线充电系统中的线圈
宽阻抗范围用来表征电感和质量因数– 高精度 DCR 测量– 制造环节快速测量– 大量夹具可供选择智能终端上不断增加新功能,电池寿命成为用户最头痛的问题之一。相比便携式电源和电缆供电而言,无线充电技术因其方便性和多功能性获得了很大的关注࿰…...
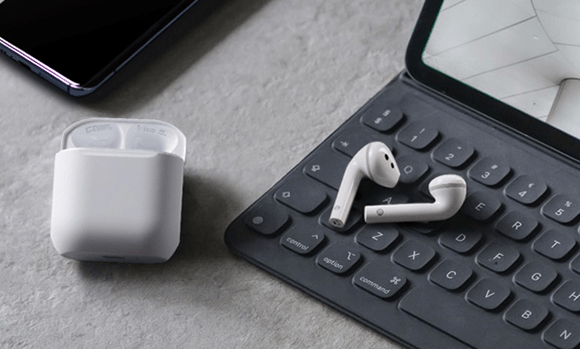
华为、南卡和漫步者蓝牙耳机怎么选?国产高性价比蓝牙耳机推荐
随着蓝牙耳机的快速发展,现如今使用蓝牙耳机的人也越来越多。其中,日益增多的国产蓝牙耳机品牌也逐渐被大众认识、认可。目前一些热销的国产蓝牙耳机,如华为、南卡和漫步者等都是大家比较熟知的品牌。那么,这三个品牌哪个性价比高…...
)
MySQl学习(从入门到精通12)
MySQl学习(从入门到精通12)第 15 章_存储过程与函数1. 存储过程概述1. 1 理解1. 2 分类2. 创建存储过程2. 1 语法分析2. 2 代码举例3. 调用存储过程3. 1 调用格式3. 2 代码举例3. 3 如何调试4. 存储函数的使用4. 1 语法分析4. 2 调用存储函数4. 3 代码举…...

08讲 | 基于STM32单片机NBIOT定位实战项目
前言 绘制基于 STM32 单片机的 NBIOT 实战开发板。 文章目录前言一、原理图1、绘制1)电源供电a、USB 转 TTL 电路b、锂电池充电管理电路c、3.3V电压转换电路d、一键开关机电路2)单片机最小系统3)ADC电压转换电路4)NBIOT 模组串口电…...
提取接近竖直物体(粗定位)
由于项目的需要提取图像之中的一个接近于竖直的物体,一般的方法是进行图像分割,分割方式使用什么OTSU方式以及hsv方法等等。但是项目中使用的相机是黑白相机,会受到一定的限制。因此想到的是使用线条提取方式。线条提取方式之中最好的方法是使…...
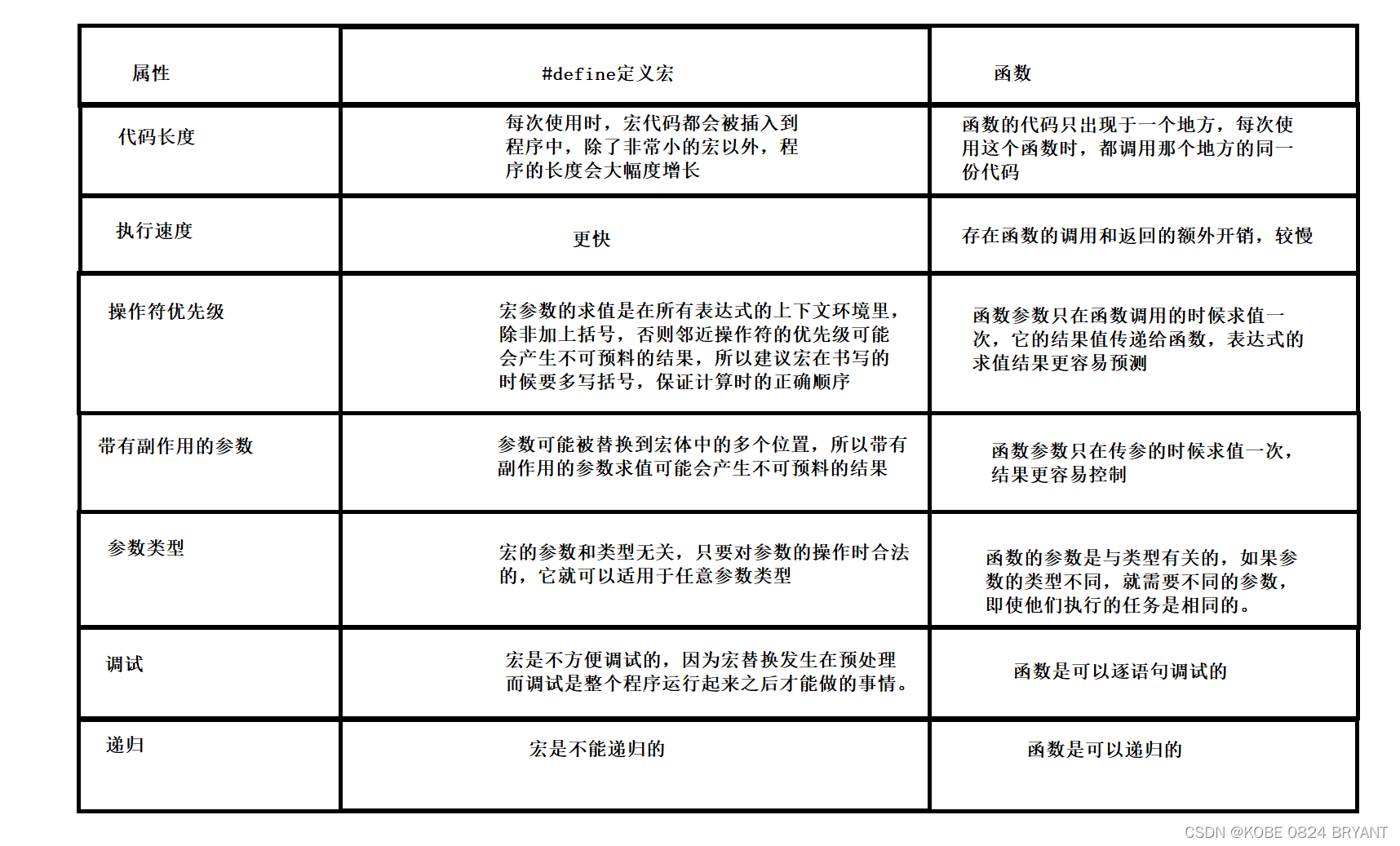
程序环境和预处理
目录一、程序的翻译环境和执行环境二、编译链接2.1 翻译环境2.2 编译2.2.1 预处理2.2.2 编译2.2.3 汇编2.3 链接2.4 结果三、运行环境四、预处理详解4.1 #define4.1.1 #define定义标识符4.1.2 #define定义宏4.1.3 #define 替换规则4.1.4 #和##4.1.5 带副作用的宏参数4.1.6 宏和…...
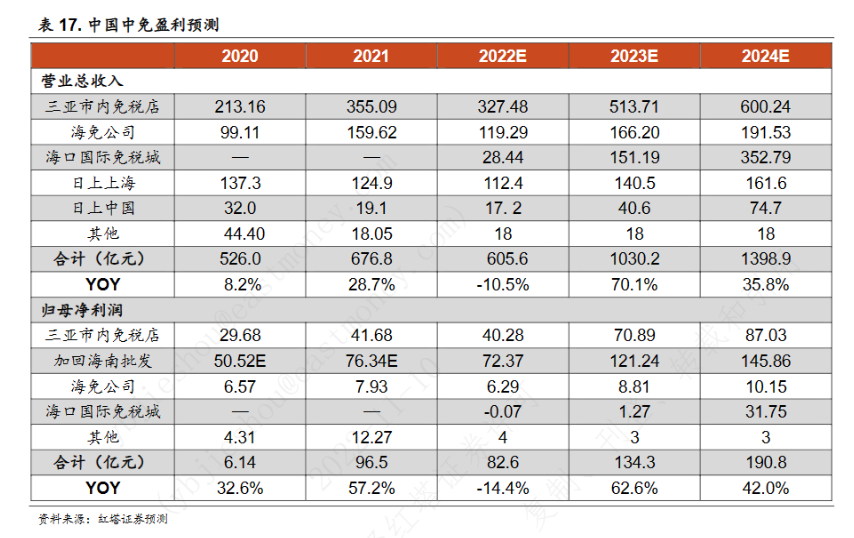
财报解读:业务复苏迹象明显,中国中免能否重写增长神话?
2月3日,中国中免披露2022年度业绩快报,2022年总营收为544.63亿元,同比下降19.52%;实现归属于上市公司股东的净利润50.25亿元,同比下降47.95%。来源:中国中免2022年度业绩快报业绩近乎腰斩,但从长…...

macOS中虚拟机桥接模式分配静态ip
1.首先使用dhclient命令,在局域网中分配一个C类地址。 2.获得地址后,输入ifconfig,查看分配的地址。 3.然后编辑vi /etc/sysconfig/network-scripts/ifcfg-en***文件 在该配置文件中编辑,设置ONBOOTyes,而后添加静态配…...
prometheus increase函数统计得到小数
今天发现prometheus的increase函数得到了小数,研究一下源码,以下是rate/increase/delta 对应的计算函数https://github.com/prometheus/prometheus/blob/d77b56e88e3d554a499e22d2073812b59191256c/promql/functions.go#L55// extrapolatedRate is a uti…...

C++学习记录——유 类和对象(3)
文章目录1、赋值运算符重载1、运算符重载1、理解2、运算符重载实例2、赋值运算符重载2、日期类的实现1、加减函数1、加函数2、减函数2、前/后置--重载3.两个日期相减其他1、流插入2、流提取日期类的整体实现代码: https://gitee.com/kongqizyd/start-some-c-codes-for-learning…...

基于Hi3861平台的OpenHarmony程序是如何启动运行的
一、前言 在继续后面课程的内容讲解前,我们要知道在H3861平台上编写的代码到底是如何启动的,这一点很重要。 先分析HelloWorld程序的启动运行流程,并顺便讲解OpenHarmony在H3861平台的,系统是从哪里启动的。 反着推导函数之间具体…...
2023彻底解决Typora使用iPic微博图床失效问题
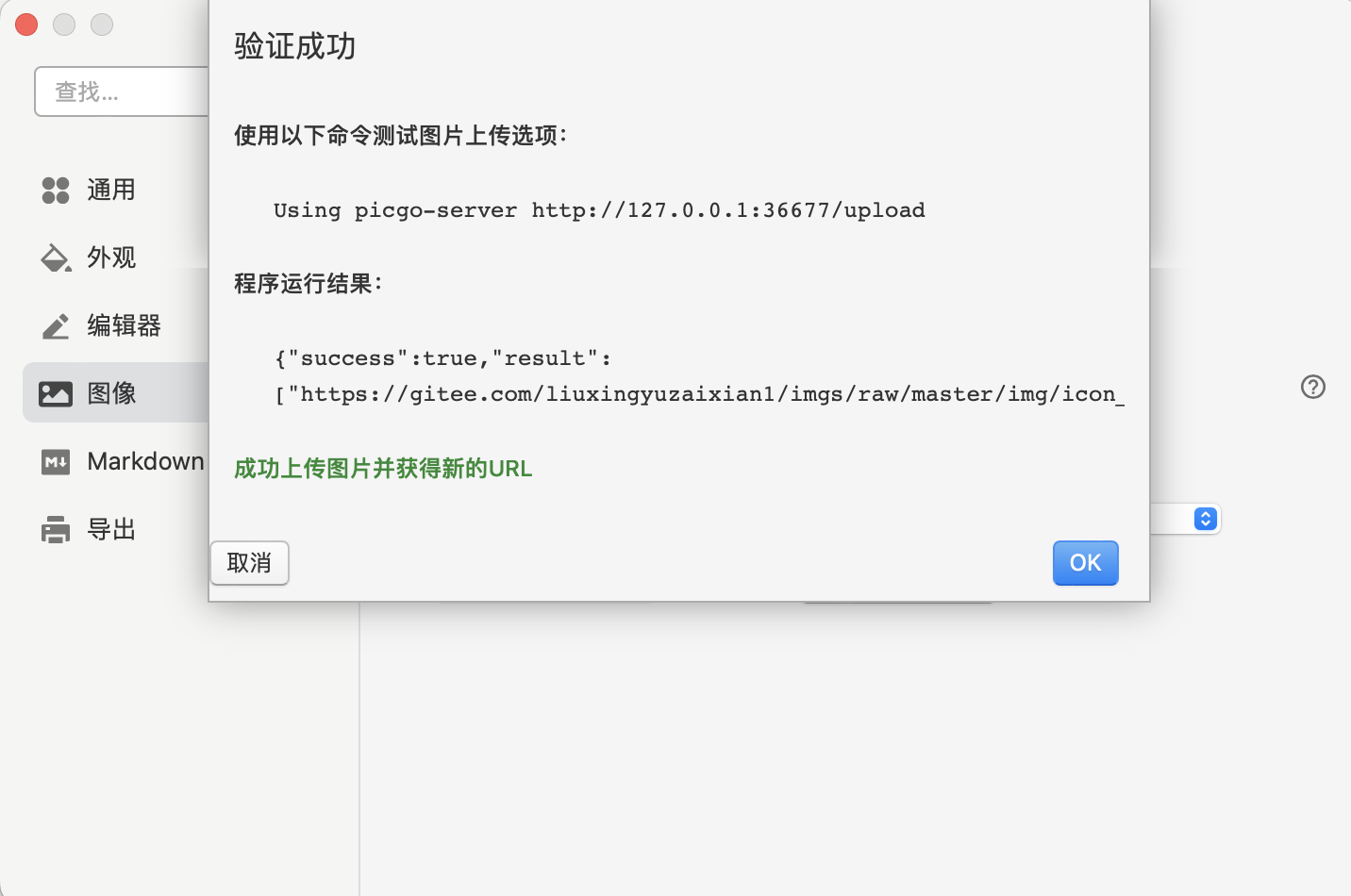
一、问题描述用Typora搭配iPic图床使用,最近csdn图片显示不出来用浏览器打开图片显示403,这里原因是微博图床出问题了导致的而使用iPic其他图床则需要一直付费,那有没有一劳永逸的解决所有问题呢?二、旧图恢复首先怎么找回旧图&am…...
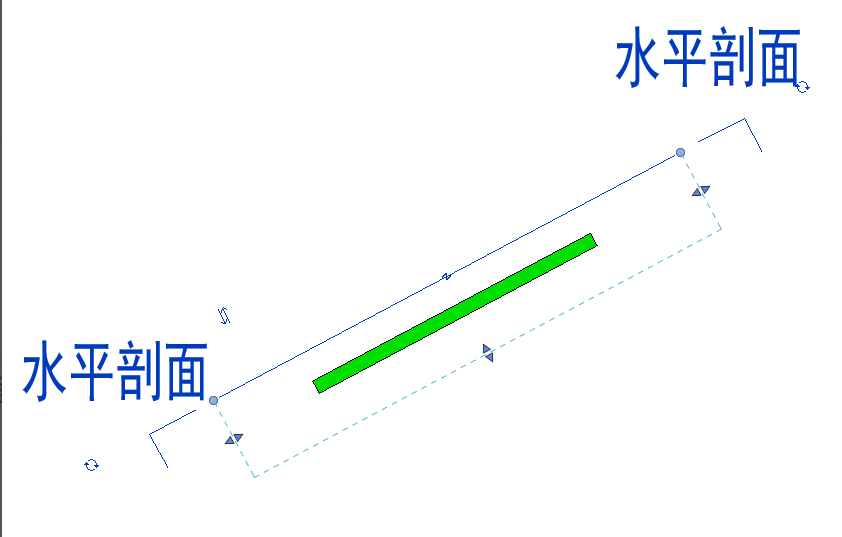
Revit中添加水平仰视平面图及水平剖面
一、 Revit中如何添加水平仰视平面图 在Revit平面视图中视角是俯视视角,但是在一些特殊的情况下,我们可能需要创建仰视视角的平面视图,例如我们需要向上看天花板的灯具布置的时候。 1.下面讲一下如何在添加仰视平面视图的方法。如图1在模型中…...

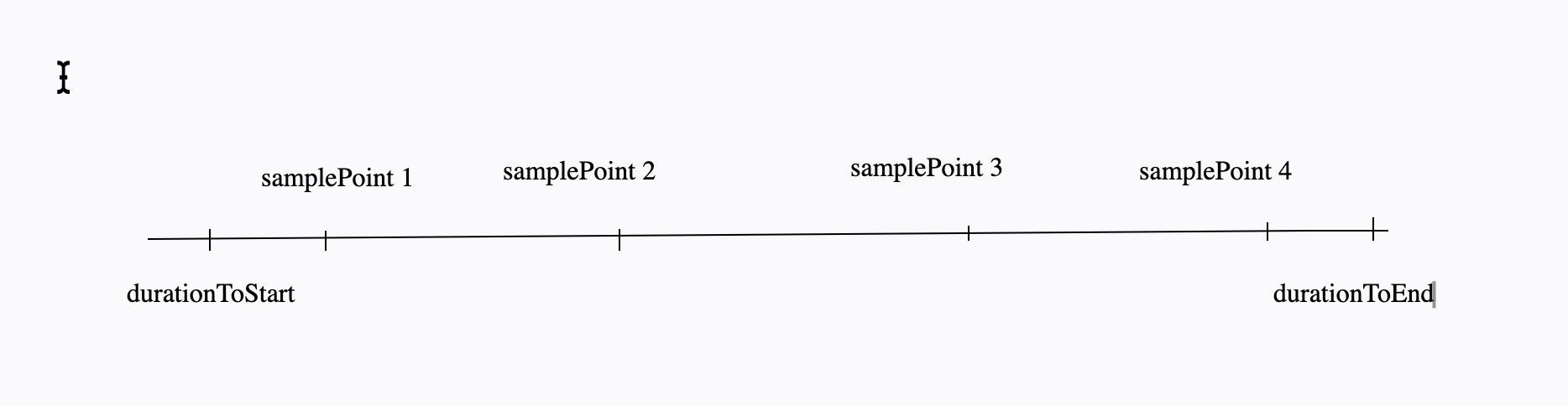
Python 循环语句
Python的循环语句,程序在一般情况下是按顺序执行的。编程语言提供了各种控制结构,允许更复杂的执行路径。循环语句允许我们执行一个语句或语句组多次,下面是在大多数编程语言中的循环语句的一般形式:Python 提供了 for 循环和 whi…...

从‘相似三角形’到3D点云:手把手用Python+OpenCV模拟激光三角法三维重建
从相似三角形到3D点云:PythonOpenCV激光三角法三维重建实战 激光三角测量法在工业检测、逆向工程等领域有着广泛应用。本文将带您从零开始,用Python和OpenCV实现一个完整的激光三角法三维重建系统。不同于简单的位移测量,我们将重点放在如何通…...

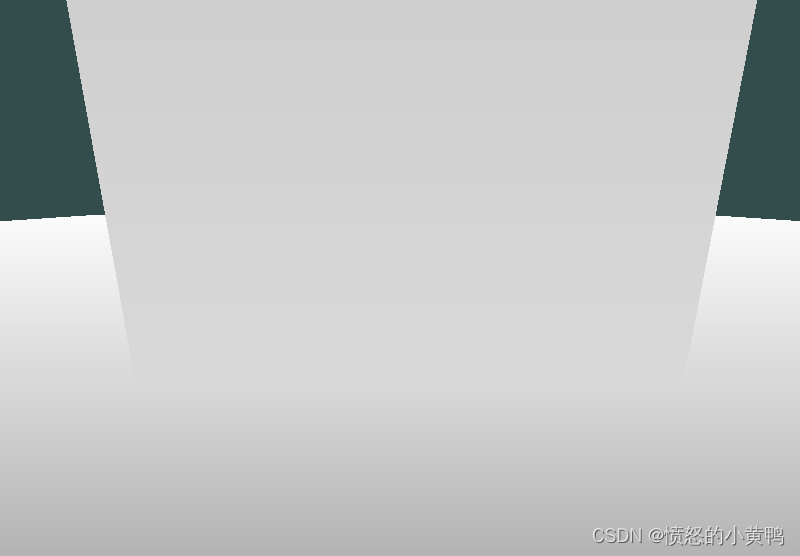
ArcGIS实战:从DEM数据到精美立体晕渲图的调色与渲染全流程
1. 认识DEM数据与立体晕渲图 第一次接触DEM数据时,我完全被那些密密麻麻的数字搞懵了。后来才发现,这些数字其实就是地形的"指纹"。DEM(Digital Elevation Model)就像是用数字搭建的微缩景观,每个像素点都记…...

基于Spring Boot的金融级钱包与支付系统设计与实现
1. 项目概述与核心价值 最近在折腾一个需要集成支付功能的项目,后台管理、用户体系都搭好了,就差一个稳定、灵活且能快速上线的钱包与支付模块。找了一圈开源方案,要么太重,耦合了太多业务逻辑;要么太轻,连…...

终极Visual C++运行库修复指南:一劳永逸解决Windows软件兼容性问题
终极Visual C运行库修复指南:一劳永逸解决Windows软件兼容性问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist Visual C运行库修复工具是解决Windo…...
)
告别软件模拟!用GD32F303的硬件I2C0高效读写EEPROM(附小熊派工程源码)
深入解析GD32F303硬件I2C驱动EEPROM的工程实践 在嵌入式系统开发中,非易失性存储是保存配置参数、运行日志等关键数据的必备功能。传统软件模拟I2C虽然实现简单,但在通信效率和系统资源占用方面存在明显瓶颈。本文将基于GD32F303的硬件I2C0控制器&#x…...
)
2026遥感、地球科学与人工智能国际学术会议(RSGAI 2026)
随着人工智能(AI)技术的迅猛发展,特别是机器学习和深度学习在数据处理与复杂模式识别中的卓越能力,地球科学研究与遥感观测技术正迎来革命性的变革。将人工智能与遥感对地观测、地球信息科学、以及资源环境监测等领域的理论研究和…...

直面2026检测算法:英文论文降AI实战,3款工具深度避坑盘点
赶稿季来临,英文长稿的AI率到底该怎么降?不少同学愁的头都要秃了,不要再一个词一个词的扣了,这不仅慢,还会把好好的学术英语改得支离破碎。 坦率的讲,真正聪明的降ai,绝对不是机械替换…...

从登录到支付:手把手教你用RSA签名验签保护Spring Boot API接口安全
从登录到支付:Spring Boot API接口的RSA签名验签实战指南 在数字化业务高速发展的今天,API接口安全已成为系统设计的核心议题。想象这样一个场景:用户通过移动端提交登录请求,黑客在传输过程中篡改了密码字段;或是支付…...

终极鼠标革命:如何用Mac Mouse Fix让你的普通鼠标超越苹果触控板体验
终极鼠标革命:如何用Mac Mouse Fix让你的普通鼠标超越苹果触控板体验 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 还在为macOS上…...

AI应用安全实战:基于Rebuff框架构建提示词注入防御体系
1. 项目概述:一个为AI应用量身定制的“输入防火墙”最近在折腾AI应用安全,特别是针对提示词注入(Prompt Injection)的防御,发现了一个非常对味的开源工具——protectai/rebuff。简单来说,Rebuff是一个专门设…...