[Halcon3D] 主流的3D光学视觉方案及原理
- 📢博客主页:https://loewen.blog.csdn.net
- 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正!
- 📢本文由 丶布布原创,首发于 CSDN,转载注明出处🙉
- 📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨
文章预览:
- 一. 前言
- 二. 主流3D成像方法汇总
- 1、双目立体视觉法(Stereo Vision)
- 2、激光三角传感器原理
- 3、结构光法(Structured Light)
- 4、飞行时间法(Time of Flight)
一. 前言
传统工业机器视觉中,3D视觉与2D视觉技术的最大区别在于处理的数据类型不同:
2D视觉领域中,主要是处理二维(X,Y)平面图像里的信息(像素的灰度值)—— 像素灰度处理;3D视觉领域中,核心是对3D传感器采集到的三维(X,Y,Z)点云数据进行处理,可对物体进行立体测量,获取物体平面度、高度等信息 —— 点云数据处理;
二. 主流3D成像方法汇总
目前市面上的测距方法主要分为两个大类:
- 被动测量类:单目视觉、双目视觉和多目视觉;
- 主动测量类:结构光法、
TOF飞行时间法,激光三角测距法;
一般工业领域都是普遍采用激光三角测距法,因为激光三角测距法的精度比较高,抗干扰能力也很强,此外结构光+双目/单目的方式也比较常见。
1、双目立体视觉法(Stereo Vision)
双目立体视觉法的技术原理是通过从两个视点观察同一物体,从而来获得同一物体在不同视角下的图像。通过三角测量原理来计算图像像素间的位置偏差(视差)来获取物体的三维图像,比如把一只手指放在鼻尖前方,左右眼看到手指会有一个错位的效果,这个位置差被称为视差。相机所要拍摄的物体离相机越近,视差越大,离相机越远,视差就越小。由此可以得出,当两个相机的位置等条件已知时,就可以通过计算相似三角形的原理来得出从物体到相机的距离。

2、激光三角传感器原理
3D激光相机利用激光三角反射原理生成点云数据,它由激光发射器、镜头以及感光芯片,如图所示:

在3D相机中,取代光源的是激光发射器,通过复杂的光学系统设计,激光发射器发出一束激光照射到被测物体表面,反射光经过光学透镜组在相机的感光元件表面形成光斑,不同高度的表面反射形成的光斑位置各不相同。如下图所示,当被检测表面偏高时,测量激光光斑位置会右移;反之,如果被检测表面偏低时,测量激光光斑位置会左移。

而我们实际需要求的就是物体表面①②之间高度差h,具体计算如下所示(以直射式为例):

已知激光和相机之间的夹角θ、像高h’(通过处理图像获得)、焦距 f、OH = hcosθ,AH = hsinθ、A’JO’与AJH为相似三角形,则可通过公式计算高度h:
f a + h c o s θ = h ’ a + h s i n θ \frac{f}{a+hcosθ} = \frac{h’}{a+hsinθ} a+hcosθf=a+hsinθh’
三维(X,Y,Z)点云数据的获取:
一般我们把激光线方向称为X方向,也就是激光照射出来的那条线定义为X轴,高度为Z方向,通过一次静态拍照,我们可以得到X和Z两个方向的数据,Y方向可以通过移动相机或者移动物体,使相机持续不断的拍照,就形成了连续的Y方向数据,最后组合在一起,就是我们所需要的3D点云数据。

注:不同厂家的产品,X/Y方向可能是相反的。
激光三角线扫速度(行频)与传送带速度匹配关系:
v ∗ t μ ∗ t = W w \frac{v * t}{μ * t} = \frac{W}{w} μ∗tv∗t=wW
其中:v:传送带速度;μ:激光三角线扫速度;W:传送带X方向宽度;w:传送带X方向像素的个数;
注:速度不匹配可能会导致图像出现拉伸情况。
3D激光相机的手动搭建流程:
相机内外参标定(同2D标定)—— 激光器发射的光平面和相机之间的位置关系标定 —— 移动标定(激光器不一定垂直发射到平面的,需要校正)
3、结构光法(Structured Light)
结构光(Structured light):通常采用特定波长的不可见的红外激光作为光源,它发射出来的光经过一定的编码投影在物体上,通过一定算法来计算返回的编码图案的畸变来得到物体的位置和深度信息。根据编码图案不同一般有条纹结构光—enshape ,编码结构光—Mantis Vision, Realsense(F200), 散斑结构光–apple(primesense)
结构光法利用光学三角测量原理,分为单目结构光和双目结构光,如图所示以双目结构光为例:

特定波长的Laser发出的结构光照射在物体表面,其反射的光线被带滤波的camera相机接收,滤波片保证只有该波长的光线能为camera所接受。芯片对接收到的光斑图像进行运算,得出物体的深度数据。
4、飞行时间法(Time of Flight)
TOF是Time of Flight的简写,直译为飞行时间的意思。所谓飞行时间法3D成像,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离,从而获取物体三维轮廓信息。

TOF法根据调制方法的不同,一般可以分为两种:脉冲调制(Pulsed Modulation)和连续波调制(Continuous Wave Modulation)。
TOF深度相机对时间测量的精度要求较高,即使采用最高精度的电子元器件,也很难达到毫米级的精度。因此,在近距离测量领域,尤其是1m范围内,TOF深度相机的精度与其他深度相机相比还具有较大的差距,这限制它在近距离高精度领域的应用,具体应用场景参考:3D视觉传感技术。
| 下雨天,最惬意的事莫过于躺在床上静静听雨,雨中入眠,连梦里也长出青苔。 |
相关文章:
[Halcon3D] 主流的3D光学视觉方案及原理
📢博客主页:https://loewen.blog.csdn.net📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正!📢本文由 丶布布原创,首发于 CSDN,转载注明出处🙉📢现…...

Go Web下gin框架使用(二)
〇、gin 路由 Gin是一个用于构建Web应用程序的Go语言框架,它具有简单、快速、灵活的特点。在Gin中,可以使用路由来定义URL和处理程序之间的映射关系。 r : gin.Default()// 访问 /index 这个路由// 获取信息r.GET("/index", func(c *gin.Con…...

算法笔记-线段树合并
线段树合并 前置知识:权值线段树、动态开点 将两棵线段树的信息合并成一棵线段树。 可以新建一颗线段树保存原来两颗线段树的信息,也可以将第二棵线段树维护的信息加到第一棵线段树上。 前者的空间复杂度较高,如果合并之前的线段树不会再用…...

Fiddler抓取IOS数据包实践教程
Fiddler是一个http协议调试代理工具,它能够记录并检查所有你的电脑和互联网之间的http通讯,设置断点,查看所有的“进出”Fiddler的数据(指cookie,html,js,css等文件)。 本章教程,主要介绍如何利用Fiddler抓取IOS数据包相关教程。 目录 一、打开Fiddler监听端口 二、配置网…...
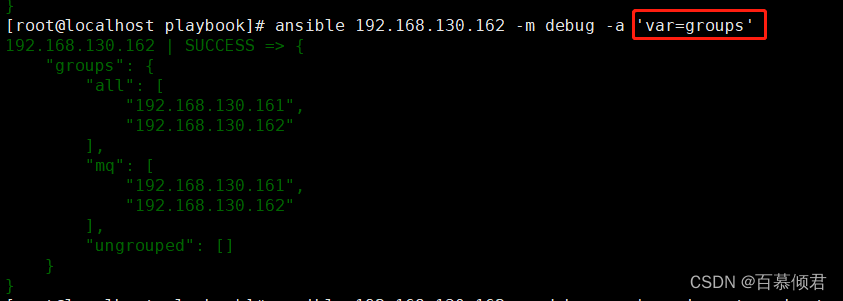
Ansible基础4——变量、机密、事实
文章目录 一、变量二、机密2.1 创建加密文件2.2 查看加密文件2.3 编辑加密文件内容2.4 加密现有文件2.5 解密文件2.6 更改加密密码 三、事实3.1 收集展示事实3.2 展示某个结果3.3 新旧事实命令3.4 关闭事实3.5 魔法变量 一、变量 常设置的变量: 要创建的用户要安装的…...

React实现Vue的watch监听属性
在 Vue 中可以简单地使用 watch 来监听数据的变化,还能获取到改变前的旧值,而在 React 中是没有 watch 的。 React中比较复杂,但是我们如果想在 React 中实现一个类似 Vue 的 watch 监听属性,也不是没有办法。 在React类组件中实…...

axios、跨域与JSONP、防抖和节流
文章目录 一、axios1、什么是axios2、axios发起GET请求3、axios发起POST请求4、直接使用axios发起请求 二、跨域与JSONP1、了解同源策略和跨域2、JSONP(1)实现一个简单的JSONP(2)JSONP的缺点(3)jQuery中的J…...

macOS Ventura 13.5beta2 (22G5038d)发布
系统介绍 黑果魏叔 6 月 1 日消息,苹果今日向 Mac 电脑用户推送了 macOS 13.5 开发者预览版 Beta 2 更新(内部版本号:22G5038d),本次更新距离上次发布隔了 12 天。 macOS Ventura 带来了台前调度、连续互通相机、Fac…...
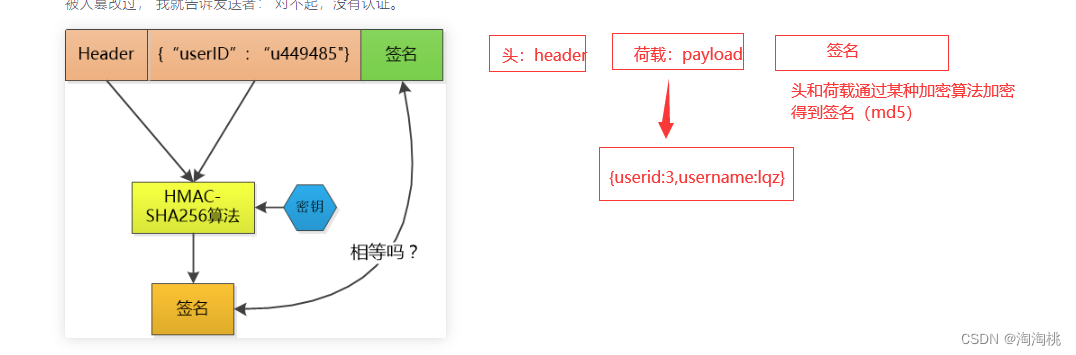
jwt----介绍,原理
token:服务的生成的加密字符串,如果存在客户端浏览器上,就叫cookie -三部分:头,荷载,签名 -签发:登录成功,签发 -认证:认证类中认证 # jwt&…...

Three.js--》实现3d水晶小熊模型搭建
目录 项目搭建 初始化three.js基础代码 加载背景纹理 加载小熊模型 今天简单实现一个three.js的小Demo,加强自己对three知识的掌握与学习,只有在项目中才能灵活将所学知识运用起来,话不多说直接开始。 项目搭建 本案例还是借助框架书写…...
《阿里大数据之路》研读笔记(1)
首先先看到OLAP和OLTP的区别: OLTP(Online transaction processing):在线/联机事务处理。典型的OLTP类操作都比较简单,主要是对数据库中的数据进行增删改查,操作主体一般是产品的用户或者是操作人员。 OLAP(Online analytical processing):…...

Logback 日志框架详解
一、Logback 简介 Logback 是一个日志框架,旨在成为 log4j 的替代品。它由 Ceki Glc 创建并维护,是一款开源的日志框架,是 slf4j(Simple Logging Facade for Java)的实现。相比于 log4j,Logback 具有更高的…...

BIO、NIO、AIO 有什么区别?
BIO (Blocking I/O): Block IO 同步阻塞式 IO ,传统 IO,特点是模式简单、使用方便,并发处理能力低。 同步阻塞 I/O 模式,数据的读取写入必须阻塞在一个线程内等待其完成,在活动连接数不是特别高(…...

nginx和tomcat负载均衡、静态分离
tomcat重要目录 bin 存放启动和关闭Tomcat脚本conf存放Tomcat不同的配置文件doc存放Tomcat文档lib存放Tomcat运行需要的库文件logs存放Tomcat执行时的log文件src存放Tomcat的源代码webappsTomcat的主要Web发布目录work存放jsp编译后产生的class文件 nginx负载均衡原理 nginx实…...

用AI写出的高考作文!
今天是6月7日,又到了每一年高考的日子。小灰自己参加高考是在2004年,距离现在已经将近20年,现在回想起来,真的是恍如隔世。 今天高考语文的作文题是什么呢? 全国甲卷的题目是:人技术时间 人们因技术发展得以…...

chatgpt赋能python:Python屏幕输入介绍:了解命令行输入的基本知识
Python屏幕输入介绍:了解命令行输入的基本知识 Python是一种使用广泛的编程语言,用于编写各种类型的应用程序,包括图形用户界面应用程序和基于命令行的应用程序。对于基于命令行的应用程序来说,屏幕输入非常重要。本文将介绍Pyth…...

bert中文文本摘要代码(1)
bert中文文本摘要代码 写在最前面关于BERT使用transformers库进行微调 load_data.py自定义参数collate_fn函数BertDataset类主函数 tokenizer.py创建词汇表encode函数decode函数 写在最前面 熟悉bert+文本摘要的下游任务微调的代码,方便后续增加组件实现…...

为何溃坝事故频发,大坝安全如何保障?
随着水利水电工程的重要性日益突显,水库大坝安全越来越受到相关部门的重视。因为大坝的安全直接影响水利工程的功能与作用,因此对大坝安全的监测显得十分必要。大坝安全监测的作用是能够及时掌握大坝的运行状态,及时发现大坝的变形、渗漏等异…...

第十九章_手写Redis分布式锁
锁的种类 单机版同一个JVM虚拟机内synchronized或者Lock接口。 分布式多个不同JVM虚拟机,单机的线程锁机制不再起作用,资源类在不同的服务器之间共享了。 一个靠谱分布式锁需要具备的条件和刚需 独占性 :OnlyOne,任何时刻只能有且…...

电路设计【8】原理图中VCC、VDD、VEE、VSS、VBAT各表示什么意思
文章目录 一、名词解析二、应用讲解三、举例分析:为什么stm32vet6中要分出5对VDD VSS?它们分别负责哪些模块的供电? 一、名词解析 (1)VCC:Ccircuit 表示电路的意思, 即接入电路的电压 (2&…...
)
基于微信小程序的家政服务预约系统(30291)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...
)
Ubuntu 20.04虚拟机重启后断网?别慌,用Netplan配置静态IP一劳永逸(附避坑指南)
Ubuntu 20.04虚拟机网络配置终极指南:Netplan静态IP与持久化方案 当你兴奋地启动Ubuntu 20.04虚拟机准备大展身手时,突然发现网络连接消失了——这不是个别现象。许多开发者在本地虚拟化环境或云平台中都遭遇过类似困扰。本文将彻底解决这个"幽灵断…...

AsyncRun.vim 项目根目录管理:智能识别和高效利用
AsyncRun.vim 项目根目录管理:智能识别和高效利用 【免费下载链接】asyncrun.vim :rocket: Run Async Shell Commands in Vim 8.0 / NeoVim and Output to the Quickfix Window !! 项目地址: https://gitcode.com/gh_mirrors/as/asyncrun.vim AsyncRun.vim 是…...

19 - 语言模型为何是AGI的开端?——从“知识压缩”到“智能涌现”的第一性原理
本专题系列文章共 21 篇,前 5 篇限时免费阅读 01 - 眩晕时代的定海神针:大模型落地的“第一性原理”与算力丰裕悖论 02 - 95%的AI投资打了水漂:五大错配如何扼杀你的“第二增长曲线” 03 - 从电力到AI:标准化已死,个性化永生——大模型时代的三大商业终局 04 - 你的护城…...

AI Agent Harness Engineering 未来生态:开源 vs 闭源的竞争与合作格局
AI Agent Harness Engineering 未来生态:开源 vs 闭源的竞争与合作格局 引言:AI Agent不是终点,Harness才是通用智能落地的核心阀门 1.1 从“AI大模型(LLM)元年”到“AI Agent生态元年”:技术拐点的悄然发…...

Windows安全组件深度解析与优化:2025专业版系统性能调优完整指南
Windows安全组件深度解析与优化:2025专业版系统性能调优完整指南 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://gitcode.com/gh_m…...

AI驱动BI分析:MCP协议与Metabase助手实战指南
1. 项目概述:当AI助手成为你的BI分析师如果你和我一样,每天都要和Metabase打交道,那你肯定经历过这样的场景:业务同事跑过来问,“能不能帮我拉一下上个月每个渠道的转化率?”,或者产品经理说&am…...

洛谷 P1305:新二叉树 ← DFS + 字符索引数组 + map
【题目来源】 https://www.luogu.com.cn/problem/P1305 【题目描述】 输入一串二叉树,输出其前序遍历。 【输入格式】 第一行为二叉树的节点数 n。(1≤n≤26) 后面 n 行,第一个字母为节点,后两个字母分别为其左右儿子。特别地,…...

技术演讲的恐惧症:从实验室到舞台的艰难跨越
一、实验室里的从容,舞台上的慌乱对于软件测试从业者而言,实验室是我们的“舒适区”。在堆满服务器、屏幕上跳动着代码与测试用例的空间里,我们能精准定位一行代码的bug,能设计出覆盖所有场景的测试方案,能在复杂的系统…...

别再算错了!等保2.0 2021版测评新规下,多系统/多机房得分计算保姆级教程
等保2.0 2021版多系统测评得分计算实战指南 当企业拥有多个机房或业务系统时,等保测评得分计算往往成为安全负责人最头疼的问题。2021版测评新规对多对象场景的计算方式进行了重要调整,这些变化直接影响最终得分和整改策略。本文将用真实案例拆解新旧计算…...