2 STM32库函数 之 通用同步异步收发器(USART、串口)所有函数的介绍及使用
2 STM32库函数 之 通用同步异步收发器(USART、串口)所有函数的介绍及使用
- 前言
- 一、USART固件库函数预览
- 二、USART固件库函数具体介绍
- 2.1 库函数 USART_DeInit
- 2.2 库函数 USART_Init
- 2.2.1 USART_InitTypeDef structure
- 2.2.2 USART_InitTypeDef 成员 USART 模式对比
- 2.2.3 USART_BaudRate
- 2.2.4 USART_WordLength
- 2.2.5 USART_StopBits
- 2.2.6 USART_Parity
- 2.2.7 USART_HardwareFlowControl
- 2.2.8 USART_Mode
- 2.2.9 USART_CLOCK
- 2.2.10 USART_CPOL
- 2.2.11 USART_CPHA
- 2.2.12 USART_LastBit
- 2.3 库函数 USART_StructInit
- 2.3.1 USART_InitStruct 默认值
- 2.4 库USART_ClockInit
- 2.4.1 USART_ClockInitTypeDef
- 2.4.2 USART_Clock 时钟使能控制
- 2.4.3 USART_CPOL 时钟极性
- 2.4.4 USART_CPHA 时钟相位
- 2.4.5 USART_LastBit 最尾位时钟脉冲
- 2.5 库函数 USART_ClockStructInit
- 2.5.1 USART_ClockInitTypeDef 默认值
- 2.6 库函数 USART_ Cmd
- 2.7 库函数 USART_SetPrescaler
- 2.8 库函数 USART_OverSampling8Cmd
- 2.9 库函数 USART_OneBitMethodCmd
- 2.10 库函数 USART_SendData
- 2.11 函数USART_ReceiveData
- 2.12 函数 USART_SetAddress
- 2.13 库函数 USART_WakeUpConfig
- 2.13.1 USART_WakeUp
- 2.14 库函数 USART_ReceiverWakeUpCmd
- 2.15 库函数 USART_LINBreakDetectiLengthConfig
- 2.15.1 USART_LINBreakDetectLength
- 2.16 库函数 USART_LINCmd
- 2.17 库函数 USART_SendBreak
- 2.18 库函数 USART_HalfDuplexCmd
- 2.19 库函数 USART_SmartCardCmd
- 2.20 库函数 USART_SmartCardNackCmd
- 2.21 库函数 USART_SetGuardTime
- 2.22 库函数 USART_IrDAConfig
- 2.22.1 USART_IrDAMode
- 2.23 库函数 USART_IrDACmd
- 2.24 库函数 USART_ DMACmd
- 2.24.1 USART_DMAreq
- 2.25 库函数 USART_ITConfig
- 2.25.1 USART_IT
- 2.26 库函数 USART_ GetFlagStatus
- 2.26.1 USART_FLAG
- 2.27 库函数 USART_ ClearFlag
- 2.28 库函数 USART_ GetITStatus
- 2.28.1 SART_IT
- 2.29 函数 USART_ ClearITPendingBit
- 三 项目中部分函数的使用
- 3.1 串口1的初始化:
- 3.2 串口2-RS232初始化
- 3.2 串口2-RS485初始化
- 该文档修改记录:
- 总结
前言
通用同步异步收发器(USART)提供了一种灵活的方法来与使用工业标准 NRZ 异步串行数据格式的外部
设备之间进行全双工数据交换。USART 利用分数波特率发生器提供宽范围的波特率选择。它支持同步单
向通信和半双工单线通信。它也支持 LIN(局部互连网),智能卡协议和 IrDA(红外数据组织)SIR ENDEC 规
范,以及调制解调器(CTS/RTS)操作。它还允许多处理器通信。使用多缓冲器配置的 DMA 方式,可以实
现高速数据通信。
函数描述格式:
| 函数名 | 外设函数的名称 |
|---|---|
| 函数原形 | 原形声明 |
| 功能描述 | 简要解释函数是如何执行的 |
| 输入参数{x} | 输入参数描述 |
| 输出参数{x} | 输出参数描述 |
| 返回值 | 函数的返回值 |
| 先决条件 | 调用函数前应满足的要求 |
| 被调用函数 | 其他被该函数调用的库函数 |
缩写定义
| 缩写 | 外设/单元 |
|---|---|
| ADC | 模数转换器 |
| BKP | 备份寄存器 |
| CAN | 控制器局域网模块 |
| DMA | 直接内存存取控制器 |
| EXTI | 外部中断事件控制器 |
| FLASH | 闪存存储器 |
| GPIO | 通用输入输出 |
| I2C | 内部集成电路 |
| IWDG | 独立看门狗 |
| NVIC | 嵌套中断向量列表控制器 |
| PWR | 电源/功耗控制 |
| RCC | 复位与时钟控制器 |
| RTC | 实时时钟 |
| SPI | 串行外设接口 |
| SysTick | 系统嘀嗒定时器 |
| TIM | 通用定时器 |
| TIM1 | 高级控制定时器 |
| USART | 通用同步异步接收发射端 |
| WWDG | 窗口看门狗 |
一、USART固件库函数预览
| 序号 | 函数名 | 描述 |
|---|---|---|
| 1 | USART_DeInit | 将外设 USARTx 寄存器重设为默认值 |
| 2 | USART_Init | 根据USART_InitStruct 中指定的参数初始化外设 USARTx 寄存器 |
| 3 | USART_StructInit | 把 USART_InitStruct 中的每一个参数按默认值填入 |
| 4 | USART_ClockInit | 初始化USARTx外围时钟 |
| 5 | USART_ClockStructInit | 将每个usart_clockkinitstruct成员填充为默认值 |
| 6 | USART_Cmd | 使能或者失能 USART 外设 |
| 7 | USART_SetPrescaler | 设置 USART 时钟预分频 |
| 8 | USART_OverSampling8Cmd | 启用或禁用USART的8倍过采样模式 |
| 9 | USART_OneBitMethodCmd | 启用或禁用USART的一位采样方法 |
| 10 | USART_SendData | 通过外设 USARTx 发送单个数据 |
| 11 | USART_ReceiveData | 返回 USARTx 最近接收到的数据 |
| 12 | USART_SetAddress | 设置 USART 节点的地址 |
| 13 | USART_WakeUpConfig | 选择USART 的唤醒方式 |
| 14 | USART_ReceiverWakeUpCmd | 检查 USART 是否处于静默模式 |
| 15 | USART_LINBreakDetectLengthConfig | 设置 USART LIN 中断检测长度 |
| 16 | USART_LINCmd | 使能或者失能 USARTx 的 LIN 模式 |
| 17 | USART_SendBreak | 发送中断字 |
| 18 | USART_HalfDuplexCmd | 使能或者失能 USART 半双工模式 |
| 19 | USART_SmartCardCmd | 使能或者失能指定 USART 的智能卡模式 |
| 20 | USART_SmartCardNackCmd | 使能或者失能 NACK 传输 |
| 21 | USART_SetGuardTime | 设置指定的 USART 保护时间 |
| 22 | USART_IrDAConfig | 设置 USART IrDA 模式 |
| 23 | USART_IrDACmd | 使能或者失能 USART IrDA 模式 |
| 24 | USART_DMACmd | 使能或者失能指定 USART 的 DMA 请求 |
| 25 | USART_ITConfig | 使能或者失能指定的 USART 中断 |
| 26 | USART_GetFlagStatus | 检查指定的 USART 标志位设置与否 |
| 27 | USART_ClearFlag | 清除 USARTx 的待处理标志位 |
| 28 | USART_GetITStatus | 检查指定的 USART 中断发生与否 |
| 29 | USART_ClearITPendingBit | 清除 USARTx 的中断待处理位 |
函数功能分类:
| 序号数量 | 函数功能分类说明 |
|---|---|
| 序号1 函数 | 是将USART配置设置为默认重置状态的函数; |
| 序号2~9函数 | 是USART初始化和配置函数; |
| 序号10~11函数 | 是USART数据传输函数功能; |
| 序号12~14函数 | 是USART多处理器通信功能; |
| 序号12~14函数 | 是USART多处理器通信功能; |
| 序号15~17函数 | 是USART LIN模式函数功能; |
| 序号18函数 | 是USART 半双工模式函数功能; |
| 序号19~21函数 | 是USART 智能卡模式功能功能; |
| 序号22~23函数 | 是USART IrDA模式函数功能; |
| 序号24~29函数 | 是USART 中断和标记管理功能; |
二、USART固件库函数具体介绍
2.1 库函数 USART_DeInit
| 函数名 | USART_DeInit |
|---|---|
| 函数原形 | void USART_DeInit(USART_TypeDef* USARTx) |
| 功能描述 | 将外设 USARTx 寄存器重设为默认值 |
| 输入参数 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | RCC_APB2PeriphResetCmd() ;RCC_APB1PeriphResetCmd() |
代码如下(示例):
/* 将 USART1 寄存器重置为默认重置值 */
USART_DeInit(USART1);
2.2 库函数 USART_Init
注:该函数是以F1系列单片机的函数来进行解释的,F4系列单片机的USART_InitTypeDef 结构体把时钟初始化单独拿出来了;下面有介绍。
| 函数名 | USART_Init |
|---|---|
| 函数原形 | void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct) |
| 功能描述 | 根据 USART_InitStruct 中指定的参数初始化外设 USARTx 寄存器 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_InitStruct:指向结构 USART_InitTypeDef 的指针,包含了外设 USART 的配置信息。 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.2.1 USART_InitTypeDef structure
USART_InitTypeDef structure USART_InitTypeDef 定义于文件“stm32fxxx_usart.h”: typedef struct
{
u32 USART_BaudRate;
u16 USART_WordLength;
u16 USART_StopBits;
u16 USART_Parity;
u16 USART_HardwareFlowControl;
u16 USART_Mode;
u16 USART_Clock;
u16 USART_CPOL;
u16 USART_CPHA;
u16 USART_LastBit;
} USART_InitTypeDef;
.下面 描述了结构 USART_InitTypeDef 在同步和异步模式下使用的不同成员。
2.2.2 USART_InitTypeDef 成员 USART 模式对比
| 成员 | 异步模式 | 同步模式 |
|---|---|---|
| USART_BaudRate | X | X |
| USART_WordLength | X | X |
| USART_StopBits | X | X |
| USART_Parity | X | X |
| USART_HardwareFlowControl | X | X |
| USART_Mode | X | X |
| USART_Clock | X | |
| USART_CPOL | X | |
| USART_CPHA | X | |
| USART_LastBit | X |
2.2.3 USART_BaudRate
该成员设置了 USART 传输的波特率,波特率可以由以下公式计算: IntegerDivider = ((APBClock) / (16 * (USART_InitStruct->USART_BaudRate))) FractionalDivider = ((IntegerDivider - ((u32) IntegerDivider)) * 16)+0.5
2.2.4 USART_WordLength
USART_WordLength 提示了在一个帧中传输或者接收到的数据位数。
USART_WordLength 定义
| USART_WordLength | 描述 |
|---|---|
| USART_WordLength_8b | 8 位数据 |
| USART_WordLength_9b | 9 位数据 |
2.2.5 USART_StopBits
USART_StopBits 定义了发送的停止位数目。
USART_StopBits 定义
| USART_StopBits | 描述 |
|---|---|
| USART_StopBits_0.5 | 在帧结尾传输 0.5 个停止位 |
| USART_StopBits_1 | 在帧结尾传输 1 个停止位 |
| USART_StopBits_1.5 | 在帧结尾传输 1.5 个停止位 |
| USART_StopBits_2 | 在帧结尾传输 2 个停止位 |
2.2.6 USART_Parity
USART_Parity 定义了奇偶模式。
USART_Parity 定义
| USART_Parity | 描述 |
|---|---|
| USART_Parity_No | 奇偶失能 |
| USART_Parity_Even | 偶模式 |
| USART_Parity_Odd | 奇模式 |
注意:奇偶校验一旦使能,在发送数据的 MSB 位插入经计算的奇偶位(字长 9 位时的第 9 位,字长 8 位
时的第 8 位)。
2.2.7 USART_HardwareFlowControl
USART_HardwareFlowControl 指定了硬件流控制模式使能还是失能。
USART_HardwareFlowControl 定义
| USART_HardwareFlowControl | 描述 |
|---|---|
| USART_HardwareFlowControl_None | 硬件流控制失能 |
| USART_HardwareFlowControl_RTS | 发送请求 RTS 使能 |
| USART_HardwareFlowControl_CTS | 清除发送 CTS 使能 |
| USART_HardwareFlowControl_RTS_CTS | RTS 和 CTS 使能 |
2.2.8 USART_Mode
USART_Mode 指定了使能或者失能发送和接收模式。
USART_Mode 定义
| USART_Mode | 描述 |
|---|---|
| USART_Mode_Tx | 发送使能 |
| USART_Mode_Rx | 接收使能 |
2.2.9 USART_CLOCK
USART_CLOCK 提示了 USART 时钟使能还是失能。
USART_CLOCK 定义
| USART_CLOCK | 描述 |
|---|---|
| USART_Clock_Enable | 时钟高电平活动 |
| USART_Clock_Disable | 时钟低电平活动 |
2.2.10 USART_CPOL
USART_CPOL 指定了下 SLCK 引脚上时钟输出的极性。
USART_CPOL 定义
| USART_CPOL | 描述 |
|---|---|
| USART_CPOL_High | 时钟高电平 |
| USART_CPOL_Low | 时钟低电平 |
2.2.11 USART_CPHA
USART_CPHA 指定了下 SLCK 引脚上时钟输出的相位,和 CPOL 位一起配合来产生用户希望的时钟/数据的采样关系。
USART_CPHA 定义
| USART_CPHA | 描述 |
|---|---|
| USART_CPHA_1Edge | 时钟第一个边沿进行数据捕获 |
| USART_CPHA_2Edge | 时钟第二个边沿进行数据捕获 |
2.2.12 USART_LastBit
USART_LastBit 来控制是否在同步模式下,在 SCLK 引脚上输出最后发送的那个数据字 (MSB)对应的时钟脉冲。
USART_LastBit 定义
| USART_LastBit | 描述 |
|---|---|
| USART_LastBit_Disable | 最后一位数据的时钟脉冲不从 SCLK 输出 |
| USART_LastBit_Enable | 最后一位数据的时钟脉冲从 SCLK 输出 |
代码如下(示例):
/* 下面的示例说明如何配置USART1*/USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = 115200;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_Odd; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_RTS_CTS;USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_InitStructure.USART_Clock = USART_Clock_Disable;USART_InitStructure.USART_CPOL = USART_CPOL_High; USART_InitStructure.USART_CPHA = USART_CPHA_1Edge;USART_InitStructure.USART_LastBit = USART_LastBit_Enable;USART_Init(USART1, &USART_InitStructure);
2.3 库函数 USART_StructInit
| 函数名 | USART_StructInit |
|---|---|
| 函数原形 | void USART_StructInit(USART_InitTypeDef* USART_InitStruct) |
| 功能描述 | 把 USART_InitStruct 中的每一个参数按默认值填入 |
| 输入参数 | USART_InitStruct:指向结构 USART_InitTypeDef 的指针,待初始化 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.3.1 USART_InitStruct 默认值
| 成员 | 默认值 |
|---|---|
| USART_BaudRate | 9600 |
| USART_WordLength | USART_WordLength_8b |
| USART_StopBits | USART_StopBits_1 |
| USART_Parity | USART_Parity_No |
| USART_HardwareFlowControl | USART_HardwareFlowControl_None |
| USART_Mode | USART_Mode_Rx |
| USART_Clock | USART_Clock_Disable |
| USART_CPOL | USART_CPOL_Low |
| USART_CPHA | USART_CPHA_1Edge |
| USART_LastBit | USART_LastBit_Disable |
代码如下(示例):
/*下面的例子说明了如何初始化USART_InitTypeDef结构 */
USART_InitTypeDef USART_InitStructure;
USART_StructInit(&USART_InitStructure);
2.4 库USART_ClockInit
注:该函数是F4系列单片机的函数。
| 函数名 | USART_ClockInit |
|---|---|
| 函数原形 | void USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct) |
| 功能描述 | 初始化USARTx外围时钟 |
| 输入参数 1 | USARTx:其中x可以是1、2、3或6来选择USART外设 |
| 输出参数 2 | 指向usart_clockkinittypedef结构的指针,包含指定USART外设的配置信息。 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.4.1 USART_ClockInitTypeDef
typedef struct
{
uint16_t USART_Clock;
uint16_t USART_CPOL;
uint16_t USART_CPHA;
uint16_t USART_LastBit;
} USART_ClockInitTypeDef;
2.4.2 USART_Clock 时钟使能控制
USART_Clock 该参数指定USART时钟是启用还是禁用。如果使用同步模式发送,一般都
需要开启时钟。它设定USART_CR2 寄存器的CLKEN 位的值。
USART_Clock 定义
| USART_Clock | 描述 |
|---|---|
| USART_Clock_Disable | 时钟高电平活动 |
| USART_Clock_Enable | 时钟低电平活动 |
2.4.3 USART_CPOL 时钟极性
USART_CPOL 该参数指定串行时钟的稳定状态, 即空闲的时候是高电平还是低电平。它设定USART_CR2 寄存器的CPOL位的值。
USART_CPOL定义
| USART_CPOL | 描述 |
|---|---|
| USART_CPOL_Low | 时钟低电平 |
| USART_CPOL_High | 时钟高电平 |
2.4.4 USART_CPHA 时钟相位
USART_CPHA该参数指定进行位捕获的时钟转换。同步模式下SCLK 引脚上输出时钟相位设置,可设置在时钟第一个变化沿捕获数据(USART_CPHA_1Edge) 或在时钟第二个变化沿捕获数据。它设定USART_CR2 寄存器的CPHA 位的值。USART_CPHA 与USART_CPOL 配合使用可以获得多种模式时钟关系。
USART_CPHA定义
| USART_CPHA | 描述 |
|---|---|
| USART_CPHA_1Edge | 时钟第一个边沿进行数据捕获 |
| USART_CPHA_2Edge | 时钟第二个边沿进行数据捕获 |
2.4.5 USART_LastBit 最尾位时钟脉冲
指定上次发送的时钟脉冲是否对应数据位(MSB)必须以同步模式在SCLK引脚上输出。选择在发送最后一个数据位的时候时钟脉冲是否在SCLK 引脚输出,可以是不输出脉冲(USART_LastBit_Disable)、输出脉冲(USART_LastBit_Enable)。它设定USART_CR2 寄存器的LBCL 位的值。
USART_LastBit定义
| USART_LastBit | 描述 |
|---|---|
| USART_LastBit_Disable | 最后一位数据的时钟脉冲不从 SCLK 输出 |
| USART_LastBit_Enable | 最后一位数据的时钟脉冲从 SCLK 输出 |
代码如下(示例):
/* 下面的示例说明如何配置USART1 的时钟*/USART_ClockInitTypeDef USART_ClockInitStructure; USART_ClockInitStructure.USART_Clock= USART_Clock_Disable;USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;USART_ClockInitStructure.USART_CPHA= USART_CPHA_1Edge; USART_ClockInitStructure.USART_LastBit = USART_CPHA_1Edge; SART_Init(USART1, &USART_ClockInitStructure);
2.5 库函数 USART_ClockStructInit
注:该函数是F4系列单片机的函数。
| 函数名 | USART_ClockStructInit |
|---|---|
| 函数原形 | void USART_ClockStructInit(USART_ClockInitTypeDef* USART_ClockInitStruct) |
| 功能描述 | 把 USART_InitStruct 中的每一个参数按默认值填入 |
| 输入参数 | USART_ClockInitStruct :指向结构 USART_ClockInitTypeDef的指针,待初始化 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.5.1 USART_ClockInitTypeDef 默认值
| 成员 | 默认值 |
|---|---|
| USART_Clock | USART_Clock_Disable |
| USART_CPOL | USART_CPOL_Low |
| USART_CPHA | USART_CPHA_1Edge |
| USART_LastBit | USART_LastBit_Disable |
代码如下(示例):
/* 下面的示例说明如何配置USART1 的时钟*/USART_ClockInitTypeDef USART_ClockInitStructure; USART_ClockStructInit(&USART_ClockInitStructure);
2.6 库函数 USART_ Cmd
| 函数名 | USART_ Cmd |
|---|---|
| 函数原形 | void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState) |
| 功能描述 | 使能或者失能 USART 外设 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | NewState: 外设 USARTx 的新状态;这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 使能 USART1 */USART_Cmd(USART1, ENABLE);
2.7 库函数 USART_SetPrescaler
| 函数名 | USART_SetPrescaler |
|---|---|
| 函数原形 | void USART_SetPrescaler(USART_TypeDef* USARTx, u8 USART_Prescaler) |
| 功能描述 | 设置 USART 时钟预分频 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_Prescaler: 时钟预分频 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 设置系统时钟预分频为0x56 */
USART_SetPrescaler(0x56);
2.8 库函数 USART_OverSampling8Cmd
| 函数名 | USART_OverSampling8Cmd |
|---|---|
| 函数原形 | void USART_OverSampling8Cmd(USART_TypeDef* USARTx, FunctionalState NewState) |
| 功能描述 | 启用或禁用USART的8倍过采样模式 |
| 输入参数 1 | USARTx:x 可以是 1~8,来选择 USART 外设 |
| 输入参数 2 | NewState: USART 8倍过采样模式的新状态。该参数包括:ENABLE或DISABLE。 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 启用USART1 的8倍过采样模式 */
USART_OverSampling8Cmd(usart1,ENABLE);
2.9 库函数 USART_OneBitMethodCmd
| 函数名 | USART_OneBitMethodCmd |
|---|---|
| 函数原形 | void USART_OneBitMethodCmd(USART_TypeDef* USARTx, FunctionalState NewState) |
| 功能描述 | 启用或禁用USART的一位采样方法 |
| 输入参数 1 | USARTx:x 可以是 1~8,来选择 USART 外设 |
| 输入参数 2 | NewState: USART 8倍过采样模式的新状态。该参数包括:ENABLE或DISABLE。 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 启用USART的一位采样方法 */
USART_OneBitMethodCmd(usart1,ENABLE);
2.10 库函数 USART_SendData
| 函数名 | USART_ SendData |
|---|---|
| 函数原形 | void USART_SendData(USART_TypeDef* USARTx, u8 Data) |
| 功能描述 | 通过外设 USARTx 发送单个数据 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | Data: 待发送的数据 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 在USART3上发送一个 0x26*/
USART_SendData(USART3, 0x26);
2.11 函数USART_ReceiveData
| 函数名 | USART_ ReceiveData |
|---|---|
| 函数原形 | u8 USART_ReceiveData(USART_TypeDef* USARTx) |
| 功能描述 | 返回 USARTx 最近接收到的数据 |
| 输入参数 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输出参数 | 无 |
| 返回值 | 接收到的字 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 在USART2上收到数据,保存RxData */
u16 RxData;
RxData = USART_ReceiveData(USART2);
2.12 函数 USART_SetAddress
| 函数名 | USART_SetAddress |
|---|---|
| 函数原形 | void USART_SetAddress(USART_TypeDef* USARTx, u8 USART_Address) |
| 功能描述 | 设置 USART 节点的地址 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_Address:提示 USART 节点的地址。 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 将USART2地址节点设置为0x5 */USART_SetAddress(USART2, 0x5);
2.13 库函数 USART_WakeUpConfig
| 函数名 | USART_WakeUpConfig |
|---|---|
| 函数原形 | void USART_WakeUpConfig(USART_TypeDef* USARTx, u16 USART_WakeUp) |
| 功能描述 | 选择 USART 的唤醒方式 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_WakeUp:USART 的唤醒方式 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.13.1 USART_WakeUp
USART_WakeUp选择USART的唤醒方式。
USART_WakeUp 值
| USART_WakeUp | 描述 |
|---|---|
| USART_WakeUp_IdleLine | 空闲总线唤醒 |
| USART_WakeUp_AddressMark | 地址标记唤醒 |
代码如下(示例):
/* 选择IDLE线路作为USART1唤醒 */USART_WakeUpConfig(USART1, USART_WakeUpIdleLine);
2.14 库函数 USART_ReceiverWakeUpCmd
| 函数名 | USART_ReceiverWakeUpCmd |
|---|---|
| 函数原形 | void USART_ReceiverWakeUpCmd(USART_TypeDef* USARTx, FunctionalState Newstate) |
| 功能描述 | 检查 USART 是否处于静默模式 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | NewState: USART 静默模式的新状态;这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*USART3在正常模式 */USART_ReceiverWakeUpCmd(USART3, DISABLE);
2.15 库函数 USART_LINBreakDetectiLengthConfig
| 函数名 | USART_LINBreakDetectiLengthConfig |
|---|---|
| 函数原形 | void USART_LINBreakDetectLengthConfig(USART_TypeDef* USARTx, u16 USART_LINBreakDetectLength) |
| 功能描述 | 设置 USART LIN 中断检测长度 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_LINBreakDetectLength:LIN 中断检测长度; |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.15.1 USART_LINBreakDetectLength
USART_LINBreakDetectLength选择USART的唤醒方式。
USART_LINBreakDetectLength 值
| USART_LINBreakDetectLength | 描述 |
|---|---|
| USART_LINBreakDetectLength_10b | 10 位中断检测 |
| USART_LINBreakDetectLength_11b | 11 位中断检测 |
代码如下(示例):
/* 为USART1选择10位中断检测 */
USART_LINBreakDetectLengthConfig(USART1, USART_LINDetectLength_10b);
2.16 库函数 USART_LINCmd
| 函数名 | USART_LINCmd |
|---|---|
| 函数原形 | void USART_LINCmd(USART_TypeDef* USARTx, FunctionalState Newstate) |
| 功能描述 | 使能或者失能 USARTx 的 LIN 模式 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | NewState: USART LIN 模式的新状态这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*开启USART2 LIN模式 */
USART_LINCmd(USART2, ENABLE);
2.17 库函数 USART_SendBreak
| 函数名 | USART_SendBreak |
|---|---|
| 函数原形 | void USART_SendBreak(USART_TypeDef* USARTx) |
| 功能描述 | 发送中断字 |
| 输入参数 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/* 在USART1上发送中断字符 */
USART_SendBreak(USART1);
2.18 库函数 USART_HalfDuplexCmd
| 函数名 | USART_HalfDuplexCmd |
|---|---|
| 函数原形 | void USART_HalfDuplexCmd(USART_TypeDef* USARTx, FunctionalState Newstate) |
| 功能描述 | 使能或者失能 USART 半双工模式 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | NewState: USART 半双工模式传输的新状态;这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*使能USART2的半双工模式 */
USART_HalfDuplexCmd(USART2, ENABLE);
2.19 库函数 USART_SmartCardCmd
| 函数名 | USART_SmartCardCmd |
|---|---|
| 函数原形 | void USART_SmartCardCmd(USART_TypeDef* USARTx, FunctionalState Newstate) |
| 功能描述 | 使能或者失能指定 USART 的智能卡模式 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | NewState: USART 智能卡模式的新状态;这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*启用USART1智能卡模式 */
USART_HalfDuplexCmd(USART2, ENABLE);
2.20 库函数 USART_SmartCardNackCmd
| 函数名 | USART_SmartCardNackCmd |
|---|---|
| 函数原形 | void USART_SmartCardNACKCmd(USART_TypeDef* USARTx, FunctionalState Newstate) |
| 功能描述 | 使能或者失能 NACK 传输 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | NewState: NACK 传输的新状态;这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*在奇偶校验错误时启用USART1 NACK传输*/
USART_SmartCardNACKCmd(USART1, ENABLE);
2.21 库函数 USART_SetGuardTime
| 函数名 | USART_SetGuardTime |
|---|---|
| 函数原形 | void USART_SetGuardTime(USART_TypeDef* USARTx, u8 USART_GuardTime) |
| 功能描述 | 设置指定的 USART 保护时间 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_GuardTime: 指定的保护时间 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*设置守护时间为0x78 */
USART_SetGuardTime(0x78);
2.22 库函数 USART_IrDAConfig
| 函数名 | USART_IrDAConfig |
|---|---|
| 函数原形 | void USART_IrDAConfig(USART_TypeDef* USARTx, u16 USART_IrDAMode) |
| 功能描述 | 设置 USART IrDA 模式 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_IrDAMode:LIN 中断检测长度 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.22.1 USART_IrDAMode
USART_IrDAMode选择IrDA的模式。
USART_IrDAMode 值
| USART_IrDAMode | 描述 |
|---|---|
| USART_IrDAMode_LowPower | IrDA 低功耗模式 |
| USART_IrDAMode_Normal | IrDA 正常模式 |
代码如下(示例):
/* USART2 IrDA低功耗选择*/
USART_IrDAConfig(USART2,USART_IrDAMode_LowPower);
2.23 库函数 USART_IrDACmd
函数名 | USART_IrDACmd
函数原形 | void USART_IrDACmd(USART_TypeDef* USARTx, FunctionalState Newstate)
功能描述 | 使能或者失能 USART IrDA 模式
输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设
输入参数 2 | NewState: USART IrDA 模式的新状态;这个参数可以取:ENABLE 或者 DISABLE
输出参数 | 无
返回值 | 无
先决条件 | 无
被调用函数 | 无
代码如下(示例):
/*开启USART1 IrDA模式*/
USART_IrDACmd(USART1, ENABLE);
2.24 库函数 USART_ DMACmd
| 函数名 | USART_ DMACmd |
|---|---|
| 函数原形 | USART_DMACmd(USART_TypeDef* USARTx, FunctionalState NewState) |
| 功能描述 | 使能或者失能指定 USART 的 DMA 请求 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_DMAreq:指定 DMA 请求 |
| 输入参数 3 | NewState: USARTx DMA 请求源的新状态;这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.24.1 USART_DMAreq
USART_DMAreq选择待使能或者失能的DMA请求。
USART_LastBit 值
| USART_DMAreq | 描述 |
|---|---|
| USART_DMAReq_Tx | 发送 DMA 请求 |
| USART_DMAReq_Rx | 接收 DMA 请求 |
代码如下(示例):
/*启用USART2的Rx和Tx DMA传输动作*/
USART_DMACmd(USART2, USART_DMAReq_Rx | USART_DMAReq_Tx, ENABLE);
2.25 库函数 USART_ITConfig
| 函数名 | USART_ITConfig |
|---|---|
| 函数原形 | void USART_ITConfig(USART_TypeDef* USARTx, u16 USART_IT, FunctionalState NewState) |
| 功能描述 | 使能或者失能指定的 USART 中断 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_IT:待使能或者失能的 USART 中断源 |
| 输入参数 3 | NewState:USARTx 中断的新状态;这个参数可以取:ENABLE 或者 DISABLE |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.25.1 USART_IT
输入参数 USART_IT 使能或者失能 USART 的中断。可以取下表的一个或者多个取值的组合作为该参数的值。
USART_IT 值
| USART_IT | 描述 |
|---|---|
| USART_IT_PE | 奇偶错误中断 |
| USART_IT_TXE | 发送中断 |
| USART_IT_TC | 传输完成中断 |
| USART_IT_RXNE | 接收中断 |
| USART_IT_IDLE | 空闲总线中断 |
| USART_IT_LBD LIN | 中断检测中断 |
| USART_IT_CTS CTS | 中断 |
| USART_IT_ERR | 错误中断 |
代码如下(示例):
/*启用USART1传输中断*/
USART_ITConfig(USART1, USART_IT_Transmit ENABLE);
2.26 库函数 USART_ GetFlagStatus
| 函数名 | USART_ GetFlagStatus |
|---|---|
| 函数原形 | FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, u16 USART_FLAG) |
| 功能描述 | 检查指定的 USART 标志位设置与否 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_FLAG:待检查的 USART 标志位 |
| 输出参数 | 无 |
| 返回值 | USART_FLAG 的新状态(SET 或者 RESET) |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.26.1 USART_FLAG
给出了所有可以被函数USART_ GetFlagStatus检查的标志位列表。
USART_FLAG 值
| USART_FLAG | 描述 |
|---|---|
| USART_FLAG_CTS | CTS 标志位 |
| USART_FLAG_LBD | LIN 中断检测标志位 |
| USART_FLAG_TXE | 发送数据寄存器空标志位 |
| USART_FLAG_TC | 发送完成标志位 |
| USART_FLAG_RXNE | 接收数据寄存器非空标志位 |
| USART_FLAG_IDLE | 空闲总线标志位 |
| USART_FLAG_ORE | 溢出错误标志位 |
| USART_FLAG_NE | 噪声错误标志位 |
| USART_FLAG_FE | 帧错误标志位 |
| USART_FLAG_PE | 奇偶错误标志位 |
代码如下(示例):
/*检查传输数据寄存器是否已满*/
FlagStatus Status;
Status = USART_GetFlagStatus(USART1, USART_FLAG_TXE);
2.27 库函数 USART_ ClearFlag
| 函数名 | USART_ ClearFlag |
|---|---|
| 函数原形 | void USART_ClearFlag(USART_TypeDef* USARTx, u16 USART_FLAG) |
| 功能描述 | 清除 USARTx 的待处理标志位 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_FLAG:待清除的 USART 标志位 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*清除溢出错误标志*/USART_ClearFlag(USART1,USART_FLAG_OR);
2.28 库函数 USART_ GetITStatus
| 函数名 | USART_ GetITStatus |
|---|---|
| 函数原形 | ITStatus USART_GetITStatus(USART_TypeDef* USARTx, u16 USART_IT) |
| 功能描述 | 检查指定的 USART 中断发生与否 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_IT:待检查的 USART 中断源 |
| 输出参数 | 无 |
| 返回值 | USART_IT 的新状态 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
2.28.1 SART_IT
给出了所有可以被函数USART_ GetITStatus检查的中断标志位列表
USART_IT 值
| USART_IT | 描述 |
|---|---|
| USART_IT_PE | 奇偶错误中断 |
| USART_IT_TXE | 发送中断 |
| USART_IT_TC | 发送完成中断 |
| USART_IT_RXNE | 接收中断 |
| USART_IT_IDLE | 空闲总线中断 |
| USART_IT_LBD LIN | 中断探测中断 |
| USART_IT_CTS CTS | 中断 |
| USART_IT_ORE | 溢出错误中断 |
| USART_IT_NE | 噪音错误中断 |
| USART_IT_FE | 帧错误中断 |
代码如下(示例):
/*获取USART1溢出错误中断状态*/
ITStatus ErrorITStatus;
ErrorITStatus = USART_GetITStatus(USART1, USART_IT_OverrunError);
2.29 函数 USART_ ClearITPendingBit
| 函数名 | USART_ ClearITPendingBit |
|---|---|
| 函数原形 | void USART_ClearITPendingBit(USART_TypeDef* USARTx, u16 USART_IT) |
| 功能描述 | 清除 USARTx 的中断待处理位 |
| 输入参数 1 | USARTx:x 可以是 1,2 或者 3,来选择 USART 外设 |
| 输入参数 2 | USART_IT:待检查的 USART 中断源 |
| 输出参数 | 无 |
| 返回值 | 无 |
| 先决条件 | 无 |
| 被调用函数 | 无 |
代码如下(示例):
/*清除溢出错误中断挂起位*/
USART_ClearITPendingBit(USART1,USART_IT_OverrunError);
三 项目中部分函数的使用
3.1 串口1的初始化:
该串口一般都是用于调试使用,以及使用HEX文件通过该串口下载程序。
//bound:波特率
void uart_init(u32 bound){//GPIO端口设置GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟//串口1对应引脚复用映射GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1//USART1端口配置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10//USART1 初始化设置USART_InitStructure.USART_BaudRate = bound;//波特率设置USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串口1USART_Cmd(USART1, ENABLE); //使能串口1 USART_ClearFlag(USART1, USART_FLAG_TC); //清除 串口1 的待处理标志位USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断//Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、}void USART1_IRQHandler(void) //串口1中断服务程序
{u8 Res;if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾){Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据if((USART_RX_STA&0x8000)==0)//接收未完成{if(USART_RX_STA&0x4000)//接收到了0x0d{if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始else USART_RX_STA|=0x8000; //接收完成了 }else //还没收到0X0D{ if(Res==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收 } }} }
} 3.2 串口2-RS232初始化
我公司的ARM板 串口2芯片是232。
u8 RS232_RX_BUF[RS232_RX_BUFSIZE];
u16 RS232_RX_CNT=0;
void USART2_IRQHandler(void)//串口2中断服务程序
{u8 res;OSIntEnter(); if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) {res=USART_ReceiveData(USART2); if(RS232_RX_CNT<RS232_RX_BUFSIZE){RS232_RX_BUF[RS232_RX_CNT]=res;RS232_RX_CNT++;}} USART_ClearITPendingBit(USART2,USART_IT_RXNE);OSIntExit();
} //bound:波特率
void Usart2_Init(u32 bound)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//PA2 TX PA3 RXGPIO_PinAFConfig(GPIOD,GPIO_PinSource5,GPIO_AF_USART2); //GPIOD5复用为USART2GPIO_PinAFConfig(GPIOD,GPIO_PinSource6,GPIO_AF_USART2); //GPIOD6复用为USART2GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5|GPIO_Pin_6;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF;GPIO_InitStructure.GPIO_OType=GPIO_OType_PP;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_PuPd=GPIO_PuPd_UP;GPIO_Init(GPIOD,&GPIO_InitStructure);USART_InitStructure.USART_BaudRate=bound;USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;USART_InitStructure.USART_Parity=USART_Parity_No;USART_InitStructure.USART_StopBits=USART_StopBits_1;USART_InitStructure.USART_WordLength=USART_WordLength_8b;USART_Init(USART2,&USART_InitStructure);USART_Cmd(USART2, ENABLE); //使能串口1 // USART_ClearFlag(USART2, USART_FLAG_TC);USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启相关中断//Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//串口1中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority =1; //子优先级1NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}void usart2_senddata(u8 *buf,u8 len)
{u8 t;for(t=0;t<len;t++){while(USART_GetFlagStatus(USART2,USART_FLAG_TC)==RESET){};USART_SendData(USART2,buf[t]);}
}void RS232_Receive_Data(u8 *buf,u16 len)
{u16 rxlen=len;u16 i=0;if(rxlen==RS232_RX_CNT){for(i=0;i<rxlen;i++){buf[i]=RS232_RX_BUF[i];}RS232_RX_CNT=0;}
}3.2 串口2-RS485初始化
正点原子的开发板 串口2的芯片是485。
#if EN_USART2_RX //如果使能了接收
//接收缓存区
u8 RS485_RX_BUF[64]; //接收缓冲,最大64个字节.
//接收到的数据长度
u8 RS485_RX_CNT=0;
void USART2_IRQHandler(void)
{u8 res; if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)//接收到数据{ res =USART_ReceiveData(USART2);//;读取接收到的数据USART2->DRif(RS485_RX_CNT<64){RS485_RX_BUF[RS485_RX_CNT]=res; //记录接收到的值RS485_RX_CNT++; //接收数据增加1 } }
}
#endif
//初始化IO 串口2
//bound:波特率
void RS485_Init(u32 bound)
{ GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟//串口2引脚复用映射GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2); //GPIOA2复用为USART2GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2); //GPIOA3复用为USART2//USART2 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3; //GPIOA2与GPIOA3GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA2,PA3//PG8推挽输出,485模式控制 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //GPIOG8GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHzGPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_Init(GPIOG,&GPIO_InitStructure); //初始化PG8//USART2 初始化设置USART_InitStructure.USART_BaudRate = bound;//波特率设置USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART2, &USART_InitStructure); //初始化串口2USART_Cmd(USART2, ENABLE); //使能串口 2USART_ClearFlag(USART2, USART_FLAG_TC);#if EN_USART2_RX USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启接受中断//Usart2 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、#endif RS485_TX_EN=0; //默认为接收模式
}//RS485发送len个字节.
//buf:发送区首地址
//len:发送的字节数(为了和本代码的接收匹配,这里建议不要超过64个字节)
void RS485_Send_Data(u8 *buf,u8 len)
{u8 t;RS485_TX_EN=1; //设置为发送模式for(t=0;t<len;t++) //循环发送数据{while(USART_GetFlagStatus(USART2,USART_FLAG_TC)==RESET); //等待发送结束 USART_SendData(USART2,buf[t]); //发送数据} while(USART_GetFlagStatus(USART2,USART_FLAG_TC)==RESET); //等待发送结束 RS485_RX_CNT=0; RS485_TX_EN=0; //设置为接收模式
}
//RS485查询接收到的数据
//buf:接收缓存首地址
//len:读到的数据长度
void RS485_Receive_Data(u8 *buf,u8 *len)
{u8 rxlen=RS485_RX_CNT;u8 i=0;*len=0; //默认为0delay_ms(10); //等待10ms,连续超过10ms没有接收到一个数据,则认为接收结束if(rxlen==RS485_RX_CNT&&rxlen)//接收到了数据,且接收完成了{for(i=0;i<rxlen;i++){buf[i]=RS485_RX_BUF[i]; } *len=RS485_RX_CNT; //记录本次数据长度RS485_RX_CNT=0; //清零}
}
该文档修改记录:
| 修改时间 | 修改说明 |
|---|---|
| 2023年3月1日 | 第一次发布,介绍了STM32通用同步异步收发器(USART、串口)所有函数的介绍及使用 |
总结
以上就是2 STM32库函数之通用同步异步收发器(USART、串口)所有函数的介绍及使用的内容,本文介绍了通用同步异步收发器(USART、串口))所有函数的简单使用。
有不明白的地方欢迎留言;有建议欢迎留言,我后面编写文档好改进。
创作不容,如果文档对您有帮助,记得给个赞。
相关文章:
所有函数的介绍及使用)
2 STM32库函数 之 通用同步异步收发器(USART、串口)所有函数的介绍及使用
2 STM32库函数 之 通用同步异步收发器(USART、串口)所有函数的介绍及使用 前言一、USART固件库函数预览二、USART固件库函数具体介绍2.1 库函数 USART_DeInit2.2 库函数 USART_Init2.2.1 USART_InitTypeDef structure2.2.2 USART_InitTypeDef 成员 USART…...

SpringCloudAlibaba整合Sentinel实现流量控制熔断降级
目录 一、概念 二、整合Sentinel控制台 三、Sentinel规则配置 四、@SentinelResource资源保护注解...
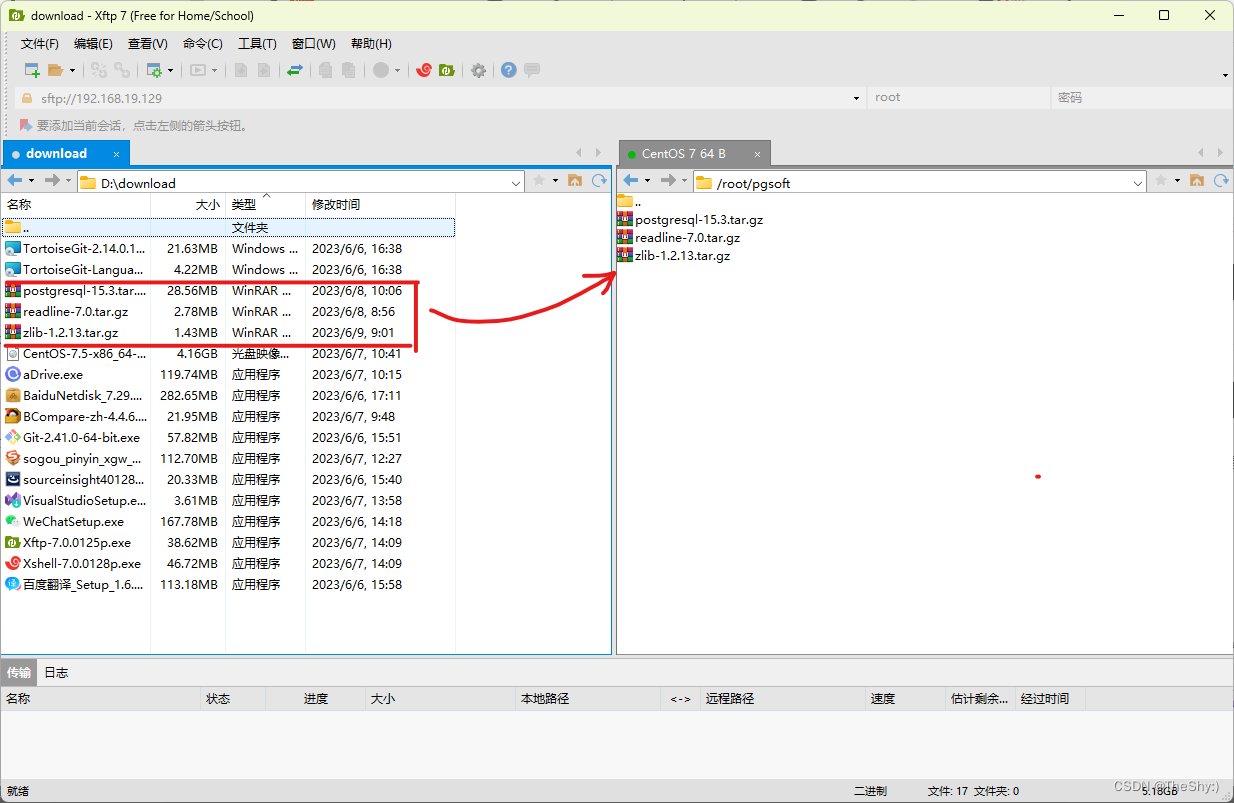
CentOS 7安装 Postgre
零、前置条件 系统CentOS 7,并已联网,已安装gcc或者g编译器,GNU make版本3.80或以上,系统有至少一个除root之外的普通用户user gcc安装-参考链接查看make命令的版本——make --version更新make版本-参考链接postgresql的使用一般…...

rpc 异步非阻塞 io 配置 线程池和队列
相关 雪崩 - 如何重试 - sla和重试风暴的双保证_个人渣记录仅为自己搜索用的博客-CSDN博客 接口耗时公式 耗时 cpu时间 io时间 线程池数量 最佳数目 1s / 平均cpu时间 * 内核数. 最大平均cpu时间 接口耗时- all外部io时间. 结合gc , linux本身其他线程, 只会还少点. …...
【Turfjs的java版本JTS】前面讲了Turfjs可以实现几何计算,空间计算的功能,如果后端要做这项功能也有类似的类库,JTS
JTS Java Topology Suite 几何计算: 1. 前端js就用这个 Turfjs的类库。参考网站: 计算两线段相交点 | Turf.js中文网 2. 后端java语言就可以用 JTS这个类库,参考网站: JTS参考网站: 1. https://github.com/locatio…...
从Window中先多瞥几眼
JavaFx17官方文档中有如下的描述: Window类是一个顶层窗口类,在其中可以承载场景,并与用户交互。窗口可以是Stage、PopupWindow或其他类似的顶层窗口。 JavaFX Stage类是顶级的JavaFX容器。初级阶段由平台搭建。其他Stage对象可以由应用程序构造。 许多Stage属性是只读的…...
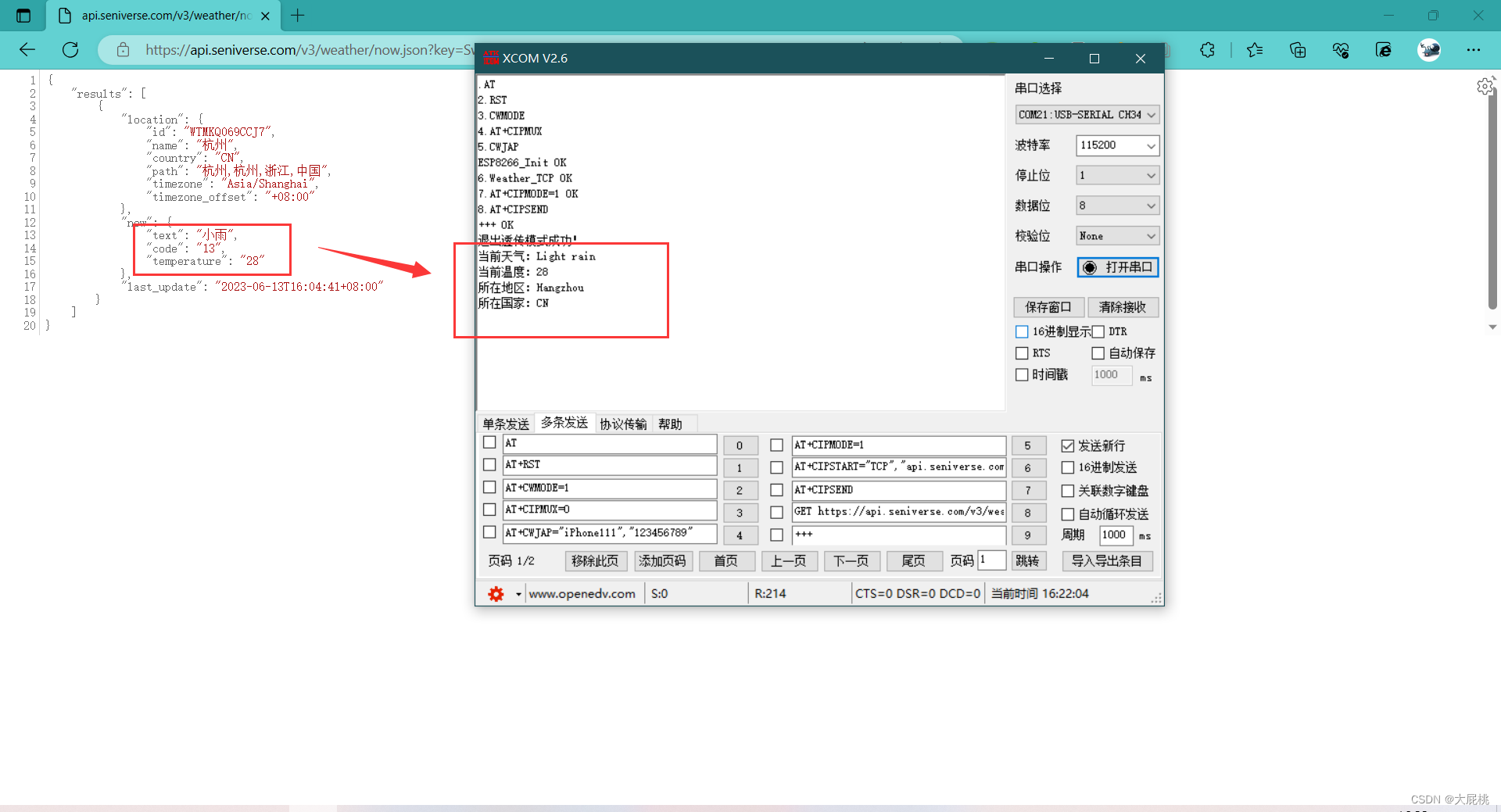
【STM32训练—WiFi模块】第二篇、STM32驱动ESP8266WiFi模块获取天气
目录 第一部分、前言 1、获取心知天气API接口 2、硬件准备 第二部分、电脑串口助手调试WIFI模块获取天气 1、ESP8266获取天气的流程 2、具体步骤 第三部分、STM32驱动ESP8266模块获取天气数据 1、天气数据的解析 1.1、什么函数来解析天气数据? 2.1、解析后…...
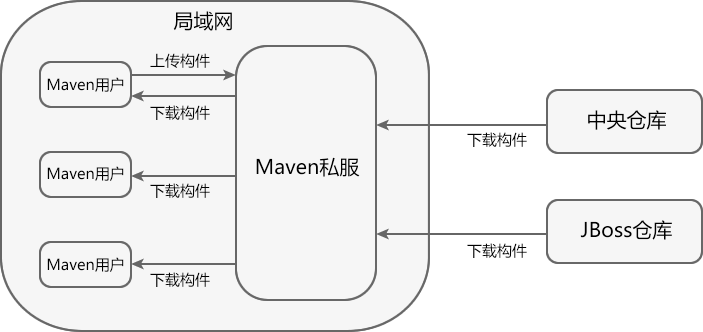
Maven私服
Maven 私服是一种特殊的远程仓库,它是架设在局域网内的仓库服务,用来代理位于外部的远程仓库(中央仓库、其他远程公共仓库)。 建立了 Maven 私服后,当局域网内的用户需要某个构件时,会按照如下顺序进行请求…...
手写RPC总结篇
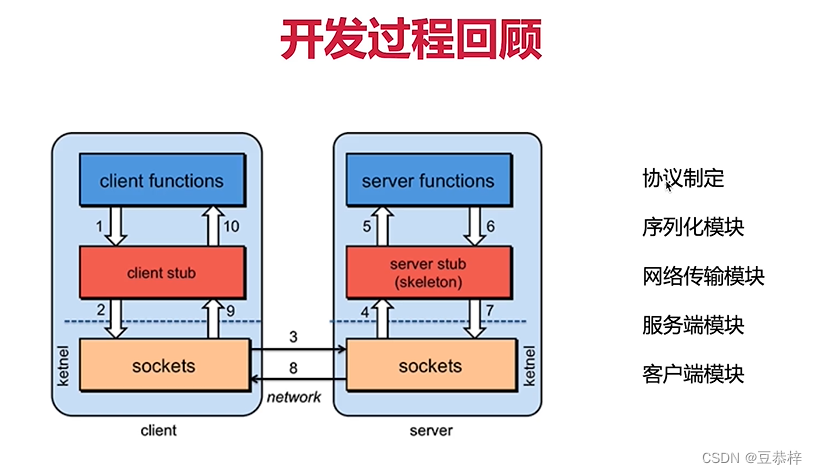
协议制定:client到server做交互的通信协议,比如request response 网络端点peer 难点1 : Jetty嵌入 ◆jetty Server ◆ServletContextHandler ◆ServletHolder jetty server 起到网络监听的作用ServletContextHandler注册到jetty server中ServletHolde…...
(std::ios_base)成员类型与常量)
c++11 标准模板(STL)(std::ios_base)成员类型与常量
流打开模式类型 std::ios_base::openmode typedef /*implementation defined*/ openmode; static constexpr openmode app /*implementation defined*/ static constexpr openmode binary /*implementation defined*/ static constexpr openmode in /*implementation defi…...
)
我用 ChatGPT 写 2023 高考语文作文:全国卷(一)
【2023】新高考|卷 “好的故事,可以帮我们更好地表达和沟通,可以触动心灵、启迪智慧:好的故事以改变一个人的命运,可以展现一个民族的形象故事是有力量的。” 以上材料引发了你怎样的联想和思考?请写一篇文章 要求&…...

4.java转义符,javadoc 标签
java常用转义字符 在控制台,输入tab键,可以实现命令补全 (如何解决cmd中Tab键不能自动补充的问题?百度一下) \t : 一个制表符,实现对齐功能\n : 换行符\ \ : 一个\\ " :一个"\ ’ : 一个’\r : 一个回车 …...
PinYin4j库的使用
一、PinYin4j库简介 1、PinYin4j简介 Pinyin4j 是一个流行的 Java 库,支持汉字和大多数流行的拼音系统之间的转换(汉语拼音,罗马拼音等)。可自定义拼音输出格式,功能强大。 官网地址:http://pinyin4j.sou…...
日志框架 --- Logback
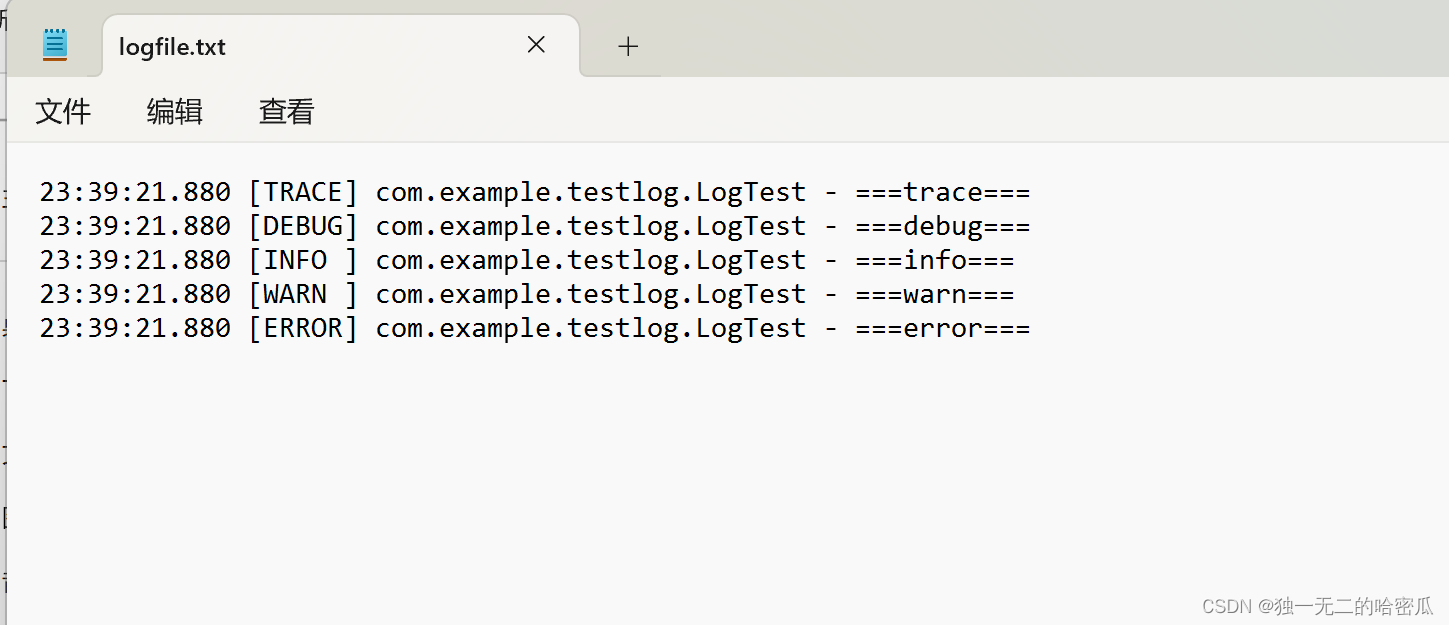
文章目录 1. 什么是logback2. logback的日志级别3. 日志级别的层级4. logback配置文件4.1 logger标签4.2 root标签4.3 appender标签4.4 filter标签4.5 encoder标签 5. 整体演示5.1 配置文件5.2 运行结果 1. 什么是logback Logback是一个用于Java应用程序的日志框架,…...
QML 与 Python 交互
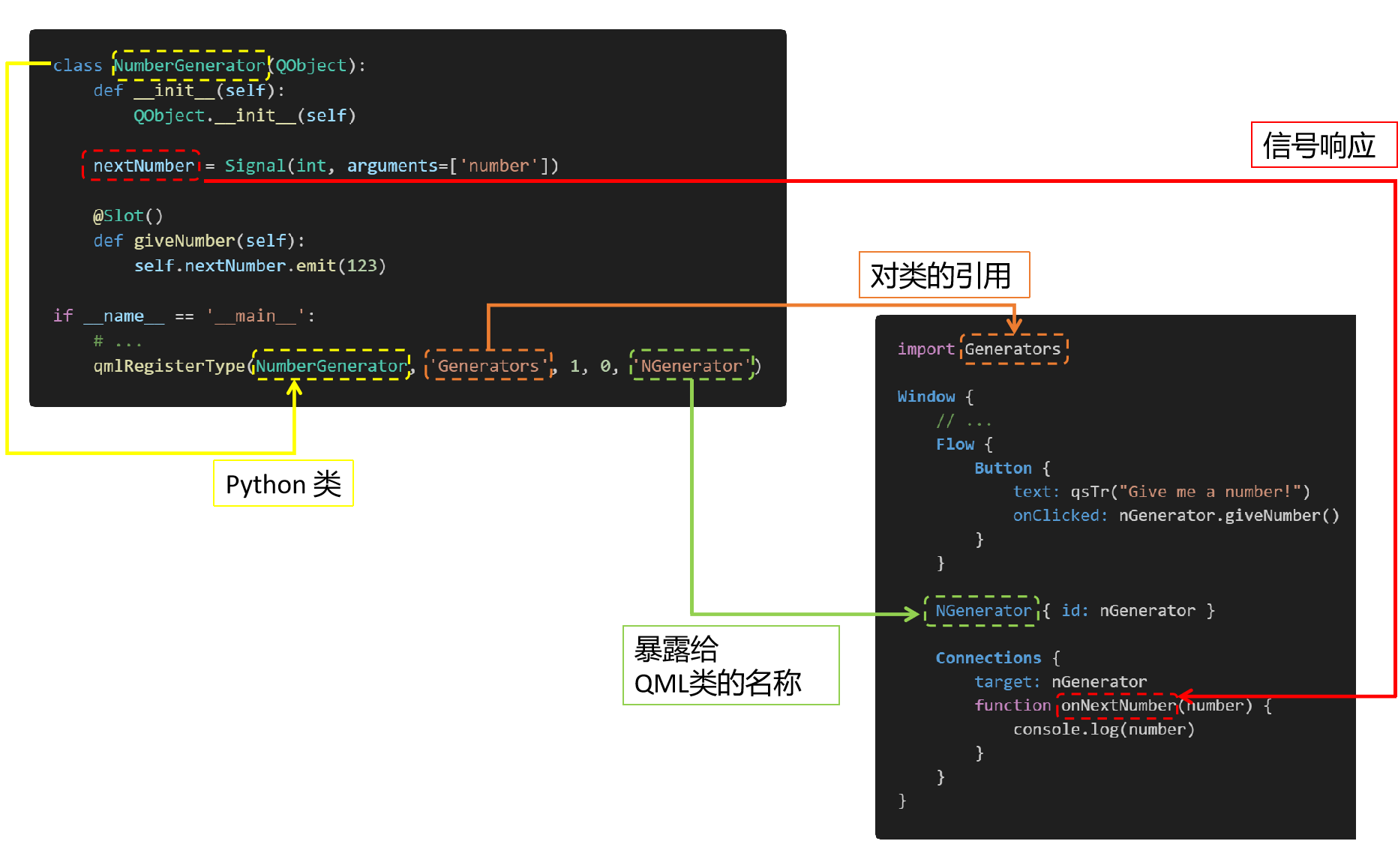
在 Qt 中,C 和 QML 交互一般有如下三种方法 上下文属性:setContextProperty( )向引擎注册类型:调用 qmlRegisterType( )QML 扩展插件:虽然有很大的灵活性,但是用 Python 创建 QML 插件比较麻烦,所以这种方法…...

React基础教程(三):JSX语法
React基础教程(三):JSX语法 1、JSX简介 全称:JavaScript XMLreact定义的一种类似于XML的JS扩展语法:JSXML本质是React.createElement(component, props, ...children)方法的语法糖作用:用来简化创建虚拟DOM(注意&…...
软件测试岗位都是女孩子在做吗?
听我一朋友说,测试岗位基本都是女孩子做。” 不知道是不是以前“软件测试岗”给人印象是“不需要太多技术含量”的错觉,从而大部分外行认为从业软件测试的人员中女生应占了大多数。比如有人就觉得:软件测试主要是细心活,所以女生…...
ARP协议,带你了解ARP协议
目录 一、ARP协议概述 二、使用ARP的四种情况 三、ARP缓存 四、ARP的工作原理 1. 地址解析 2. 地址缓存 五、ARP报文格式 1. ARP请求报文格式 2. ARP响应报文格式 六、免费ARP 七、代理ARP 一、ARP协议概述 ARP(Address Resolution Protocol)地…...
基于Java汽车客运站管理系统设计实现(源码+lw+部署文档+讲解等)
博主介绍: ✌全网粉丝30W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战 ✌ 🍅 文末获取源码联系 🍅 👇🏻 精…...

0203使用规则-索引-MySQL
文章目录 1 联合索引1.1 最左前缀法则1.2 范围查询 2 索引失效2.1 常见情况2.2 数据分布影响 3 SQL提示4 覆盖索引和回表查询5 前缀索引6 单列和联合索引7 设计原则结语 1 联合索引 1.1 最左前缀法则 在Mysql数据库中创建了联合索引(或称复合索引,即包含…...

PS图片文字修改教程 简单几步完美替换文字内容
日常设计、办公、自媒体创作中,我们经常会遇到需要修改图片文字的场景:海报文案调整、截图信息替换、照片文字修正等。很多人苦于改完文字后模糊留痕、背景破损,要么耗时半天还达不到理想效果。今天就给大家分享两种PS改图片文字的实用方法&a…...

你的进化树图够‘炫’吗?从Straight Tree到Circle Tree,用iTOL在线工具5分钟搞定高分文章插图
科研图表升级指南:5分钟打造高颜值进化树可视化 在学术论文和科研报告中,一张精美的进化树图表往往能成为研究成果的"门面担当"。许多研究者花费数月时间完成数据分析,却在最后的可视化环节遭遇瓶颈——默认生成的矩形树图…...

对比按需计费与Token Plan套餐的实际支出感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比按需计费与Token Plan套餐的实际支出感受 1. 引言:两种计费模式的选择 对于个人开发者或小型团队而言,…...

打破设备界限:用Sunshine开源串流工具打造你的家庭游戏云
打破设备界限:用Sunshine开源串流工具打造你的家庭游戏云 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否曾梦想过在客厅大屏上畅玩PC游戏,或在平板上…...
:从参数解析到多维张量展平实战)
nn.Flatten():从参数解析到多维张量展平实战
1. 理解nn.Flatten()的核心作用 当你第一次接触深度学习框架中的nn.Flatten()时,可能会觉得这个函数简单到不需要解释——不就是把多维数据压平吗?但真正用起来就会发现,里面的门道比想象中多得多。我在实际项目中就遇到过因为错误理解展平维…...

如何准备打动评审的物联网与硬件创业技术演讲
1. 从听众到讲者:在EE Live分享你的硬件与物联网洞见如果你是一名电子设计工程师、嵌入式开发者,或者正在硬件创业的浪潮中摸索,那么EE Live这个名字对你来说应该不陌生。这个由EE Times主办的年度盛会,前身是DESIGN West…...

连接器选型五大雷区:从故障数据到设计落地的实战手册
许多硬件团队的失效分析报告显示,连接器引发的现场故障占比长期居高不下,且症状极其隐蔽——间歇性黑屏、信号丢包、热插拔烧毁……这些问题往往在原型测试阶段难以复现,直到批量出货后才集中爆发。本文从电源、高速信号、射频三类典型应用出…...

n8n与Claude集成指南:构建AI代码生成与自动化执行工作流
1. 项目概述与核心价值最近在折腾自动化工作流时,我偶然发现了一个名为n8n-claude-code-guide的开源项目。这个项目乍一看名字,你可能以为它只是一个简单的代码指南,但深入探究后,你会发现它实际上是一个将两个强大的工具——n8n和…...

在多模型间切换时Taotoken路由策略带来的稳定性体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在多模型间切换时Taotoken路由策略带来的稳定性体验 在构建基于大模型的应用时,服务的稳定性是开发者关心的核心问题之…...

深入解析BaiduNetdiskPlugin-macOS:逆向工程破解百度网盘速度限制的技术实践
深入解析BaiduNetdiskPlugin-macOS:逆向工程破解百度网盘速度限制的技术实践 【免费下载链接】BaiduNetdiskPlugin-macOS For macOS.百度网盘 破解SVIP、下载速度限制~ 项目地址: https://gitcode.com/gh_mirrors/ba/BaiduNetdiskPlugin-macOS 在macOS平台上…...