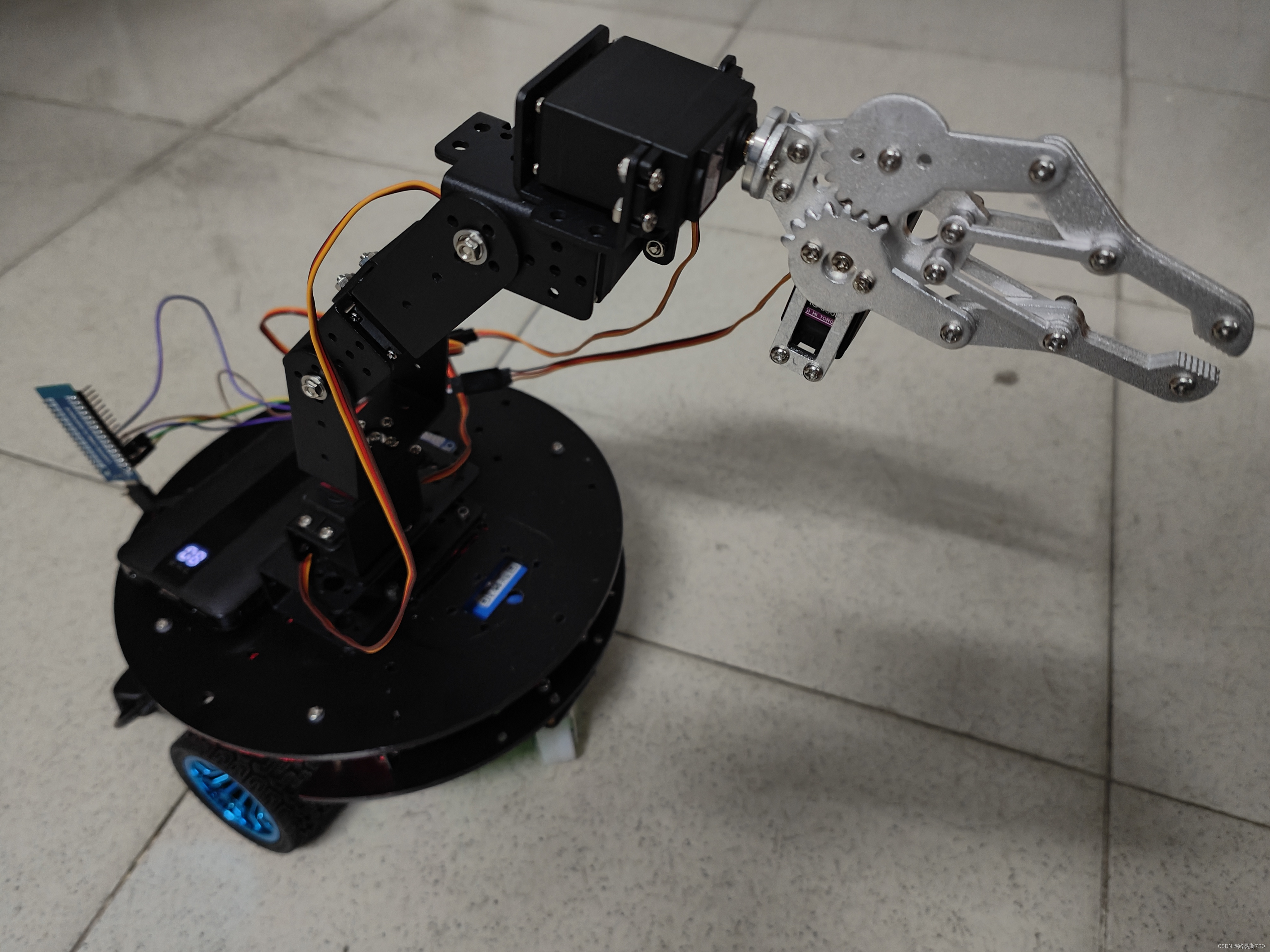
ESP32(MicroPython) 两轮差速五自由度机械臂小车
这次的项目在软件上没多少调整,但本人希望分享一下硬件上的经验。
小车使用两轮差速底盘,驱动轮在小车中间,前后都要万向轮。这种形式可以实现0转弯半径,但受万向轮及用于加高的铜柱的规格限制,两个万向轮难以调到相同高度。考虑铜柱规格,本人万向轮调到比后面的万向轮略高,这样在向前加速时也更稳定。底盘的底板和盖板均使用4mm亚克力板,强度足够。由于重量较轻,在机械臂未指向正前方时可能出现一边车轮抓地效果不好的情况,建议先调整机械臂再行进。
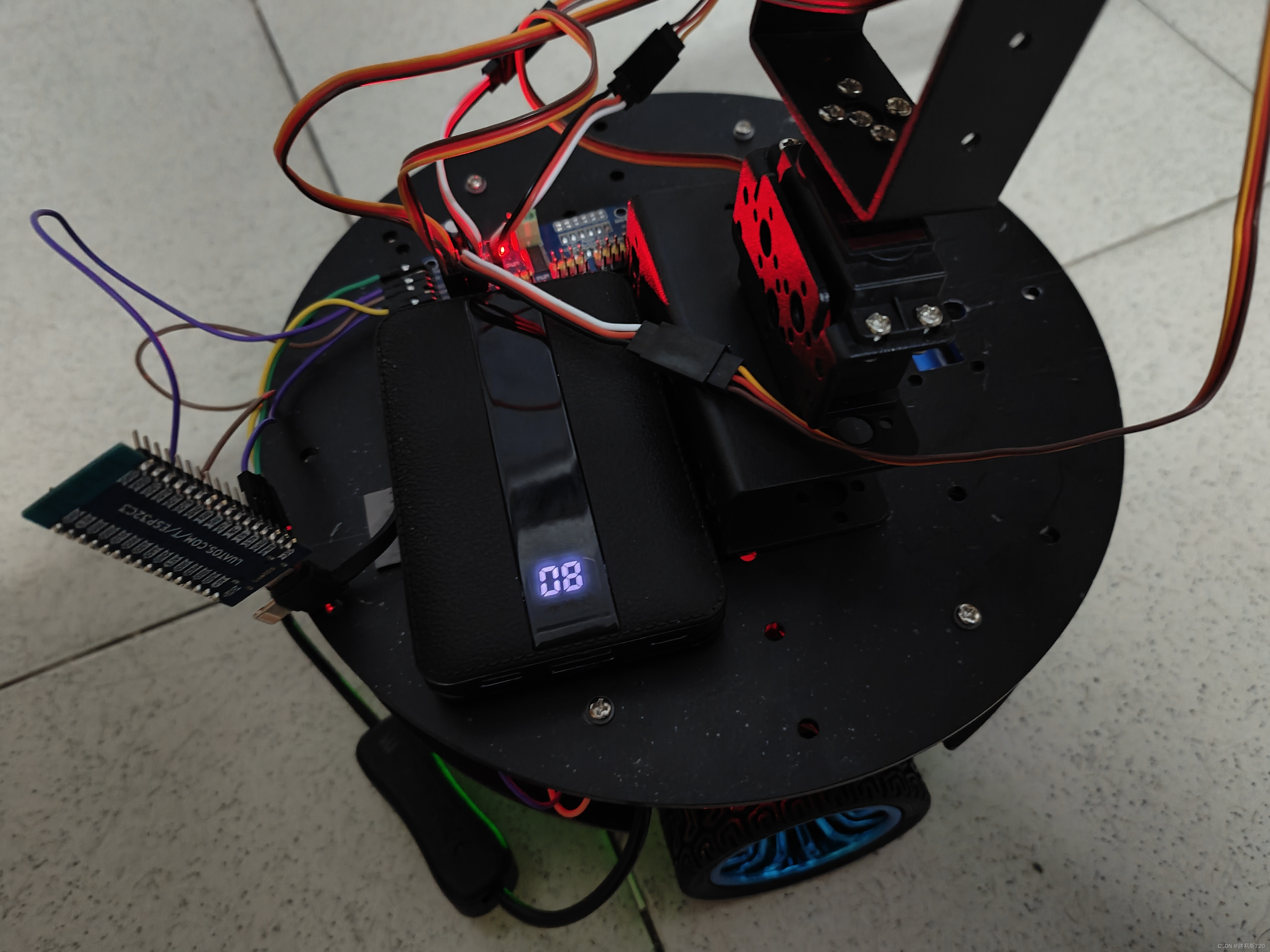
底盘采用闭环控制,由于对实时性要求高,不适合用同一块主控运行网页,因此使用另一块主控提供网页,并通过串口转发指令,此外还开启热点以便在户外连接。由于要给两块主控和两个编码器供电,对12v电池降压有较大压降,AMS1117不能满足需要,就改用性能更高的LM7805降压模块。由于专门的编码器电机驱动尚无标准化设计,性价比较低,本人使用杜邦线连接编码器电机的接口,电机驱动使用经典的L298N。由于搭载机械臂增大了负载,底盘的PID参数调到P=20、I=2,实测相应速度和稳定性良好。
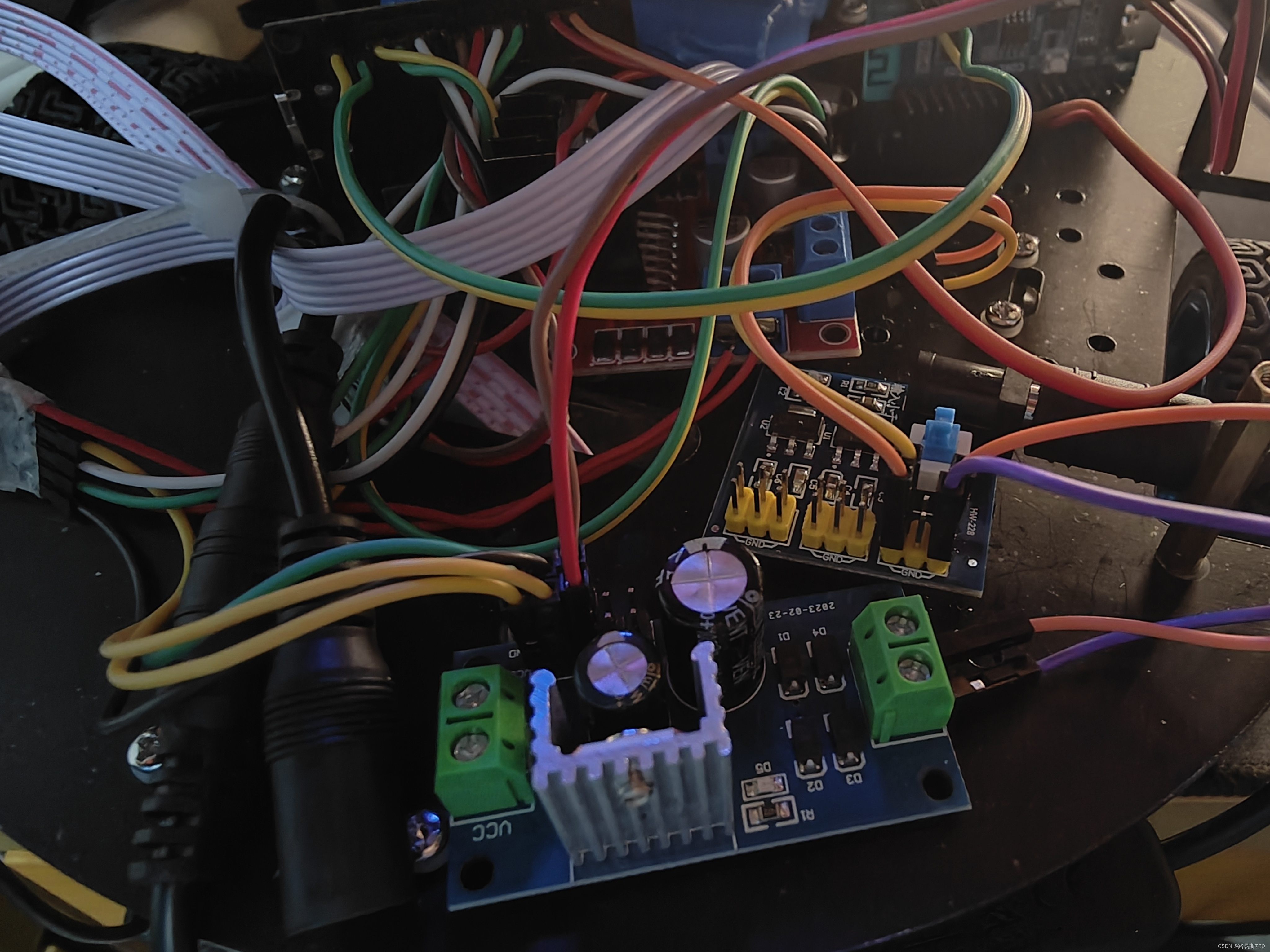
机械臂使用PCA9685进行驱动,舵机为MG996R,由于希望达到6v电压以充分发挥舵机性能,本人尝试了6v电池和使用LM7806对7.4v电池降压的方案,均不能正常运行。之后使用LM7805对7.4v电池降压输出到主控,并由主控输出5v电压到PCA9685,也不能正常运行。最后改用充电宝给主控供电并由主控输出5v电压到PCA9685,可以正常运行。出现这种情况可能是因为PCA9685对电压稳定性要求较高。由于MG996R舵机的线不够长,有3个舵机使用了舵机延长线。为了方便操作,控制机械臂的主控也连接到底盘上的主控发出的热点。本人测试过把这两部分程序合并,但不能正常加载网页,就分两块主控。
相应程序
控制电机的ESP32
from machine import *
import time
from motos import *
import _thread
'''
底盘参数计算(最终结果保留3位有效数字)
(speed为编码器脉冲计数)
轮直径:0.065
轮周长:0.2041
每圈脉冲数:110
底盘周长:0.6908
底盘直径/每rad长:0.22
每次脉冲长度:0.001855
线速度:speed*10*0.001855=speed*0.0186
角速度:(speed1-speed2)*10*0.001855/0.22=(speed1-speed2)*0.0843
考虑丢步情况,大约只有63%的脉冲能被统计,因此公式改为:
线速度=speed/0.63*0.0186=speed*0.0295
角速度=(speed1-speed2)/0.63*0.0843=(speed1-speed2)*0.134
每旋转1度(一边轮静止,另一边旋转)所需脉冲数=0.22*2*3.14/360/0.00186*0.63=1.30
每行驶1米所需脉冲数:1/0.001855*0.63=340
'''
# 编码器初始化
pin17 = Pin(17, Pin.IN)
pin5 = Pin(5, Pin.IN)
encoder1 = encoder1(pin5, pin17, 0) # 参数(编码器A相引脚,编码器B相引脚,定时器序号)
pin19 = Pin(19, Pin.IN)
pin18 = Pin(18, Pin.IN)
encoder2 = encoder2(pin18, pin19, 2)# 电机初始化
motor1=PWM(Pin(15),freq=1000,duty=0)
motor2=PWM(Pin(2),freq=1000,duty=0)
motor3=PWM(Pin(4),freq=1000,duty=0)
motor4=PWM(Pin(16),freq=1000,duty=0)duty1=0
duty2=0
linear_velocity=0
angular_velocity=0
target1=0
target2=0
offset1=0
offset2=0
'''
distance=0
angle=0
target_distance=0
target_angle=0
flag=0
'''def set_target(duty1,duty2):global linear_velocityglobal angular_velocityglobal target1global target2global target_distanceglobal target_angleglobal flagwhile True:try:target=int(input("input"))''' #控制底盘旋转一定角度并前进一定距离,实测不能正常运行,已弃用if target//1000>600: #前3位组成的数大于600时控制行驶距离和旋转角度target_distance=target%1000 #后三位为距离*100target_angle=target//1000-800 #前三位为旋转角度+800,角度为正时右转target_angle=round(target_angle*1.3)target_distance=round(target_distance*0.34)print(target_angle,target_distance)flag=1target=0elif target>0: #前3位组成的数小于600时控制线速度和角速度'''linear_velocity=target%1000-400 #前三位为角速度*100+400,角速度为正时右转,后三位为线速度*100+400angular_velocity=target//1000-400 #换算时数字放大1000倍,除法运算后结果不用缩小target_speed=linear_velocity/2.95 #计算每周期目标脉冲数target_offset=angular_velocity/26.8 #计算每周期目标脉冲数差并换算为每边车轮速度与平均速度的差target1=round(target_speed+target_offset) #左轮目标每周期脉冲数target2=round(target_speed-target_offset) #右轮目标每周期脉冲数target=0except:pass
_thread.start_new_thread(set_target, (duty1, duty2))while True:speed1 = encoder1.read() #编码器读数speed2 = encoder2.read()Offset1=offset1 #记录上一次偏差Offset2=offset2offset1=target1-speed1 offset2=target2-speed2adujstment1=offset1*20-Offset1*18 #PID控制:P=20,I=2adujstment2=offset2*20-Offset2*18duty1+=adujstment1duty2+=adujstment2''' #控制底盘旋转一定角度并前进一定距离,实测不能正常运行,已弃用if flag==1: #指定角度转向print(flag,angle)if 0<target_angle-angle<10 or 0>target_angle-angle>-10:target1=0target2=0flag=2angle=0target_angle=0if target_angle>0: #右转target1=20target2=0angle+=speed1if target_angle<0: #左转target1=0target2=20angle+=speed2if flag==2: #指定距离直行print(flag,distance)if target_distance-distance>400:target1=100target2=100elif target_distance-distance>100:target1=25target2=25elif target_distance-distance>40:target1=10target2=10elif target_distance-distance<15:target1=0target2=0flag=0distance=0target_distance=0distance+=speed1'''if target1<0: #由于实测发现电机反向时不能正常测速,这部分改为开环控制duty1=10*target1if target2<0:duty2=10*target2 if duty1<-1023:duty1=-1023if duty1>1023:duty1=1023if duty2<-1023:duty2=-1023if duty2>1023:duty2=1023if duty1>0:motor1.duty(duty1)motor2.duty(0)if duty1<0:motor1.duty(0) motor2.duty(-duty1)if duty2>0:motor3.duty(duty2)motor4.duty(0)if duty2<0:motor3.duty(0) motor4.duty(-duty2) time.sleep(0.1)发出热点的ESP32C3
#导入Pin模块
from machine import Pin
import time
from machine import PWM
import network
import socket#定义LED控制对象
led1=Pin(6,Pin.OUT,Pin.PULL_DOWN)duty=0
speed=0
turn=0
angular=400
linear=400#WIFI连接
def wifi_connect():ap = network.WLAN(network.AP_IF) # 指定用ap模式ap.active(True) # 启用wifi前需要先激活接口ap.config(essid="ESP32_Motor_Control") # 设置热点名称ap.config(authmode=0) # 设置认证模式return True#网页数据
def web_page():global a1global a2global a3global a4html = """<html>
<head><meta name="viewport" content="width=device-width, initial-scale=1"><style>.button{display: inline-block; background-color: #8080f0; border: none; border-radius: 4px; color: white; padding: 8px 15px; text-decoration: none; font-size: 20px; margin: 2px; cursor: pointer;}a:link {text-decoration:none;}a:visited {text-decoration:none;}a:hover {text-decoration:none;}a:active {text-decoration:none;} html {font-family: Arial;display: inline-block;margin: 0px auto;text-align: center;}h2 { font-size: 1.5rem; }p { font-size: 1.5rem; }.units { font-size: 1rem; }.dht-labels{font-size: 1rem;vertical-align:middle;padding-bottom: 7px;}</style>
</head>
<body><h2>ESP32 Motor Control</h2> <p><a href="/?d1">linear: <strong>""" + str(speed) + """</strong></a></p><p><a href="/?w10"><button class="button">-3.00</button></a><a href="/?w11"><button class="button">-2.75</button></a><a href="/?w12"><button class="button">-2.50</button></a><a href="/?w13"><button class="button">-2.25</button></a><a href="/?w14"><button class="button">-2.00</button></a><a href="/?w15"><button class="button">-1.75</button></a><a href="/?w16"><button class="button">-1.50</button></a><a href="/?w17"><button class="button">-1.25</button></a><a href="/?w18"><button class="button">-1.00</button></a><a href="/?w19"><button class="button">-0.75</button></a><a href="/?w1a"><button class="button">-0.50</button></a><a href="/?w1b"><button class="button">-0.25</button></a><a href="/?w1c"><button class="button">0.00</button></a><a href="/?w1d"><button class="button">0.25</button></a><a href="/?w1e"><button class="button">0.50</button></a><a href="/?w1f"><button class="button">0.75</button></a><a href="/?w1g"><button class="button">1.00</button></a><a href="/?w1h"><button class="button">1.25</button></a><a href="/?w1i"><button class="button">1.50</button></a><a href="/?w1j"><button class="button">1.75</button></a><a href="/?w1k"><button class="button">2.00</button></a><a href="/?w1l"><button class="button">2.25</button></a><a href="/?w1m"><button class="button">2.50</button></a><a href="/?w1n"><button class="button">2.75</button></a><a href="/?w1o"><button class="button">3.00</button></a></p><p><a href="/?d2">angular: <strong>""" + str(turn) + """</strong></a></p><p><a href="/?w20"><button class="button">-3.00</button></a><a href="/?w21"><button class="button">-2.75</button></a><a href="/?w22"><button class="button">-2.50</button></a><a href="/?w23"><button class="button">-2.25</button></a><a href="/?w24"><button class="button">-2.00</button></a><a href="/?w25"><button class="button">-1.75</button></a><a href="/?w26"><button class="button">-1.50</button></a><a href="/?w27"><button class="button">-1.25</button></a><a href="/?w28"><button class="button">-1.00</button></a><a href="/?w29"><button class="button">-0.75</button></a><a href="/?w2a"><button class="button">-0.50</button></a><a href="/?w2b"><button class="button">-0.25</button></a><a href="/?w2c"><button class="button">0.00</button></a><a href="/?w2d"><button class="button">0.25</button></a><a href="/?w2e"><button class="button">0.50</button></a><a href="/?w2f"><button class="button">0.75</button></a><a href="/?w2g"><button class="button">1.00</button></a><a href="/?w2h"><button class="button">1.25</button></a><a href="/?w2i"><button class="button">1.50</button></a><a href="/?w2j"><button class="button">1.75</button></a><a href="/?w2k"><button class="button">2.00</button></a><a href="/?w2l"><button class="button">2.25</button></a><a href="/?w2m"><button class="button">2.50</button></a><a href="/?w2n"><button class="button">2.75</button></a><a href="/?w2o"><button class="button">3.00</button></a></p>
</body>
</html>"""return html#程序入口
if __name__=="__main__":wifi_connect()#SOCK_STREAM表示的是TCP协议,SOCK_DGRAM表示的是UDP协议my_socket=socket.socket(socket.AF_INET, socket.SOCK_STREAM) #创建socket连接# 将socket对象绑定ip地址和端口号my_socket.bind(('', 80))# 相当于电话的开机 括号里的参数表示可以同时接收5个请求my_socket.listen(5)while True:try: # 进入监听状态,等待别人链接过来,有两个返回值,#一个是对方的socket对象,一个是对方的ip以及端口client, addr = my_socket.accept()# recv表示接收,括号里是最大接收字节request = client.recv(1024)request = str(request)w10 = request.find('/?w10')w11 = request.find('/?w11')w12 = request.find('/?w12')w13 = request.find('/?w13')w14 = request.find('/?w14')w15 = request.find('/?w15')w16 = request.find('/?w16')w17 = request.find('/?w17')w18 = request.find('/?w18')w19 = request.find('/?w19')w1a = request.find('/?w1a')w1b = request.find('/?w1b')w1c = request.find('/?w1c')w1d = request.find('/?w1d')w1e = request.find('/?w1e')w1f = request.find('/?w1f')w1g = request.find('/?w1g')w1h = request.find('/?w1h')w1i = request.find('/?w1i')w1j = request.find('/?w1j')w1k = request.find('/?w1k')w1l = request.find('/?w1l')w1m = request.find('/?w1m')w1n = request.find('/?w1n')w1o = request.find('/?w1o')w20 = request.find('/?w20')w21 = request.find('/?w21')w22 = request.find('/?w22')w23 = request.find('/?w23')w24 = request.find('/?w24')w25 = request.find('/?w25')w26 = request.find('/?w26')w27 = request.find('/?w27')w28 = request.find('/?w28')w29 = request.find('/?w29')w2a = request.find('/?w2a')w2b = request.find('/?w2b')w2c = request.find('/?w2c')w2d = request.find('/?w2d')w2e = request.find('/?w2e')w2f = request.find('/?w2f')w2g = request.find('/?w2g')w2h = request.find('/?w2h')w2i = request.find('/?w2i')w2j = request.find('/?w2j')w2k = request.find('/?w2k')w2l = request.find('/?w2l')w2m = request.find('/?w2m')w2n = request.find('/?w2n')w2o = request.find('/?w2o')d1 = request.find('/?d1')d2 = request.find('/?d2')if d1 == 6:speed=0.00linear=400print(str(angular)+str(linear))if d2 == 6:turn=0.00angular=400print(str(angular)+str(linear)) if w10 == 6:speed=-3.00linear=100print(str(angular)+str(linear))if w11 == 6:speed=-2.75linear=125print(str(angular)+str(linear)) if w12 == 6:speed=-2.50linear=150print(str(angular)+str(linear))if w13 == 6:speed=-2.25linear=175print(str(angular)+str(linear))if w14 == 6:speed=-2.00linear=200print(str(angular)+str(linear))if w15 == 6:speed=-1.75linear=225print(str(angular)+str(linear)) if w16 == 6:speed=-1.50linear=250print(str(angular)+str(linear))if w17 == 6:speed=-1.25linear=275print(str(angular)+str(linear))if w18 == 6:speed=-1.00linear=300print(str(angular)+str(linear))if w19 == 6:speed=-0.75linear=325print(str(angular)+str(linear)) if w1a == 6:speed=-0.50linear=350print(str(angular)+str(linear))if w1b == 6:speed=-0.25linear=375print(str(angular)+str(linear))if w1c == 6:speed=0.00linear=400print(str(angular)+str(linear))if w1d == 6:speed=0.25linear=425print(str(angular)+str(linear)) if w1e == 6:speed=0.50linear=450print(str(angular)+str(linear))if w1f == 6:speed=0.75linear=475print(str(angular)+str(linear))if w1g == 6:speed=1.00linear=500print(str(angular)+str(linear))if w1h == 6:speed=1.25linear=525print(str(angular)+str(linear)) if w1i == 6:speed=1.50linear=550print(str(angular)+str(linear))if w1j == 6:speed=1.75linear=575print(str(angular)+str(linear))if w1k == 6:speed=2.00linear=600print(str(angular)+str(linear))if w1l == 6:speed=2.25linear=625print(str(angular)+str(linear)) if w1m == 6:speed=2.50linear=650print(str(angular)+str(linear))if w1n == 6:speed=2.75linear=675print(str(angular)+str(linear))if w1o == 6:speed=3.00linear=700print(str(angular)+str(linear))if w20 == 6:turn=-3.00angular=100print(str(angular)+str(linear))if w21 == 6:turn=-2.75angular=125print(str(angular)+str(linear)) if w22 == 6:turn=-2.50angular=150print(str(angular)+str(linear))if w23 == 6:turn=-2.25angular=175print(str(angular)+str(linear))if w24 == 6:turn=-2.00angular=200print(str(angular)+str(linear))if w25 == 6:turn=-1.75angular=225print(str(angular)+str(linear)) if w26 == 6:turn=-1.50angular=250print(str(angular)+str(linear))if w27 == 6:turn=-1.25angular=275print(str(angular)+str(linear))if w28 == 6:turn=-1.00angular=300print(str(angular)+str(linear))if w29 == 6:turn=-0.75angular=325print(str(angular)+str(linear)) if w2a == 6:turn=-0.50angular=350print(str(angular)+str(linear))if w2b == 6:turn=-0.25angular=375print(str(angular)+str(linear))if w2c == 6:turn=0.00angular=400print(str(angular)+str(linear))if w2d == 6:turn=0.25angular=425print(str(angular)+str(linear)) if w2e == 6:turn=0.50angular=450print(str(angular)+str(linear))if w2f == 6:turn=0.75angular=475print(str(angular)+str(linear))if w2g == 6:turn=1.00angular=500print(str(angular)+str(linear))if w2h == 6:turn=1.25angular=525print(str(angular)+str(linear)) if w2i == 6:turn=1.50angular=550print(str(angular)+str(linear))if w2j == 6:turn=1.75angular=575print(str(angular)+str(linear))if w2k == 6:turn=2.00angular=600print(str(angular)+str(linear))if w2l == 6:turn=2.25angular=625print(str(angular)+str(linear)) if w2m == 6:turn=2.50angular=650print(str(angular)+str(linear))if w2n == 6:turn=2.75angular=675print(str(angular)+str(linear))if w2o == 6:turn=3.00angular=700print(str(angular)+str(linear)) response = web_page()client.send('HTTP/1.1 200 OK\n')client.send('Content-Type: text/html\n')client.send('Connection: close\n\n')client.sendall(response)client.close()except:pass控制机械臂的ESP32C3
#导入Pin模块
from machine import Pin
import time
from machine import SoftI2C
from servo import Servos
import network
import socket#定义LED控制对象
led1=Pin(4,Pin.OUT,Pin.PULL_DOWN)
i2c=SoftI2C(sda=Pin(9),scl=Pin(8),freq=10000)
servos=Servos(i2c,address=0x40)#连接的WIFI账号和密码
ssid = "ESP32_Motor_Control"
password=None
#舵机默认角度
servos.position(0,90)
servos.position(1,90)
servos.position(2,90)
servos.position(3,90)
servos.position(4,90)#WIFI连接
def wifi_connect():wlan=network.WLAN(network.STA_IF) #STA模式wlan.active(True) #激活if not wlan.isconnected():print("conneting to network...")wlan.connect(ssid,password) #输入 WIFI 账号密码while not wlan.isconnected():led1.value(1)time.sleep_ms(300)led1.value(0)time.sleep_ms(300)led1.value(0)return Falseelse:led1.value(0)print("network information:", wlan.ifconfig())return Truea0=90
a1=90
a2=90
a3=90
a4=90
#网页数据
def web_page():global a0global a1global a2global a3global a4html = """<html>
<head><meta name="viewport" content="width=device-width, initial-scale=1"><style>.button{display: inline-block; background-color: #971080; border: none; border-radius: 4px; color: white; padding: 8px 15px; text-decoration: none; font-size: 20px; margin: 2px; cursor: pointer;}a:link {text-decoration:none;}a:visited {text-decoration:none;}a:hover {text-decoration:none;}a:active {text-decoration:none;} html {font-family: Arial;display: inline-block;margin: 0px auto;text-align: center;}h2 { font-size: 1.5rem; }p { font-size: 1.5rem; }.units { font-size: 1rem; }.dht-labels{font-size: 1rem;vertical-align:middle;padding-bottom: 7px;}</style>
</head>
<body><h2>ESP32 Servo Control</h2><p><a href="/?d0">Servo0: <strong>""" + str(a0) + """</strong></a></p><p><a href="/?b00"><button class="button">0</button></a><a href="/?b01"><button class="button">10</button></a><a href="/?b02"><button class="button">20</button></a><a href="/?b03"><button class="button">30</button></a><a href="/?b04"><button class="button">40</button></a><a href="/?b05"><button class="button">50</button></a><a href="/?b06"><button class="button">60</button></a><a href="/?b07"><button class="button">70</button></a><a href="/?b08"><button class="button">80</button></a><a href="/?b09"><button class="button">90</button></a><a href="/?b0a"><button class="button">100</button></a><a href="/?b0b"><button class="button">110</button></a><a href="/?b0c"><button class="button">120</button></a><a href="/?b0d"><button class="button">130</button></a><a href="/?b0e"><button class="button">140</button></a><a href="/?b0f"><button class="button">150</button></a><a href="/?b0g"><button class="button">160</button></a><a href="/?b0h"><button class="button">170</button></a><a href="/?b0i"><button class="button">180</button></a></p><p><a href="/?d1">Servo1: <strong>""" + str(a1) + """</strong></a></p><p><a href="/?b10"><button class="button">0</button></a><a href="/?b11"><button class="button">10</button></a><a href="/?b12"><button class="button">20</button></a><a href="/?b13"><button class="button">30</button></a><a href="/?b14"><button class="button">40</button></a><a href="/?b15"><button class="button">50</button></a><a href="/?b16"><button class="button">60</button></a><a href="/?b17"><button class="button">70</button></a><a href="/?b18"><button class="button">80</button></a><a href="/?b19"><button class="button">90</button></a><a href="/?b1a"><button class="button">100</button></a><a href="/?b1b"><button class="button">110</button></a><a href="/?b1c"><button class="button">120</button></a><a href="/?b1d"><button class="button">130</button></a><a href="/?b1e"><button class="button">140</button></a><a href="/?b1f"><button class="button">150</button></a><a href="/?b1g"><button class="button">160</button></a><a href="/?b1h"><button class="button">170</button></a><a href="/?b1i"><button class="button">180</button></a></p><p><a href="/?d2">Servo2: <strong>""" + str(a2) + """</strong></a></p><p><a href="/?b10"><button class="button">0</button></a><a href="/?b21"><button class="button">10</button></a><a href="/?b22"><button class="button">20</button></a><a href="/?b23"><button class="button">30</button></a><a href="/?b24"><button class="button">40</button></a><a href="/?b25"><button class="button">50</button></a><a href="/?b26"><button class="button">60</button></a><a href="/?b27"><button class="button">70</button></a><a href="/?b28"><button class="button">80</button></a><a href="/?b29"><button class="button">90</button></a><a href="/?b2a"><button class="button">100</button></a><a href="/?b2b"><button class="button">110</button></a><a href="/?b2c"><button class="button">120</button></a><a href="/?b2d"><button class="button">130</button></a><a href="/?b2e"><button class="button">140</button></a><a href="/?b2f"><button class="button">150</button></a><a href="/?b2g"><button class="button">160</button></a><a href="/?b2h"><button class="button">170</button></a><a href="/?b2i"><button class="button">180</button></a></p><p><a href="/?d3">Servo3: <strong>""" + str(a3) + """</strong></a></p><p><a href="/?b30"><button class="button">0</button></a><a href="/?b31"><button class="button">10</button></a><a href="/?b32"><button class="button">20</button></a><a href="/?b33"><button class="button">30</button></a><a href="/?b34"><button class="button">40</button></a><a href="/?b35"><button class="button">50</button></a><a href="/?b36"><button class="button">60</button></a><a href="/?b37"><button class="button">70</button></a><a href="/?b38"><button class="button">80</button></a><a href="/?b39"><button class="button">90</button></a><a href="/?b3a"><button class="button">100</button></a><a href="/?b3b"><button class="button">110</button></a><a href="/?b3c"><button class="button">120</button></a><a href="/?b3d"><button class="button">130</button></a><a href="/?b3e"><button class="button">140</button></a><a href="/?b3f"><button class="button">150</button></a><a href="/?b3g"><button class="button">160</button></a><a href="/?b3h"><button class="button">170</button></a><a href="/?b3i"><button class="button">180</button></a></p><p><a href="/?d4">Servo4: <strong>""" + str(a4) + """</strong></a></p><p><a href="/?b30"><button class="button">0</button></a><a href="/?b41"><button class="button">10</button></a><a href="/?b42"><button class="button">20</button></a><a href="/?b43"><button class="button">30</button></a><a href="/?b44"><button class="button">40</button></a><a href="/?b45"><button class="button">50</button></a><a href="/?b46"><button class="button">60</button></a><a href="/?b47"><button class="button">70</button></a><a href="/?b48"><button class="button">80</button></a><a href="/?b49"><button class="button">90</button></a><a href="/?b4a"><button class="button">100</button></a><a href="/?b4b"><button class="button">110</button></a><a href="/?b4c"><button class="button">120</button></a><a href="/?b4d"><button class="button">130</button></a><a href="/?b4e"><button class="button">140</button></a><a href="/?b4f"><button class="button">150</button></a><a href="/?b4g"><button class="button">160</button></a><a href="/?b4h"><button class="button">170</button></a><a href="/?b4i"><button class="button">180</button></a></p>
</body>
</html>"""return html#程序入口
if __name__=="__main__":wifi_connect()#SOCK_STREAM表示的是TCP协议,SOCK_DGRAM表示的是UDP协议my_socket=socket.socket(socket.AF_INET, socket.SOCK_STREAM) #创建socket连接# 将socket对象绑定ip地址和端口号my_socket.bind(('', 80))# 相当于电话的开机 括号里的参数表示可以同时接收5个请求my_socket.listen(5)while True:try: # 进入监听状态,等待别人链接过来,有两个返回值,#一个是对方的socket对象,一个是对方的ip以及端口client, addr = my_socket.accept()print('Got a connection from %s' % str(addr))# recv表示接收,括号里是最大接收字节request = client.recv(1024)request = str(request)print('Content = %s' % request)b00 = request.find('/?b00')b01 = request.find('/?b01')b02 = request.find('/?b02')b03 = request.find('/?b03')b04 = request.find('/?b04')b05 = request.find('/?b05')b06 = request.find('/?b06')b07 = request.find('/?b07')b08 = request.find('/?b08')b09 = request.find('/?b09')b0a = request.find('/?b0a')b0b = request.find('/?b0b')b0c = request.find('/?b0c')b0d = request.find('/?b0d')b0e = request.find('/?b0e')b0f = request.find('/?b0f')b0g = request.find('/?b0g')b0h = request.find('/?b0h')b0i = request.find('/?b0i')b10 = request.find('/?b10')b11 = request.find('/?b11')b12 = request.find('/?b12')b13 = request.find('/?b13')b14 = request.find('/?b14')b15 = request.find('/?b15')b16 = request.find('/?b16')b17 = request.find('/?b17')b18 = request.find('/?b18')b19 = request.find('/?b19')b1a = request.find('/?b1a')b1b = request.find('/?b1b')b1c = request.find('/?b1c')b1d = request.find('/?b1d')b1e = request.find('/?b1e')b1f = request.find('/?b1f')b1g = request.find('/?b1g')b1h = request.find('/?b1h')b1i = request.find('/?b1i')b20 = request.find('/?b10')b21 = request.find('/?b21')b22 = request.find('/?b22')b23 = request.find('/?b23')b24 = request.find('/?b24')b25 = request.find('/?b25')b26 = request.find('/?b26')b27 = request.find('/?b27')b28 = request.find('/?b28')b29 = request.find('/?b29')b2a = request.find('/?b2a')b2b = request.find('/?b2b')b2c = request.find('/?b2c')b2d = request.find('/?b2d')b2e = request.find('/?b2e')b2f = request.find('/?b2f')b2g = request.find('/?b2g')b2h = request.find('/?b2h')b2i = request.find('/?b2i')b30 = request.find('/?b30')b31 = request.find('/?b31')b32 = request.find('/?b32')b33 = request.find('/?b33')b34 = request.find('/?b34')b35 = request.find('/?b35')b36 = request.find('/?b36')b37 = request.find('/?b37')b38 = request.find('/?b38')b39 = request.find('/?b39')b3a = request.find('/?b3a')b3b = request.find('/?b3b')b3c = request.find('/?b3c')b3d = request.find('/?b3d')b3e = request.find('/?b3e')b3f = request.find('/?b3f')b3g = request.find('/?b3g')b3h = request.find('/?b3h')b3i = request.find('/?b3i')b40 = request.find('/?b40')b41 = request.find('/?b41')b42 = request.find('/?b42')b43 = request.find('/?b43')b44 = request.find('/?b44')b45 = request.find('/?b45')b46 = request.find('/?b46')b47 = request.find('/?b47')b48 = request.find('/?b48')b49 = request.find('/?b49')b4a = request.find('/?b4a')b4b = request.find('/?b4b')b4c = request.find('/?b4c')b4d = request.find('/?b4d')b4e = request.find('/?b4e')b4f = request.find('/?b4f')b4g = request.find('/?b4g')b4h = request.find('/?b4h')b4i = request.find('/?b4i')if b00 == 6:servos.position(0,0)a0=0if b11 == 6:servos.position(0,10)a0=10if b02 == 6:servos.position(0,20)a0=20if b03 == 6:servos.position(0,30)a0=30if b04 == 6:servos.position(0,40)a0=40if b05 == 6:servos.position(0,50)a0=50if b06 == 6:servos.position(0,60)a0=60if b07 == 6:servos.position(0,70)a0=70if b08 == 6:servos.position(0,80)a0=80if b09 == 6:servos.position(0,90)a0=90if b0a == 6:servos.position(0,100)a0=100if b0b == 6:servos.position(0,110)a0=110if b0c == 6:servos.position(0,120)a0=120if b0d == 6:servos.position(0,130)a0=130if b0e == 6:servos.position(0,140)a0=140if b0f == 6:servos.position(0,150)a0=150if b0g == 6:servos.position(0,160)a0=160if b0h == 6:servos.position(0,170)a0=170if b0i == 6:servos.position(0,180)a0=180if b10 == 6:servos.position(1,0)a1=0if b11 == 6:servos.position(1,10)a1=10if b12 == 6:servos.position(1,20)a1=20if b13 == 6:servos.position(1,30)a1=30if b14 == 6:servos.position(1,40)a1=40if b15 == 6:servos.position(1,50)a1=50if b16 == 6:servos.position(1,60)a1=60if b17 == 6:servos.position(1,70)a1=70if b18 == 6:servos.position(1,80)a1=80if b19 == 6:servos.position(1,90)a1=90if b1a == 6:servos.position(1,100)a1=100if b1b == 6:servos.position(1,110)a1=110if b1c == 6:servos.position(1,120)a1=120if b1d == 6:servos.position(1,130)a1=130if b1e == 6:servos.position(1,140)a1=140if b1f == 6:servos.position(1,150)a1=150if b1g == 6:servos.position(1,160)a1=160if b1h == 6:servos.position(1,170)a1=170if b1i == 6:servos.position(1,180)a1=180if b20 == 6:servos.position(2,0)a2=0if b21 == 6:servos.position(2,10)a2=10if b22 == 6:servos.position(2,20)a2=20if b23 == 6:servos.position(2,30)a2=30if b24 == 6:servos.position(2,40)a2=40if b25 == 6:servos.position(2,50)a2=50if b26 == 6:servos.position(2,60)a2=60if b27 == 6:servos.position(2,70)a2=70if b28 == 6:servos.position(2,80)a2=80if b29 == 6:servos.position(2,90)a2=90if b2a == 6:servos.position(2,100)a2=100if b2b == 6:servos.position(2,110)a2=110if b2c == 6:servos.position(2,120)a2=120if b2d == 6:servos.position(2,130)a2=130if b2e == 6:servos.position(2,140)a2=140if b2f == 6:servos.position(2,150)a2=150if b2g == 6:servos.position(2,160)a2=160if b2h == 6:servos.position(2,170)a2=170if b2i == 6:servos.position(2,180)a2=180if b30 == 6:servos.position(3,0)a3=0if b31 == 6:servos.position(3,10)a3=10if b32 == 6:servos.position(3,20)a3=20if b33 == 6:servos.position(3,30)a3=30if b34 == 6:servos.position(3,40)a3=40if b35 == 6:servos.position(3,50)a3=50if b36 == 6:servos.position(3,60)a3=60if b37 == 6:servos.position(3,70)a3=70if b38 == 6:servos.position(3,80)a3=80if b39 == 6:servos.position(3,90)a3=90if b3a == 6:servos.position(3,100)a3=100if b3b == 6:servos.position(3,110)a3=110if b3c == 6:servos.position(3,120)a3=120if b3d == 6:servos.position(3,130)a3=130if b3e == 6:servos.position(3,140)a3=140if b3f == 6:servos.position(3,150)a3=150if b3g == 6:servos.position(3,160)a3=160if b3h == 6:servos.position(3,170)a3=170if b3i == 6:servos.position(3,180)a3=180if b40 == 6:servos.position(4,0)a4=0if b41 == 6:servos.position(4,10)a4=10if b42 == 6:servos.position(4,20)a4=20if b43 == 6:servos.position(4,30)a4=30if b44 == 6:servos.position(4,40)a4=40if b45 == 6:servos.position(4,50)a4=50if b46 == 6:servos.position(4,60)a4=60if b47 == 6:servos.position(4,70)a4=70if b48 == 6:servos.position(4,80)a4=80if b49 == 6:servos.position(4,90)a4=90if b4a == 6:servos.position(4,100)a4=100if b4b == 6:servos.position(4,110)a4=110if b4c == 6:servos.position(4,120)a4=120if b4d == 6:servos.position(4,130)a4=130if b4e == 6:servos.position(4,140)a4=140if b4f == 6:servos.position(4,150)a4=150if b4g == 6:servos.position(4,160)a4=160if b4h == 6:servos.position(4,170)a4=170if b4i == 6:servos.position(4,180)a4=180 response = web_page()client.send('HTTP/1.1 200 OK\n')client.send('Content-Type: text/html\n')client.send('Connection: close\n\n')client.sendall(response)client.close()except:pass相关文章:
ESP32(MicroPython) 两轮差速五自由度机械臂小车
这次的项目在软件上没多少调整,但本人希望分享一下硬件上的经验。 小车使用两轮差速底盘,驱动轮在小车中间,前后都要万向轮。这种形式可以实现0转弯半径,但受万向轮及用于加高的铜柱的规格限制,两个万向轮难以调到相同…...
)
mysql基本函数(五)
目录 一、数字函数二、字符函数三、日期时间函数3.1 获取系统日期时间的函数3.2 日期格式化函数3.3 日期偏移计算3.4 日期之间相隔的天数 四、条件函数4.1 IF语句4.2 条件语句 一、数字函数 函数功能用例ABS绝对值ABS(-100)ROUND四舍五入ROUND(4.62)FLOOR向下取值FLOOR(9.9)CE…...
liteflow 2.10 配置中心简单记录
除nacos是一个key 同时管理chain和script node外,可以理解为配置文件整体放到一个key下nacos下的文件必须是xml格式,系统只实现了xml parser其它etcd,zk,Apollo 是两个namespace/path(chain及script node各一)下多个key,每个key对应一个chain/node所有配置中心的核心代码…...

【C++】引用、内联函数等
文章目录 一、引用1.引用概念2.引用特性3.引用时的权限问题4 .使用场景5 .引用和指针的联系与区别 二、内联函数1.概念2.注意点 三、auto关键字1.概念2.auto的使用细则 四、 基于范围的for循环1.概念2.范围for的使用条件 五、 指针空值nullptr1.概念2.使用注意 一、引用 1.引用…...
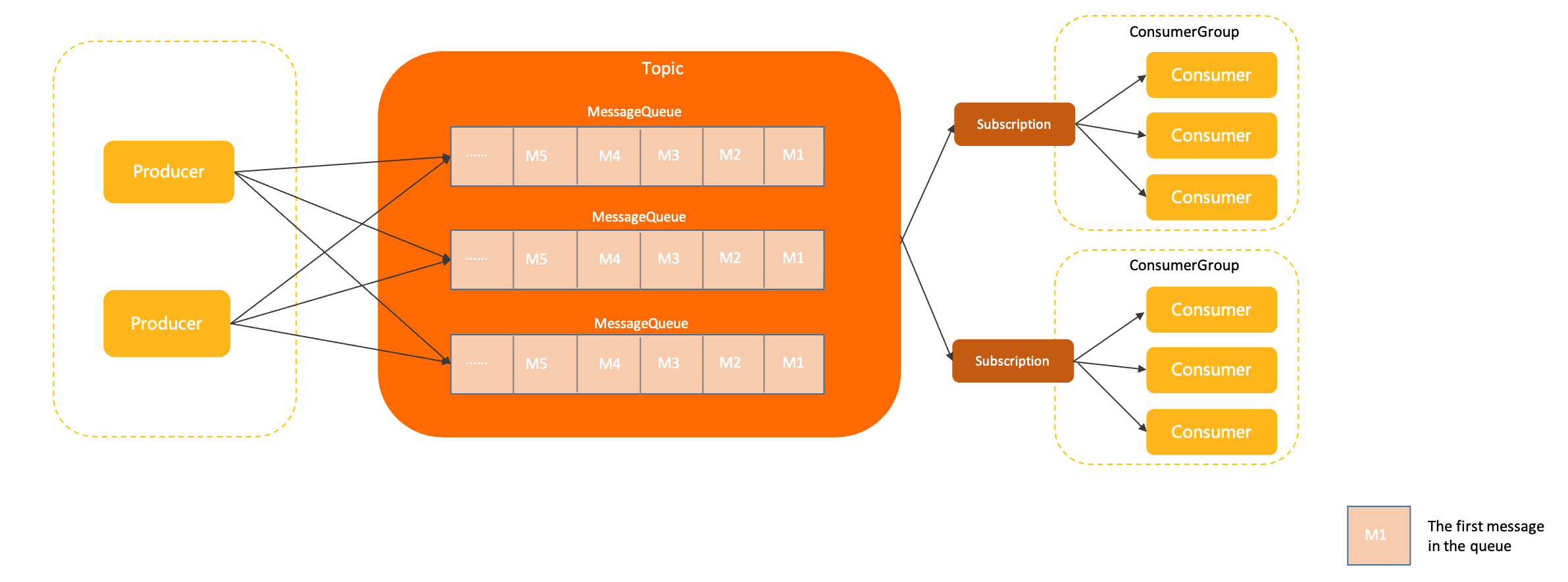
RocketMQ教程-(4)-主题(Topic)
本文介绍 Apache RocketMQ 中主题(Topic)的定义、模型关系、内部属性、行为约束、版本兼容性及使用建议。 定义 主题是 Apache RocketMQ 中消息传输和存储的顶层容器,用于标识同一类业务逻辑的消息。 主题的作用主要如下: 定义…...

睡眠健康数据分析
项目背景 背景描述 本数据集涵盖了与睡眠和日常习惯有关的诸多变量。如性别、年龄、职业、睡眠时间、睡眠质量、身体活动水平、压力水平、BMI类别、血压、心率、每日步数、以及是否有睡眠障碍等细节。 数据集的主要特征: 综合睡眠指标: 探索睡眠持续时…...

Spring Boot 3.x 系列【47】启动流程 | 启动监听器
有道无术,术尚可求,有术无道,止于术。 本系列Spring Boot版本3.1.0 源码地址:https://gitee.com/pearl-organization/study-spring-boot3 文章目录 1. 前言2. 核心类2.1 SpringApplicationRunListener2.2 ApplicationStartup2.3 ApplicationListener3. 执行流程3.1 获取监…...

【KD】知识蒸馏与迁移学习的不同
知识蒸馏与迁移学习的不同 (1)数据域不同. 知识蒸馏中的知识通常是在同一个目标数据集上进行迁移,而迁移学习中的知识往往是在不同目标的数据集上进行转移. (2)网络结构不同. 知识蒸馏的两个网络可以是同构或者异构的,而迁移学习通常是在单个网络上利用其…...

计算机内存中的缓存Cache Memories
这篇写一下计算机系统中的缓存Cache应用场景和实现方式介绍。 Memory hierarchy 在讲缓存之前,首先要了解计算机中的内存结构层次Memory hierarchy。也就是下图金字塔形状的结构。 从上到下,内存层次结构如下: 寄存器:这是计算机…...
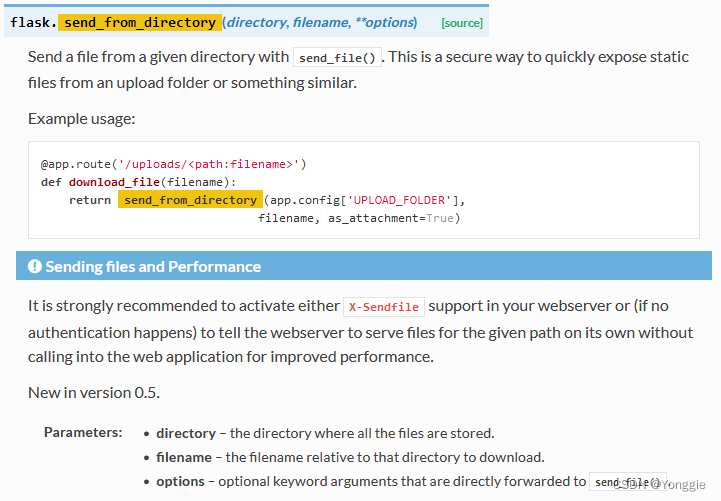
Flask的send file和send_from_directory的区别
可以自行查看flask 文档。 send file高效; send from directory安全,且适用于静态资源交互。 都是实现相同的功能的。 send_file send_from_directory...
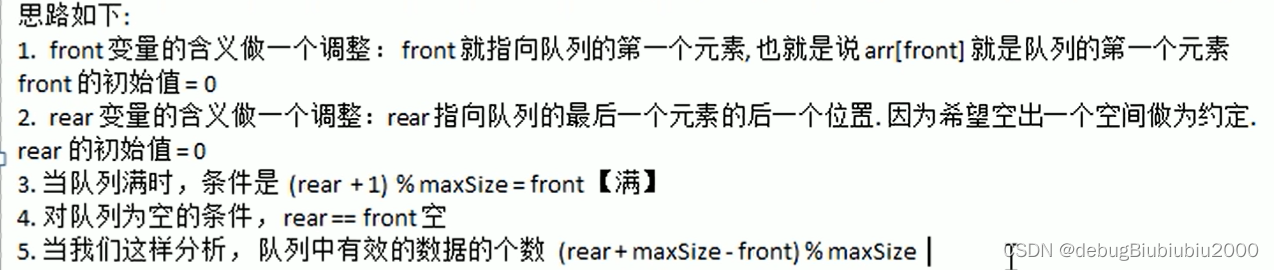
Java 队列
基本介绍 数组模拟队列 思路分析 代码实现 import java.util.Scanner;public class Test {public static void main(String[] args) {// 创建一个队列ArrayQueue queue new ArrayQueue(3);int select;Scanner scanner new Scanner(System.in);boolean loop true;while (lo…...
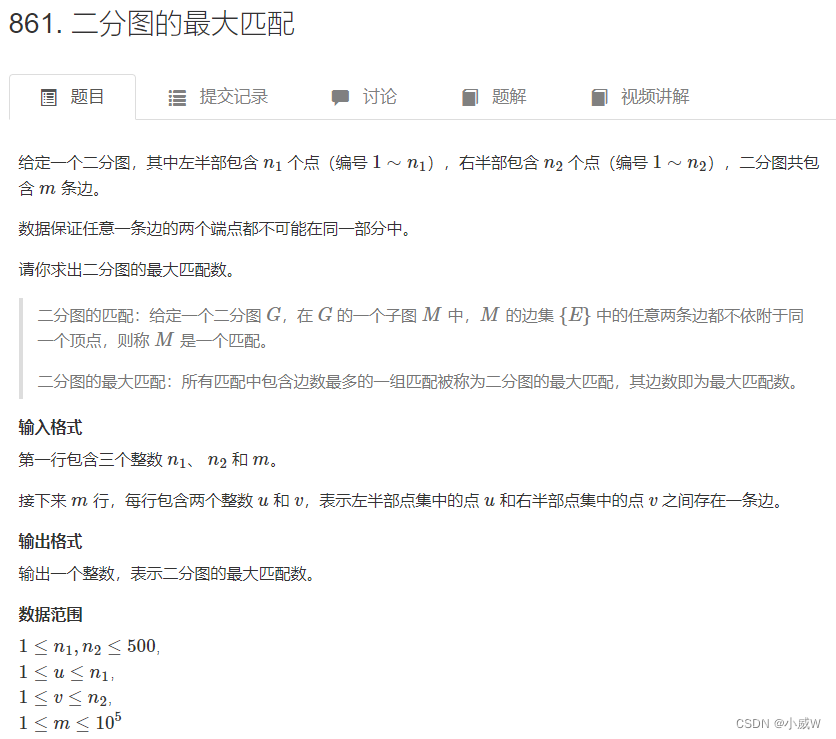
【算法基础:搜索与图论】3.6 二分图(染色法判定二分图匈牙利算法)
文章目录 二分图介绍染色法判定二分图例题:860. 染色法判定二分图 匈牙利匹配二分图最大匹配匈牙利匹配算法思想例题:861. 二分图的最大匹配 二分图介绍 https://oi-wiki.org/graph/bi-graph/ 二分图是图论中的一个概念,它的所有节点可以被…...

SpringMVC 怎么和 AJAX 相互调用的
通过 Jackson 框架就可以把 Java 里面的对象直接转化成 Js 可以识别的 Json 对象。 步骤如下 : a、加入 Jackson.jar b、在配置文件中配置 json 的映射 c、在接受 Ajax 方法里面可以直接返回 Object,List 等,但方法前面要加上ResponseBody 详细步骤: …...

UCDOS和WPS推动计算机领域的汉字化发展,中文编程该谁力扛大旗?
你还记得UCDOS吗? 从DOS时代过来的人,还知道UCDOS的,现在可能已经是中年人了! 当时,鲍岳桥的UCDOS可以称得上是中国的国产操作系统。 在Windows还没来得及进入中国市场时,UCDOS可以说是走向了巅峰时刻&a…...

golang+layui提升界面美化度--[推荐]
一、背景 golanglayui提升界面美化度--[推荐]; golang后端写的页面很难看,如何好看点呢,那就是layui https://layui.dev/ 也是一个简单上手容易使用的框架,类似jquery,对于后端开发来说满足使用需求 二、使用注意点…...

42. 接雨水
题目介绍 给定 n 个非负整数表示每个宽度为 1 的柱子的高度图,计算按此排列的柱子,下雨之后能接多少雨水。 示例 1: 输入:height [0,1,0,2,1,0,1,3,2,1,2,1] 输出:6 解释:上面是由数组 [0,1,0,2,1,0,1,3…...

Python学习阶段路线和内容
Python学习阶段路线和内容 这是我的看法和认识,供参考。 Python学习路线主要分为三个阶段:入门阶段、提高阶段和深入阶段。 入门阶段 入门阶段需要学习Python的基本语法,掌握变量和数据类型、条件语句和循环语句、函数和模块等内容。并通过…...
RocketMQ教程-安装和配置
Linux系统安装配置 64位操作系统,推荐 Linux/Unix/macOS 64位 JDK 1.8 Maven3.0 yum 安装jdk8 yum 安装maven 1.下载安装Apache RocketMQ RocketMQ 的安装包分为两种,二进制包和源码包。 点击这里 下载 Apache RocketMQ 5.1.3的源码包。你也可以从这…...

【LeetCode】55.跳跃游戏
题目 给定一个非负整数数组 nums ,你最初位于数组的 第一个下标 。 数组中的每个元素代表你在该位置可以跳跃的最大长度。 判断你是否能够到达最后一个下标。 示例 1: 输入:nums [2,3,1,1,4] 输出:true 解释:可以…...

Docker学习路线12:开发者体验
到目前为止,我们只讨论了使用Docker来部署应用程序。然而,Docker也是一个极好的用于开发应用程序的工具。可以采用一些不同的建议来改善开发体验。 在应用程序中使用docker-compose以方便开发。使用绑定挂载将本地代码挂载到容器文件系统中,…...

科技金融数智底座技术架构及优秀厂商
好的,科技金融数智底座的技术架构通常包含以下核心层级,并推荐相关厂商(含火石创造):一、科技金融数智底座技术架构1. 数据层功能:集成多源异构数据(如交易数据、用户行为、产业经济数据等&…...

cwalk:嵌入式C/C++轻量级路径处理库实战指南
1. cwalk:嵌入式系统中轻量级跨平台路径处理库的工程实践解析在嵌入式固件开发中,路径操作看似与裸机环境无关,实则在多个关键场景中不可或缺:Bootloader中从FAT32/SD卡加载固件镜像时需解析/firmware/v2.3.1/app.bin;…...
中国数学家王虹再获殊荣)
数学周刊第14期(2026年03月30日-04月06日)中国数学家王虹再获殊荣
目录王虹获纽约大学最高荣誉,距菲尔兹奖仅一步之遥香港科大团队首创代码驱动系统参考资料王虹获纽约大学最高荣誉,距菲尔兹奖仅一步之遥 当地时间4月2日,美国纽约大学柯朗数学科学研究所宣布,中国数学家王虹获评该校“银教授”&am…...

揭秘蒸发冷省电空调,成车间降温设备优选
在工业生产中,大车间的降温一直是个重要问题。传统空调在大车间使用时,往往面临着能耗高、制冷效果不佳等难题。而蒸发冷省电空调的出现,为大车间降温带来了新的解决方案,逐渐成为车间降温设备的优选。蒸发冷省电空调在制冷原理上…...

Figma
Figma 是一款基于浏览器的界面设计工具,现在已经成为UI/UX设计领域的事实标准。核心定位维度说明本质云端协作式界面设计工具主战场UI设计、UX原型、设计系统管理最大差异化实时多人协作(像Google Docs一样多人同时编辑) 关键特性 1. 实时协作…...

利用快马AI平台,十分钟快速搭建SpringCloud微服务原型
利用快马AI平台,十分钟快速搭建SpringCloud微服务原型 最近在尝试搭建一个SpringCloud微服务项目原型,发现传统方式需要手动配置各种组件,耗时又容易出错。后来发现了InsCode(快马)平台,它通过AI智能生成能力,能快速搭…...

Spyglass实战指南:从约束到违例豁免的CDC/RDC检查全流程
1. Spyglass入门:CDC/RDC检查基础 第一次接触Spyglass时,我被它复杂的规则体系搞得晕头转向。直到在项目中真正用它解决了几个棘手的跨时钟域问题,才明白这个工具的价值。简单来说,Spyglass就像个经验丰富的"电路医生"&…...
)
用什么来搭建知识库(写给小白的LLM工具选型系列:第六篇)
诸神缄默不语-个人技术博文与视频目录 (本文为AI生成,未做人工验证,也未列出参考资料。以后可能会更新) 本文面向小白读者,介绍基于AI的大规模知识库(RAG)的基本原理和常见方案。我们首先用通…...
告别Transformer的O(n²)烦恼:手把手带你用Mamba搭建一个长文本摘要Demo
突破长文本处理瓶颈:基于Mamba的高效摘要系统实战指南 当面对动辄数万字的学术论文、企业年报或用户反馈文档时,传统Transformer模型的内存消耗会随着文本长度呈平方级增长。我曾在一个金融数据分析项目中亲历过这种困境——当输入文档超过5000字时&…...

终极指南:vgpu_unlock如何突破消费级GPU虚拟化限制?未来支持路线全解析
终极指南:vgpu_unlock如何突破消费级GPU虚拟化限制?未来支持路线全解析 【免费下载链接】vgpu_unlock Unlock vGPU functionality for consumer grade GPUs. 项目地址: https://gitcode.com/gh_mirrors/vg/vgpu_unlock vgpu_unlock是一款革命性工…...