【文献分享】比目前最先进的模型轻30%!高效多机器人SLAM蒸馏描述符!

论文题目:Descriptor Distillation for Efficient Multi-Robot SLAM
中文题目:高效多机器人SLAM蒸馏描述符
作者:Xiyue Guo, Junjie Hu, Hujun Bao and Guofeng Zhang
作者机构:浙江大学CAD&CG国家重点实验室 香港中文大学(深圳)
论文链接:https://arxiv.org/pdf/2303.08420.pdf
本文通过生成具有最小推理时间的紧凑且具有判别性的特征描述符来解决多机器人探索过程中保持低水平通信带宽的同时进行精确定位的问题;文中将描述符生成转化为老师-学生框架下的学习问题。首先设计一个紧凑的学生网络,通过从预训练的大型教师模型中转移知识来学习它。为了减少从教师到学生的描述符维度,文中提出了一种新的损失函数,使知识在两个不同维度的描述符之间转移。
1 前言
多机器人SLAM系统(MR-SLAM系统)相比单机器人系统最主要的限制是:通信带宽的限制。在MR-SLAM系统中,为了整合整个团队的所有轨迹,团队中的每个机器人都需要共享其关键帧数据(包括关键帧姿态和观察到的特征点),以处理机器人间的闭环和全局定位。这种类型的数据交换占用了很高的通信容量,很可能降低实时性能。
一些工程上的解决方案比如降低频率、减少关键点数量可以降低通信带宽,但会导致定位精度降低;提高精度则会导致带宽升高;如果降低描述符维度会导致匹配性能变差。
卷积神经网络(CNN)方法已经显示出对手工描述符的优越性能,但基于CNN的方法多适用于单机器人系统(SR-SLAM),高模型复杂性和描述符维度是阻碍基于学习的方法在MR-SLAM中应用的两个主要障碍。
本文提出了一个基于知识蒸馏(KD)的描述符学习框架。该框架是一个经典的师生组合,其中学生是我们要学习的紧凑模型,而教师是一个预训练的更大的网络,其预测用于监督学生的学习。为了解决老师和学生之间输出维度的不同,本文还设计了一种新的损失函数。
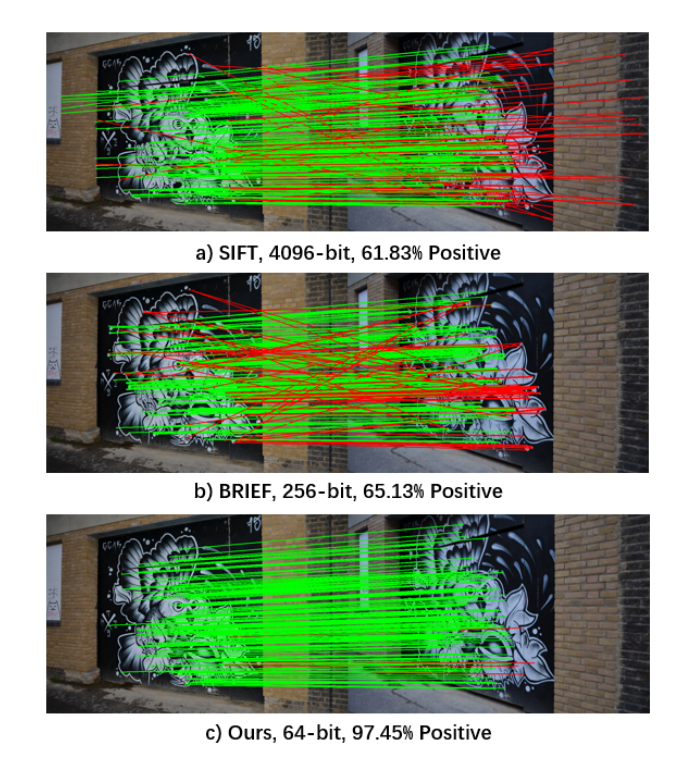
本文模型与传统模型的比较如下图所示:
本文主要贡献如下:
- 设计了一个师生模型来生成紧凑的二进制描述符。
- 提出了一种新的基于距离的蒸馏损失,它允许具有不同输出维度的模型之间的知识转移。
- 开发了一个基于新描述符模型的MR-SLAM系统作为评估平台。
2 算法框架
2.1 基于学习的描述符生成
本文类似于主流的CNN方法,通过Siamese框架结构学习描述符。它是一个双胞胎模型,在训练过程中共享相同的权重。在Siamese框架下,每个训练阶段都准备两批。批次中的每个图像块对另一个都是负的,同一时代的两个批是一一对应的。
它有两个主要的损耗用于训练:
- Triplet loss:它强制匹配的对尽可能接近,而不匹配的对尽可能远。最近的方法大多遵循HardNet策略,只提取包含最小距离的负对进行训练:
L T = ∑ i N m a x ( 0 , t + d i s ( R i , R p ) − d i s ( R i , R n ∗ ) ) L_{T}=\sum_i^N max(0,t+dis(R_{i},R_{p})-dis(R_{i},R_{n}^{*})) LT=i∑Nmax(0,t+dis(Ri,Rp)−dis(Ri,Rn∗))
R i R_i Ri为当前实值描述子, R p R_p Rp为对应的正描述子, R n ∗ R_{n}^{*} Rn∗为最接近的负描述子,n为批大小。dis计算两个描述符之间的L2距离。
- Binarization loss:它旨在最小化实值描述符与对应的二进制描述符之间的差异:
L B = ∑ i N ∑ k D 1 D ( R i ( k ) − B i ( k ) ) 2 L_{B}=\sum_i^N \sum_k^D \frac{1}{D}\sqrt{(R_{i}(k)-B_{i}(k))^2} LB=i∑Nk∑DD1(Ri(k)−Bi(k))2
B(k)为二进制描述子B的第k个值,R(k)为实值描述子R的第k个值,D为描述子的维数。
2.2 老师-学生蒸馏框架
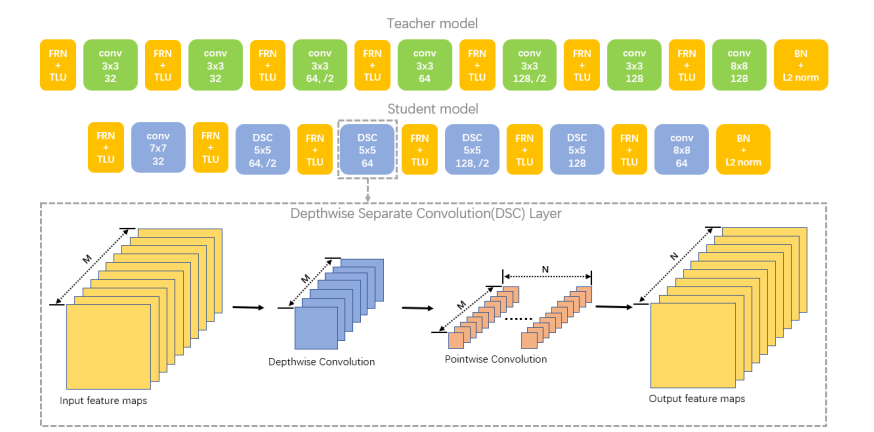
如上图所示,所有的老师卷积层之后是滤波响应归一化(FRN)和阈值线性单元(TLU)。批处理归一化(BN)和l2归一化放在最后的卷积层之后。
学生卷积层第一部分是深度卷积,它对每个输入通道应用一个卷积滤波器。第二部分是1×1卷积,称为逐点卷积。
基于该体系结构,每个模型都能够将图像补丁嵌入到实值描述符中。为了得到二进制描述符,使用以下方程对实值描述符进行二值化:
B ( k ) = { − 1 , i f R ( k ) ≤ 0 1 , i f R ( k ) ≥ 0 B\left(k \right) =\left\{ \begin{array}{l} -1,\ \ \ \ if\ R(k)≤0\\ 1, \ \ \ \ \ \ \ if\ R(k)≥0\\ \end{array} \right. B(k)={−1, if R(k)≤01, if R(k)≥0
2.3 蒸馏损失函数
它由一个实值项和一个二元值项组成,它们分别强制学生模型的描述符批在实值和二元空间上具有与教师模型相似的分布。
实值项负描述符损失项:
L r e a l = ∑ i N ∑ n N n ( λ r d i s ( R i t , R n t ) − d i s ( R i s , R n s ) ) 2 L_{real}=\sum_i^N \sum_n^{N_{n}} \sqrt{(\lambda _{r}dis(R_{i}^{t},R_{n}^{t})-dis(R_{i}^{s},R_{n}^{s}))^2} Lreal=i∑Nn∑Nn(λrdis(Rit,Rnt)−dis(Ris,Rns))2
其中 N n N_n Nn是相对于当前描述符的负描述符的总数。 R t i R_t^i Rti和 R s i R_s^i Rsi分别是教师和学生产生的当前重估描述符, R t n R_t^n Rtn和 R s n R_s^n Rsn是相应的负描述符。此外,由于教师和学生之间的维度不同,我们增加了一个系数λr,设置为0.95来调整教师侧距离的尺度
二值项负描述符损失项:
L b i n = ∑ i N ∑ n N n 1 N n ( λ b d i s ( B i t , B n t ) − d i s ( B i s , B n s ) ) 2 L_{bin}=\sum_i^N \sum_n^{N_{n}} \frac{1}{N_n} \sqrt{(\lambda _{b}dis(B_{i}^{t},B_{n}^{t})-dis(B_{i}^{s},B_{n}^{s}))^2} Lbin=i∑Nn∑NnNn1(λbdis(Bit,Bnt)−dis(Bis,Bns))2
其中λb是缩放系数,通常设置为两个模型的输出维度之间的比率:Ds/Dt。在训练阶段的到二进制描述符计算公式:
B i = R i a b s ( R i ) + ϵ B_{i}=\frac{R_i}{abs(R_i)+\epsilon} Bi=abs(Ri)+ϵRi
这里 ϵ \epsilon ϵ是防止被0整除的系数,设为1e-5。
最后,将这两个损失项合并为蒸馏损失函数:
L d i s t i l l a t i o n = L r e a l + γ L b i n L_{distillation}=L_{real}+\gamma L_{bin} Ldistillation=Lreal+γLbin
其中 γ \gamma γ是二值项的加权系数。
2.4 学生训练
第一阶段,使用学习率为0.01的ADAM优化器训练教师模型。这个过程使模型能够生成高质量的128维描述符。基本损耗函数为:
L b a s i c = L T + α B L B L_{basic}=L_{T}+\alpha _BL_{B} Lbasic=LT+αBLB
其中 α B \alpha _B αB是控制二值化损失 L B L_B LB的加权系数。
在第二阶段,在老师的监督下训练学生模型,学习率设为0.01。因此,目标函数既包括基本损失Lbasic,也包括蒸馏损失Ldistillation,可表示为:
L t r a i n = L b a s i c + β L d i s t i l l a t i o n L_{train}=L_{basic}+\beta L_{distillation} Ltrain=Lbasic+βLdistillation
其中 β \beta β为蒸馏损失加权系数,在训练时设置为2。
3 实验与结果
3.1 特征匹配实验
使用UBC数据集:整个数据集包含大约400k个64×64个带标签的补丁,在一个子集上训练模型,并在另外两个子集上测试它。通过报告95%召回率(FPR95)的假阳性率来展示匹配性能。
采用几种方法作为基准方法。第一类是基于cnn的方法,包括HardNet、SOSNet、HyNet等。第二类方法是一些传统的方法,包括SIFT、BRIEF、LDAHash、BinBoost。还报告了每种CNN方法的参数数量和时间消耗(生成500个描述符),以可视化描述符生成效率。
此外,为了测试泛化能力,文章评估了在HPatches数据集上训练并在UBC数据集上测试的CNN方法的性能。
实验结果如下表所示:

- 由表1可以看出,基于cnn的方法明显优于传统方法。另一方面,匹配结果表明,即使没有蒸馏,所提出的方法也可以与大多数基于cnn的方法相媲美。此外,在KD方法的帮助下,文中的网络能够优于所有基线方法。
- 由表2可以看出,文中的模型比基线CNN模型轻30%左右,运行速度也比基线方法快。
- 由表3可以看出,因为尽管在不同的数据集上训练,但它的性能与CNN方法相当。
3.2 MR-SLAM实验
MR-VINS的详细框架如下图所示:
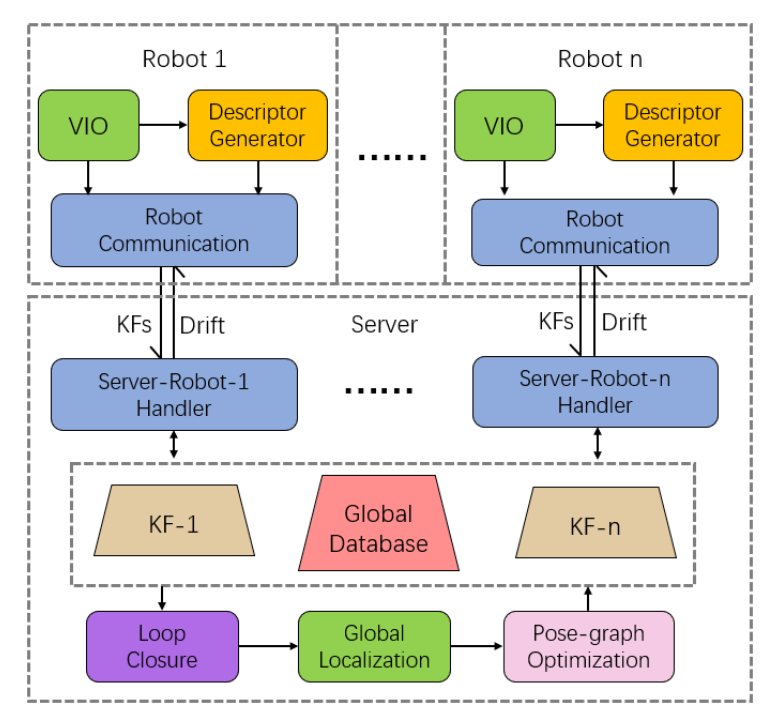
整个系统采用集中式架构,即MR-SLAM系统由多个机器人和一个中央服务器组成。将视觉惯性里程计模块放在机器人上,而将后端模块放在服务器上。在此框架的基础上,在机器人一侧添加了CNN描述符模型,主要将描述符用于循环闭合和全局定位。作者将描述符模型放在机器人通信模块之前,以便描述符可以集成到发送到服务器的关键帧消息中。
使用公共EuRoC数据集,采用定位精度和通信带宽两项指标进行评价。
SLAM精度的定量结果如下表所示。
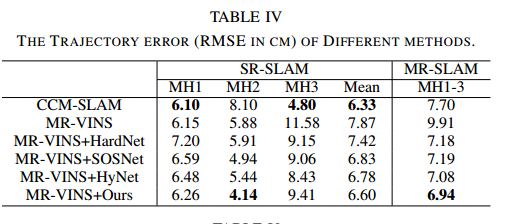
与原始MR-VINS相比,可以看出,基于cnn的方法能够提高定位性能,尤其是MR-SLAM。此外,在单机器人和多机器人任务上,文中的方法总体上达到了与CNN方法相当的精度。然而,由于SLAM的性能不仅仅取决于图像匹配,定位精度优势并不像特征匹配结果那么明显。
下表显示了不同SLAM系统的带宽。
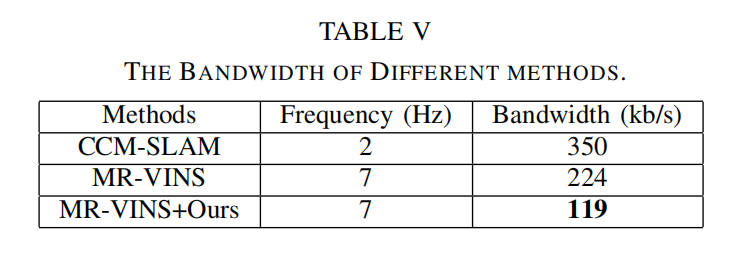
结果表明,文中的方法比原来的MR-VINS和CCM-SLAM具有更低的带宽。由于文中模型的消息频率是CCM-SLAM的3倍,所以文中模型的关键帧信息的大小比CCM-SLAM小10倍左右。窄带宽归因于文中的描述符极其紧凑的尺寸(普通BRIEF描述符的1/4)。此外,由于关键帧尺寸紧凑,就不需要在MR-SLAM任务期间专门降低关键帧频率。
4 总结
在本文中,探讨了如何学习MR-SLAM的紧凑描述符的问题。本文提出了一个师生框架,该框架利用紧凑的学生模型来估计低维描述符。由于教师和学生之间的输出维度不同,作者提出了一个基于距离的蒸馏损失函数,使知识在不同的维度描述符之间蒸馏传递。通过特征匹配实验和MR-SLAM系统的实验,验证了本文所提出算法的有效性。
相关文章:
【文献分享】比目前最先进的模型轻30%!高效多机器人SLAM蒸馏描述符!
论文题目:Descriptor Distillation for Efficient Multi-Robot SLAM 中文题目:高效多机器人SLAM蒸馏描述符 作者:Xiyue Guo, Junjie Hu, Hujun Bao and Guofeng Zhang 作者机构:浙江大学CAD&CG国家重点实验室 香港中文大学…...
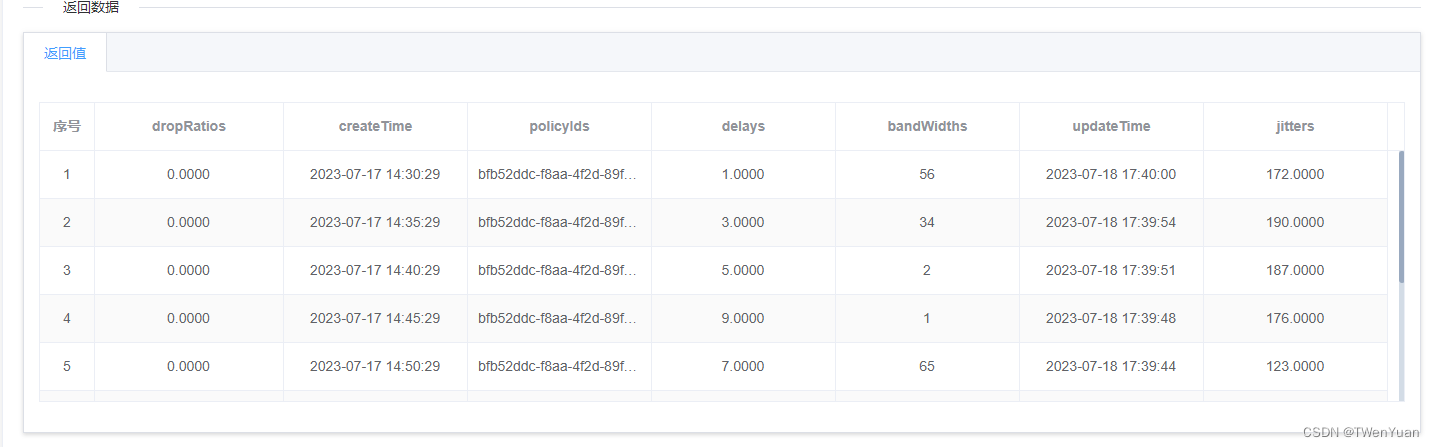
【数据动态填充到element表格;将带有标签的数据展示为文本格式】
一:数据动态填充到element表格; 二:将带有标签的数据展示为文本格式; 1、 <el-row><el-col :span"24"><el-tabs type"border-card"><el-tab-pane label"返回值"><el-…...

小程序轮播图的两种后台方式(PHP)--【浅入深出系列008】
微信目录集链接在此: 详细解析黑马微信小程序视频–【思维导图知识范围】难度★✰✰✰✰ 不会导入/打开小程序的看这里:参考 让别人的小程序长成自己的样子-更换window上下颜色–【浅入深出系列001】 文章目录 本系列校训学习资源的选择啥是轮播图轮播…...
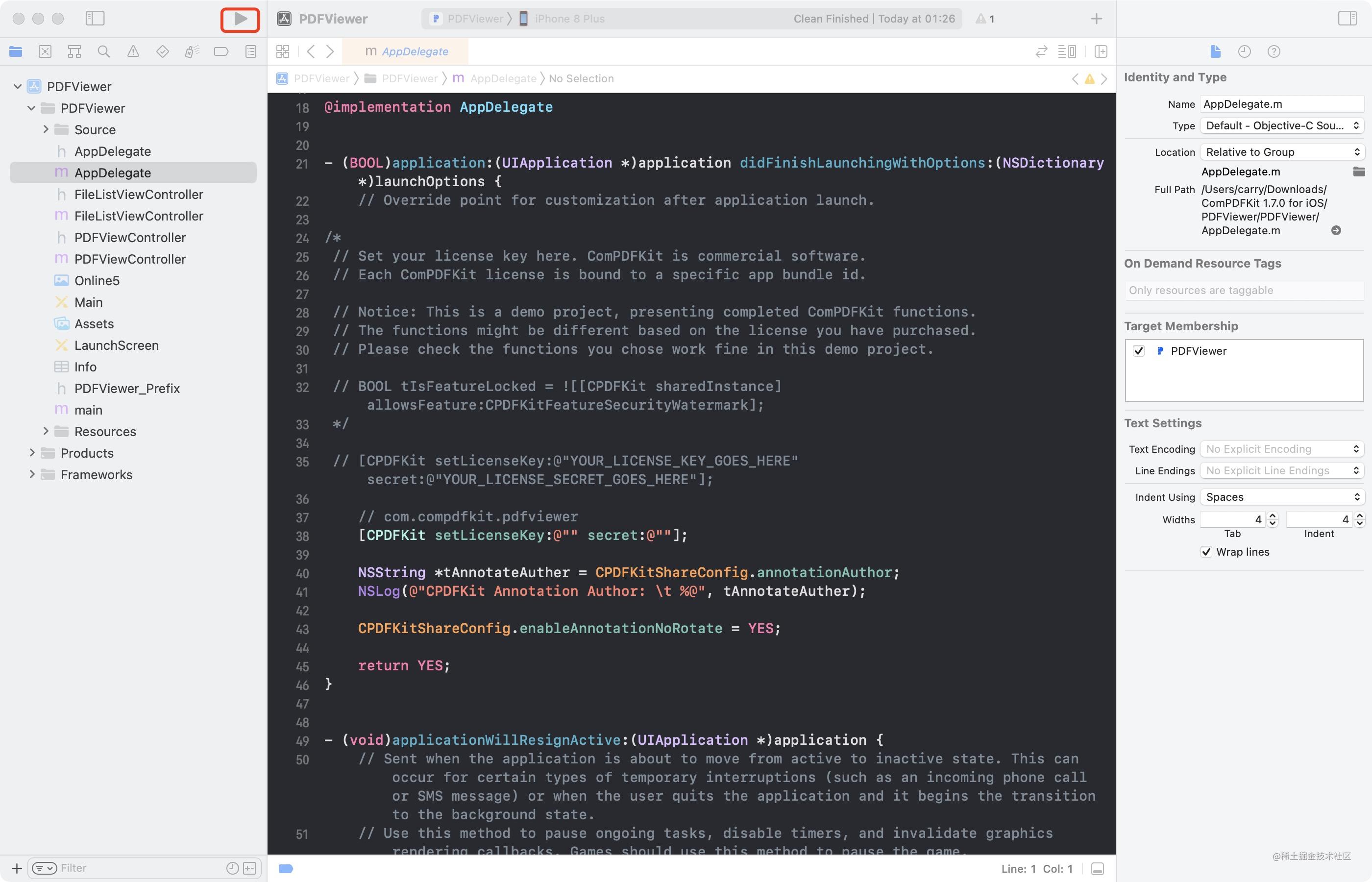
使用ComPDFKit PDF SDK 构建iOS PDF阅读器
在当今以移动为先的世界中,为企业和开发人员创建一个iOS应用程序是必不可少的。随着对PDF文档处理需求的增加,使用ComPDFKit这个强大的PDF软件开发工具包(SDK)来构建iOS PDF阅读器和编辑器可以让最终用户轻松查看和编辑PDF文档。 …...

一套流程6个步骤,教你如何正确采购询价
采购询价(RFQ)是一种竞争性投标文件,用于邀请供应商或承包商就标准化或重复生产的产品或服务提交报价。 询价通常用于大批量/低价值项目,买方必须提供技术规格和商业要求,该文件有时也称为招标书或投标邀请书。询价流…...

git使用
常用命令 git init git库初始化,初始化后会在文件中出现一个.git的隐藏文件 git clone 从远程克隆仓库 git pull 从远程库中拉取 git commit 将暂存提交到本地仓库 git push 提交本地仓库到远程 git branch 查看当前分支 git branch <branchName> 切换分支 …...
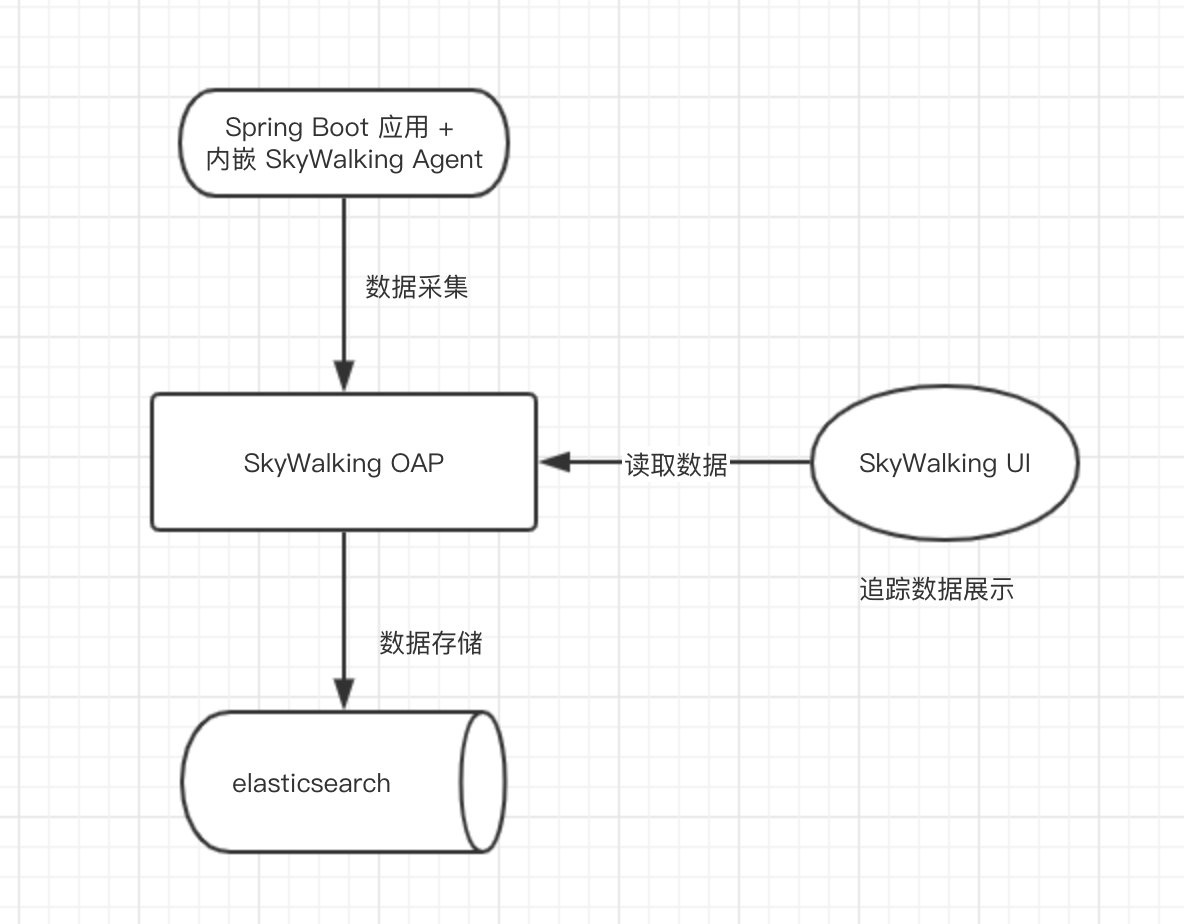
SkyWalking链路追踪-搭建-spring-boot-cloud-单机环境 之《10 分钟快速搭建 SkyWalking 服务》
首先了解一下单机环境 第一步,搭建一个 Elasticsearch 服务。第二步,下载 SkyWalking 软件包。第三步,搭建一个 SkyWalking OAP 服务。第四步,启动一个 Spring Boot 应用,并配置 SkyWalking Agent。第五步,…...
Rabbit MQ整合springBoot
一、pom依赖二、消费端2.1、application.properties 配置文件2.2、消费端核心组件 三、生产端3.1、application.properties 配置文件2.2、生产者 MQ消息发送组件四、测试1、生产端控制台2、消费端控制台 一、pom依赖 <dependency><groupId>org.springframework.boo…...
:time.Time)
Golang 中的 time 包详解(一):time.Time
在日常开发过程中,会频繁遇到对时间进行操作的场景,使用 Golang 中的 time 包可以很方便地实现对时间的相关操作。接下来的几篇文章会详细讲解 time 包,本文先讲解一下 time 包中的结构体 time.Time。 time.Time time.Time 类型用来表示一个…...
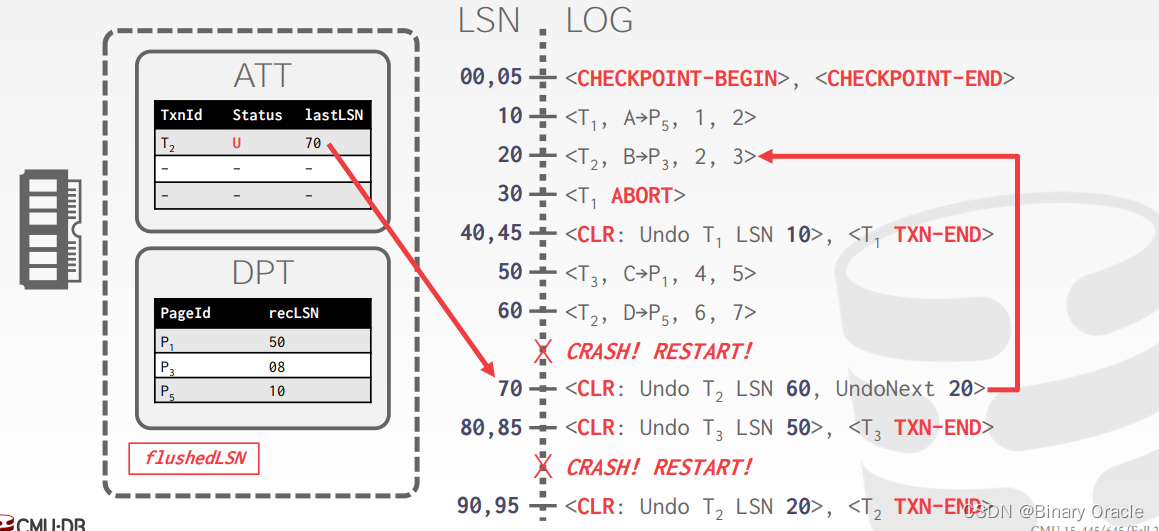
CMU 15-445 -- Database Recovery - 18
CMU 15-445 -- Database Recovery - 18 引言ARIESLog Sequence NumbersNormal ExecutionTransaction CommitTransaction AbortCompensation Log Records Non-fuzzy & fuzzy CheckpointsSlightly Better CheckpointsFuzzy Checkpoints ARIES - Recovery PhasesAnalysis Phas…...
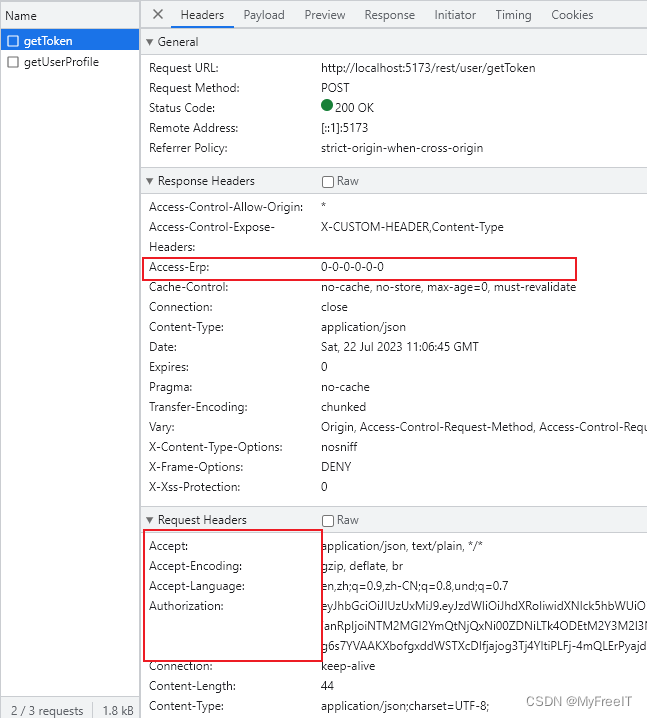
HTTP Header定制,客户端使用Request,服务器端使用Response
在服务器端通过request.getHeaders()是无效的,只能使用response.getHeaders()。 Overridepublic Object beforeBodyWrite(Object body, MethodParameter returnType, MediaType mediaType,Class selectedConverterType, ServerHttpRequest request, ServerHttpRespo…...

Vue 3编写的父子组件示例,包括传递数据和调用父组件方法
下面是一个使用Vue 3编写的父子组件示例,包括传递数据和调用父组件方法: ChildComponent.vue: <template><div><p>Child Component</p><p>Message: {{ message }}</p><button click"updateMes…...
[ 容器 ] Docker 的数据管理
目录 一、Docker 的数据管理1.1 数据卷2. 数据卷容器 二、 端口映射三、容器互联(使用centos镜像)四、Docker 镜像的创建1.基于现有镜像创建2.基于本地模板创建3.基于Dockerfile 创建3.1 联合文件系统(Unio…...
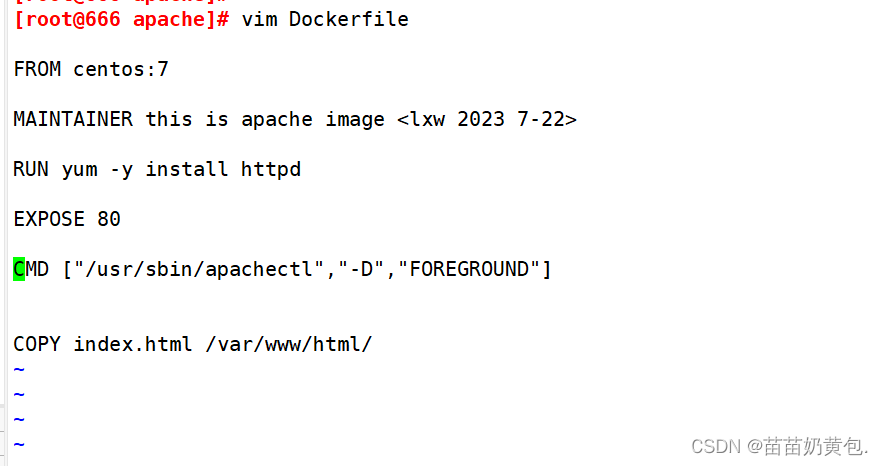
【环境配置】使用Docker搭建LAMP环境
这篇文章不是介绍DOCKER是什么,也不是阐述DOCKER的核心:镜像/容器和仓库之间的关系,它只是一篇让刚刚接触DOCKER的初学者,在没有完全了解DOCKER是什么之前,也能尽快的在Linux系统下面通过DOCKER来搭建一个LAMP环境,这是其一&#…...
)
MLIR (Multi-Level Intermediate Representation)
MLIR(Multi-Level Intermediate Representation)是一种多级中间表示的编译器基础架构,旨在提供通用的、可扩展的编译器基础设施。它最初由谷歌开发,并且现在已经成为一个开源项目,受到广泛关注和采用。 MLIR 的设计理…...

VR全景在酒店的发展状况如何?酒店该如何做营销?
现阶段,VR全景技术已经被酒店、民宿、旅游景区、房产楼盘、校园等行业所应用,每天都有不少人通过VR全景展示来了解酒店的设施环境,而酒店也可以借此机会,详细展示自身优势,更大范围吸引顾客。 VR酒店拥有真实、立体的全…...

Winform使用PictureBox控件显示图片并且自适应
一.首先我们只需要在项目文件中的/bin/Debug 下面创建一个文件夹保存你的照片。我这里文件夹名字叫Resources.。如图: 二. 然后我们把我们的照片放入Resources文件夹中即可。如图: 三.在构造器中添加picturebox控件。如图: 四.我们到初始化代…...

HTML中的焦点管理
前言 焦点作为页面交互中的重要一环,涉及到的知识点也比较多,有必要做一个统一的总结。 HTML 中的可获取焦点的元素 具有 href 属性的 HTMLAnchorElement/HTMLAreaElement非禁用态的 HTMLInputElement/HTMLSelectElement/HTMLTextAreaElement/HTMLBut…...

如何区分接口测试和功能测试
接口测试和功能测试的区别: 2023最新Jmeter接口测试从入门到精通(全套项目实战教程) 本文主要分为两个部分: 第一部分:主要从问题出发,引入接口测试的相关内容并与前端测试进行简单对比,总结两者…...

limit分页查询
controller层 ApiOperation("员工分页查询")GetMapping("/page")public Result<PageResult> page(EmployeePageQueryDTO employeePageQueryDTO){log.info("员工分页查询,参数为{}",employeePageQueryDTO);PageResult pageResul…...

IPD的势、道、法、术、器
目录 简介 一、势:为什么 IPD 是必然选择? 二、道:IPD 的底层哲学 三、法与术:从战略到执行的具体路径 四、器:让流程真正落地的工具与组织 不是每家公司都需要全套 IPD,但每家公司都需要 IPD 思维 简…...

CANN-昇腾NPU-RAG推理-检索增强生成怎么部署
RAG(Retrieval-Augmented Generation)是 LLM 知识库的组合:先检索相关文档,再让 LLM 基于文档回答。昇腾NPU 上部署 RAG 需要两个组件:Embedding 模型(做向量检索)和 LLM(做生成&am…...

Wechat2RSS:微信公众号转RSS订阅工具
文章目录Wechat2RSS:微信公众号转RSS订阅工具Wechat2RSS:微信公众号转RSS订阅工具 ttttmr开源的Wechat2RSS项目,目前在GitHub上获得1409颗Star,项目地址为https://github.com/ttttmr/Wechat2RSS。该工具的核心作用是将微信公众号…...
上午题回忆与解析(非标答版))
2026上半年数据库系统工程师(软考)上午题回忆与解析(非标答版)
本文为考后回忆整理,非官方标准答案,旨在为考后对答案及下半年备考的同学提供参考。题目顺序和表述可能与原卷有出入,欢迎在评论区指正、补充。📊 整体考情分析 刚结束的2026年上半年数据库系统工程师考试,上午题的风格…...

全链路压测实战:双十一级别的流量,我是这样扛住的
作为一名在质量保障领域摸爬滚打多年的测试工程师,我深知传统的单接口压测在如今分布式架构下的无力感。当业务流量达到双十一这种脉冲式、高并发的级别时,任何一个非核心链路上的“短板”都可能引发系统性的雪崩。全链路压测不再是选择题,而…...

千亿镁合金产业集群正在成形:成都、抚州、池州的新版图
一个新赛道的地理坐标 如果要在中国地图上标注一条正在成形的新兴产业集群走廊,高强镁合金这条线,值得被认真画出来。 成都龙泉驿——江西抚州临川——安徽池州高新区,三个坐标,三条生产线,一家公司,两年内…...
)
保姆级教程:Windows系统下Arcgis 10.2从下载、安装到汉化一次搞定(附常见License启动失败解决方案)
Windows系统下Arcgis 10.2完整安装与汉化实战指南第一次接触Arcgis的新手往往会被复杂的安装流程和神秘的License Manager搞得晕头转向。作为一款功能强大的地理信息系统软件,Arcgis在科研、城市规划、环境监测等领域有着广泛应用,但它的安装过程确实会让…...

解密高校教师必会的Gemini 3.1 Pro五大科研隐藏技能:从论文评估到创新点锁定
各位同仁好,我是七哥。一个在高校里从事人工智能相关领域研究,钻研用大模型AI实操的学术人。可以和七哥交流学术写作或Gemini、GPT、Claude等大模型学术实操相关问题,多多交流,相互成就,共同进步。 科研路上,有人发完顶刊顺利晋升,有人还在为创新点抓耳挠腮。 大多数教…...

三步让小爱音箱秒变AI语音助手:MiGPT深度配置指南
三步让小爱音箱秒变AI语音助手:MiGPT深度配置指南 【免费下载链接】mi-gpt 🏠 将小爱音箱接入 ChatGPT 和豆包,改造成你的专属语音助手。 项目地址: https://gitcode.com/GitHub_Trending/mi/mi-gpt 还在为小爱音箱的"人工智障&q…...

零基础怎么学Agent?这个工程师考试内容拆给你看
站在 AI Agent(智能体)爆发的十字路口,很多既没有深厚算法背景、也没有丰富写代码经验的“小白”常常感到迷茫:动辄谈及的大模型交互、复杂的业务编排,零基础真的能学会吗? 事实上,智能体开发早…...