cartographer发布畸变矫正后的scan数据
实现方式:
模仿源代码,在cartographer_ros写一个函数,以函数指针的方式传入cartographer后端,然后接收矫正后的scan数据,然后按照话题laserScan发布出来。
需要同时发布点云强度信息的,还要自己添加含有强度信息的代码。
核心转换代码如下:
for (size_t i = 0; i < synchronized_data.ranges.size(); ++i) {const sensor::TimedRangefinderPoint& hit =synchronized_data.ranges[i].point_time;const Eigen::Vector3f origin_in_local =range_data_poses[i] *synchronized_data.origins.at(synchronized_data.ranges[i].origin_index);sensor::RangefinderPoint hit_in_local =range_data_poses[i] * sensor::ToRangefinderPoint(hit);const Eigen::Vector3f delta = hit_in_local.position - origin_in_local;const float range = delta.norm();if (range >= options_.min_range()) {if (range <= options_.max_range()) {hit_in_local.intensity = synchronized_data.ranges[i].intensity; //accumulated_range_data_.returns.push_back(hit_in_local);//transform::Rigid3f sensor_to_tracking = transform::Rigid3f::Translation(Eigen::Vector3f(synchronized_data.origins.at(synchronized_data.ranges[i].origin_index)[0],synchronized_data.origins.at(synchronized_data.ranges[i].origin_index)[1],synchronized_data.origins.at(synchronized_data.ranges[i].origin_index)[2]));undistortion_scan_data_.returns.push_back(sensor_to_tracking.inverse() *(range_data_poses[0].inverse() * hit_in_local));} else {hit_in_local.position =origin_in_local +options_.missing_data_ray_length() / range * delta;hit_in_local.intensity = synchronized_data.ranges[i].intensity; // accumulated_range_data_.misses.push_back(hit_in_local);//transform::Rigid3f sensor_to_tracking = transform::Rigid3f::Translation(Eigen::Vector3f(synchronized_data.origins.at(synchronized_data.ranges[i].origin_index)[0],synchronized_data.origins.at(synchronized_data.ranges[i].origin_index)[1],synchronized_data.origins.at(synchronized_data.ranges[i].origin_index)[2]));undistortion_scan_data_.returns.push_back(sensor_to_tracking.inverse() *(range_data_poses[0].inverse() * hit_in_local));}}else{//hit_in_local.position = Eigen::Vector3f::Zero();//origin_in_local + 0.0 / range * delta;hit_in_local.intensity = 0; // //accumulated_range_data_.misses.push_back(hit_in_local);//undistortion_scan_data_.returns.push_back(hit_in_local);}}
其他:改的地方其实挺多,因为
1.我把强度信息也传进去了。
2.对于注册返回的函数指针,为了不破坏原有的代码结构,都是自己添加新的接口。
3.因为源代码对于一些异常点进行了移除,而我要保留所有矫正后的点,所以也修改了部分代码。
4.最核心的就是数据转换,因为carto处理后的数据的坐标系是local的,所以要要逆变换回来。因为carto传入的数据考虑了激光头的外参数,所以传回来也要外参数逆变换回来。
好了,大家可以开心的使用畸变矫正后的scan话题了。
相关文章:

cartographer发布畸变矫正后的scan数据
实现方式: 模仿源代码,在cartographer_ros写一个函数,以函数指针的方式传入cartographer后端,然后接收矫正后的scan数据,然后按照话题laserScan发布出来。 需要同时发布点云强度信息的,还要自己添加含有强度…...
Idea中git push to origin/master was rejected错误解决方案
Idea中git push to origin/master was rejected错误解决方案 问题描述解决方法 问题描述 idea开发中,需要将项目发布到gitee上,在gitee上创建仓库后,通过idea中git推送项目代码提示: push to origin/master was rejected 解决方法 gitee创建仓库时创建了README.md文件,本地…...

docker版jxTMS使用指南:自定义频率型动态管控
本文讲解4.4版jxTMS中如何自行定义一个频率型的动态管控,整个系列的文章请查看:docker版jxTMS使用指南:4.4版升级内容 docker版本的使用,请查看:docker版jxTMS使用指南 4.0版jxTMS的说明,请查看ÿ…...
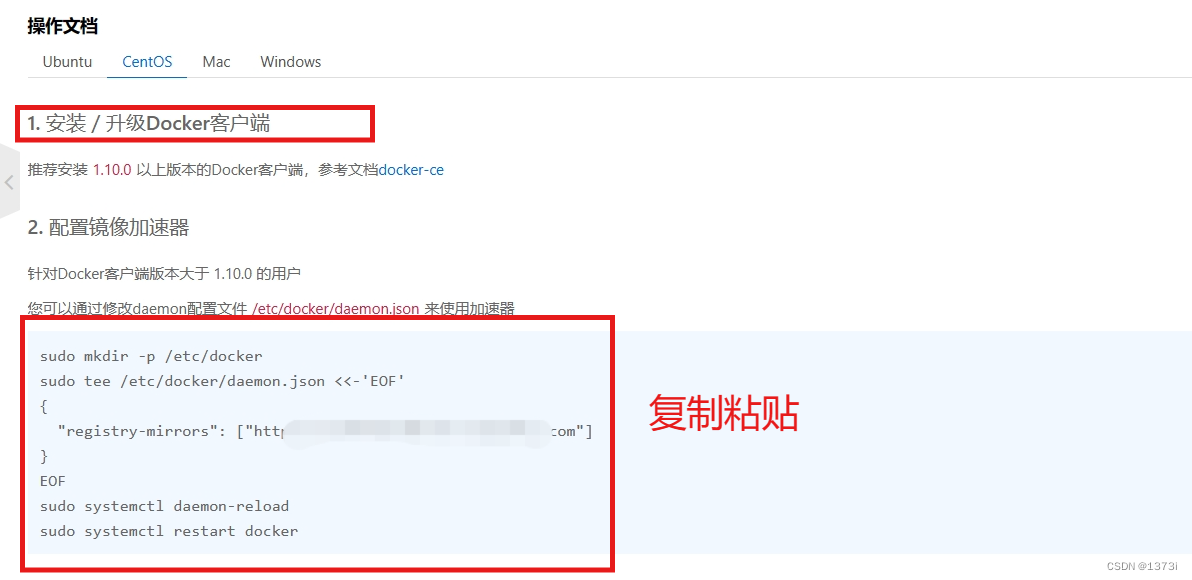
【Docker】初识Docker以及Docker安装与阿里云镜像配置
目录 一、初识Docker 二、安装Docker 三、Docker架构 四、配置Docker镜像加速器 一、初识Docker Docker是一个开源的应用容器引擎,诞生于2013年,基于Go语言实现,dotCloud公司出品,Docker开源让开发者打包他们的应用以及依赖包到…...

C语言:动态内存管理
文章目录 一、动态内存函数1. malloc2. calloc3. realloc4. free 二、常见的错误1.malloc或calloc开辟的空间未检查2.越界访问3.对非malloc和calloc开辟的空间,用free释放4.对同一块动态内存多次释放5.用free释放动态内存的一部分 三、通讯录(动态版本改写)总结 一、…...

如何往MySQL中插入100万条数据?
需求 现在有一个 数据量 为100万的数据样本 100w_data.sql 其数据格式如下,截取最后十条数据 999991,XxGdnLZObA999991,XxGdnLZObA,XxGdnLZObA,2020-3-18,1 999992,TBBchSKobC999992,TBBchSKobC,TBBchSKobC,2020-9-8,2 999993,rfwgLkYhUz999993,rfwgLkYhUz,rfwgLk…...
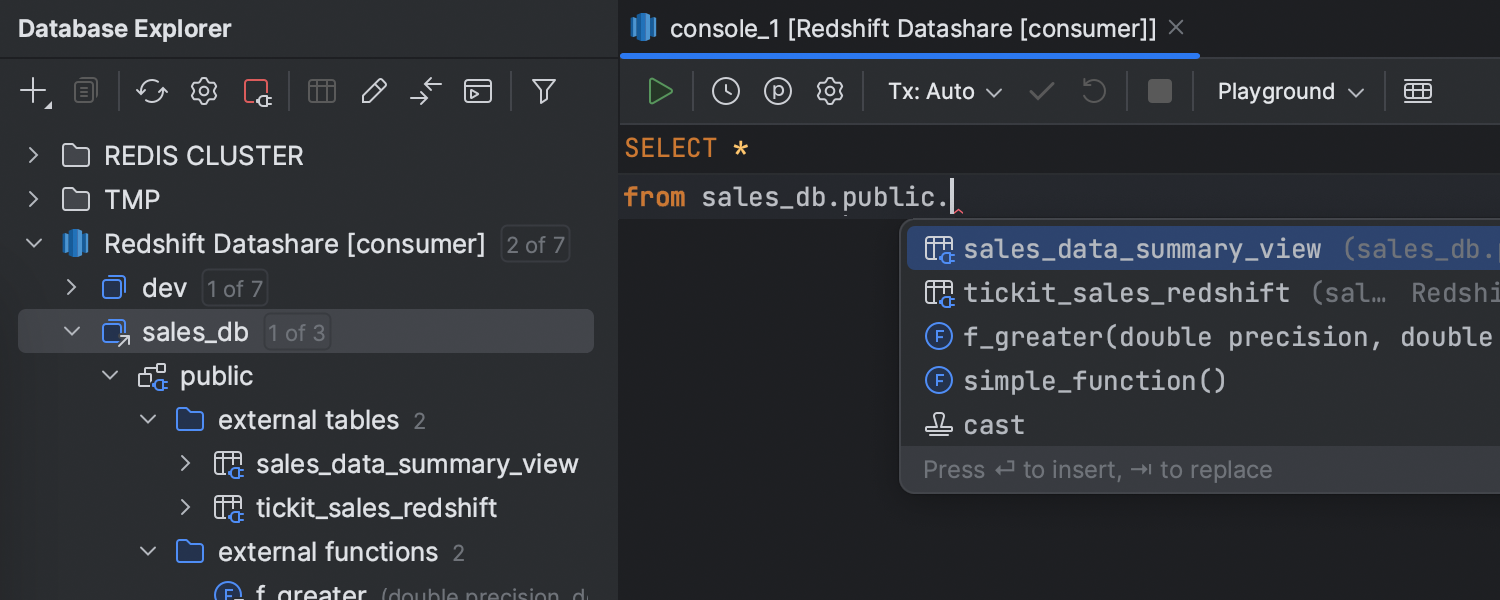
IntelliJ IDEA 2023.2 最新变化
主要更新 AI Assistant 限定访问 Ultimate 在此版本中,我们为 IntelliJ IDEA 引入了一项重要补充 – AI Assistant。 AI Assistant 当前具备一组由 AI 提供支持的初始功能,提供集成式 AI 聊天,可以完成一些任务,例如自动编写文档…...

1300*B. T-primes
解析: 有且只有三个因数,当且仅当,完全平方数并且sqrt(n)为素数 #include<bits/stdc.h> using namespace std; typedef long long ll; const int N1e55; ll t,n; bool prime(ll x){if(x<2) return 0;for(int…...

重新C++系列之运算符重载
一、什么是运算符重载 简单来讲就是对运算符赋予新的意义,但是又不能改变原有的含义,它本身也就是一个函数。运算符重载的本质是以函数的方式来体现。 二、运算符重载有几种 1、按照作用域来划分,有全局操作符重载函数和成员函数操作符重载函…...

kotlin异常处理try-catch-finally
kotlin异常处理try-catch-finally fun main(args: Array<String>) {try {println("a")} catch (e: Exception) {//异常捕获println("a-catch: $e")} finally {//善后,无论是否异常,都会执行println("a-finally")}t…...

Pytorch在cuda、AMD DirectML和AMD CPU下性能比较
一、测试环境 CUDA环境: i7-8550u 16G DDR4 2133MHz nVidia MX150 2GB AMD DirectML环境: Ryzen 5 5600G 32G DDR4 3200MHz Vega7 4GB AMD 纯CPU环境:Ryzen 5 5600G 32G DDR4 3200MHz 其他硬件配置的硬盘、电源均一致。Pytorch版本为2.0.0,Pyt…...

哈工大计算机网络课程局域网详解之:交换机概念
哈工大计算机网络课程局域网详解之:交换机概念 文章目录 哈工大计算机网络课程局域网详解之:交换机概念以太网交换机(switch)交换机:多端口间同时传输交换机转发表:交换表交换机:自学习交换机互…...

Jenkins Pipeline的hasProperty函数
函数的作用 用于判断某个参数或者字段是否存在。 用法 例子一 def projectStr "P1,P2,P3" pipeline {agent anyparameters {extendedChoice(defaultValue: "${projectStr}",description: 选择要发布的项目,multiSelectDelimiter: ,,name: SELECT_PROJ…...

芯片制造详解.净洁室的秘密.学习笔记(三)
这是芯片制造系列的第三期跟学up主三圈,这里对其视频内容做了一下整理和归纳,喜欢的可以看原视频。 芯片制造详解03: 洁净室的秘密|为何芯片厂缺人? 芯片制造详解.净洁室的秘密.学习笔记 三 简介一、干净的级别二、芯片…...
可解释的 AI:在transformer中可视化注意力
Visualizing Attention in Transformers | Generative AI (medium.com) 一、说明 在本文中,我们将探讨可视化变压器架构核心区别特征的最流行的工具之一:注意力机制。继续阅读以了解有关BertViz的更多信息,以及如何将此注意力可视化工具整合到…...

k8s Webhook 使用java springboot实现webhook 学习总结
k8s Webhook 使用java springboot实现webhook 学习总结 大纲 基础概念准入控制器(Admission Controllers)ValidatingWebhookConfiguration 与 MutatingWebhookConfiguration准入检查(AdmissionReview)使用Springboot实现k8s-Web…...
JS逆向之猿人学爬虫第20题-wasm
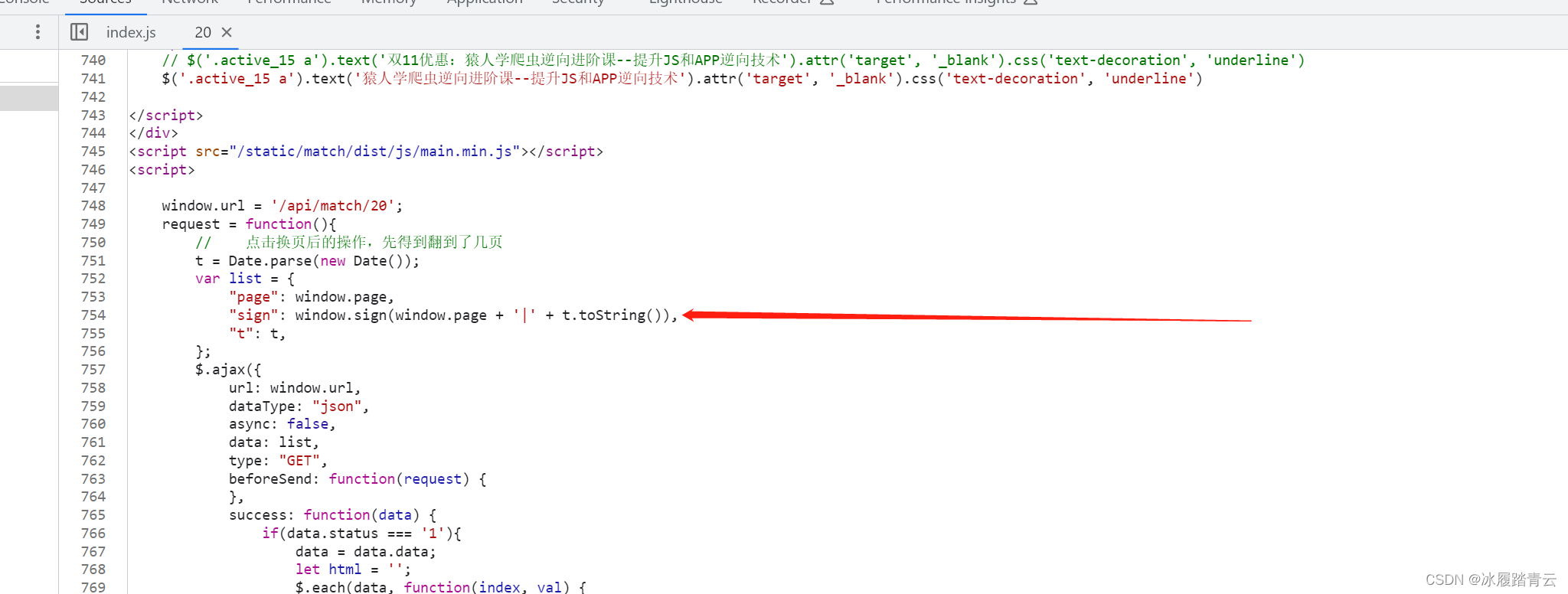
文章目录 题目地址sign参数分析python算法还原往期逆向文章推荐题目地址 https://match.yuanrenxue.cn/match/20第20题被置顶到了第1页,题目难度 写的是中等 算法很简单,就一个标准的md5算法,主要是盐值不确定, 而盐值就在wasm里面,可以说难点就在于wasm分析 sign参数分…...
【双指针优化DP】The 2022 Hangzhou Normal U Summer Trials H
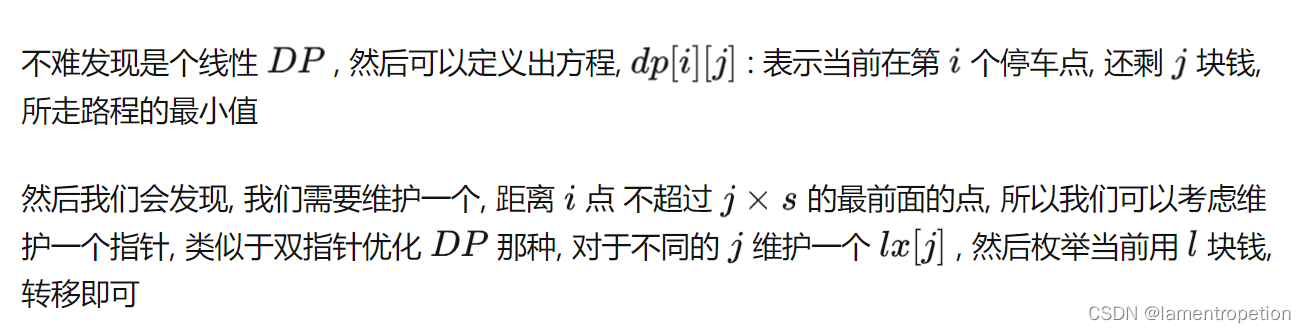
Problem - H - Codeforces 题意: 思路: 首先很明显是DP 因为只有1e6个站点,因此可以以站点作为阶段 注意到K很小,因此可以尝试把这个当作第二维 设dp[i][j]为到达第i个站点,已经花了j元钱的最小步数 然后就想了一…...

[论文笔记] LLM数据集——金融数据集
一、chatglm_金融 ModelScope 魔搭社区 请将modelscope sdk升级到v1.7.2rc0,执行: pip3 install "modelscope1.7.2rc0" -f https://modelscope.oss-cn-beijing.aliyuncs.com/releases/repo.html # 方式1 git clone http://www.modelscope…...

在亚马逊平台,如何有效举报违规行为?
众所周知,在每个行业都有一些违规现象,甚至这些违规现象还会给自己带来利益方面的损失,一旦触犯到自己的利益的话,那自己是需要想办法解决的,想办法规避。 就拿开亚马逊店铺来说,比较容易遇到的就是产品侵…...

ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题
ComfyUI-Manager终极指南:3个核心功能彻底解决AI工作流管理难题 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable vari…...

别再让模型在Unity里‘抽风’了!Blender导出FBX到Unity的7步避坑自查清单
别再让模型在Unity里‘抽风’了!Blender导出FBX到Unity的7步避坑自查清单当你花了三天三夜精心雕琢的Blender模型,导入Unity后却变成了一团旋转错乱、贴图闪烁的"抽象艺术",那种崩溃感每个3D开发者都懂。本文将用实战经验帮你建立一…...

用STM32CubeMX和HAL库快速上手WS2812B:告别手动计算延时,一键生成驱动框架
基于STM32CubeMX的WS2812B智能灯光控制:从零构建现代化驱动方案在智能硬件和物联网设备快速发展的今天,WS2812B可编程LED灯带因其丰富的色彩表现和简单的单线控制方式,成为创客和工程师们最喜爱的显示组件之一。然而,传统的寄存器…...

告别道路预测老套路:用ParkPredict+模型思路,解决停车场里的‘鬼探头’难题
破解泊车场景预测困局:ParkPredict模型的技术革新与实践停车场里的每一次转向、倒车和避让,都是对自动驾驶系统预测能力的极限挑战。与开放道路的规则明确不同,这里没有清晰的车道线指引,没有统一的行驶方向,只有随时可…...

照着用就行:2026 最新降AIGC软件测评与推荐
2026年真正好用的AI论文降重与改写工具,核心看降重效果、去AI味、格式保留、学术适配四大指标。综合实测,千笔AI、ThouPen、豆包、DeepSeek、Grammarly 是当前最值得推荐的梯队,覆盖从免费到付费、从中文到英文、从文科到理工的全场景需求。 …...

PDF 可视化签名盖章页技术解析
本文是我在设备检测系统项目开发中,无设备检测的技术实现备忘录,记载实现过程。 本文以 PC 端页面 sign-pdf.vue 为主线,说明「无设备报检」在报告审批环节如何通过前后端协作,完成报告/记录 PDF 上的签名、印章、报告编号拖放定位,并在审批通过后由后端合并生成带签章的正…...

翻译 GDB 官方文档
翻译 GDB 官方文档项目地址官方文档地址下载源码包编译html运行翻译程序项目地址 https://github.com/shootercheng/gdb-translate.git 项目结构 $ tree -L 1 . ├── cmd ├── go.mod ├── input ├── internal ├── LICENSE ├── output ├── README.md ├─…...

【Lindy营销自动化工作流终极指南】:20年实战验证的7大反脆弱性设计原则,92%企业漏掉的关键衰减阈值
更多请点击: https://intelliparadigm.com 第一章:Lindy营销自动化工作流的基本范式与历史验证 Lindy效应指出,一个事物的预期剩余寿命与其当前年龄成正比——在营销自动化领域,Lindy范式体现为:经时间检验仍被广泛采…...

DeepSeek重复代码识别失效了?5个被90%团队忽略的AST解析盲区及修复清单
更多请点击: https://codechina.net 第一章:DeepSeek代码重复检测失效的真相与影响 DeepSeek-R1 模型在代码理解任务中表现出色,但其内置的代码重复检测机制在特定场景下存在系统性失效。根本原因在于模型对语义等价但语法结构差异显著的代…...

基于树莓派打造万能遥控器:从硬件选型到Web控制界面全解析
1. 项目概述:打造一个能“学习”的万能遥控器家里遥控器越来越多,电视、空调、风扇、灯带……每个设备都配一个,找起来麻烦,用起来也乱。市面上所谓的“万能遥控器”其实并不万能,它内置的码库有限,很多小众…...