脚手架(vue-cli)的安装详细教程
首先要下载node.js
下载 | Node.js 中文网 (nodejs.cn)![]() https://nodejs.cn/download/
https://nodejs.cn/download/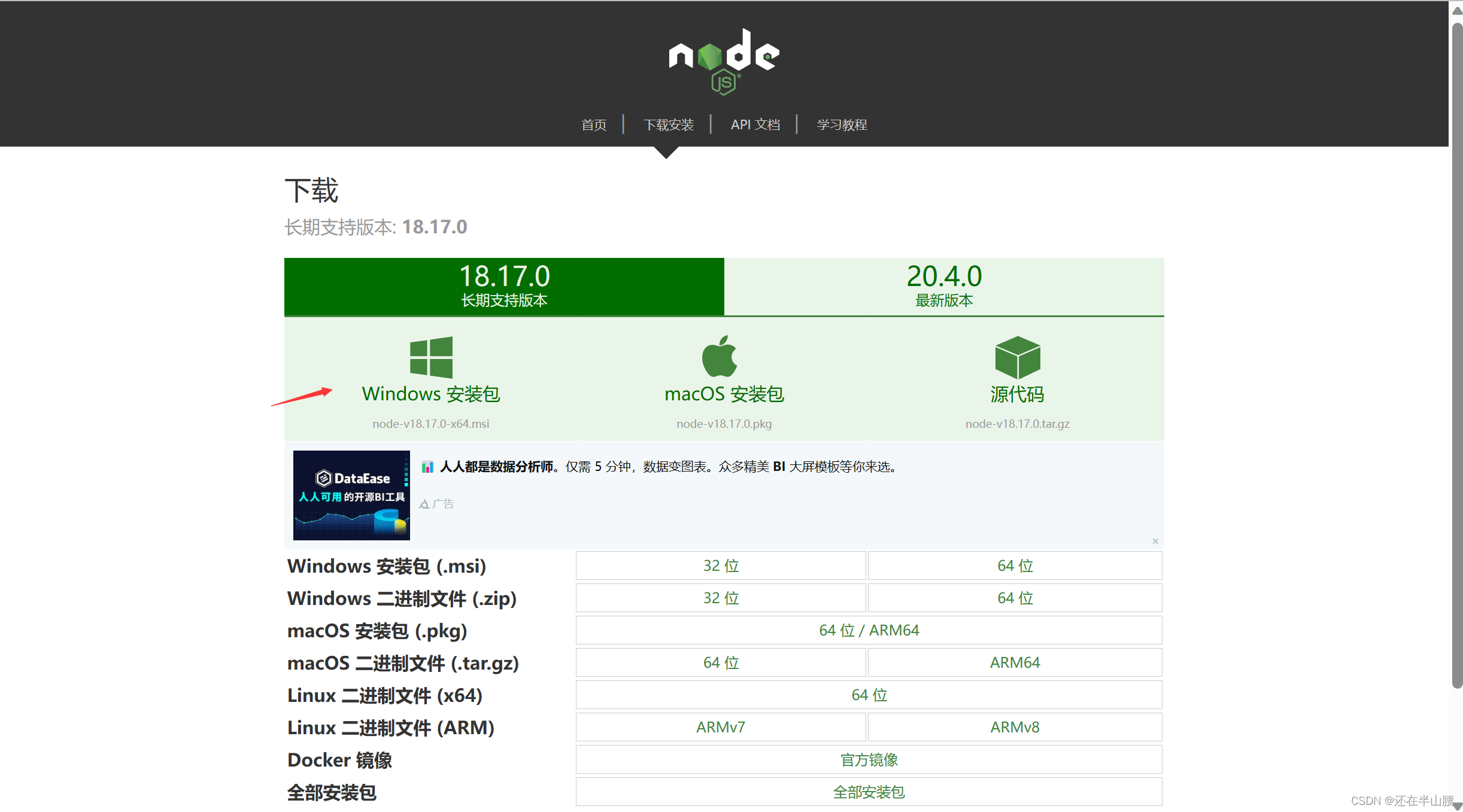
大家根据自己的系统来选择哪个,我是Windows系统,所以选择红色箭头所指的安装包去安装!!!
接下来双击安装!!



 选择要安装的位置,不是必须要安装到C盘中,想安装到哪里就安装到哪里!!!
选择要安装的位置,不是必须要安装到C盘中,想安装到哪里就安装到哪里!!!




接下来打开终端看一下是否安装成功了!!!(按下win+r/R)先按win,再按r/R


输入cmd再按确定
输入终端指令node -v 查看版本号

这时候就会出现对应的版本,如果你能终端打印出来这个,说明已经成功一半了,但是这个版本太高了,有时候运行项目的时候会报错,此时我们需要把版本降低,那么如何把版本降低呢??
官网传送门
下载 | Node.js 中文网 (nodejs.cn)![]() https://nodejs.cn/download/
https://nodejs.cn/download/






把这个东西拖到之前node.js的安装目录下覆盖原来的即可

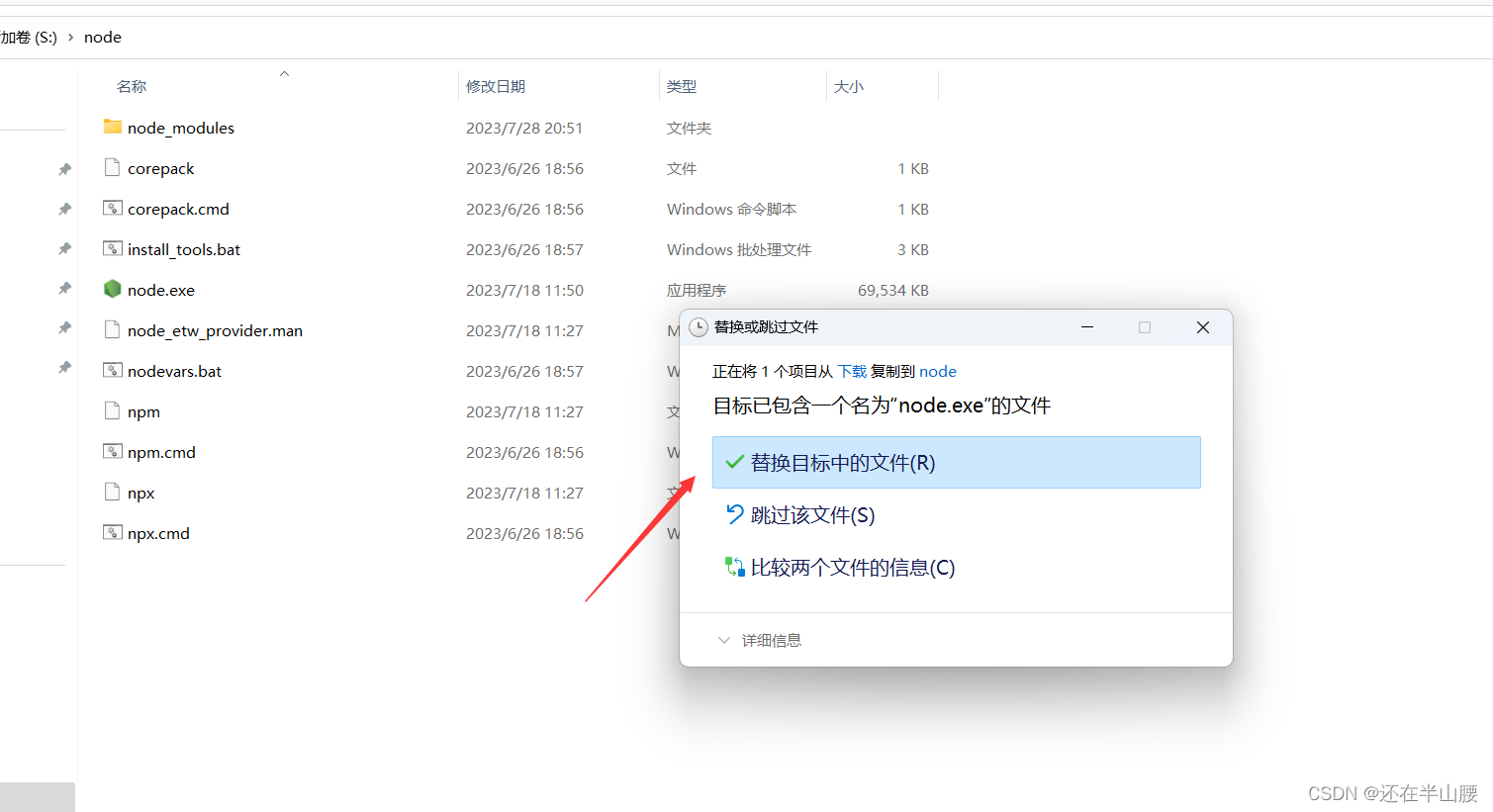
这时候再次打开终端,输入node -v指令,查看版本号!!!

这时候版本就降下来咯!!!
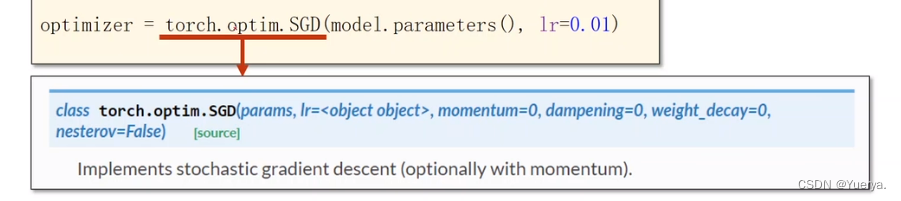
此时终端输入命令npm install -g @vue/cli 下载脚手架

输入命令vue -V查看版本号

这时候就说明脚手架安装成功了!!这时候我们来创建一个Vue项目!!!我们尝试在D盘下面创建一个Vue项目!!!

先切换到D盘下面,然后输入此命令,mytest是项目名称,可以自己取名字!!!然后回车!!!

到了这里他会让你选择创建vue2还是vue3项目,根据自己的需要,这里我以vue2为例,选择Vue2再直接回车!!!之后便是漫长的等待!

此时你会发现你可能卡到一个地方很久,一直没有动 ,这时候我们可以考虑去切换淘宝镜像或者阿里镜像,这样子下载会快许多!!
切换镜像: npm config set registry http://registry.npm.taobao.org/
查看镜像使用状态:npm get registry

这时候重复上面创建vue项目的操作!!!

又卡住了呜呜呜,那就再去试一试别的镜像
切换镜像

切换镜像:npm config set registry https://registry.npmmirror.com/
查看镜像使用状态:npm get registry

重复vue创建操作

啊啊啊 终于成功咯!!!呜呜呜,总之大家多试几次!!!

然后输入他提示的指令,再回车

可以把这个链接复制到浏览器回车,也可以左手按住ctrl,右手鼠标点击,他会发生页面跳转,一般是这样子的,但是不一定所有电脑都行,但是前者肯定是可以的 !

当你看到这个页面的时候,说明一个简单的Vue2项目创建成功咯!!!

在D盘里面也会出现相应的文件夹,可以用vscode或者其他编译器打开!!!
搭建脚手架的方式网上多种多样,并不唯一!!!仅供参考!!!
相关文章:
脚手架(vue-cli)的安装详细教程
首先要下载node.js 下载 | Node.js 中文网 (nodejs.cn)https://nodejs.cn/download/ 大家根据自己的系统来选择哪个,我是Windows系统,所以选择红色箭头所指的安装包去安装!!! 接下来双击安装!!…...
yolov5 onnx模型 转为 rknn模型
1、转换为rknn模型环境搭建 onnx模型需要转换为rknn模型才能在rv1126开发板上运行,所以需要先搭建转换环境 模型转换工具 模型转换相关文件下载: 网盘下载链接:百度网盘 请输入提取码 提取码:teuc 将其移动到虚拟机中…...

Mybatis-Flex
一、Mybatis-Flex是什么? Mybatis-Flex 是一个优雅的 Mybatis 增强框架,它非常轻量、同时拥有极高的性能与灵活性。我们可以轻松的使用 Mybaits-Flex 链接任何数据库,其内置的 QueryWrapper^亮点 帮助我们极大的减少了 SQL 编写的工作的同时…...
C++ | 红黑树以及map与set的封装
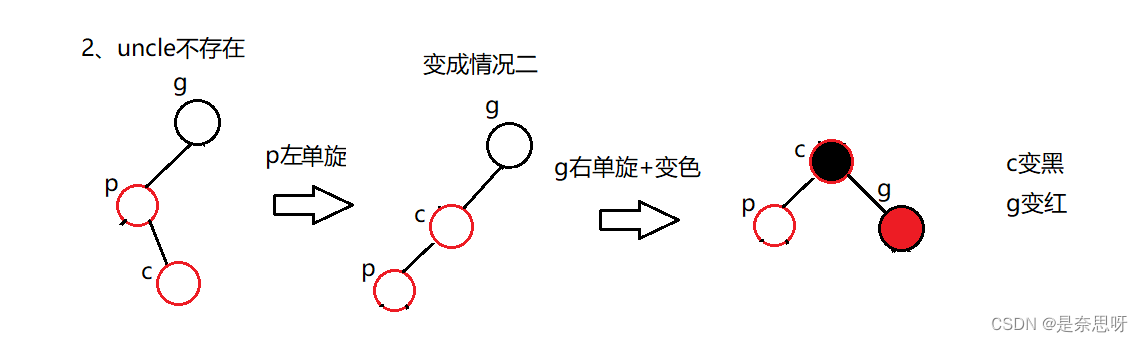
目录 前言 一、红黑树 1、红黑树的基本概念 2、红黑树相关特性 3、红黑树结点的定义 4、红黑树的查找 5、红黑树的插入 6、二叉树的拷贝构造与析构 7、红黑树的检测 8、红黑树总结 二、map与set的封装 1、红黑树的结点 2、红黑树迭代器 3、set的封装 4、map的封…...
逻辑斯特回归
*分类是离散的,回归是连续的 下载数据集 trainTrue:下载训练集 逻辑斯蒂函数保证输出值在0-1之间 能够把实数值映射到0-1之间 导函数类似正态分布 其他饱和函数sigmoid functions 循环神经网络经常使用tanh函数 与线性回归区别 塞戈马无参数&#x…...

OpenCV 算法解析
opencv大坑之BGR opencv对于读进来的图片的通道排列是BGR,而不是主流的RGB!谨记! #opencv读入的矩阵是BGR,如果想转为RGB,可以这么转 img4 cv2.imread(1.jpg) img4 cv2.cvtColor(img4,cv2.COLOR_BGR2RGB) OpenCV 常见…...

springboot创建并配置环境(一) - 创建环境
文章目录 一、介绍二、启动环境Environment的分析三、进入源码四、创建环境1. 如何确定应用类型2. 测试 一、介绍 在springboot的启动流程中,启动环境Environment是可以说是除了应用上下文ApplicationContext之外最重要的一个组件了,而且启动环境为应用…...

2023JAVA 架构师面试 130 题含答案:JVM+spring+ 分布式 + 并发编程》...
此文包含 Java 面试的各个方面,史上最全,苦心整理最全 Java 面试题目整理包括基JVM算法数据库优化算法数据结构分布式并发编程缓存等,使用层面广,知识量大,涉及你的知识盲点。要想在面试者中出类拔萃就要比人付出更多的…...
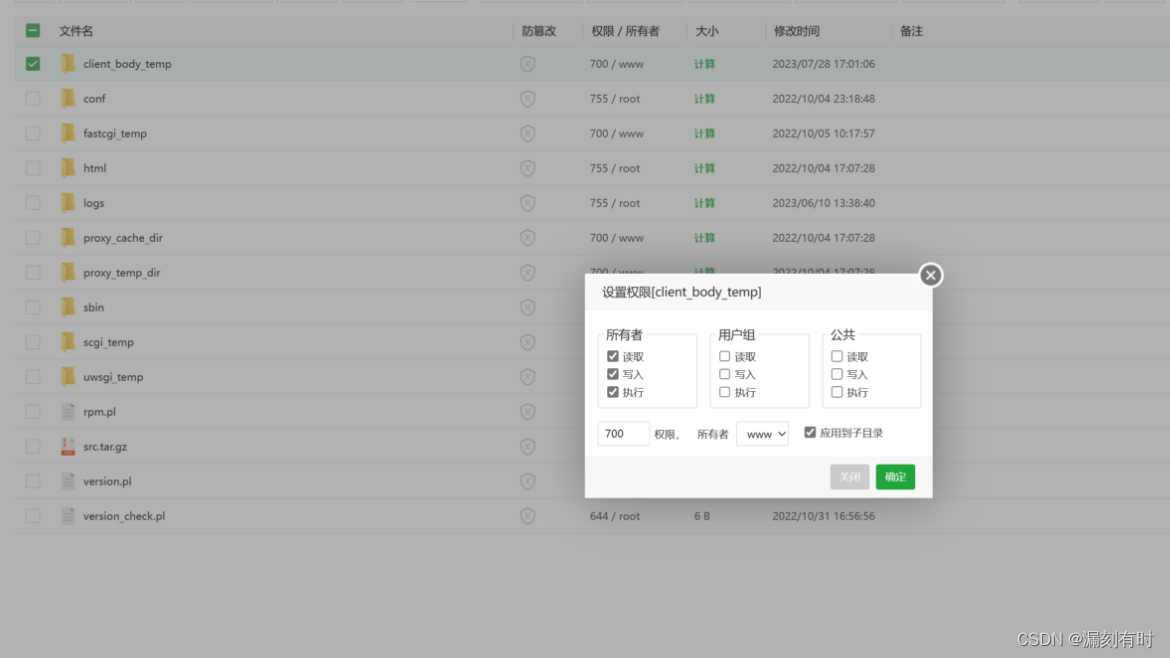
layui手机端上传文件时返回404 Not Found的解决方案(client_body_temp权限设置)
关于 1.client_body_temp的作用 client_body_temp是一个指令指定保存客户端请求体临时文件的目录路径,以及是否进行缓存的配置指令。 在Web服务器中,当客户端向服务器发送请求时,请求体中包含了请求的主体部分,比如表单数据、上…...

网络编程知识
网络编程知识 一.网络七层模型 OSI模型: OSI 模型(Open System Interconnection model)是一个由国际标准化组织􏰁提出的概念模型,试图提供一个使各种不同的计算机和网络在世界范围内实现互联的标准框架。它将计算机网络体系结构划分为七层…...
线性神经网路——线性回归随笔【深度学习】【PyTorch】【d2l】
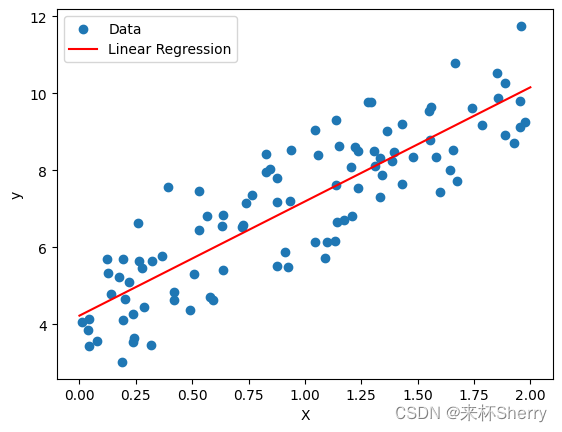
文章目录 3.1、线性回归3.1.1、PyTorch 从零实现线性回归3.1.2、简单实现线性回归 3.1、线性回归 线性回归是显式解,深度学习中绝大多数遇到的都是隐式解。 3.1.1、PyTorch 从零实现线性回归 %matplotlib inline import random import torch #d2l库中的torch模块&a…...

js实现多种按钮
你可以使用JavaScript来实现多种类型的按钮,以下是几个常见的示例: 普通按钮(Normal Button): <button>Click me</button> 带图标的按钮(Button with Icon): <bu…...
)
getopt函数(未更新完)
2023年7月28日,周五上午 这是我目前碰到过的比较复杂的函数之一, 为了彻底弄懂这个函数,我花了几个小时。 为了更好的说明这个函数,之后我可能会录制讲解视频并上传到B站, 如果我上传到B站,我会在文章添…...
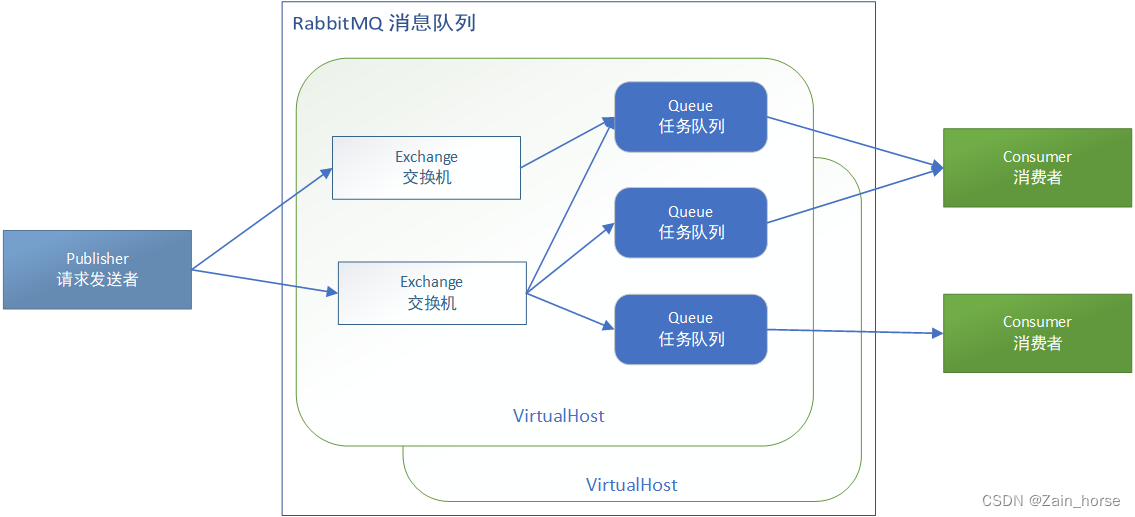
SpringCloud学习路线(9)——服务异步通讯RabbitMQ
一、初见MQ (一)什么是MQ? MQ(MessageQueue),意思是消息队列,也就是事件驱动架构中的Broker。 (二)同步调用 1、概念: 同步调用是指,某一服务…...

postcss-pxtorem适配插件动态配置rootValue(根据文件路径名称,动态改变vue.config里配置的值)
项目背景:一个项目里有两个分辨率的设计稿(1920和2400),不能拆开来打包 参考: 是参考vant插件:移动端Vant组件库rem适配下大小异常的解决方案:https://github.com/youzan/vant/issues/1181 说明: 因为vue.c…...

代码随想录算法训练营第二十三天 | 额外题目系列
额外题目 1365. 有多少小于当前数字的数字借着本题,学习一下各种排序未看解答自己编写的青春版重点代码随想录的代码我的代码(当天晚上理解后自己编写) 941.有效的山脉数组未看解答自己编写的青春版重点代码随想录的代码我的代码(当天晚上理解后自己编写) 1207. 独一…...

UiAutomator
运行Espresso和UI Automator测试时要使用模拟器。国内手机的ROM大多进行过修改,可能加入很多限制,导致测试无法正常运行。 Espresso只支持一个活动内部交互行为的测试。跨越多个活动、多个应用的场景需要使用UI Automator。使用Espresso和UI Automator的…...

stm32标准库开发常用函数的使用和代码说明
文章目录 GPIO(General Purpose Input/Output)NVIC(Nested Vectored Interrupt Controller)DMA(Direct Memory Access)USART(Universal Synchronous/Asynchronous Receiver/Transmitter…...

有关合泰BA45F5260中断的思考
最近看前辈写的代码,发现这样一段代码: #ifdef SUPPORT_RF_NET_FUNCTION if(UART_INT_is_L()) { TmrInsertTimer(eTmrHdlUartRxDelay,TMR_PERIOD(2000),NULL); break; } #endif 其中UART_INT_is_L&am…...

Numpy-算数函数与数学函数
⛳算数函数 如果参与运算的两个对象都是ndarray,并且形状相同,那么会对位彼此之间进 第 30 页 行( - * /)运算。NumPy 算术函数包含简单的加减乘除: add(),subtract(),multiply() 和divide()。 …...

PyTorch 2.8镜像实操手册:Git+vim+htop+screen开发运维一体化工作流
PyTorch 2.8镜像实操手册:Gitvimhtopscreen开发运维一体化工作流 1. 镜像概述与环境准备 PyTorch 2.8深度学习镜像是一个为专业开发者打造的全功能工作环境,基于RTX 4090D 24GB显卡和CUDA 12.4进行了深度优化。这个镜像不仅预装了最新版的PyTorch框架&…...

OpenClaw小龙虾初体验【安装学习】
文章目录一、前言二、安装三、360安全龙虾四、腾讯龙虾4.1 文件移动4.2 应用分析4.3 Docker失败原因一、前言 最近小龙虾很火,不禁能说还能做,本质就类似木马,获取电脑权限,不禁能操作各应用还能联动外接设备。 那肯定要学习一下…...

中小企业如何选择适合自己的SEO软件
了解SEO软件的基本概念 在当今数字化营销时代,中小企业如何选择适合自己的SEO软件是一个至关重要的问题。SEO(搜索引擎优化)软件的核心功能是帮助企业提升在搜索引擎上的排名,从而增加网站的曝光率和流量。但是,市面上…...

精选 Skills 推荐:10 个让 Coding Agent 如虎添翼的Skills + 优质来源分享
精选 Skills 推荐:10 个让 Coding Agent 如虎添翼的Skills 优质来源分享 本篇是 Vibecoding 系列教程 的工具导向专题篇。 前篇:进阶教程(一):MCP Skills 让 coding agent 有自己的工具系列合集:Vibecodi…...

电散热器为何能适配多场景采暖?
一、设备概述:3kW 220V电散热器的核心定位3kW 220V电散热器是一款功率适中、电压适配家用及小型商用场景的便捷采暖设备,凭借无需复杂管道铺设、即开即热的优势,成为现代采暖的热门选择。其额定功率3kW、额定电压220V,适配家庭、办…...

突破限制的完整方案:开源工具免费解锁Cursor Pro功能实战指南
突破限制的完整方案:开源工具免费解锁Cursor Pro功能实战指南 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached y…...

实战指南:基于快马AI生成可部署的、支持多游戏与数据库的账号管理应用
今天想和大家分享一个实战项目:用Python开发一个支持多游戏的账号管理器(俗称"lv上号器")。这个工具特别适合游戏多开玩家,能安全存储不同游戏的账号信息,还能一键登录不同游戏客户端。 项目需求分析 首先明…...

用51单片机定时器做一个多功能秒表:代码详解如何整合数码管、按键与中断
51单片机多功能秒表开发实战:从模块整合到系统思维进阶 在嵌入式开发领域,能够独立完成一个功能完整的综合项目,往往是区分初学者与进阶开发者的关键分水岭。今天,我们将以51单片机为核心,打造一个具有启动/暂停、清零…...

DLSS状态监控完全指南:从问题诊断到性能优化
DLSS状态监控完全指南:从问题诊断到性能优化 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 你是否曾经遇到过这样的困惑:在游戏中开启了DLSS功能,却无法确定它是否真的在工作&#…...

PingFangSC字体专业配置与高效应用实践指南
PingFangSC字体专业配置与高效应用实践指南 【免费下载链接】PingFangSC PingFangSC字体包文件、苹果平方字体文件,包含ttf和woff2格式 项目地址: https://gitcode.com/gh_mirrors/pi/PingFangSC 在数字设计领域,字体选择直接影响用户体验与信息传…...