【视觉SLAM入门】4.3. (非线性最小二乘问题)优化算法实现-ceres和g2o, 图优化理论
"天道不争而善胜"
- 1. Ceres库
- 1.1 名词解释
- 1.2 具体例子
- 1.3 C++实现
- 1. 定义代价函数
- 2. 构建最小二乘问题
- 3. 配置求解器,开始优化
- 4. 优化完毕,查看结果
- 2. G2O(General Graphic Optimization)
- 2.1 图优化
- 2.2 具体例子
- 2.3 C++实现
- 1. 定义顶点
- 2. 定义边
- 3. 配置求解器
- 4. 配置图模型
- 5. 向图添加边
- 6. 执行优化
- 7. 查看
- 3. 总结
注意:有个概念需要通俗的了解一下
-
非线性最小二乘:它属于一种优化问题。即用一个模型来描述现实中的一系列数据时,模型的预测结果与实际的测量结果总会存在一定偏差,这一偏差就称为残差。非线性最小二乘的目的就是,调整模型的参数,使得总的残差最小。
-
优化算法:为获得更好的结果,而采取的方法
1. Ceres库
1.1 名词解释
Ceres求解最小二乘的问题通用形式如下:
min x 1 2 ∑ i ρ i ( ∣ ∣ f i ( x i 1 , . . . , x i n ∣ ∣ 2 ) s . t . l j ≤ x j ≤ u j \min\limits_x \;\frac{1}{2}\sum\limits_i\rho_i\Big(||f_i(x_{i_1},...,x_{i_n}||^2\Big) \\ s.t. \quad l_j \le x_j \le u_j xmin21i∑ρi(∣∣fi(xi1,...,xin∣∣2)s.t.lj≤xj≤uj
- 核函数: ρ ( ⋅ ) \rho(\cdot) ρ(⋅),用于在计算残差时对其进行加权,以减小噪声的影响。暂时取恒等函数
- 优化变量: min \min min 底下的,即 x 1 , . . . , x n x_1,...,x_n x1,...,xn
- 目标函数: 总的大式子,核函数取恒等函数的时候,它是许多项的平方和;
- 代价函数: f i f_i fi, SLAM中的误差项
- 边界: l j l_j lj 和 u j u_j uj 是优化变量的取值范围,分别是下界和上界,暂时取正负无穷
当核函数恒等时,整个问题就是无约束的最小二乘问题。
1.2 具体例子
设待估计曲线为:
y = e x p ( a x 2 + b x + c ) + w w 为误差,满足高斯分布 y = exp(ax^2+bx+c)+w\qquad\qquad w为误差,满足高斯分布 y=exp(ax2+bx+c)+ww为误差,满足高斯分布
我们现在有很多 x i , y i x_i, y_i xi,yi 点,待估计变量为 a , b , c a, b, c a,b,c。
则我们要求解的最小二乘问题为:
min a , b , c 1 2 ∑ i = 1 N ( ∣ ∣ y i − e x p ( a x i 2 + b x i + c ) ∣ ∣ 2 ) \min\limits_{a,b,c} \;\frac{1}{2}\sum\limits_{i=1}^N\Big(||y_i-exp(ax_i^2+bx_i+c)||^2\Big) a,b,cmin21i=1∑N(∣∣yi−exp(axi2+bxi+c)∣∣2)
可以看到 y i y_i yi 和 x i x_i xi 已知,误差就是真实值和待估计曲线的估计值的残差。
1.3 C++实现
按照以下步骤来,基本是个通式(只有关键的几步): 仍然以 1.2 的例子进行
1. 定义代价函数
struct CURVE_FITTING_COST
{CURVE_FITTING_COST(double x, double y) : _x(x), _y(y) {}// 残差的计算template <typename T>bool operator()( // 重载括号运算符const T *const abc, // 模型参数,有3维T *residual) const // 残差{residual[0] = T(_y) - ceres::exp(abc[0] * T(_x) * T(_x) + abc[1] * T(_x) + abc[2]); // y-exp(ax^2+bx+c)return true;}const double _x, _y; // x,y数据
};
- 也就是这么构造cost_function,重要的是残差函数
residual[0]定义在重载小括号中, - 将其封装成这样的结构体后,加入cost_function后,残差函数是优化过程中后台调用的
2. 构建最小二乘问题
ceres::Problem problem;for (int i = 0; i < N; i++){problem.AddResidualBlock( new ceres::AutoDiffCostFunction<CURVE_FITTING_COST, 1, 3>(new CURVE_FITTING_COST(x_data[i], y_data[i])), nullptr, abc );}
- 不同问题,构建的形式也是很固定的,首先创建
problem对象 - 依次向
problem对象中添加误差项。具体的: AddResidualBlock函数的三个参数分别为cost_function类,核函数,待估计参数的地址。不同的是,这里的cost_function类用的是模板类AutoDiffCostFunction,详细解释下这个AutoDiffCostFunctionAutoDiffCostFunction的模板参数为:函数结构体类型CostFunctor,待估计参数块的维度,待估计参数块的数量- 在 Ceres 中,
cost_function结构体的实例必须通过ceres::AutoDiffCostFunction或ceres::NumericDiffCostFunction对象来进行封装,以便 Ceres 能够自动计算其梯度 - Ceres 会自动计算残差函数关于每个参数块的偏导数,从而得到残差函数的梯度。
3. 配置求解器,开始优化
//配置求解器,这里有很多options的选项,自查
ceres::Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR; //增量方程如何求解,QR分解的方法
options.minimizer_progress_to_stdout = true; //输出到命令行ceres::Solver::Summary summary; // 优化信息
ceres::Solve(options, &problem, &summary); // 开始优化
- options求解器配置还有很多选项,自行了解
- 将其输出到命令行,保存迭代信息
4. 优化完毕,查看结果
cout << summary.BriefReport() << endl;cout << "estimated a,b,c = ";for (auto i : abc)cout << i << " ";cout << endl;
- summary中包含迭代次数,误差等信息
- 迭代完成后,数值会保存在待优化变量中,查看即可
2. G2O(General Graphic Optimization)
2.1 图优化
直观的观察到优化问题的样貌。
- 顶点(Vertex): 优化变量
- 边(Edge): 误差项
一个简单的图的例子:
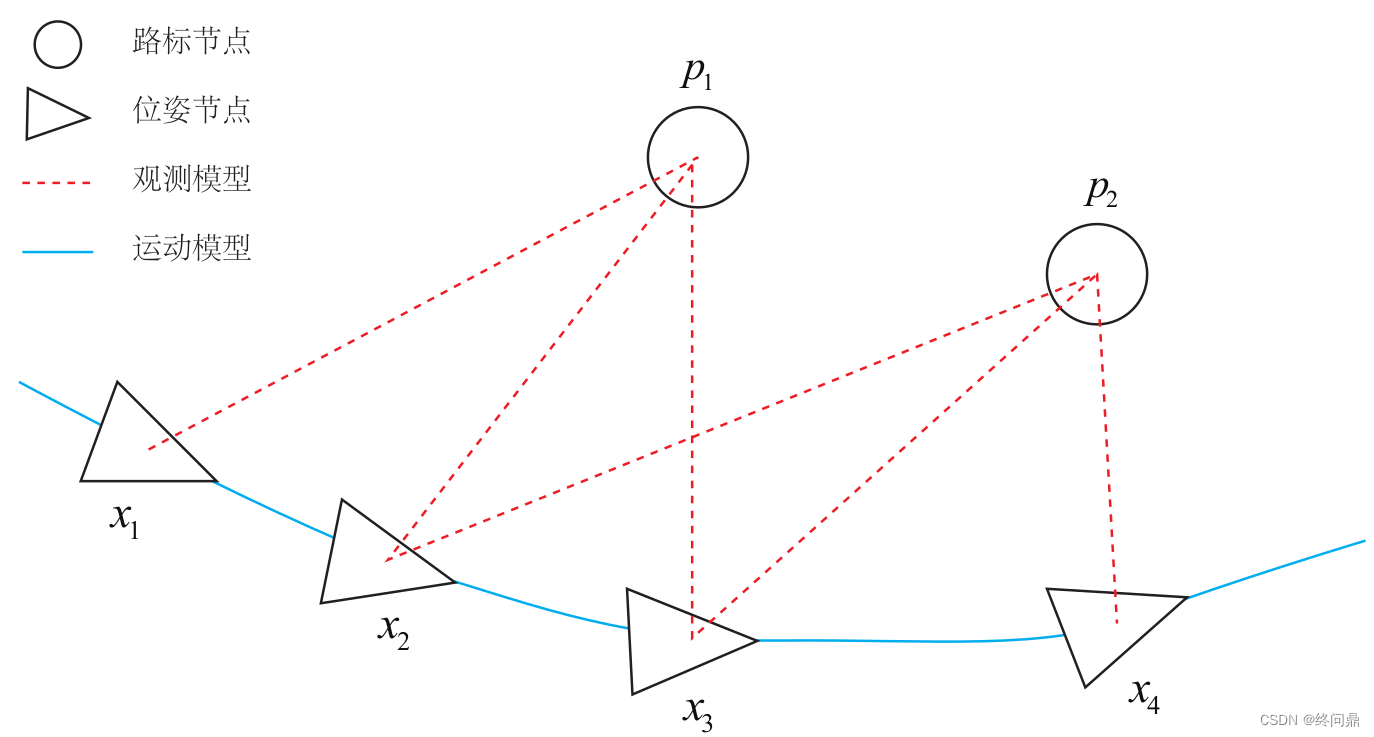
图优化的边:
- 蓝色线相机运动模型
- 红色虚线观测模型
2.2 具体例子
我们要求解的最小二乘问题为:
min a , b , c 1 2 ∑ i = 1 N ( ∣ ∣ y i − e x p ( a x i 2 + b x i + c ) ∣ ∣ 2 ) \min\limits_{a,b,c} \;\frac{1}{2}\sum\limits_{i=1}^N\Big(||y_i-exp(ax_i^2+bx_i+c)||^2\Big) a,b,cmin21i=1∑N(∣∣yi−exp(axi2+bxi+c)∣∣2)
我们的问题是曲线拟合问题,需要把它抽象成图优化的图。原则:节点为优化变量,边为误差项。则,不难将图优化为如下的样子:
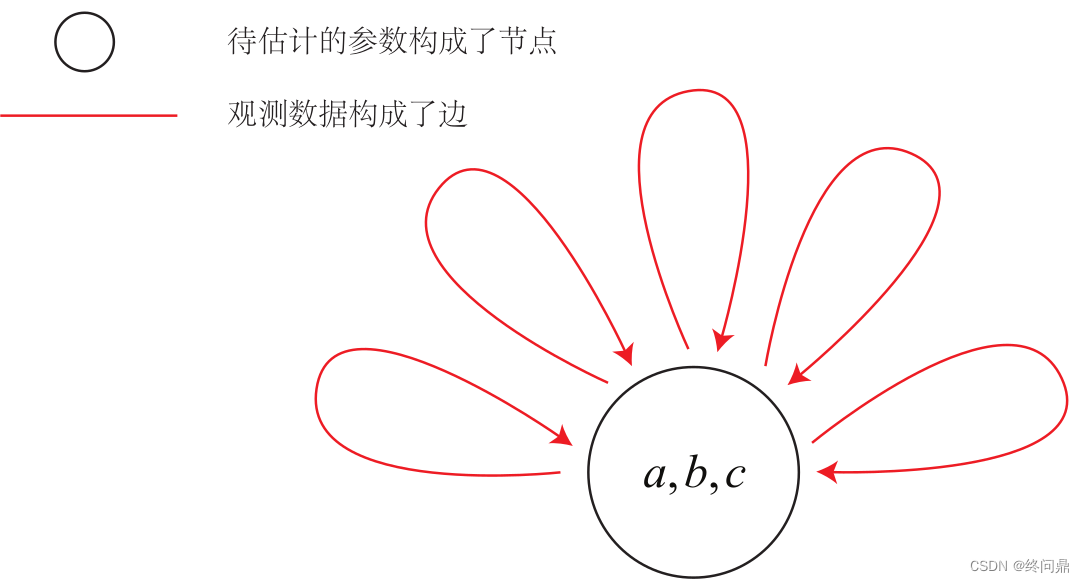
- 整个问题只有一个顶点:曲线模型参数 a , b , c a, b, c a,b,c
- 都是一元边: 每个数据点构成了一个个误差项
2.3 C++实现
按照以下步骤来,基本是个通式(只有关键的几步): 仍然以 2.2 的例子进行
1. 定义顶点
class CurveFittingVertex: public g2o::BaseVertex<3, Eigen::Vector3d>
{
public:EIGEN_MAKE_ALIGNED_OPERATOR_NEWvirtual void setToOriginImpl() // 重置{_estimate << 0,0,0;}virtual void oplusImpl( const double* update) // 更新{_estimate += Eigen::Vector3d(update);}
};
EIGEN_MAKE_ALIGNED_OPERATOR_NEW的加入是解决字节对其问题,具体看Eigen字节对其- 第一个函数是第一次给初始值
- 第二个函数是以后更新的过程
- 该函数是顶点基函数的共有继承类,
<3, Eigen::Vector3d>模板中给出了<优化变量维度, 数据类型> oplusImpl函数很重要,是增量 Δ x \Delta x Δx的计算,即 x k + 1 = x k + Δ x x_{k+1} = x_k + \Delta x xk+1=xk+Δx 的过程
2. 定义边
class CurveFittingEdge: public g2o::BaseUnaryEdge<1,double,CurveFittingVertex>
{
public:EIGEN_MAKE_ALIGNED_OPERATOR_NEW
1. CurveFittingEdge( double x ): BaseUnaryEdge(), _x(x) {}// 计算曲线模型误差void computeError(){
2. const CurveFittingVertex* v = static_cast<const CurveFittingVertex*> (_vertices[0]);
3. const Eigen::Vector3d abc = v->estimate();
4. _error(0,0) = _measurement - std::exp( abc(0,0)*_x*_x + abc(1,0)*_x + abc(2,0) ) ; }virtual bool read( istream& in ) {}virtual bool write( ostream& out ) const {}
public:double _x;
};
class CurveFittingEdge: public g2o::BaseUnaryEdge<1,double,CurveFittingVertex>是基类一元边的共有继承,模板<1,double,CurveFittingVertex>中的内容分别是观测值维度,观测值类型,该边要连接的顶点类型(也就是上边1.中定义的)2.代码static_cast是强制类型转换符,将顶点转成我们自定义支持的类型3.代码表示提取当前值,estimate()就是查看现在V中的值4.代码就是误差,由于我们只有一个顶点,所以过程略微简单些
3. 配置求解器
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block;
- BlockSolver类模板的使用了3X3的稠密矩阵块储存海森矩阵,每个块的大小为1X1的求解器
- 每个误差项优化变量维度(顶点参数数量)为3,误差值维度为1
std::unique_ptr<Block::LinearSolverType> linearSolver ( new g2o::LinearSolverDense<Block::PoseMatrixType>());
- 线性方程求解器
LinearSolverType是线性求解器的类型:用于指定解线性方程的算法。 - 用
new创建LinearSolverDense实例,是G2O库中用于求解稠密矩阵的线性求解器,PoseMatrixType指定了矩阵块的类型,也就是上边BlockSolverTraits中的类型 - 最后
linearSolver现在是一个std::unique_ptr(Block::LinearSolverType)对象,它有一个LinearSolverDense类的实例 LinearSolverDense是LinearSolverType类的一种实现
std::unique_ptr<Block> solver_ptr (new Block ( std::move(linearSolver)));// 梯度下降方法,从GN, LM, DogLeg 中选
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg ( std::move(solver_ptr));
- 还可以用其他方法,如下两句替换上边的也可以
g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton( std::move(solver_ptr));
g2o::OptimizationAlgorithmDogleg* solver = new g2o::OptimizationAlgorithmDogleg( std::move(solver_ptr));
4. 配置图模型
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 设置求解器
optimizer.setVerbose( true ); // 打开调试输出
// 往图中增加顶点
CurveFittingVertex* v = new CurveFittingVertex();
//设置位姿估计值,V一个位姿估计器(pose estimater),这里是0初始位姿
v->setEstimate( Eigen::Vector3d(0,0,0) );
//区分不同的位姿估计器,一个估计器一个id
v->setId(0);optimizer.addVertex(v);
- 除最后一句,其他的都是将顶点按照图要求的配置
- 最后一句将
v加入图中,告诉优化器应该优化该机器人的pose
5. 向图添加边
for ( int i=0; i<N; i++ ){
1. CurveFittingEdge* edge = new CurveFittingEdge(x_data[i]); //残差做边
2. edge->setId(i); // 该残差边的id
3. edge->setVertex(0, v); // 设置连接的顶点,v就是顶点,就是要优化的系数a,b,c,通过优化器估计顶点值
4. edge->setMeasurement(y_data[i]); // 观测数值y,也许是为了弥补构造函数中计算代价函数时候没有y(_measurement)的原因
5. edge->setInformation(Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma)); // 信息矩阵,也就是边的权重:协方差矩阵之逆,也就是高斯分布最大似然里边的那个
6. optimizer.addEdge(edge);}
1.残差做边2.设置该残差边的id3.设置连接的顶点v,即包含a,b,c的4.向边加入观测值/真实值 y(_measurement)5.设置该边的权重,也称信息矩阵6.边配置完毕,将该边加入图中。其实这个配置点和边,最后一步加入途中的步骤很像。
6. 执行优化
1. optimizer.initializeOptimization(); //对图模型初始化
2. optimizer.optimize(100); //最大迭代次数,每次迭代会更新顶点
1.初始化图模型,为顶点和边分配内存空间2.对图模型进行优化,设置最大迭代次数为100.每次迭代都会更新图模型中的顶点
7. 查看
Eigen::Vector3d abc_estimate = v->estimate();
cout<<"estimated model: "<<abc_estimate.transpose()<<endl;
3. 总结
- 实际上G2O并不是用来做曲线拟合的,在SLAM中带有多个相机位姿和空间点较为复杂,在G2O中有很好的定义,而CERES中需要自己实现
Cost function - 基本处理这种东西,该库是通式,多看两遍就熟悉了
- 在G2O的顶点定义中有 Δ x \Delta x Δx 的计算,但是在SLAM中,它不仅仅是数值的加法,要用到李群李代数的左乘或者右乘更新了。
本节主要介绍了非线性优化问题:许多个误差项平方组成的最小二乘问题。(SLAM中较为常见)
相关文章:
【视觉SLAM入门】4.3. (非线性最小二乘问题)优化算法实现-ceres和g2o, 图优化理论
"天道不争而善胜" 1. Ceres库1.1 名词解释1.2 具体例子1.3 C实现1. 定义代价函数2. 构建最小二乘问题3. 配置求解器,开始优化4. 优化完毕,查看结果 2. G2O(General Graphic Optimization)2.1 图优化2.2 具体例子2.3 C实现1. 定义顶点2. 定义边…...

vue Can‘t resolve ‘path‘
BREAKING CHANGE: webpack < 5 used to include polyfills for node.js core modules by default. This is no longer the case. Verify if you need this module and configure a polyfill for it. 这句话的意思是webpack 5之前是自动导入node一些核心模块的垫片…...

【JavaEE初阶】——第七节.Servlet入门学习笔记
作者简介:大家好,我是未央; 博客首页:未央.303 系列专栏:JavaEE进阶 每日一句:人的一生,可以有所作为的时机只有一次,那就是现在!!! 文章目录 前…...
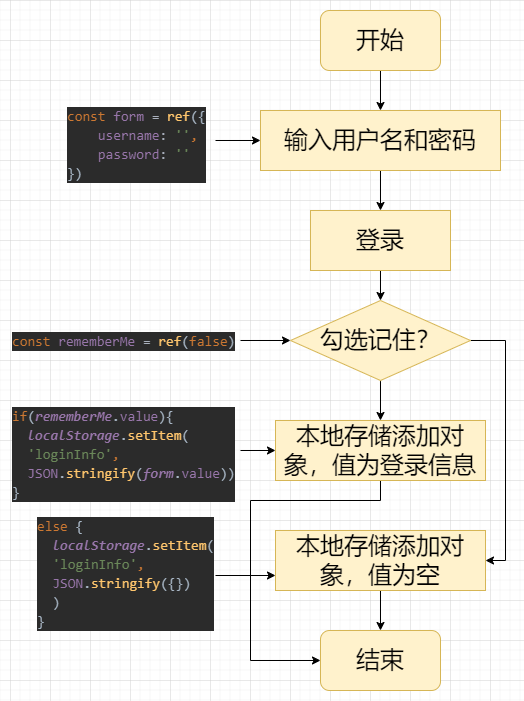
vue项目登录页面实现记住用户名和密码
vue项目登录页面实现记住用户名和密码 记录一下实现的逻辑,应该分两步来理解这个逻辑 首次登录,页面没有用户的登录信息,实现逻辑如下: 用户输入用户名和密码登录,用户信息为名为form的响应式对象,v-model…...
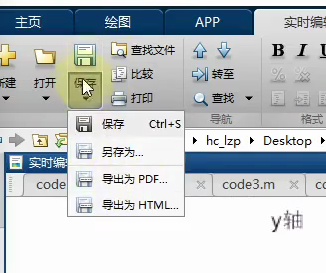
数学建模-MATLAB三维作图
导出图片用无压缩tif会更清晰 帮助文档:doc 函数名 matlab代码导出为PDF 新建实时脚本或右键文件转换为实时脚本实时编辑器-全部运行-内嵌显示保存为PDF...

pytorch工具——使用pytorch构建一个神经网络
目录 构建模型模型中的可训练参数假设输入尺寸为32*32损失函数反向传播更新网络参数 构建模型 import torch import torch.nn as nn import torch.nn.functional as Fclass Net(nn.Module):def __init__(self):super(Net,self).__init__()#定义第一层卷积层,输入维…...
)
在CSDN学Golang云原生(Kubernetes Pod)
一,pod的定义与基本用法 在 Kubernetes 中,Pod 是最小的可部署单元,它包含一个或多个容器。使用 Golang 来定义和操作 Pod 时,需要使用 kubernetes/client-go 包提供的 API。 以下是 Golang 定义和基本用法 Pod 的示例ÿ…...

我开源了团队内部基于SpringBoot Web快速开发的API脚手架v1.7.0更新
什么是 rest-api-spring-boot-starter rest-api-spring-boot-starter 适用于SpringBoot Web API 快速构建让开发人员快速构建统一规范的业务RestFull API 不在去关心一些繁琐。重复工作,而是把重点聚焦到业务。 动机 每次Web API常用功能都需要重新写一遍。或者复…...
excel要如何自动累加某个单元格上方的所有单元格?
输入公式 SUM(INDIRECT("A1:A"&ROW()-1)) 运行实例如下图 注意图中b4,和b5单元格都输入相同的公式。 此方法可以避免写vba,以前此类问题的解决都是通过vba代码进行处理 对函数进行解析 主要使用了 INDIRECT() 2、公式说明:…...

广州道可维斯受邀参加首届金蝶暨佛山数字化生态峰会
2023首届金蝶暨佛山数字化生态峰会,于7月28日在佛山隆重举行。此次大会由金蝶软件集团主办,共有超150家软件行业企业莅临参与,共同探讨数字化行业的最新动态和趋势。 活动当日,道可维斯的客户成功中心主任梁健,做了以“企业内容管…...

ubuntu远程控制小车 运行rviz时报错
我买的是wheeltec的小车,测试rgbd相机时想在ubuntu上的rviz中显示小车的姿态和看到的rgb和depth图,但是ubuntu中rostopic list和rviz都找不到小车发布的话题信息,运行rqt_image_view时可以显示图片信息。 最终wheeltec的技术人员lucas帮我找了…...

轻松实现自定义数据脱敏返回
学习目标: 实现简单的数据脱敏功能 例如: 学习自定义数据脱敏 学习内容: 使用到:泛型、反射 /*** * param obj 需要数据脱敏的对象* param par 那些字段需要脱敏* param <T>* return* throws Exception*/public static …...
函数)
pytorch 中_call_impl()函数
记录pytorch 版本中的 nn.Module() 重要函数 1. _call_impl() 1.1 torch1.7.1 版本 def _call_impl(self, *input, **kwargs):for hook in itertools.chain(_global_forward_pre_hooks.values(),self._forward_pre_hooks.values()):result hook(self, input)if result is n…...

openGauss学习笔记-22 openGauss 简单数据管理-HAVING子句
文章目录 openGauss学习笔记-22 openGauss 简单数据管理-HAVING子句22.1 语法格式22.2 参数说明22.3 示例 openGauss学习笔记-22 openGauss 简单数据管理-HAVING子句 HAVING子句可以让我们筛选分组后的各组数据。 WHERE子句在所选列上设置条件,而HAVING子句则在由…...
干货 | 常见电路板GND与外壳GND之间接一个电阻一个电容,为什么?
干货 | 常见电路板GND与外壳GND之间接一个电阻一个电容,为什么? 外壳是金属的,中间是一个螺丝孔,也就是跟大地连接起来了。这里通过一个1M的电阻跟一个0.1uF的电容并联,跟电路板的地连接在一起,这样有什么好…...

网络层协议总览
网络层协议总览 IPARP(地址解析协议)ICMP(网际控制报文协议)路由选择协议NAT(网络地址转换协议) 网络层的主要协议包括IP、ARP、RARP、ICMP、IGMP以及各种路由选择协议等。 IP IP协议是TCP/IP协议簇中的核…...

C++模拟实现list
1.首先要了解到vs底层的list链表是带头双向循环的链表。 所以首先就要看成员变量 那么就说明我们还需要构造一个Node的结构体,(typedef一下就好了,名字不影响) 现在就可以完成间的push_back函数了。 1.list的iterator 我们之前模…...

PostgreSQL PG16 逻辑复制在STANDBY 上工作 (译)
开头还是介绍一下群,如果感兴趣polardb ,mongodb ,mysql ,postgresql ,redis 等有问题,有需求都可以加群群内有各大数据库行业大咖,CTO,可以解决你的问题。加群请联系 liuaustin3 ,在新加的朋友会分到2群(共…...

《零基础入门学习Python》第058讲:论一只爬虫的自我修养6:正则表达式2
上一节课我们通过一个例子(匹配 ip 地址)让大家初步了解到正则表达式的魔力,也让大家充分了解到学习正则表达式是一个相对比较困难的事情。所以这一节课我们将继续学习 正则表达式的语法。 我们依稀还记得在Python中,正则表达式是…...
第一堂棒球课:MLB棒球大联盟的主要战术·棒球1号位
MLB棒球大联盟的主要战术 攻击战术run-and-foul(跑垒战术):以速度为优势,在适当的时机发动进攻,争取在一回合内完成得分。 grounder(阻截战术):队员在垒包之间阻止对手的跑垒和传球。…...

Z-Image-Turbo-rinaiqiao-huiyewunv实战落地:高校动漫社AI辅助创作工作流搭建
Z-Image-Turbo-rinaiqiao-huiyewunv实战落地:高校动漫社AI辅助创作工作流搭建 1. 项目背景与核心价值 高校动漫社团经常面临创作效率低、人手不足的问题。传统手绘方式需要大量时间,而通用AI绘图工具又难以保持角色一致性。Z-Image Turbo (辉夜大小姐-…...

保姆级教程:在Ubuntu 24.04上用QEMU桥接网络,让虚拟机秒连外网
在Ubuntu 24.04上实现QEMU虚拟机与宿主机网络互通的终极指南 对于需要在本地环境测试国产操作系统或运行隔离开发环境的开发者来说,QEMU虚拟化方案因其轻量高效而备受青睐。但让虚拟机与宿主机网络互通往往成为新手的第一道门槛。本文将彻底解决这个问题——通过桥接…...
)
VisualGDB跨平台调试避坑指南:用VS远程调试Linux程序(2023最新版配置)
VisualGDB跨平台调试实战:2023年VS远程开发Linux程序避坑指南 当Visual Studio开发者首次尝试在Linux环境下进行C开发时,往往会面临调试工具链断裂的困境。传统的gdb命令行调试方式与Windows开发者熟悉的图形化调试体验存在巨大鸿沟,而Visual…...

800元打造你的第一个自平衡机器人:Cubli Mini终极搭建指南
800元打造你的第一个自平衡机器人:Cubli Mini终极搭建指南 【免费下载链接】Cubli_Mini 项目地址: https://gitcode.com/gh_mirrors/cu/Cubli_Mini 想要亲手制作一个炫酷的自平衡机器人,但又担心成本太高、技术太难?Cubli Mini正是为…...

TP-Link Linux驱动开发面试全记录与实战技巧
1. TP-Link软件工程师面试全记录:Linux驱动开发方向作为一名在嵌入式Linux领域摸爬滚打多年的工程师,最近参加了TP-Link的软件工程师面试,岗位方向是Linux驱动开发。说实话,去之前我对TP-Link的认知还停留在"路由器方案商&qu…...

用ZYNQ PS-SPI给Flash测个速:华邦W25Q80在25MHz时钟下的真实读写性能报告
ZYNQ PS-SPI Flash性能深度评测:华邦W25Q80在25MHz时钟下的极限挖掘 当我们需要在嵌入式系统中选择一款Flash存储器时,数据手册上的理论参数往往无法反映真实应用场景下的性能表现。本文将基于Xilinx ZYNQ平台的PS-SPI接口,对华邦W25Q80 Flas…...

智能化时代的数据集成技术革新
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...

教育资源解析工具:打通国家中小学智慧教育平台电子课本获取通道
教育资源解析工具:打通国家中小学智慧教育平台电子课本获取通道 【免费下载链接】tchMaterial-parser 国家中小学智慧教育平台 电子课本下载工具,帮助您从智慧教育平台中获取电子课本的 PDF 文件网址并进行下载,让您更方便地获取课本内容。 …...

Qwen3.5-9B Java面试宝典生成器:动态定制八股文与场景题
Qwen3.5-9B Java面试宝典生成器:动态定制八股文与场景题 1. 为什么需要智能面试助手 Java开发者求职路上,最头疼的莫过于海量面试题的整理和记忆。传统方式要么依赖网上零散的八股文合集,要么自己手动整理知识点,效率低下且难以…...

幻兽帕鲁存档迁移完全手册:告别数据丢失的终极解决方案
幻兽帕鲁存档迁移完全手册:告别数据丢失的终极解决方案 【免费下载链接】palworld-host-save-fix 项目地址: https://gitcode.com/gh_mirrors/pa/palworld-host-save-fix 你是否曾在更换幻兽帕鲁服务器时,眼睁睁看着自己辛苦培养的角色数据消失无…...