论文解读|PF-Net:用于 3D 点云补全的点分形网络
原创 | 文 BFT机器人

01
背景
从激光雷达等设备中获取的点云往往有所缺失(反光、遮挡等),这给点云的后续处理带来了一定的困难,也凸显出点云补全作为点云预处理方法的重要性。
点云补全(Point Cloud Completion)用于修补有所缺失的点云(Point Cloud),从缺失点云出发估计完整点云,从而获得更高质量的点云。点云有助于用较小的数据量描述三维物体,在三维物体的检测识别领域应用广泛。
02
相关工作
传统的点云补全方法基于一定的物体基础结构的先验信息,如对称性信息或语义类信息等,通过一定的先验信息对缺失点云进行修补。这类方法只能处理一些点云缺失率很低、结构特征十分明显的缺失点云。
在 PointNet 和 PointNet++ 使用深度学习网络实现了点云分割和点云分类之后,点云深度学习逐渐成为热门研究领域。
如 LGAN-AE,PCN, 和 3D-Capsule 等,这些工作以不完整点云作为输入,输出完整点云,造成网络过于关注到物体的整体特征而忽略了缺失区域的几何信息。
另一方面,这些网络会生成偏向于某类物体共性特征的点云,而失去某个物体的个体特征。(这些工作更注重于学习属性或者类别的一般特征,而不是学习某一特定对象的局部细节)容易改变原有物体的特性(位置错误、几何特征丢失、形状扭曲等)。
03
简介
文章提出一种基于深度学习的点云分形网络PF-Net。PF-Net采用了一些自己的思路和方法来改善现有的问题:
1.以不完整点云作为输入,仅输出缺失部分点云,可保留物体点云的空间结构,对物体的局部特性感知更好;
2.提出了更优的点云特征提取器:多分辨率编码器(Multi-Resolution Encoder),多尺度的方法提升了高低层次点云语义信息提取的效率;
3.提出了点云金字塔解码器(Point Pyramid Decoder)用于生成点云,利用多阶段补全损失加粗样式 (Multi-stage completion loss) 监督其中关键点云的生成,从而减少了几何结构瑕疵。
4.利用 GAN*结构的鉴别器(Descriminator)优化网络,改善了同一类别不同物体间的特征会相互影响的现象(Genus-wise Distortions Problem)。
04
PF-Net网络结构
4.1 MRE(多分辨率编码器)
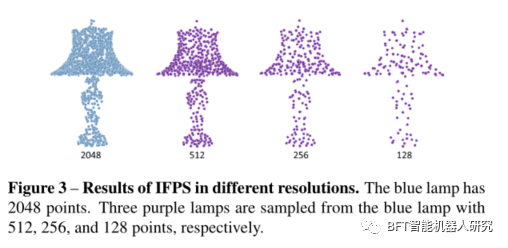
对输入点云做迭代最远点采样(FPS),获得更小尺度且更具有轮廓特征的降采样点云,如图所示。
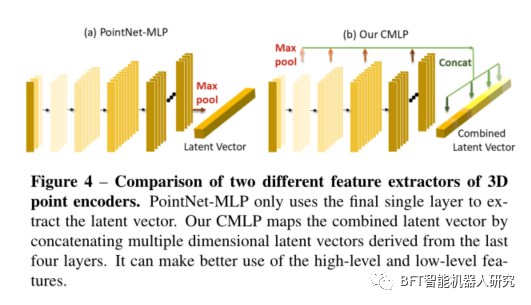
MLP(CMLP)主要采用MPL(多层感知机)的处理方式。不同的是,分别对最后四层网络(output_dim=128,256,512,1024)的输出做maxpooling。
再将这四层pooling后的输出拼接(concat)形成Latent Vector F (dim=1920x1),如图4。该方式能更充分的利用高层和底层特征。
拼接三个不同尺度点云的CMLP输出,获得Final Latent Map M(dim=1920x3)将M通过多层感知机MLP从(1920x3)变换成(1920x1),获得Final Feature Vector V。
4.2 PPD(点云金字塔解码器)
PPD 的主要思想是监督每一阶段的点云,提升关键点的生成质量,在关键点的基础上不断生成新的点云。
借鉴图像处理中经典的SIFT算法,采用特征金字塔加粗样式的方式,对编码出的特征,进行多尺度的解码,生成不同尺度的点云。
现有方法大都利用最后一个输出层的结果来做预测,导致只保留了全局特征而丢失了局部特征。为了更好地保留细节,网络中设计多层的特征解码,使不同粒度的特征更好地保留。
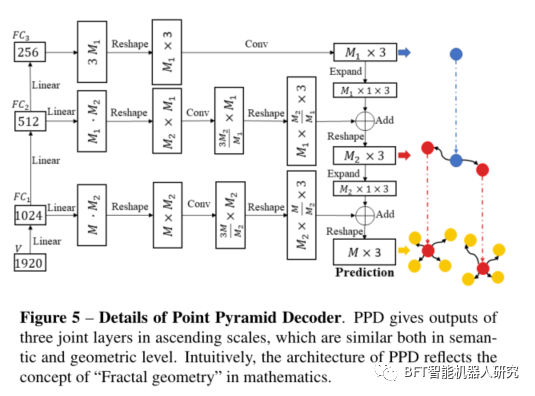
将上一步获得的Final Feature Vector V通过三个FC(全连接)层,产生三个不同尺度的点云特征。
以此为例,经过一系列操作(linear, reshape, convolution)生成与采样后的Ground Truth点云数相同的生成点云,用于后续Loss部分的构建。
4.3 损失函数(包含GAN鉴别器)
损失函数由两部分组成:Multi-stage Completion Loss 和 Adversarial Loss
![]()
1.Multi-stage Completion Loss(Lcom):
该损失衡量输出点云与真值之间的差别。
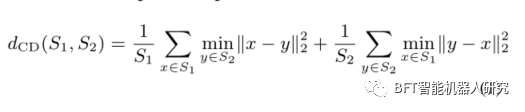

引入计算两个点云间的距离公式(公式1)其中,S1可以表示生成的点云,S2可以表示Ground Truth,对于S1中的每个点,找到其与S2中距离最近的点,计算欧氏距离后求和取平均,作为距离公式的第一部分;第二部分相似,对于S2中的每个点,找到其与S1中距离 最近的点,计算欧氏距离后求和取平均。
在PDD解码器中,生成了三个不同尺度的点云,将三个对应的值取不同权重相加,作为总体损失的一部分(公式2)
2.Adversarial Loss(Ladv):
该损失优化MRE和PPD,使输出看起来更加真实。
GAN鉴别器:GAN鉴别器是一个分类器,其结构与CMLP类似:对一个多层MLP[64−64−128−256]的最后三层的输出进行maxpool得到feature vector f_i, i= 1, 2, 3.将f_i连接得到F,F通过全连接层 [256,128,16,1]以及Sigmoid函数得带最终的预测值。
假设GAN 鉴别器的输出为D(), 其输入为残缺部分点云的预测值y’或对应真值y。
3.Joint Loss
将以上两部分的Loss以不同权重相加,获得完整的Loss Function。
![]()
05
实验分析
实验结果显示PF-Net大部分对比中都是占优的,达到了 SOTA:
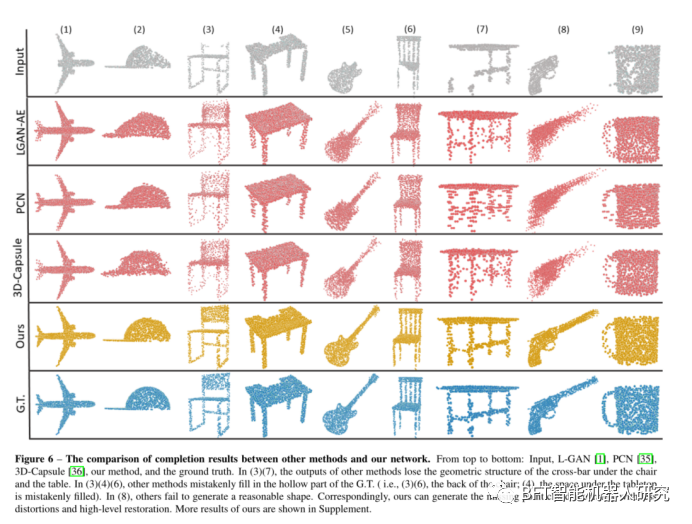
可以看出PF-Net细腻地输出与GroudTruth最接近。
从上图的桌子、椅子中可以看出,PF-Net 没有学习桌子椅子这些类别的一般(共性)特征,可以输出个体差异,比如特殊的缺角的桌子和背靠5根的椅子。
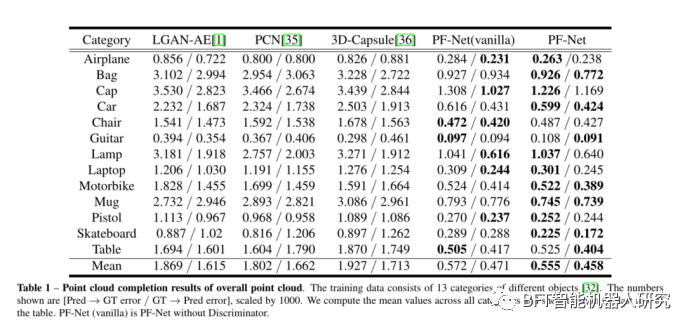
1.Pred→GT error误差用于衡量预测与真实情况之间的差异。
2.GT→Pred error表示真值表面被预测的点云覆盖的程度。
3.PF-Net(vanilla)是指没有GAN鉴别器模块的版本。
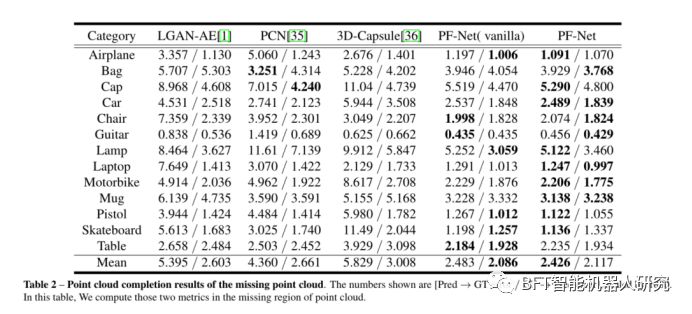
对GAN鉴别器(Discriminator)的分析:
鉴别器的功能是区分预测形状与缺失区域的真实轮廓,并优化网络以生成更“真实”的配置。上图两个表明,Discriminator可以帮助最小化Pred→GT error。如上所述,Pred→GT衡量的是预测与实际情况之间的差异。因此,Discriminator使PF-Net生成与地面实况更相似的点云。
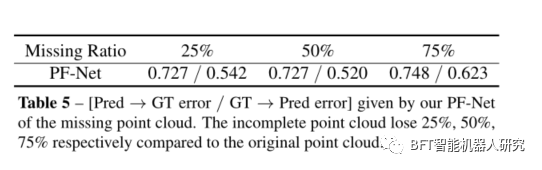
鲁棒性测试:
作者以三个分别损失了25%,50%和75%的不完整点云作为输入。注意,三个输入的Pred→GT误差和GT→Pred误差基本上是相同的,这意味着当处理具有不同缺失程度的不完整输入时,我们的网络具有很强的鲁棒性。实验结果如表所示。
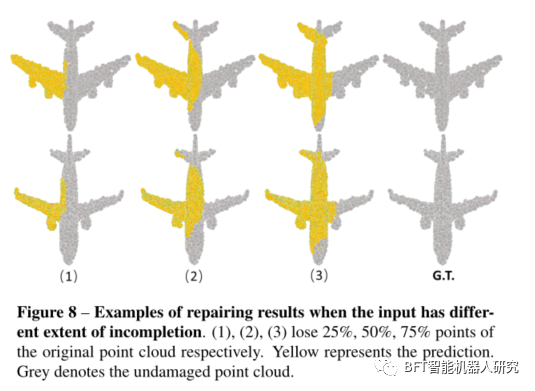
实验证明PF-Net可以准确地“识别”不同类型的飞机,即使在大规模不完整的情况下,也可以保留原始点云的几何细节。
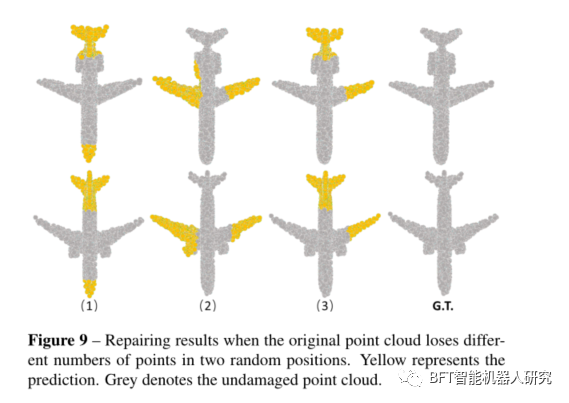
注意第二个两个机翼都缺失的情况下仍然可以补全。
作者 | 江诚
排版 | 居居手
更多精彩内容请关注公众号:BFT机器人
(公众号后台回复“优惠活动”查看BFT机器人年终钜惠福利内容)
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。
相关文章:
论文解读|PF-Net:用于 3D 点云补全的点分形网络
原创 | 文 BFT机器人 01 背景 从激光雷达等设备中获取的点云往往有所缺失(反光、遮挡等),这给点云的后续处理带来了一定的困难,也凸显出点云补全作为点云预处理方法的重要性。 点云补全(Point Cloud Completion&#x…...
网络安全(零基础)自学
一、网络安全基础知识 1.计算机基础知识 了解了计算机的硬件、软件、操作系统和网络结构等基础知识,可以帮助您更好地理解网络安全的概念和技术。 2.网络基础知识 了解了网络的结构、协议、服务和安全问题,可以帮助您更好地解决网络安全的原理和技术…...

Spring Security 身份验证的基本类/架构
目录 1、SecurityContextHolder 核心类 2、SecurityContext 接口 3、Authentication 用户认证信息接口 4、GrantedAuthority 拥有权限接口 5、AuthenticationManager 身份认证管理器接口 6、ProviderManager 身份认证管理器的实现 7、AuthenticationProvider 特定类型的…...
市值超300亿美金,SaaS独角兽Veeva如何讲好中国故事?
“全球前50的药企,有47家正在使用Veeva。” 提到Veeva Systems(以下简称“Veeva”),可能很多人并不熟悉。但是生命科学业内人士都知道,Veeva是全球头部的行业SaaS服务商。以“为生命科学行业构建行业云”为使命&#x…...

编译内联导致内存泄漏的问题定位修复
作者:0x264 问题 线上长时间存在一个跟异步 inflate 相关的量级较大的内存泄漏,如下所示: 第一次分析 从内存泄漏粗略看有几个信息: 被泄漏的Activity有很多,所以可能跟某个具体业务的关系不大引用链特别短…...

基于WebSocket实现的后台服务
基于WebSocket实现的后台服务,用于接收客户端的心跳消息,并根据心跳消息来维护客户端连接。 具体实现中,服务启动后会创建一个HttpListener对象,用于监听客户端的WebSocket连接请求。当客户端连接成功后,服务会为每个…...
Go语言中的结构体详解
关于 Golang 结构体 Golang 中没有“类”的概念,Golang 中的结构体和其他语言中的类有点相似。和其他面向对 象语言中的类相比,Golang 中的结构体具有更高的扩展性和灵活性。 Golang 中的基础数据类型可以表示一些事物的基本属性,但是当我们…...
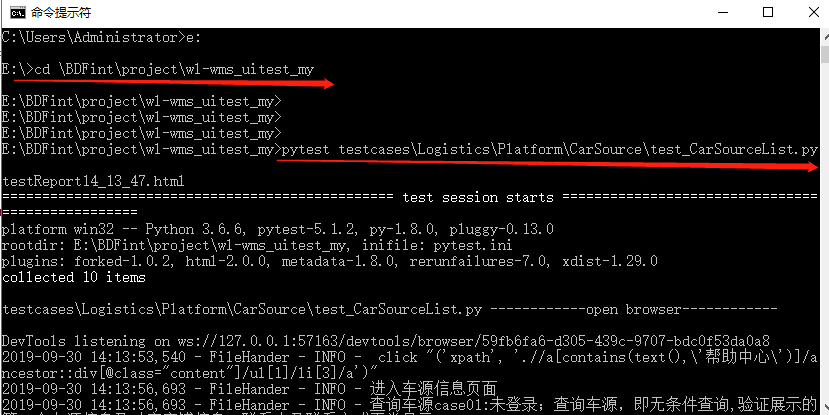
pytest自动化测试指定执行测试用例
1、在控制台执行 打开cmd,进入项目目录 指定执行某个模块 pytest testcases\Logistics\Platform\CarSource\test_CarSourceList.py 指定执行某个目录及其子目录的所有测试文件 pytest testcases\Logistics\Platform\CarSource 指定执行某个模块的某个类的某个测试用例 pyte…...

英伟达 H100 vs. 苹果M2,大模型训练,哪款性价比更高?
M1芯片 | Uitra | AMD | A100 M2芯片 | ARM | A800 | H100 关键词:M2芯片;Ultra;M1芯片;UltraFusion;ULTRAMAN;RTX4090、A800;A100;H100;LLAMA、LM、AIGC、CHATGLM、LLVM、LLM、LLM…...

var、let和const的区别
先简单了解一下 var声明的变量会挂载在window上,而let和const声明的变量不会: var a 100; console.log(a,window.a); // 100 100let b 10; console.log(b,window.b); // 10 undefinedconst c 1; console.log(c,window.c); // 1 undefined v…...
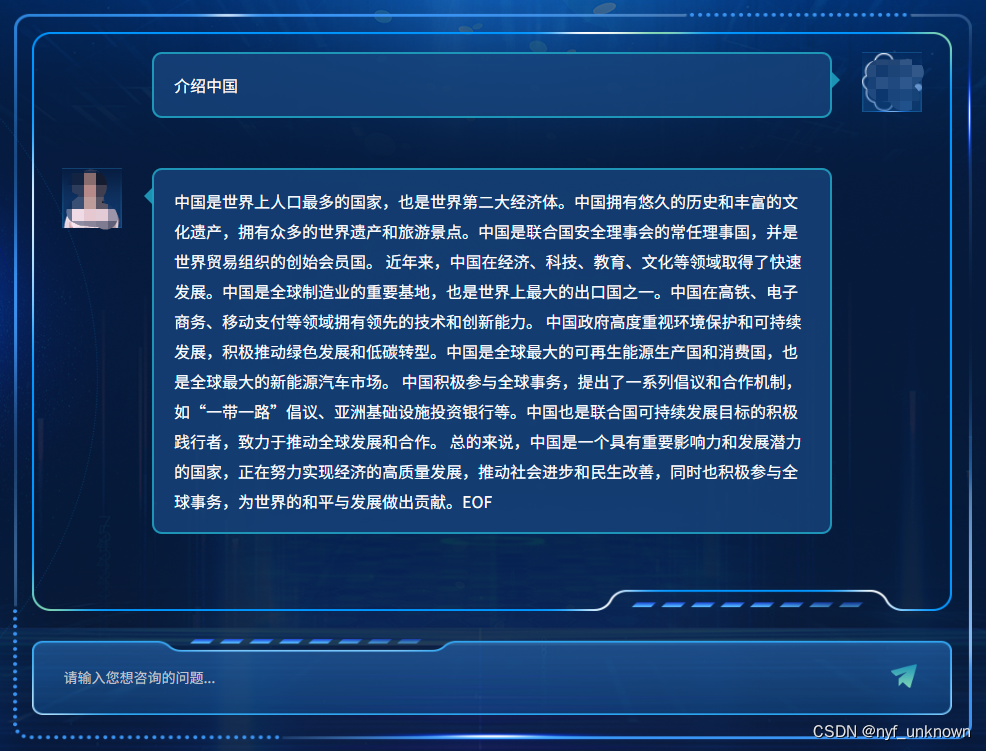
(css)AI智能问答页面布局
(css)AI智能问答页面布局 效果: html <!-- AI框 --><div class"chat-top"><div class"chat-main" ref"chatList"><div v-if"!chatList.length" class"no-message"><span>欢迎使…...
 函数)
【Pytorch学习】pytorch中的isinstance() 函数
描述 isinstance() 函数来判断一个对象是否是一个已知的类型,类似 type()。 isinstance() 与 type() 区别: type() 不会认为子类是一种父类类型,不考虑继承关系。 isinstance() 会认为子类是一种父类类型,考虑继承关系。 如果要判…...

(树) 剑指 Offer 07. 重建二叉树 ——【Leetcode每日一题】
❓剑指 Offer 07. 重建二叉树 难度:中等 输入某二叉树的 前序遍历 和 中序遍历 的结果,请构建该二叉树并返回其根节点。 假设输入的前序遍历和中序遍历的结果中都不含重复的数字。 示例 1: Input: preorder [3,9,20,15,7], inorder [9,3,15,20,7] …...
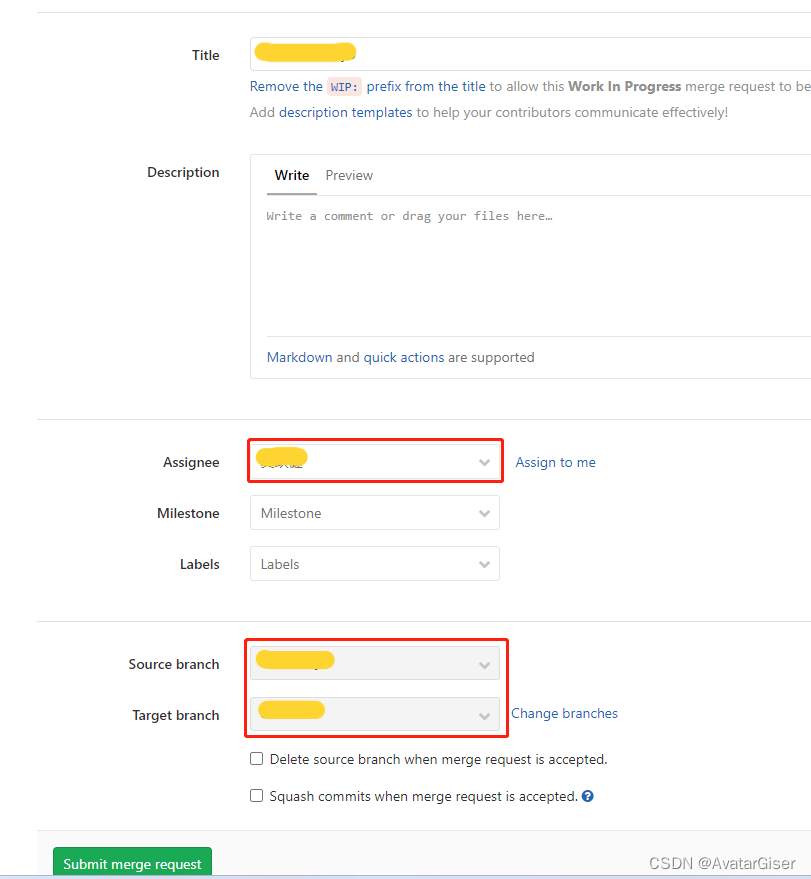
Gitlab 合并分支与请求合并
合并分支 方式一:图形界面 使用 GitGUI,右键菜单“GitExt Browse” - 菜单“命令” - 合并分支 方式二:命令行 在项目根目录下打开控制台,注意是本地 dev 与远程 master 的合并 // 1.查看本地分支,确认当前分支是否…...
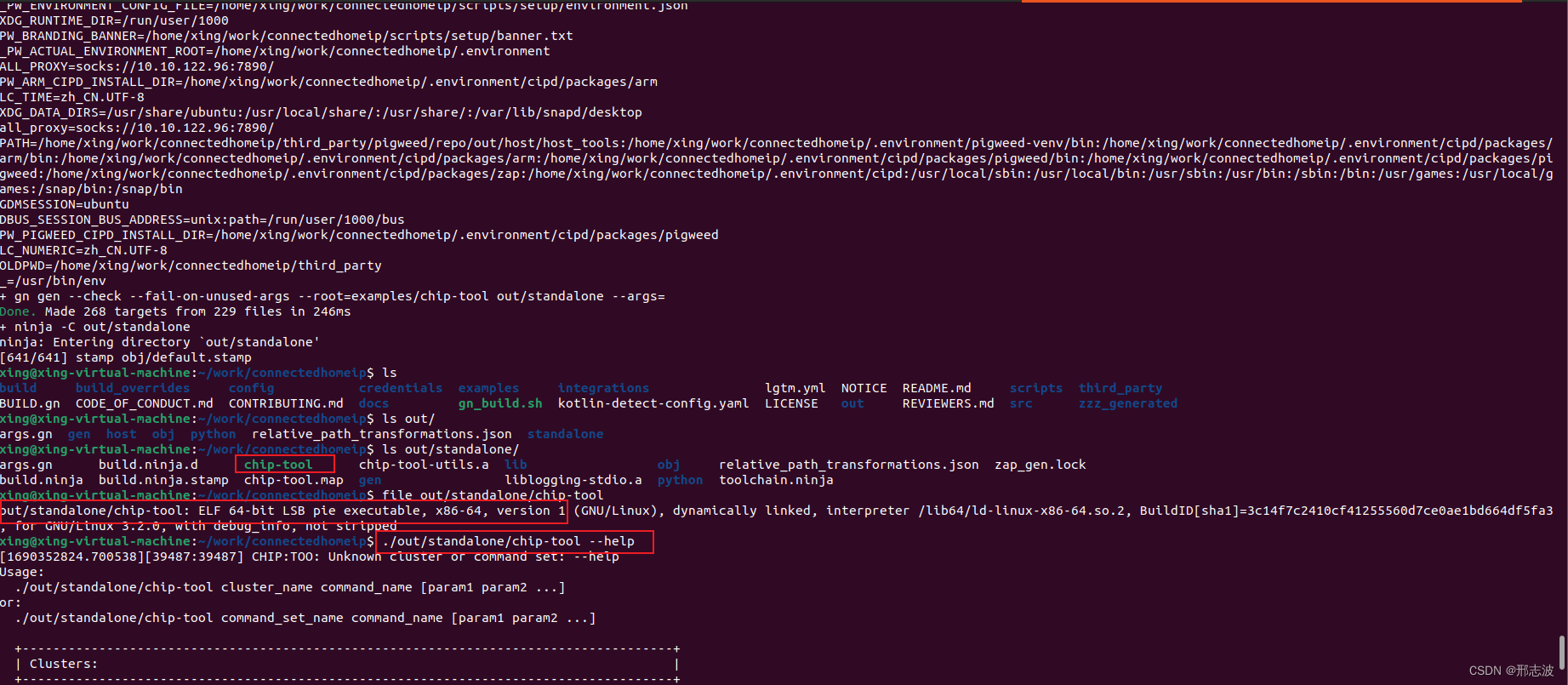
【Matter】基于Ubuntu 22.04 编译chip-tool工具
前言 编译过程有点曲折,做下记录,过程中,有参考别人写的博客,也看github 官方介绍,终于跑通了~ 环境说明: 首先需要稳定的梯子,可以访问“外网”ubuntu 环境,最终成功实验在Ubunt…...

将 MongoDB 的 List<Document> 转换为对象列表
当我们使用 MongoDB 存储数据时,经常会涉及到将 MongoDB 的文档对象转换为对象列表的需求。在 Java 中,我们可以使用 MongoDB 的 Java 驱动程序和自定义类来实现这一转换过程。 本篇博客将介绍如何将 MongoDB 中的 List<Document> 转换为对象列表。…...
【Linux下6818开发板(ARM)】SecureCRT串口和交叉编译工具(巨细版!)
(꒪ꇴ꒪ ),hello我是祐言博客主页:C语言基础,Linux基础,软件配置领域博主🌍快上🚘,一起学习!送给读者的一句鸡汤🤔:集中起来的意志可以击穿顽石!作者水平很有限,如果发现错误&#x…...
应届生如何快速找Java开发工程师,先学会这17个基础问题
一、Java 基础 JDK 和 JRE 有什么区别? JDK:Java Development Kit 的简称,java 开发工具包,提供了 java 的开发环境和运行环境。 JRE:Java Runtime Environment 的简称,java 运行环境,为 java 的…...
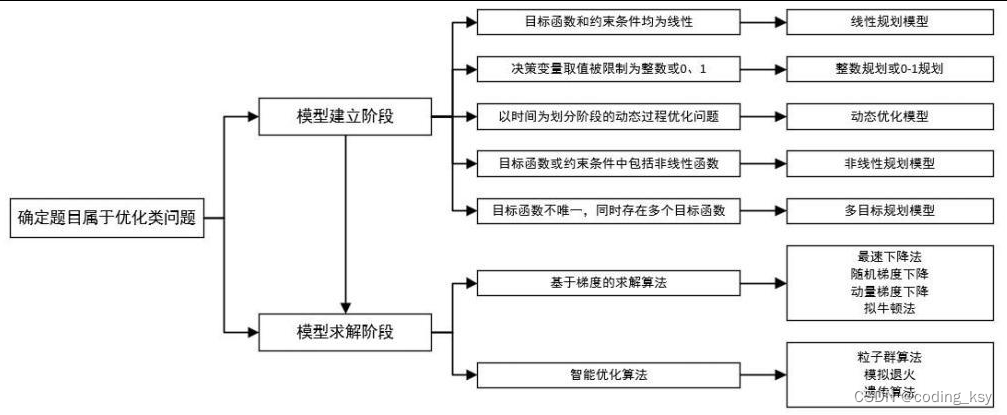
数学建模学习(5):数学建模各类题型及解题方案
一、数学建模常见的题型 总体来说,数学建模赛题类型主要分为:评价类、预测类和优化类三种,其中优化类是最常见的赛题类 型,几乎每年的地区赛或国赛美赛等均有出题,必须要掌握并且熟悉。 二、评价类赛题 综合评价是数学…...
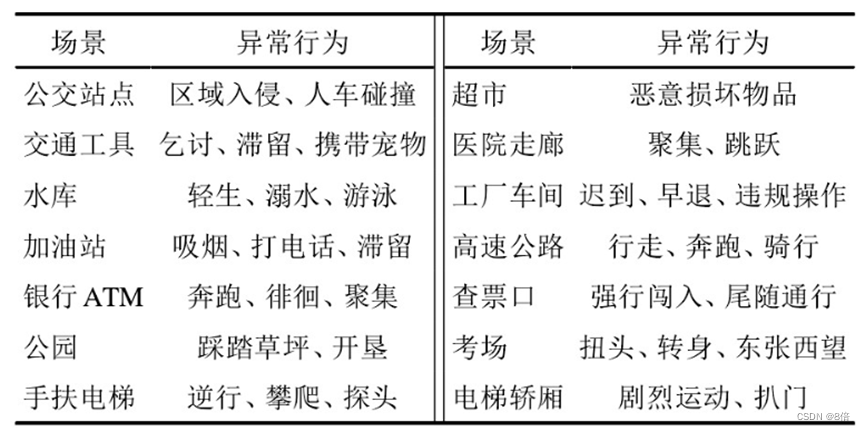
【学习笔记】视频检测方法调研
目录 1 引言2 方法2.1 视频目标跟踪2.1.1 生成式模型方法2.1.2 判别式模型方法2.1.2.1 基于相关滤波跟踪2.1.2.2 基于深度学习跟踪 2.2 视频异常检测2.2.1 基于重构方法2.2.2 基于预测方法2.2.3 基于分类方法2.2.4 基于回归方法 2.3 深度伪造人脸视频检测2.3.1 基于RNN时空融合…...

mxbai-embed-large-v1效果展示:超越OpenAI的文本嵌入模型实测
mxbai-embed-large-v1效果展示:超越OpenAI的文本嵌入模型实测 1. 引言:文本嵌入技术的新标杆 在自然语言处理领域,文本嵌入模型正成为各类智能应用的基础设施。mxbai-embed-large-v1作为最新开源的文本嵌入模型,在MTEB基准测试中…...

程序员副业变现全攻略
CSDN程序员副业图谱技术文章大纲副业方向分类技术变现类:外包开发、技术咨询、代码审核内容创作类:技术博客、视频教程、电子书编写产品开发类:独立应用、开源项目、插件工具教育培训类:在线课程、一对一辅导、技术直播技术栈与工…...

还在用老方法显示数据?手把手教你用MFC的CListCtrl打造一个带图标的学生信息查询系统
实战MFC:用CListCtrl构建可视化学生管理系统 在桌面应用开发领域,数据展示一直是用户体验的核心环节。传统的表格控件虽然能完成基本功能,但缺乏视觉层次和交互灵活性。MFC中的CListCtrl控件提供了四种视图模式,特别适合需要同时呈…...

5块钱的国产RISC-V芯片CH32V103能干啥?我用它复刻了一个STM32F103的小项目
5元国产RISC-V芯片实战:用CH32V103复刻STM32经典项目 在电子DIY领域,成本始终是创客们无法回避的现实问题。当我在某电商平台发现CH32V103这颗标价仅5元的RISC-V芯片时,第一反应是怀疑它的实用性——毕竟同级别的STM32F103C8T6价格通常在15-2…...

Java微服务在Istio中出现“偶发503 no healthy upstream”?7分钟定位Sidecar健康检查盲区与Liveness Probe冲突真相
第一章:Java微服务在Istio中偶发503问题的现象与影响在基于Istio构建的服务网格环境中,Java微服务(尤其是采用Spring Cloud Kubernetes或原生Spring Boot Istio Sidecar部署模式)频繁出现偶发性HTTP 503 Service Unavailable响应…...

Git-RSCLIP入门到精通:从基础地物识别到复杂场景分析全流程解析
Git-RSCLIP入门到精通:从基础地物识别到复杂场景分析全流程解析 1. 遥感智能分析的新利器 在遥感图像分析领域,传统方法往往需要大量标注数据和复杂的模型训练流程。Git-RSCLIP的出现彻底改变了这一局面,它基于先进的SigLIP架构,…...

DriverStore Explorer:突破Windows驱动管理瓶颈,释放系统空间提升80%存储效率
DriverStore Explorer:突破Windows驱动管理瓶颈,释放系统空间提升80%存储效率 【免费下载链接】DriverStoreExplorer Driver Store Explorer [RAPR] 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer 诊断存储异常:设…...

Qwen3.5-2B图文理解教程:GIF动图逐帧理解+动态内容总结生成方法
Qwen3.5-2B图文理解教程:GIF动图逐帧理解动态内容总结生成方法 1. 引言 Qwen3.5-2B是一款轻量化多模态基础模型,属于Qwen3.5系列的小参数版本(20亿参数)。这款模型主打低功耗、低门槛部署,特别适配端侧和边缘设备&am…...

告别‘塑料感’渲染:IBGS如何用‘颜色残差’让3D高斯重建的物体更真实?
告别‘塑料感’渲染:IBGS如何用‘颜色残差’让3D高斯重建的物体更真实? 当你在虚拟场景中看到一个金属茶壶时,是否总觉得它像玩具一样缺乏真实感?这就是当前3D高斯溅射(3DGS)技术面临的"塑料感"困…...

华为交换机等保2.0实战:手把手配置身份鉴别,从密码策略到登录超时
华为交换机等保2.0身份鉴别全流程配置指南 当企业网络面临等保2.0合规检查时,身份鉴别环节往往是整改重点。作为网络安全工程师,我曾协助多家企业通过等保测评,发现华为交换机的身份鉴别配置存在不少易忽略的细节。本文将分享一套经过实战验证…...