随手笔记——演示如何提取 ORB 特征并进行匹配
随手笔记——演示如何提取 ORB 特征并进行匹配
- 说明
- 知识点
- 源代码
说明
演示如何提取 ORB 特征并进行匹配
知识点
特征点由关键点(Key-point)和描述子(Descriptor)两部分组成。
ORB 特征亦由关键点和描述子两部分组成。它的关键点称为“Oriented FAST”,是一种改进的 FAST 角点。它的描述子称为 BRIEF(Binary Robust Independent Elementary Feature)。因此,提取ORB 特征分为如下两个步骤:
- FAST 角点提取:找出图像中的“角点”。相较于原版的 FAST,ORB 中计算了特征点的主方
向,为后续的 BRIEF 描述子增加了旋转不变特性。 - BRIEF 描述子:对前一步提取出特征点的周围图像区域进行描述。ORB 对 BRIEF 进行了一
些改进,主要是指在 BRIEF 中使用了先前计算的方向信息。
源代码
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <chrono>using namespace std;
using namespace cv;int main(int argc, char **argv) {if (argc != 3) {cout << "usage: feature_extraction img1 img2" << endl;return 1;}//-- 读取图像Mat img_1 = imread(argv[1], CV_LOAD_IMAGE_COLOR);Mat img_2 = imread(argv[2], CV_LOAD_IMAGE_COLOR);assert(img_1.data != nullptr && img_2.data != nullptr);//-- 初始化std::vector<KeyPoint> keypoints_1, keypoints_2;Mat descriptors_1, descriptors_2;Ptr<FeatureDetector> detector = ORB::create();Ptr<DescriptorExtractor> descriptor = ORB::create();Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce-Hamming");//-- 第一步:检测 Oriented FAST 角点位置chrono::steady_clock::time_point t1 = chrono::steady_clock::now();detector->detect(img_1, keypoints_1);detector->detect(img_2, keypoints_2);//-- 第二步:根据角点位置计算 BRIEF 描述子descriptor->compute(img_1, keypoints_1, descriptors_1);descriptor->compute(img_2, keypoints_2, descriptors_2);chrono::steady_clock::time_point t2 = chrono::steady_clock::now();chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);cout << "extract ORB cost = " << time_used.count() << " seconds. " << endl;Mat outimg1;drawKeypoints(img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT);imshow("ORB features", outimg1);//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离vector<DMatch> matches;t1 = chrono::steady_clock::now();matcher->match(descriptors_1, descriptors_2, matches);t2 = chrono::steady_clock::now();time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);cout << "match ORB cost = " << time_used.count() << " seconds. " << endl;//-- 第四步:匹配点对筛选// 计算最小距离和最大距离auto min_max = minmax_element(matches.begin(), matches.end(),[](const DMatch &m1, const DMatch &m2) { return m1.distance < m2.distance; });double min_dist = min_max.first->distance;double max_dist = min_max.second->distance;printf("-- Max dist : %f \n", max_dist);printf("-- Min dist : %f \n", min_dist);//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.std::vector<DMatch> good_matches;for (int i = 0; i < descriptors_1.rows; i++) {if (matches[i].distance <= max(2 * min_dist, 30.0)) {good_matches.push_back(matches[i]);}}//-- 第五步:绘制匹配结果Mat img_match;Mat img_goodmatch;drawMatches(img_1, keypoints_1, img_2, keypoints_2, matches, img_match);drawMatches(img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch);imshow("all matches", img_match);imshow("good matches", img_goodmatch);waitKey(0);return 0;
}
注:以上笔记仅供个人学习使用,如有侵权,请联系!
相关文章:

随手笔记——演示如何提取 ORB 特征并进行匹配
随手笔记——演示如何提取 ORB 特征并进行匹配 说明知识点源代码 说明 演示如何提取 ORB 特征并进行匹配 知识点 特征点由关键点(Key-point)和描述子(Descriptor)两部分组成。 ORB 特征亦由关键点和描述子两部分组成。它的关键…...

Python访问者模式介绍、使用
目录 一、Python访问者模式介绍 二、访问者模式使用 一、Python访问者模式介绍 访问者模式(Visitor Pattern)是一种行为型设计模式,它能够将算法与对象结构分离,使得算法可以独立于对象结构而变化。这个模式的主要思想是&#…...

深度学习实际使用经验总结
以下仅是个人在使用过程中的经验总结,请谨慎参考。 常用算法总结 图像分类 常用算法(可作为其他任务的骨干网络):服务端:VGG、ResNet、ResNeXt、DenseNet移动端:MobileNet、ShuffleNet等适用场景&#x…...
【广州华锐互动】AR智慧机房设备巡检系统
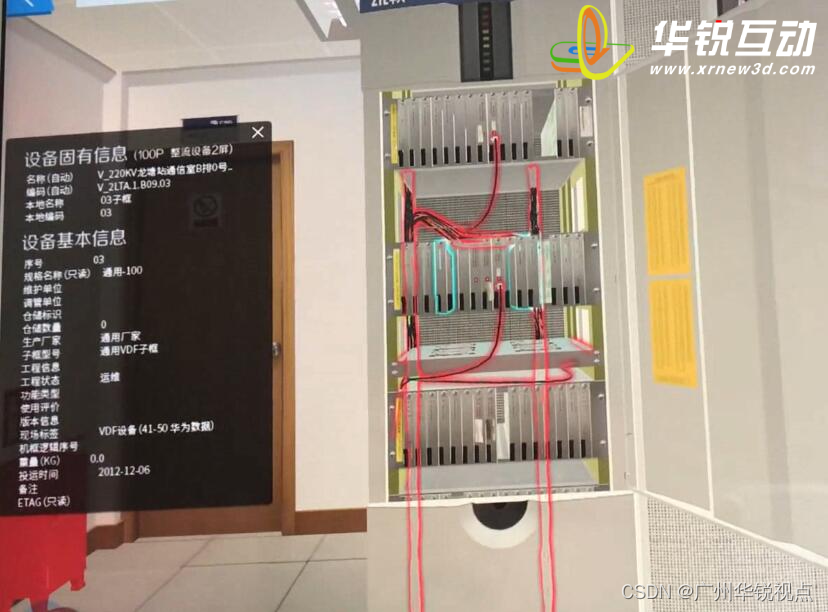
AR智慧机房设备巡检系统是一种新型的机房巡检方式,它通过使用增强现实技术将机房设备、环境等信息实时呈现在用户面前,让巡检人员可以更加高效地完成巡检任务。 首先,AR智慧机房设备巡检系统具有极高的智能化程度。该系统可以根据用户设定的…...

关于Ubuntu 18.04 LTS环境下运行程序出现的问题
关于Ubuntu 18.04 LTS环境下运行程序出现的问题 1.运行程序时出现以下情况 2.检查版本 strings /lib/x86_64-linux-gnu/libc.so.6 |grep GLIBC_ 发现Ubuntu18.04下的glibc版本最高为2.27,而现程序所使用的是glibc2.34,所以没办法运行, 3.解决办法 安装glibc2.34库, …...

「苹果安卓」手机搜狗输入法怎么调整字体大小及键盘高度?
手机搜狗输入法怎么调整字体大小及键盘高度? 1、在手机上准备输入文字,调起使用的搜狗输入法手机键盘; 2、点击搜狗输入法键盘左侧的图标,进入更多功能管理; 3、在搜狗输入法更多功能管理内找到定制工具栏,…...
【人工智能】神经网络、前向传播、反向传播、梯度下降、局部最小值、多层前馈网络、缓解过拟合的策略
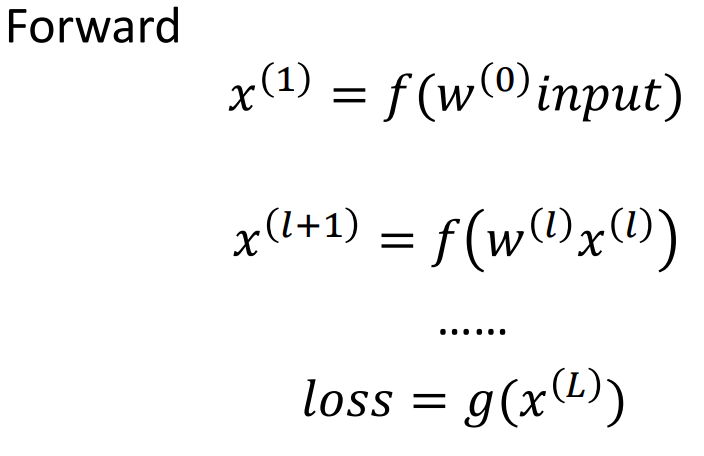
神经网络、前向传播、反向传播 文章目录 神经网络、前向传播、反向传播前向传播反向传播梯度下降局部最小值多层前馈网络表示能力多层前馈网络局限缓解过拟合的策略前向传播是指将输入数据从输入层开始经过一系列的权重矩阵和激活函数的计算后,最终得到输出结果的过程。在前向…...

一个tomcat部署两个服务的server.xml模板
一个服务的文件夹名字叫hospital,一个服务的文件夹叫ROOT,一个tomcat运行两个服务如何配置呢?注意一个appBase为webapps,另一个appBase为webapps1,当然也可以放在一个webappps里面。 <Service name"Catalina">&l…...

CentOS 7安装Docker
文章目录 安装Docker1.CentOS安装Docker1.1.卸载(可选)1.2.安装docker1.3.启动docker1.4.配置镜像加速 2.CentOS7安装DockerCompose2.1.下载2.2.修改文件权限2.3.Base自动补全命令: 3.Docker镜像仓库3.1下载一个镜像 安装Docker Docker 分为 …...

Nginx前端部署
1. 前端打包 执行如下命令,构建前端代码,构建成功后会在目录dist下生成构建完成的文件,将dist整个文件夹拷贝到服务器中 npm install npm run build dev 2.nginx配置 进入nginx目录/usr/local/nginx/conf,修改nginx.conf文件&a…...

17网商品详情API:使用与数据解析方法
17网是一家知名的电商平台,提供了大量的商品选择。开发者可以通过17网的商品详情API来快速获取和展示商品的详细信息。 17网商品详情API简介 介绍17网商品详情API的作用和目的,解释为何使用该API可以实现丰富的商品详情展示功能。 获取API访问权限 说…...
解决新版 Idea 中 SpringBoot 热部署不生效
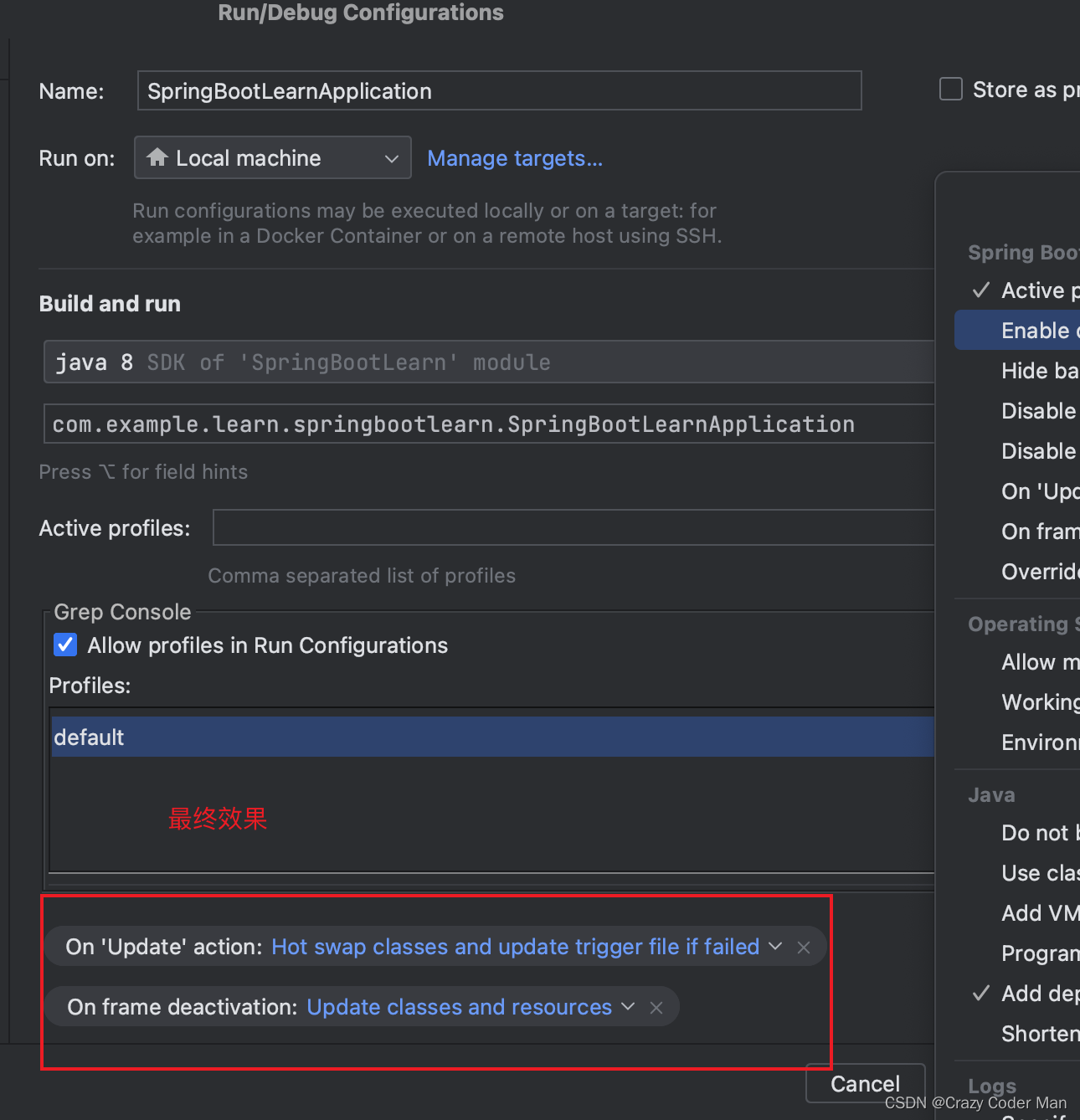
标题 依赖中添加 <dependency> <groupId>org.springframework.boot</groupId> <artifactId>spring-boot-devtools</artifactId> <scope>runtime</scope> <opt…...

Node.js: express + MySQL实现修改密码
实现修改密码,本篇文章实现修改密码只考虑以下几个方面: (1),获取旧密码 (2),获取新密码 (3),将获取到的旧密码与数据库中的密码进行比对…...

ArduPilot之433电传模块集成之H7Dual飞控Rx/Tx丝印问题
ArduPilot之433电传模块集成之H7Dual飞控Rx/Tx丝印问题 1. 源由2. 安装3. 排查3.1 电气连接3.2 软件配置3.3 模块测试3.4 通信测试3.5 定位问题 4. 总结5. 参考资料 1. 源由 鉴于最近iNav最新固件6.1.1出现远航炸机,还是回到相对可靠的Ardupilot,在Mavl…...

python爬虫优化手段
当使用Python进行网络资源爬取时,会涉及到网络请求、数据处理和存储等操作,这些操作可能会对电脑性能产生一定的影响。以下是一些关于Python爬取网络资源的常见注意事项: 网络请求频率:频繁的网络请求可能会对电脑性能产生较大的影…...

Bootstrap-学习文档
Bootstrap 简介 什么是 Bootstrap? Bootstrap 是一个用于快速开发 Web 应用程序和网站的前端框架。 Bootstrap是前端开发中比较受欢迎的框架,简洁且灵活。它基于HTML、CSS和JavaScript,HTML定义页面元素,CSS定义页面布局&#x…...
【图像分类】CNN + Transformer 结合系列.1
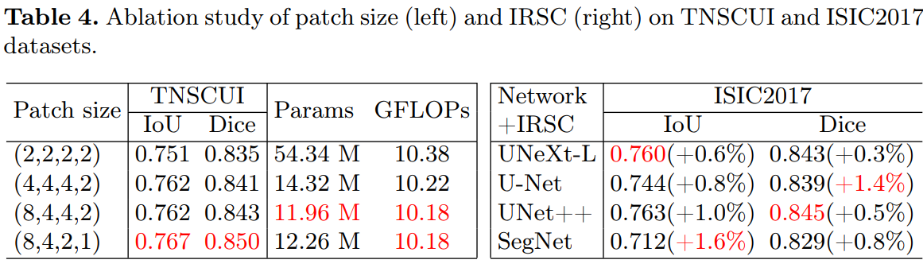
介绍三篇结合使用CNNTransformer进行学习的论文:CvT(ICCV2021),Mobile-Former(CVPR2022),SegNetr(arXiv2307). CvT: Introducing Convolutions to Vision Transformers, …...

Stable Diffusion - 扩展 SegmentAnything 和 GroundingDINO 实例分割算法 插件的配置与使用
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://blog.csdn.net/caroline_wendy/article/details/131918652 Paper and GitHub: Segment Anything: SAM - Segment Anything GitHub: https://github.com/facebookresearch/s…...
-[基础知识])
自然语言处理从入门到应用——LangChain:提示(Prompts)-[基础知识]
分类目录:《自然语言处理从入门到应用》总目录 模型编程的新方法是使用提示(Prompts)。提示指的是模型的输入。这个输入通常由多个组件构成。PromptTemplate负责构建这个输入,LangChain提供了多个类和函数,使得构建和处…...
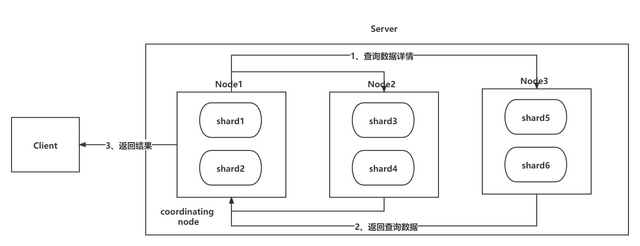
Elasticsearch-增删改查数据工作原理
集群 集群的基本概念: 集群:ES 集群由一个或多个 Elasticsearch 节点组成,每个节点配置相同的 cluster.name 即可加入集群,默认值为 “elasticsearch”。节点:一个 Elasticsearch 服务启动实例就是一个节点ÿ…...
)
告别微信传文件!用LocalSend+cpolar搭建私人远程文件库(Windows保姆级教程)
打造私人云存储:LocalSend与cpolar的极简文件共享方案 你是否经历过这样的场景:在咖啡馆急需调取家里电脑的一份文档,却只能对着微信传输助手的"文件大小超过限制"提示干着急?或是出差在外,发现手机里缺少一…...
数据与MATLAB实现)
近场声全息(NAH)数据与MATLAB实现
一、近场声全息核心原理 近场声全息(NAH)通过测量声源近场区域的声压分布(包含传播波和倏逝波成分),利用空间傅里叶变换重建声场分布。其核心公式基于Helmholtz-Kirchhoff积分方程:其中: p0(kx,…...

Guardrails未来版本路线图:10大新功能全面展望与AI安全演进
Guardrails未来版本路线图:10大新功能全面展望与AI安全演进 【免费下载链接】guardrails Adding guardrails to large language models. 项目地址: https://gitcode.com/gh_mirrors/gu/guardrails 在大型语言模型(LLM)应用日益普及的今…...

C++ ONNX Runtime推理踩坑记:为什么我的全局Session一Run就报ORT_RUNTIME_EXCEPTION?
C ONNX Runtime推理异常解析:全局Session与Env生命周期的陷阱 在C项目中使用ONNX Runtime进行模型推理时,许多开发者都遇到过这样一个令人困惑的场景:明明代码逻辑看起来完全正确,却在调用Session.Run()时突然抛出ORT_RUNTIME_EXC…...

戴森球计划FactoryBluePrints蓝图库:从新手到专家的终极工厂建设指南
戴森球计划FactoryBluePrints蓝图库:从新手到专家的终极工厂建设指南 【免费下载链接】FactoryBluePrints 游戏戴森球计划的**工厂**蓝图仓库 项目地址: https://gitcode.com/GitHub_Trending/fa/FactoryBluePrints FactoryBluePrints蓝图库是戴森球计划游戏…...

【Visual Leak Detector】跨平台 QT 项目集成 VLD 的便携式部署方案
1. Visual Leak Detector 与 QT 开发的那些事儿 做 C 开发的朋友应该都遇到过内存泄漏这个头疼的问题。特别是用 QT 开发跨平台应用时,随着项目规模扩大,内存管理就变得格外棘手。Visual Leak Detector(简称 VLD)这个轻量级工具简…...

PlotJuggler颜色映射终极指南:如何创建惊艳的数据可视化效果
PlotJuggler颜色映射终极指南:如何创建惊艳的数据可视化效果 【免费下载链接】PlotJuggler The Time Series Visualization Tool that you deserve. 项目地址: https://gitcode.com/gh_mirrors/pl/PlotJuggler PlotJuggler是一款功能强大的时间序列数据可视化…...

Tree of Thoughts终极指南:5分钟掌握思维树算法原理与实战应用
Tree of Thoughts终极指南:5分钟掌握思维树算法原理与实战应用 【免费下载链接】tree-of-thought-llm [NeurIPS 2023] Tree of Thoughts: Deliberate Problem Solving with Large Language Models 项目地址: https://gitcode.com/gh_mirrors/tr/tree-of-thought-l…...

美国人形机器人发展浅析
美国人形机器人产业正从实验室研发向工业实用化与商业化加速过渡,主要企业(波士顿动力、特斯拉、Figure AI等)均已推出量产级产品,覆盖工业制造、军事应用等核心场景,技术迭代与规模化部署成为当前行业关键词。一、主要…...

终极指南:如何为Muzei Live Wallpaper配置GitHub Actions自动化构建与测试
终极指南:如何为Muzei Live Wallpaper配置GitHub Actions自动化构建与测试 【免费下载链接】muzei Muzei Live Wallpaper for Android 项目地址: https://gitcode.com/gh_mirrors/mu/muzei Muzei Live Wallpaper是一款备受欢迎的Android动态壁纸应用…...