openpnp - 设备矫正的零碎记录
文章目录
- openpnp - 设备矫正的零碎记录
- 概述
- 笔记
- 设备内部不能有任何强干扰源
- 相机就选100W像素的就行, 没有特殊要求
- openpnp软件的选择
- 视觉归位必须禁止
- 轴的赤隙矫正不用做
- 运行openpnp软件的计算机, 必须是台式机
- 校验完成后, 数据占用的体积
- END
openpnp - 设备矫正的零碎记录
概述
设备矫正终于正常通过了…
从头进行多次设备校验, 都能一次性校验通过, 重复性很好.
补充一些矫正过程中的细节.
同学说我是过度矫正, 太不负责任了, 听的我浑身难受. 同学做的任何事情, 都是抱着凑合的态度来做事, 这对自己和别人都不好啊. 这样做事, 口碑都没了.
这次定制的设备, 主干是好的(丝杠, 伺服, 机械强度, 结构设计), 我确实很感谢.
细节的问题, 一定是有的(非标设备, 又是改型的第一台, 不可能细节都到位), 这是正常的, 大家都能理解. 对于细节问题, 大家一起来当作自己的事情来解决, 出主意, 想办法, 这才是正道啊.
设备自带的顶部相机高级矫正和底部相机高级矫正, 是用来矫正相机安装的垂直度补偿的(谁能保证机械部分安装是完全垂直的?), 如果矫正通不过, 那贴片精度根本就无从谈起.
用了4个月, 终于让设备到达了一个出厂设备应该有的正常状态, 味道有点苦.
笔记
设备内部不能有任何强干扰源
我的设备里面安装的真空泵, 是个强干扰源. 是设备矫正过程中的数据受到了干扰. 设备矫正过程时间很长, 真空泵启动的次数很多, 保不准就干扰到啥, 导致无法走完设备校验流程. 即使侥幸走完设备校验流程, 等正常贴片流程时, 还会有干扰.
后来拆掉了设备自带的真空泵, 用冰箱压缩机改了一个真空泵(openpnp - 用空调压缩机改真空泵), 消除了干扰源.
自己做的这个真空泵是否对贴片操作有干扰, 有待观察. 初步看, 是没有影响的.
相机就选100W像素的就行, 没有特殊要求
官方推荐, 就使用100W像素的彩色相机. 这种相机价格不到100RMB.
只要设备没有强干扰, 对相机的垂直度安装, 也没有特别高的要求. 肉眼可见的垂直就行. 有条件时, 可以拿三角尺大概齐看一下.
相机设置时, 去掉自动选项(e.g. 自动曝光, 自动白平衡)
openpnp软件的选择
官方最新的OpenPnP-windows-x64-develop_2023-03-15_00-30-21.460d8aa.exe, 有bug. 底部相机高级矫正完成后, 底部相机标尺分的太细了(密密麻麻的, 像毛毛虫一样). 导致将N1移动到底部相机上, 无论如何缩放, 都看不到正常图像.
我用的是官方的OpenPnP-windows-x64-develop_2022-08-01_18-07-09.2a36a8d.exe, 这个稳定版好使.
但是操作流程上, 需要注意, 必须将当前步骤需要的前置操作先用UI配置完, 否则会导致软件崩溃. (e.g. 矫正N2和相机的偏移时, 必须先设置N2的换刀区, 然后将N2吸嘴载入, 然后才去执行 N2和相机的偏移的矫正)
视觉归位必须禁止
如果使能了视觉归位, 再移动到主基准点, 次基准点时, 位置就偏差了不少. 再重新设置主/次基准点位置, 视觉归位后, 再移动到主/次基准点, 位置还是偏的.
不使能视觉归位, 一切都是正常的.
同学也跟我说, 不要使能视觉归位, 原因他没说.
轴的赤隙矫正不用做
这个点同学说的对, 对于丝杠设备, 齿隙矫正是不必要的.
我的设备X/Y轴是丝杠, 精度由伺服和丝杠来保证. 不用做齿隙矫正
Z轴是步进电机+皮带传动, 但是行程短(+/-20mm), 不用做齿隙矫正.
C1, C2是旋转轴, 也不用做齿隙矫正.
运行openpnp软件的计算机, 必须是台式机
应该和USB口的供电和通讯速率有关系. 应该独立的USB口更好.
笔记本上的独立的USB口不够用(一般就是2,3个, 还要插入鼠标).
台式机上的独立USB口够用, 至少能用4~8个.
如果使用笔记本+USB扩展坞(冰沙主板, 顶部相机, 底部相机), 不好. 发现顶部相机的图像, 过10秒钟, 就会闪一下, 图像不是一个连续完整的图像. 这个不连续, 不是受干扰引起的, 看起来更像通讯带宽不够引起的.
据我的经验, 如果发现有不正常的情况, 就要停下来, 将问题解决掉. 否则不知道会带来啥新问题.
当使用台式机时, 插入设备的3条USB线, 使用OpenPnP-windows-x64-develop_2022-08-01_18-07-09.2a36a8d.exe, 可以正常将校验流程走完. 最后一步是底部相机高级矫正, 当底部相机高级矫正完成后, 看底部相机标尺的分隔, 是正常的分隔(而不是密密麻麻的标尺分隔), 将N1移动到底部相机下, 可以看到正常图像. 缩放底部相机图像, 图像的缩放层级比矫正前多很多.
校验完成后, 数据占用的体积
一次性校验通过, .openpnp2目录体积约为400MB. 备份好.
以后可以观察正常贴片后, 多出哪些可以删除的文件.
END
相关文章:

openpnp - 设备矫正的零碎记录
文章目录 openpnp - 设备矫正的零碎记录概述笔记设备内部不能有任何强干扰源相机就选100W像素的就行, 没有特殊要求openpnp软件的选择视觉归位必须禁止轴的赤隙矫正不用做运行openpnp软件的计算机, 必须是台式机校验完成后, 数据占用的体积END openpnp - 设备矫正的零碎记录 概…...

Linux内核中的链表、红黑树和KFIFO
lLinux内核代码中广泛使用了链表、红黑树和KFIFO。 一、 链表 linux内核代码大量使用了链表这种数据结构。链表是在解决数组不能动态扩展这个缺陷而产生的一种数据结构。链表所包含的元素可以动态创建并插入和删除。链表的每个元素都是离散存放的,因此不需要占用连…...
【C++】做一个飞机空战小游戏(二)——利用getch()函数实现键盘控制单个字符移动
[导读]本系列博文内容链接如下: 【C】做一个飞机空战小游戏(一)——使用getch()函数获得键盘码值 【C】做一个飞机空战小游戏(二)——利用getch()函数实现键盘控制单个字符移动 在【C】做一个飞机空战小游戏(一)——使用getch()函数获得键盘码值一文中介绍了如何利用…...
)
Android 设备兼容性使用(详细版)
经典好文推荐,通过阅读本文,您将收获以下知识点: 一、设备兼容性分类 二、硬件设备兼容 三、软件 APP 兼容 四、兼容不同语言 五、兼容不同分辨率 六、兼容不同屏幕方向布局 七、兼容不同硬件 Feature 八、兼容不同SDK平台 一、设备兼容性分类 Android设计用于运行在许多不同…...

React 中的常见 API 和生命周期函数
目录 useStateuseEffectuseRefdangerouslySetInnerHTML生命周期函数 constructorcomponentDidMountstatic getDerivedStateFromPropsshouldComponentUpdatecomponentDidUpdatecomponentWillUnmount useState useState 是 React 的一个 Hook,用于在函数组件中添加…...
)
神经网络中遇到的 python 函数(Pytorch)
1.getattr() 函数用于返回一个对象属性值。 def getattr(object, name, defaultNone): # known special case of getattr"""getattr(object, name[, default]) -> valueGet a named attribute from an object; getattr(x, y) is equivalent to x.y.When a …...
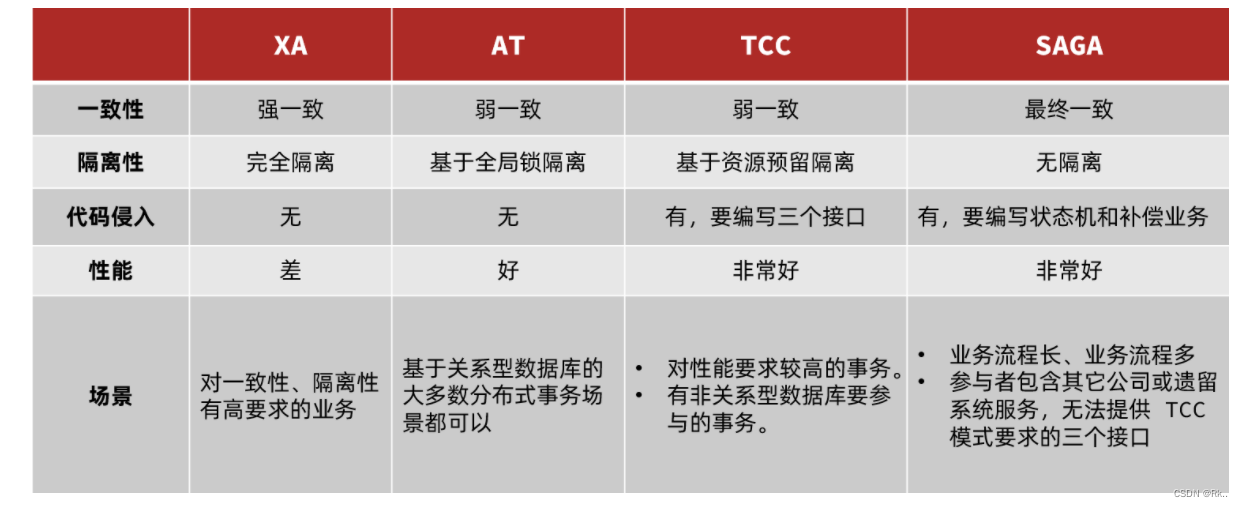
分布式事务及解决方案
1、分布式事务 分布式事务就是在一个交易中各个服务之间的相互调用必须要同时成功或者同时失败,保持一致性和可靠性。在单体项目架构中,在多数据源的情况下也会发生 分布式事务问题。本质上来说,分布式事务就是为了保证不同数据库的数据一致性…...

【宏定义】——编译时校验
文章目录 编译时校验功能描述代码实现示例代码正常编译示例编译错误示例预处理之后的结果 代码解析!!estruct {int:-!!(e); }sizeof(struct {int:-!!(e); }) 参考代码 编译时校验 功能描述 用于在编译时检查一个条件是否为真,如果条件为真则会编译失败,…...

C#学习系列之System.Windows.Data Error: 40报错
C#学习系列之System.Windows.Data Error: 40报错 前言报错内容解决总结 前言 在用户界面使用上,代码运行没有问题,但是后台报错,仔细研究了报错内容,解决问题,所以记录一下。 报错内容 System.Windows.Data Error: 4…...
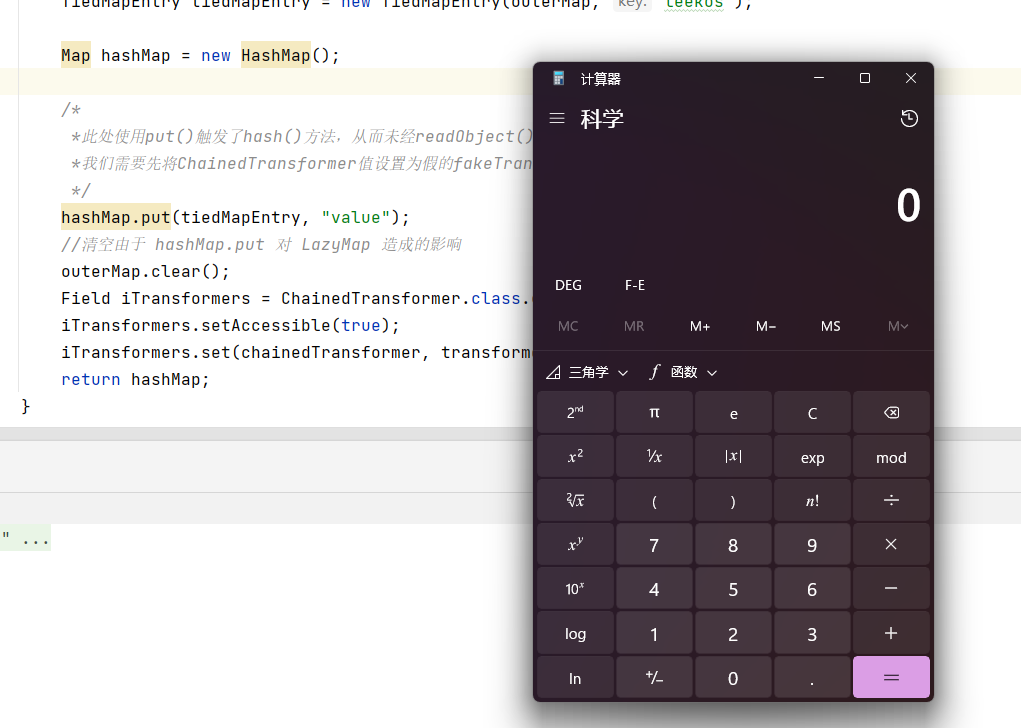
【java安全】RMI
文章目录 【java安全】RMI前言RMI的组成RMI实现Server0x01 编写一个远程接口0x02 实现该远程接口0x03 Registry注册远程对象 Client 小疑问RMI攻击 【java安全】RMI 前言 RMI全称为:Remote Method Invocation 远程方法调用,是java独立的一种机制。 RM…...
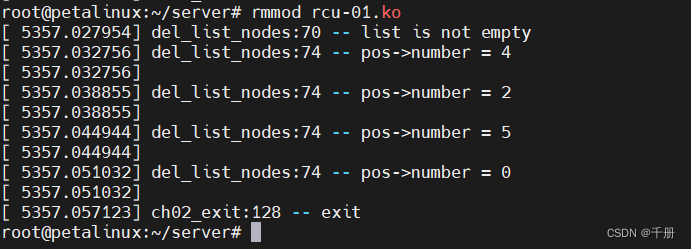
rcu链表综合实践
基础知识 rcu-read copy update的缩写。和读写锁起到相同的效果。据说牛逼一点。对于我们普通程序员,要先学会使用,再探究其内部原理。 链表的数据结构: struct list_head {struct list_head *next, *prev; };还有一种:struct h…...

odoo16-python框架-动作
总结 1 模型和视图的 设计之美 view_ids, view_id,view_mode 最终目的都是为了生成views, 也就是视图. 模型是死的,像男人,一成不变 视图像女人,千变万化, 姿态万千 一阴一阳之谓道,设计之美又在这里得到了体现 2 所有的动作都可以通过web界面来配置 可以通过在"设…...

微信小程序——同一控件的点击与长按事件共存的解决方案
✅作者简介:2022年博客新星 第八。热爱国学的Java后端开发者,修心和技术同步精进。 🍎个人主页:Java Fans的博客 🍊个人信条:不迁怒,不贰过。小知识,大智慧。 💞当前专栏…...
selenium自动化-获取元素属性信息
在写自动化过程中我们会想验证自己的代码是否正确,比如登录之后,通过用户名或其他信息来证明你登录成功,或者点击链接后,是否会跳转新的页面。通过获取元素属性信息,可以解决我们的疑惑。 一、获取内容对象的内容信息 …...
LabVIEW开发小型减阻试验平台
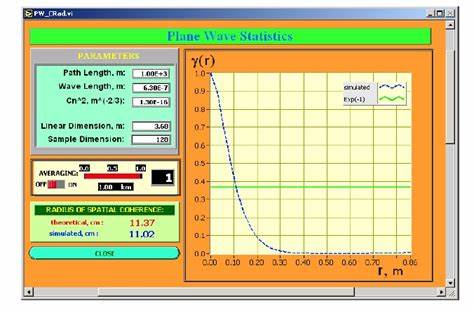
LabVIEW开发小型减阻试验平台 湍流摩擦在粘性流体的阻力中起着重要作用,减少湍流摩擦是流体力学领域的热门话题之一。在油气管道的长距离流体输送中,泵站提供的几乎所有动力都用于克服流体的胫骨摩擦。在流体输送领域,船舶的蒙皮摩擦阻力占总…...

解决分类任务中数据倾斜问题
大家好,在处理文本分类任务时,基准测试流行的自然语言处理架构的性能是建立对可用选项的理解的重要步骤。在这里,本文将深入探讨与分类相关的最常见的挑战之一——数据倾斜。如果你曾经将机器学习(ML)应用于真实世界的…...

Vue3 word如何转成pdf代码实现
🙂博主:锅盖哒 🙂文章核心:word如何转换pdf 目录 1.前端部分 2.后端部分 在Vue 3中,前端无法直接将Word文档转换为PDF,因为Word文档的解析和PDF的生成通常需要在后端进行。但是,你可以通过Vu…...

fpga--流水灯
fpga流水灯的设计 思路:外部时钟频率50mhz,若要实现每隔0.5s闪烁一次,则使用内部计数器计数到24999999拉高一个周期电平,当电平被拉高的时候,进行LED灯电平的设置,每次检测到高电平,就进行一位…...
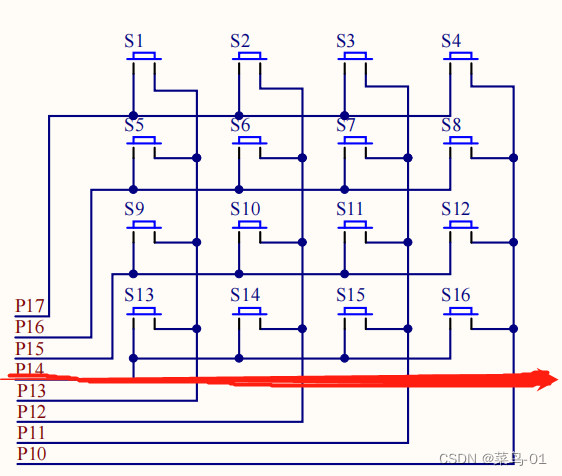
51单片机:数码管和矩阵按键
目录 一:动态数码管模块 1:介绍 2:共阴极和共阳极 A:共阴极 B:共阳极 C:转化表 3:74HC138译码器 4:74HC138译码器控制动态数码管 5:数码管显示完整代码 二:矩阵按键模块 1:介绍 2:原理图 3:矩阵按键代码 一:动态数码管模块 1:介绍 LED数码管:数码管是一种…...
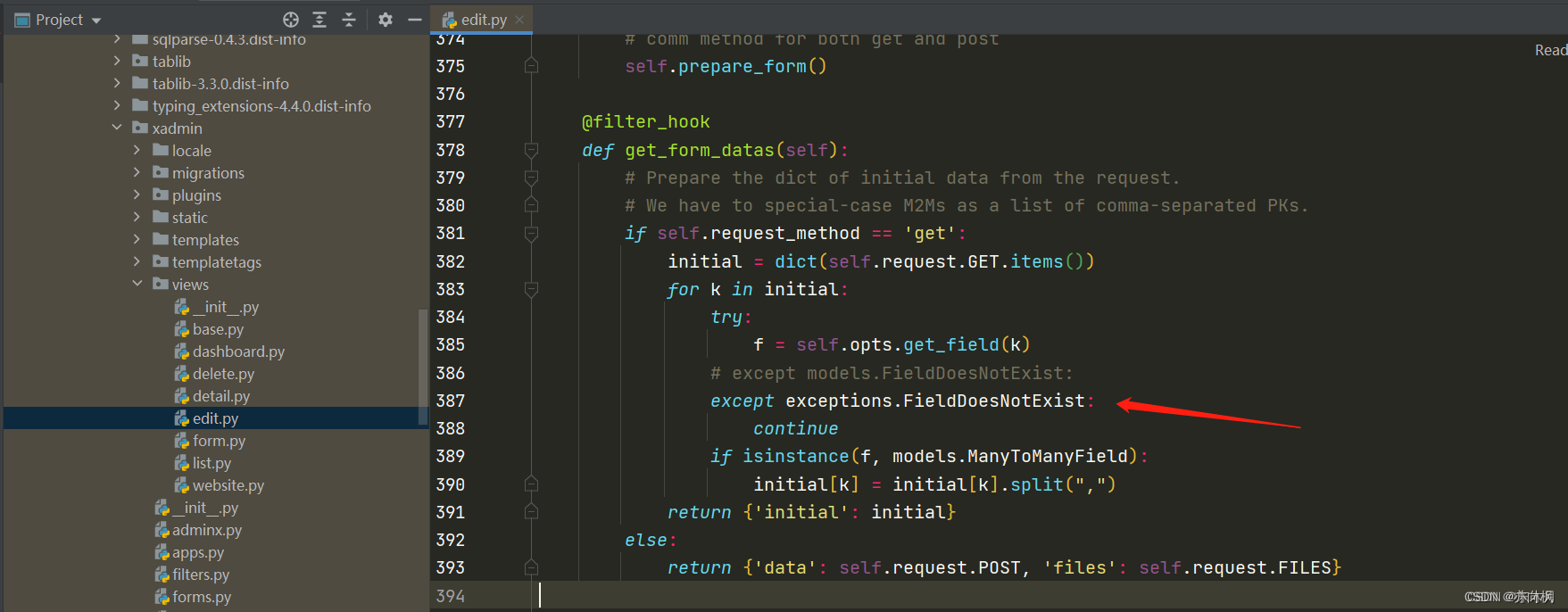
Django + Xadmin 数据列表复选框显示为空,怎么修复这个问题?
问题描述: 解决方法: 后续发现的报错: 解决方案: 先根据报错信息定位到源代码: 在该文件顶部写入: from django.core import exceptions然后把: except models.FieldDoesNotExist修改为&…...

Agent开发面试通关攻略:吃透稳拿offer
阅读前置:2026年当下最卷也最缺人的AI岗位,一定是AI Agent开发。最近刷遍CSDN、牛客、力扣最新面经,发现一个非常明显的招聘趋势:普通大模型微调岗位饱和内卷,而AI Agent开发岗位人才严重缺口,薪资更高、竞…...

OpenClaw 连接阿里云百炼图文教程
OpenClaw 连接阿里云百炼图文教程 前置准备 已安装并可以正常打开 OpenClaw Windows。 OpenClaw 顶部 Gateway 状态保持在线。 已准备好可正常登录的阿里云账号。 可以正常访问阿里云百炼登录地址:https://bailian.console.aliyun.com/cn-beijing#/home 建议提…...

Veo 2胶片质感生成器失效?——深度解析Color Science v2.3内核中被屏蔽的Cinematic Grain Injection层
更多请点击: https://kaifayun.com 第一章:Veo 2胶片质感生成器失效现象全景透视 近期大量用户反馈,Veo 2 胶片质感生成器在调用 generate_film_effect() 接口后返回空纹理、纯灰帧或 HTTP 503 Service Unavailable 错误,且该问题…...
)
CentOS服务器上VNC连接失败?手把手教你排查并修复个人端口问题(附重启命令)
CentOS服务器VNC连接故障深度排查指南:从原理到实战当你在深夜赶项目时,突然发现VNC连接不上服务器,那种焦虑感我深有体会。去年参与半导体器件仿真项目时,我也曾被这个问题困扰整整两天。本文将分享一套经过实战检验的排查方法论…...
_kaic)
ssm207基于SSM的视频播放系统的设计与实现+vue(文档+源码)_kaic
第五章 系统的实现5.1 用户功能模块的实现5.1.1系统主界面用户进入本系统可查看系统信息,系统主界面展示如图5.1所示。图5.1网站主界面5.1.2视频详情界面用户可选择视频查看视频详情信息,并可进行视频播放操作,视频详情界面展示如图5.2所示。…...

基于Cynthion逆向USB协议,为DP100电源开发Linux控制软件
1. 项目概述:用Cynthion嗅探USB,为DP100电源打造Linux软件作为一名长期在Linux环境下折腾硬件和嵌入式开发的爱好者,我经常遇到一个头疼的问题:很多不错的桌面小设备,比如电源、示波器、逻辑分析仪,它们的官…...

UE4SS终极指南:从零开始掌握虚幻引擎脚本系统
UE4SS终极指南:从零开始掌握虚幻引擎脚本系统 【免费下载链接】RE-UE4SS Injectable LUA scripting system, SDK generator, live property editor and other dumping utilities for UE4/5 games 项目地址: https://gitcode.com/gh_mirrors/re/RE-UE4SS UE4S…...

构建智能音乐档案:SoundCloud Downloader 的技术架构与实现哲学
构建智能音乐档案:SoundCloud Downloader 的技术架构与实现哲学 【免费下载链接】scdl Soundcloud Music Downloader 项目地址: https://gitcode.com/gh_mirrors/sc/scdl 在流媒体音乐主导的时代,音乐爱好者面临着一种矛盾:我们享受着…...

Cesium动态数据可视化实战:CallbackProperty结合setInterval打造实时运动轨迹
Cesium动态数据可视化实战:CallbackProperty结合setInterval打造实时运动轨迹 在三维地理信息系统中,实时数据可视化一直是开发者面临的挑战之一。想象一下,当我们需要在地球表面追踪一架正在飞行的无人机,或者监控城市中数百辆出…...

国产麒麟系统上编译GDAL 3.2.1踩坑记:从PROJ6依赖缺失到Qt环境集成
麒麟系统GDAL 3.2.1编译实战:PROJ6依赖修复与Qt工程深度集成在国产操作系统生态中部署地理数据处理工具链,往往会遇到比常规Linux发行版更复杂的依赖问题。最近在麒麟系统上为北斗定位项目编译GDAL 3.2.1时,遭遇了经典的"PROJ 6 symbols…...