【【51单片机红外遥控小风车】】
51单片机红外遥控小风车
今天结束了51单片机的学习,明天开始学习stm32
我是学习江科大的视频一步一步完成的 ,他讲的非常好,非常好 特别通俗易懂
学习复刻他的作品我也自己创作了一些
但是现在暂时脱离这块板子了
以后可能会更新一个应用51单片机制作的智能小车
我特别想开一个小车的坑 谢谢大家
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Motor.h"
#include "IR.h"unsigned char Command,Speed;void main()
{Motor_Init();IR_Init();while(1){if(IR_GetDataFlag()) //如果收到数据帧{Command=IR_GetCommand(); //获取遥控器命令码if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度if(Command==IR_1){Speed=1;}if(Command==IR_2){Speed=2;}if(Command==IR_3){Speed=3;}if(Speed==0){Motor_SetSpeed(0);} //速度输出if(Speed==1){Motor_SetSpeed(50);}if(Speed==2){Motor_SetSpeed(75);}if(Speed==3){Motor_SetSpeed(100);}}Nixie(1,Speed); //数码管显示速度}
}
Delay.c
void Delay(unsigned int xms)
{unsigned char i, j;while(xms--){i = 2;j = 239;do{while (--j);} while (--i);}
}
Delay.h
#ifndef __DELAY_H__
#define __DELAY_H__void Delay(unsigned int xms);#endif
Key.c
#include <REGX52.H>
#include "Delay.h"/*** @brief 获取独立按键键码* @param 无* @retval 按下按键的键码,范围:0~4,无按键按下时返回值为0*/
unsigned char Key()
{unsigned char KeyNumber=0;if(P3_1==0){Delay(20);while(P3_1==0);Delay(20);KeyNumber=1;}if(P3_0==0){Delay(20);while(P3_0==0);Delay(20);KeyNumber=2;}if(P3_2==0){Delay(20);while(P3_2==0);Delay(20);KeyNumber=3;}if(P3_3==0){Delay(20);while(P3_3==0);Delay(20);KeyNumber=4;}return KeyNumber;
}
Key.h
#ifndef __KEY_H__
#define __KEY_H__unsigned char Key();#endif
Nixie.c
#include <REGX52.H>
#include "Delay.h"unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};void Nixie(unsigned char Location,Number)
{switch(Location){case 1:P2_4=1;P2_3=1;P2_2=1;break;case 2:P2_4=1;P2_3=1;P2_2=0;break;case 3:P2_4=1;P2_3=0;P2_2=1;break;case 4:P2_4=1;P2_3=0;P2_2=0;break;case 5:P2_4=0;P2_3=1;P2_2=1;break;case 6:P2_4=0;P2_3=1;P2_2=0;break;case 7:P2_4=0;P2_3=0;P2_2=1;break;case 8:P2_4=0;P2_3=0;P2_2=0;break;}P0=NixieTable[Number];Delay(1);P0=0x00;
}
Nixie.h
#ifndef __NIXIE_H__
#define __NIXIE_H__void Nixie(unsigned char Location,Number);#endif
Timer1.c
#include <REGX52.H>/*** @brief 定时器1初始化,100us@12.000MHz* @param 无* @retval 无*/
void Timer1_Init(void)
{TMOD &= 0x0F; //设置定时器模式TMOD |= 0x10; //设置定时器模式TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值TF1 = 0; //清除TF1标志TR1 = 1; //定时器1开始计时ET1=1;EA=1;PT1=0;
}/*定时器中断函数模板
void Timer1_Routine() interrupt 3
{static unsigned int T1Count;TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值T1Count++;if(T1Count>=1000){T1Count=0;}
}
*/
Timer1.h
#ifndef __TIMER1_H__
#define __TIMER1_H__void Timer1_Init(void);#endif
Motor.c
#include <REGX52.H>
#include "Timer1.h"//引脚定义
sbit Motor=P1^0;unsigned char Counter,Compare;/*** @brief 电机初始化* @param 无* @retval 无*/
void Motor_Init(void)
{Timer1_Init();
}/*** @brief 电机设置速度* @param Speed 要设置的速度,范围0~100* @retval 无*/
void Motor_SetSpeed(unsigned char Speed)
{Compare=Speed;
}//定时器1中断函数
void Timer1_Routine() interrupt 3
{TL1 = 0x9C; //设置定时初值TH1 = 0xFF; //设置定时初值Counter++;Counter%=100; //计数值变化范围限制在0~99if(Counter<Compare) //计数值小于比较值{Motor=1; //输出1}else //计数值大于比较值{Motor=0; //输出0}
}
Motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__void Motor_Init(void);
void Motor_SetSpeed(unsigned char Speed);#endif
Int0.c
#include <REGX52.H>/*** @brief 外部中断0初始化* @param 无* @retval 无*/
void Int0_Init(void)
{IT0=1;IE0=0;EX0=1;EA=1;PX0=1;
}/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{}
*/
Int0.h
#ifndef __INT0_H__
#define __INT0_H__void Int0_Init(void);#endif
Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @retval 无*/
void Timer0_Init(void)
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0不计时
}/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/
void Timer0_SetCounter(unsigned int Value)
{TH0=Value/256;TL0=Value%256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0<<8)|TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0=Flag;
}
Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__void Timer0_Init(void);
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter(void);
void Timer0_Run(unsigned char Flag);#endif
IR.c
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];
unsigned char IR_pData;unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;/*** @brief 红外遥控初始化* @param 无* @retval 无*/
void IR_Init(void)
{Timer0_Init();Int0_Init();
}/*** @brief 红外遥控获取收到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
}//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>12442-500 && IR_Time<12442+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>10368-500 && IR_Time<10368+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1032-500 && IR_Time<1032+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2074-500 && IR_Time<2074+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}}
}
IR.h
#ifndef __IR_H__
#define __IR_H__#define IR_POWER 0x45
#define IR_MODE 0x46
#define IR_MUTE 0x47
#define IR_START_STOP 0x44
#define IR_PREVIOUS 0x40
#define IR_NEXT 0x43
#define IR_EQ 0x07
#define IR_VOL_MINUS 0x15
#define IR_VOL_ADD 0x09
#define IR_0 0x16
#define IR_RPT 0x19
#define IR_USD 0x0D
#define IR_1 0x0C
#define IR_2 0x18
#define IR_3 0x5E
#define IR_4 0x08
#define IR_5 0x1C
#define IR_6 0x5A
#define IR_7 0x42
#define IR_8 0x52
#define IR_9 0x4Avoid IR_Init(void);
unsigned char IR_GetDataFlag(void);
unsigned char IR_GetRepeatFlag(void);
unsigned char IR_GetAddress(void);
unsigned char IR_GetCommand(void);#endif
相关文章:

【【51单片机红外遥控小风车】】
51单片机红外遥控小风车 今天结束了51单片机的学习,明天开始学习stm32 我是学习江科大的视频一步一步完成的 ,他讲的非常好,非常好 特别通俗易懂 学习复刻他的作品我也自己创作了一些 但是现在暂时脱离这块板子了 以后可能会更新一个应用51单…...

如何连接远程服务器?快解析内内网穿透可以吗?
如今我们迎来了数字化转型的时代,众多企业来为了更好地推动业务的发展,常常需要在公司内部搭建一个远程服务器。然而,对于企业员工来说,在工作过程中经常需要与这个服务器进行互动,而服务器位于公司的局域网中…...

【云边有个小卖部】上新《探秘Linux》第三章 Linux 软件包管理器 yum
🕺作者: 主页 我的专栏C语言从0到1C初阶C进阶数据结构从0到1探秘Linux菜鸟刷题集 😘欢迎关注:👍点赞🙌收藏✍️留言 🏇码字不易,你的👍点赞🙌收藏❤️关注对我…...
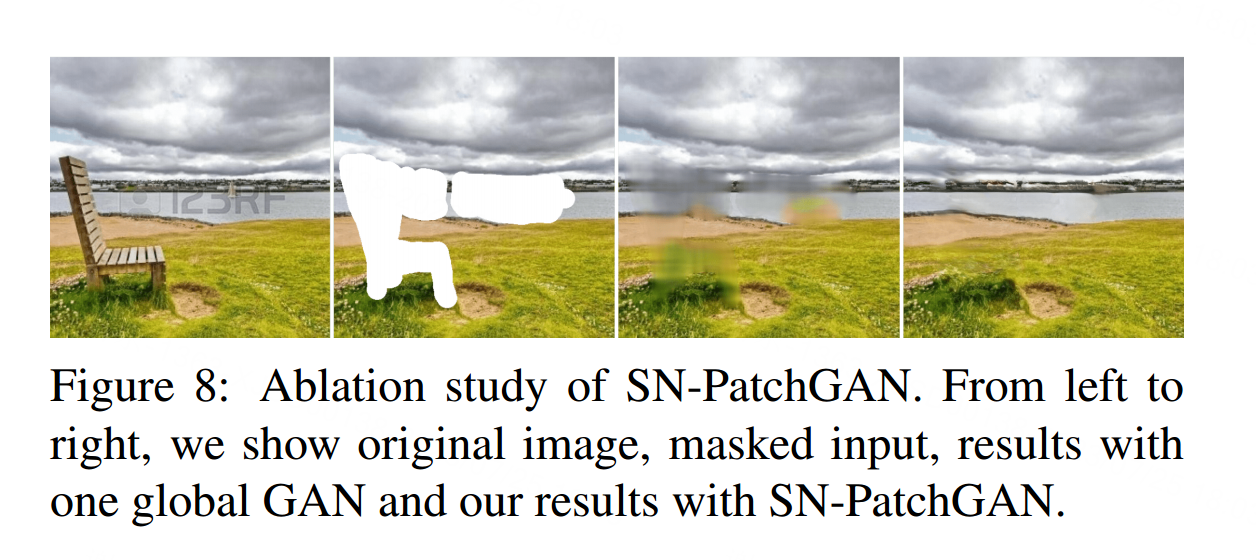
【深度学习】【Image Inpainting】Free-Form Image Inpainting with Gated Convolution
模型:DeepFillv2 (CVPR’2019) 论文:https://arxiv.org/abs/1806.03589 代码:https://github.com/JiahuiYu/generative_inpainting 文章目录 效果AbstractIntroductionRelated WorkAutomatic Image InpaintingGuided Image Inpainting and Sy…...
游戏引擎UE如何革新影视行业?创意云全面支持UE云渲染
虚幻引擎UE(Unreal Engine)作为一款“殿堂级”的游戏引擎,占据了全球80%的商用游戏引擎市场,但如果仅仅将其当做游戏开发的工具,显然是低估了它的能力。比如迪士尼出品的电视剧《曼达洛人》、电影《狮子王》等等都使用…...
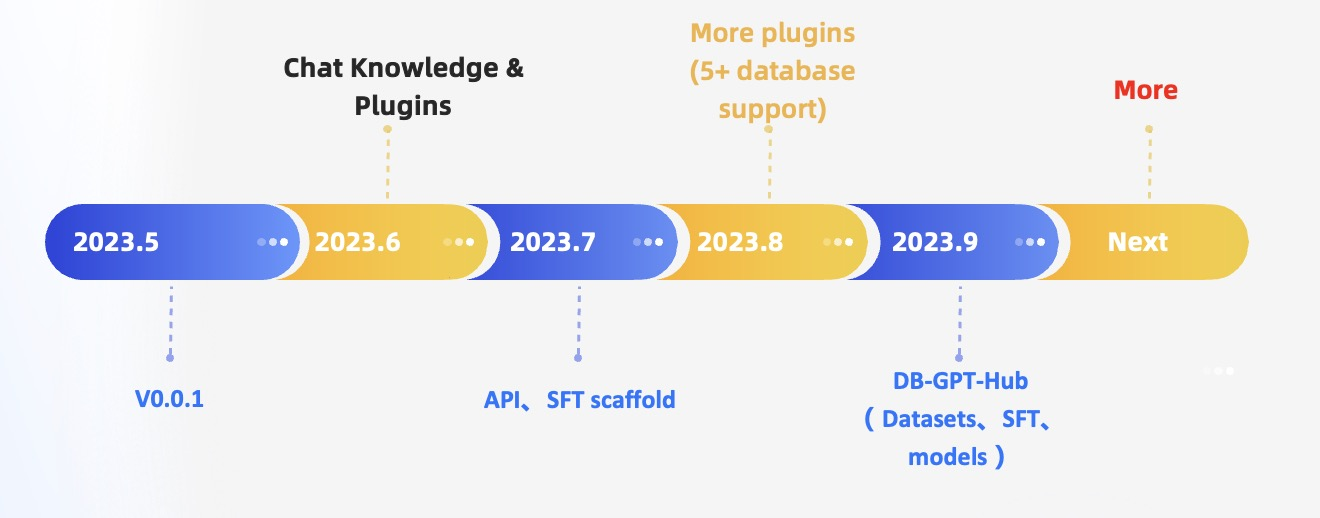
DB-GPT:强强联合Langchain-Vicuna的应用实战开源项目,彻底改变与数据库的交互方式
今天看到 蚂蚁科技 Magic 开源的DB-GPT项目,觉得创意很好,集成了当前LLM的主流技术,主要如下 Langchain: 构建在LLM之上的应用开发框架HuggingFace: 模型标准,提供大模型管理功能Vicuna: 一个令GPT-4惊艳的开源聊天机…...

STM32CubeMX v6.9.0 BUG:FLASH_LATENCY设置错误导致初始化失败
背景 今天在调试外设功能时,发现设置了使用外部时钟之后程序运行异常,进行追踪调试并与先前可以正常运行的项目进行对比之后发现这个问题可能是由于新版本的STM32CubeMX配置生成代码时的BUG引起的。 测试环境 MCU: STM32H750VBT6 STM32CubeIDE: Versi…...
K8s-资源管理(二)
文章目录 2. 资源管理2.1 资源管理介绍2.2 YAML语言介绍2.3 资源管理方式2.3.1 命令式对象管理2.3.2 命令式对象配置2.3.3 声明式对象配置 2.4. 模拟使用普通用户来操作2.5 kubectl 一些基本命令2.6 使用个人的 docker 仓库的镜像 2. 资源管理 2.1 资源管理介绍 在kubernetes…...
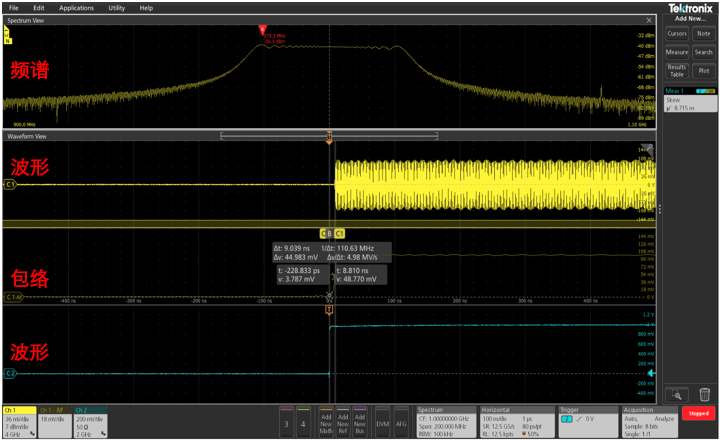
脉冲信号测试应如何选择示波器带宽?
示波器模拟带宽的定义大家都比较熟悉,是针对于正弦波信号定义的。从频域上看,正弦波信号的频谱就是单根谱线,只要示波器的带宽不小于信号的频率,那么就可以有效观测到波形。若要追求更高的幅度测试精度,则可以按照5倍法…...

OpenCV DNN模块推理YOLOv5 ONNX模型方法
文章目录 概述1. 环境部署YOLOv5算法ONNX模型获取opencv-python模块安装 2.关键代码2.1 模型加载2.2 图片数据预处理2.3 模型推理2.4 推理结果后处理2.4.1 NMS2.4.2 score_threshold过滤2.4.3 bbox坐标转换与还原 3. 示例代码(可运行)3.1 未封装3.2 封装成类调用 概述 本文档主…...
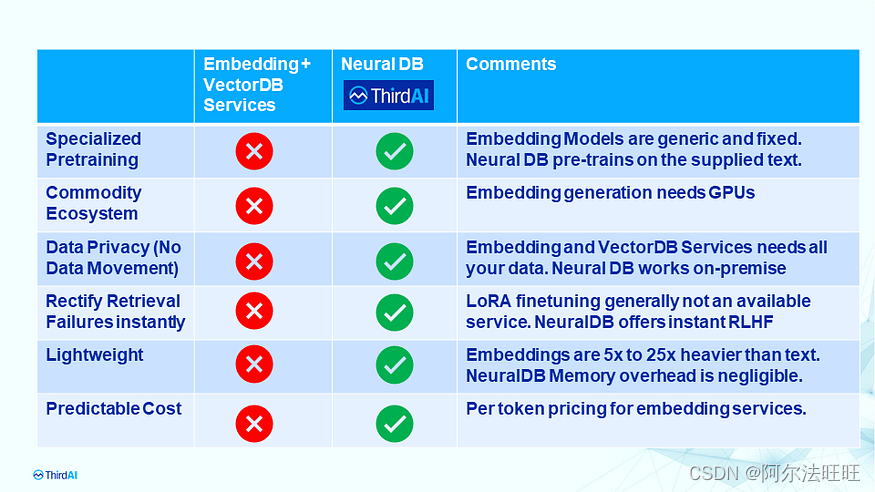
ThirdAI 的私有和可个性化神经数据库:增强检索增强生成(第 3/3 部分)
这是我们关于使用检索增强生成构建 AI 代理的系列的最后一章 (3/3)。在第 1/3 部分中,我们讨论了断开连接的嵌入和基于矢量的检索管道的局限性。在第 2/3 部分中,我们介绍了神经数据库,它消除了存储和操作繁重且昂贵的…...

C# 解决TCP Server 关不掉客户端连接的问题
问题描述 拷贝了一段 TCP Server的应用代码,第一次运行正常,但是关闭软件或者实现disconnectclose后都无法关闭端口连接。 关闭之后,另外一个客户端还在正常与PC连接。 TCP Server 重新运行,无法接收到客户端的连接。 复现环境…...
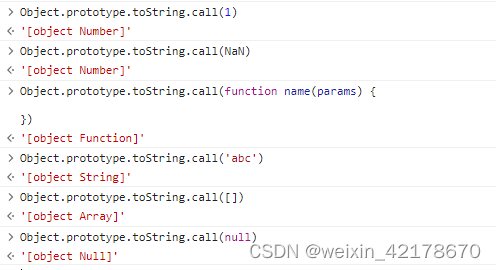
JS判断类型的方法和对应的局限性(typeof、instanceof和Object.prototype.toString.call()的用法)
JS判断类型的方法和对应的局限性(typeof、instanceof和Object.prototype.toString.call()的用法) 一、typeof 返回: 该方法返回小写字符串表示检测数据属于什么类型,例如: 检测函数返回function 可判断的数据类型:…...

mongostat跟踪Mongodb运行的状态
版本控制 从 MongoDB 4.4 开始,mongostat 现在与 MongoDB 服务器分开发布,并使用自己的版本控制,初始版本为100.0.0. 之前, mongostat 与 MongoDB Server 一起发布并使用匹配的版本控制。 兼容性 mongostat 版本100.7.3支持以下…...

华为数通HCIA-数通网络基础
基础概念 通信:两个实体之间进行信息交流 数据通信:网络设备之间进行的通信 计算机网络:实现网络设备之间进行数据通信的媒介 园区网络(企业网络)/私网/内网:用于实现园区内部互通,并且需要部…...
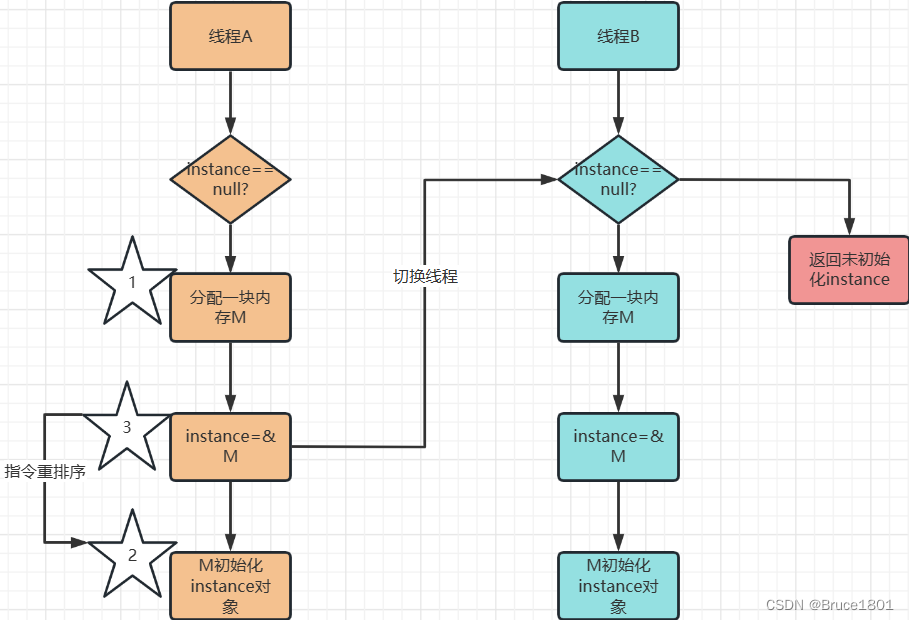
【设计模式】详解单例设计模式(包含并发、JVM)
文章目录 1、背景2、单例模式3、代码实现1、第一种实现(饿汉式)为什么属性都是static的?2、第二种实现(懒汉式,线程不安全)3、第三种实现(懒汉式,线程安全)4、第四种实现…...
监控和可观察性在 DevOps 中的作用!
在不断发展的DevOps世界中,深入了解系统行为、诊断问题和提高整体性能的能力是首要任务之一。监控和可观察性是促进这一过程的两个关键概念,为系统的健康状况和性能提供有价值的可见性。虽然这些术语经常互换使用,但它们代表了理解和管理复杂…...
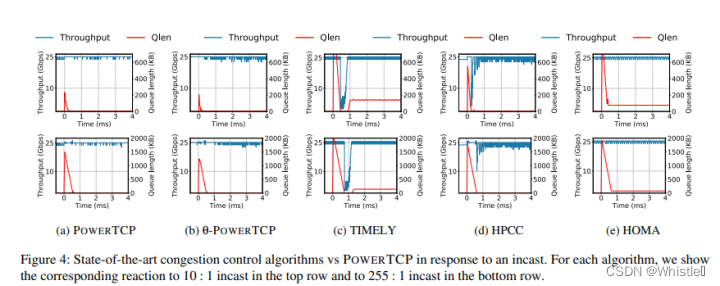
论文分享:PowerTCP: Pushing the Performance Limits of Datacenter Networks
1 原论文的题目(中英文)、题目中包含了哪些关键词?这些关键词的相关知识分别是什么? 题目:PowerTCP: Pushing the Performance Limits of Datacenter Networks PowerTCP:逼近数据中心的网络性能极限 2 论…...
浏览器的同源策略 - 跨域问题
1.什么是跨域 跨域问题的实质是浏览器的同源策略造成的。浏览器同源策略是浏览器为 JavaScript 施加的限制。简单点说就是非同源会出现如下等限制: 无法访问其他源下的网页的 Cookies,Storage等;无法访问其他源下的DOM对象和 JS 对象;无法使…...
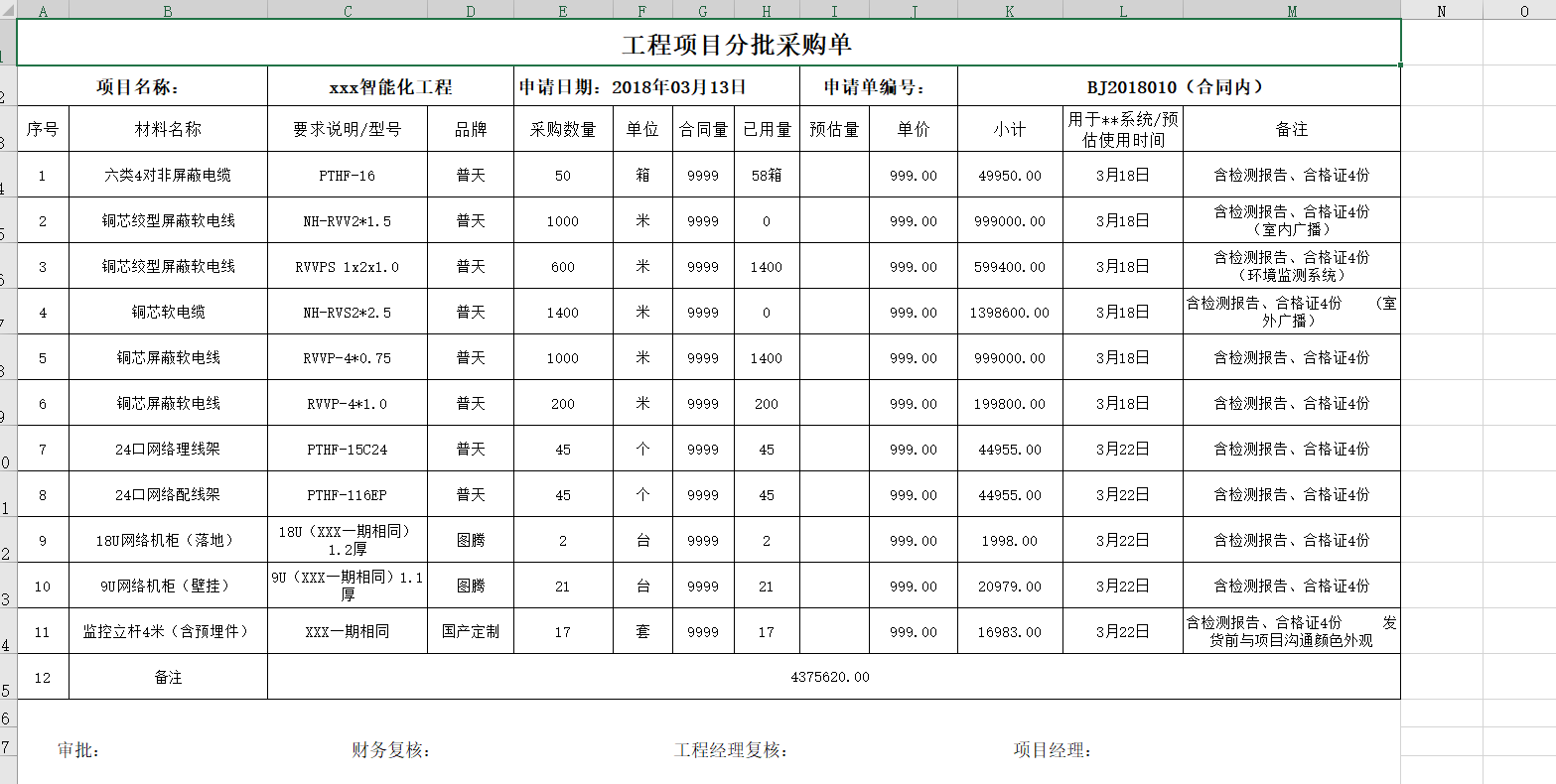
go 查询采购单设备事项[小示例]V2-两种模式{严格,包含模式}
第一版: https://mp.csdn.net/mp_blog/creation/editor/131979385 第二版: 优化内容: 检索数据的两种方式: 1.严格模式--找寻名称是一模一样的内容,在上一个版本实现了 2.包含模式,也就是我输入检索关…...

Taurus多执行器对比实战:JMeter/Gatling/Locust统一压测方案
1. 为什么选Taurus做多执行器对比——不是为了炫技,而是为了少踩坑在性能测试领域,我见过太多团队卡在“选型”这一步:刚招来一个会写JMeter脚本的工程师,项目突然要压测WebSocket接口,发现JMeter原生支持弱、插件维护…...

物理引导的机器学习工作流:气候建模的融合创新与实践
1. 项目概述:当气候建模遇见机器学习如果你像我一样,在气候模拟这个领域摸爬滚打超过十年,就会深刻体会到一种“甜蜜的负担”:我们构建的地球系统模型(ESM)越来越精细,物理过程越来越复杂&#…...

作业本耐用度差距巨大?深圳大明印刷厂拆解合规工艺,告别定制作业本掉页开裂通病
在校园日常教学中,很多学校都会遇到同一个难题:同一学期采购的作业本、定制作业本,品质差距悬殊,有的完好无损用到期末,有的短短几周就出现书脊开裂、页面脱落、边角破损、翻页卡顿等问题。不少人误以为是学生使用习惯…...

Python开发者首次使用Taotoken接入大模型API的完整步骤指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Python开发者首次使用Taotoken接入大模型API的完整步骤指南 对于Python开发者而言,接入大模型API进行应用开发已成为一…...

ARM架构CONSTRAINED UNPREDICTABLE行为解析与应对
1. ARM架构中的CONSTRAINED UNPREDICTABLE行为解析在处理器架构设计中,UNPREDICTABLE行为通常指架构规范未明确定义的执行结果,可能导致不可预期的系统状态。ARM架构通过引入CONSTRAINED UNPREDICTABLE机制,将这类行为限制在特定范围内&#…...

Python基础语法:常用内置函数
round():四舍五入 # 省略 ndigits print(round(3.14)) # 输出 3(int) print(round(3.66)) # 输出 4# 指定 ndigits print(round(3.14159, 2)) # 输出 3.14(float) print(round(3.666, 2)) # 输出 3.67# …...

量子软件测试的挑战与优化策略
1. 量子软件测试的挑战与机遇量子计算正在从实验室走向实际应用,随之而来的是对可靠量子软件的需求激增。与传统软件不同,量子程序面临三大独特挑战:首先,量子态的叠加性和纠缠性使得测试变得异常复杂。一个n量子比特系统可以同时…...

我靠这个测试设计方法,把漏测率降低了80%
当“直觉测试”撞上南墙很长一段时间里,我和许多测试同行一样,测试用例的设计主要依靠两样东西:需求文档和“测试直觉”。这种模式在业务逻辑相对简单、迭代速度平缓时还能勉强应付。一旦面对复杂的企业级应用、高频的敏捷迭代,或…...

简单学习 --> SSE
我们使用AI时,AI对我们说的话不会一次性把全部内容弹出来,而是会像流水一样,一点点吐出来,那么这种丝滑的交互体验,背后的核心就是 SSE (Server-Sent Events)。 什么是 SSE? SSE(Server-Sent …...

约束感知图缩减算法在量子优化中的应用
1. 约束感知图缩减算法概述在量子计算领域,资源受限一直是制约算法实际应用的主要瓶颈。以当前主流的超导量子计算机为例,其量子比特数通常在50-100个之间,且存在显著的噪声干扰。这种硬件限制使得许多经典优化问题难以直接映射到量子设备上求…...