STM32 旋转编码器
旋转编码器简介
旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向
类型:机械触点式/霍尔传感器式/光栅式
硬件电路


接线图:

代码配置
这里的中断配置与上一章的对射式红外传感器配置一样,只需要改一下引脚,以及通道配置,这里配置了两个引脚,所以需要配置两个中断通道(NVIC),写两个中断函数。
void Encoder_init(void)
{//------------------------定义结构体变量-----------------------------------GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO结构体变量EXTI_InitTypeDef EXTI_InitStructure; //定义EXTI结构体变量NVIC_InitTypeDef NVIC_InitStructure; //定义NVIC结构体变量RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启GPIO的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //开启AFIO的时钟//---------------------GPIO配置--------------------------------------GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //模式选择上拉输入GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; //配置引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速率GPIO_Init(GPIOB,&GPIO_InitStructure); //GPIO初始化//---------------------GPIO配置--------------------------------------GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource0);//将中断线与GPIO引脚连接GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource1);//将中断线与GPIO引脚连接//---------------------EXTI配置--------------------------------------EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; //配置中断线EXTI_InitStructure.EXTI_LineCmd = ENABLE; //中断使能EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //选择中断模式EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//下降沿触发EXTI_Init(&EXTI_InitStructure);//---------------------EXTI配置--------------------------------------NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//中断分组,这里放到模块函数里了,一般情况放在主函数第一行(如上一章按键中断)//---------------------NVIC配置--------------------------------------NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //选择中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级配置NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级配置NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; //选择中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级配置NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //响应优先级配置NVIC_Init(&NVIC_InitStructure);//---------------------NVIC配置--------------------------------------}
中断函数:
中断函数编程:在中断函数里,不要执行耗时过长的代码,中断函数要简短快速最好不要用delay函数,因为中断时处理突发事情的,如果为了突发的事情在中断函数呆着出不来了,主程序就会收到严重的阻塞
int16_t Encoder_Count;
//返回数据
int16_t Encoder_Get(void)
{return Encoder_Count;}//中断函数
void EXTI0_IRQHandler(void)
{//判断中断是否触发if(EXTI_GetITStatus(EXTI_Line0) == SET){if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1) == 0){Encoder_Count--;}//清除标志位EXTI_ClearITPendingBit(EXTI_Line0);}
}void EXTI1_IRQHandler(void)
{//判断中断是否触发if(EXTI_GetITStatus(EXTI_Line1) == SET){if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0) == 0){Encoder_Count++;}//清除标志位EXTI_ClearITPendingBit(EXTI_Line1);}}主函数:
#include "Encoder.h"
int main(void)
{LED_Init();OLED_Init();Encoder_init();OLED_ShowString(1, 3, "Num:");while(1){OLED_ShowSignedNum(1, 6, Encoder_Get(), 5);} }
相关文章:
STM32 旋转编码器
旋转编码器简介 旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向 类型:机械触点式/霍尔传…...

大模型领域的Scaling Law的含义及作用
Scaling Law就像是一个“长大公式”,用来预测当一个东西(比如模型)变大(比如增加参数、数据量)时,它的性能(比如准确率)会怎么变化。 它能帮助我们提前知道,增加多少资源…...

从 C 到 C++:理解结构体中字符串的存储与操作
对于刚入门 C/C 的程序员来说,字符串的存储和操作可能是个容易混淆的知识点。在 C 中,std::string 提供了非常友好的接口,我们可以轻松地在结构体中使用字符串类型,无需关注底层细节。然而,在 C 语言中,字符…...

git基础使用--4---git分支和使用
文章目录 git基础使用--4---git分支和使用1. 按顺序看2. 什么是分支3. 分支的基本操作4. 分支的基本操作4.1 查看分支4.2 创建分支4.3 切换分支4.4 合并冲突 git基础使用–4—git分支和使用 1. 按顺序看 -git基础使用–1–版本控制的基本概念 -git基础使用–2–gti的基本概念…...

【算法】回溯算法专题③ ——排列型回溯 python
目录 前置小试牛刀回归经典举一反三总结 前置 【算法】回溯算法专题① ——子集型回溯 python 【算法】回溯算法专题② ——组合型回溯 剪枝 python 小试牛刀 全排列 https://leetcode.cn/problems/permutations/description/ 给定一个不含重复数字的数组 nums ,返…...

Vue2.x简介
Vue2.x简介 Vue2.x的版本介绍Vue2.x的两大组件库 Vue2.x的版本介绍 Vue2.x是vue.js的第二个主要版本,最初版发布于2016 年,最终版发布于2023年12月24日(版本号:2.7.16,版本名:Swan Song(绝唱&a…...

FFmpeg:多媒体处理的瑞士军刀
FFmpeg:多媒体处理的瑞士军刀 前言 FFmpeg 是一个功能强大且跨平台的开源多媒体框架,广泛应用于音视频处理领域。 它由多个库和工具组成,能够处理各种音视频格式,涵盖编码、解码、转码、流处理等多种操作。 无论是专业视频编辑…...

Windows编译FreeRDP步骤
1. **安装必要工具** powershell # 安装 Visual Studio 2022 (勾选"C桌面开发"组件) # 安装 CMake: https://cmake.org/download/ # 安装 Git: https://git-scm.com/ 2. **安装依赖项** powershell # 使用vcpkg包管理 git clone https://github.com/Microsoft/vcpk…...

机器学习--学习计划
3周机器学习速成计划 基于「28原则」,聚焦机器学习20%的核心概念,覆盖80%的常见应用场景。计划分为 理论学习 项目实战,每周学习后通过5个递进项目巩固知识。 📅 第1周:数据与监督学习基础 学习目标:掌握…...

【深度分析】DeepSeek大模型技术解析:从架构到应用的全面探索
深度与创新:AI领域的革新者 DeepSeek,这个由幻方量化创立的人工智能公司推出的一系列AI模型,不仅在技术架构上展现出了前所未有的突破,更在应用领域中开启了无限可能的大门。从其混合专家架构(MoE)到多头潜…...

conda配置channel
你收到 CondaKeyError: channels: value https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main not present in config 错误是因为该镜像源(https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main)可能没有被正确添加到 Conda 的配置文件中&…...

wordpress每隔24小时 随机推荐一个指定分类下的置顶内容。
在WordPress中实现每隔24小时随机推荐一个指定分类下的置顶内容,可以通过以下步骤实现: 1. 创建自定义函数 在主题的functions.php文件中添加以下代码,用于创建一个定时任务,每隔24小时随机选择一个置顶文章并存储到选项中&…...

python学opencv|读取图像(五十五)使用cv2.medianBlur()函数实现图像像素中值滤波处理
【1】引言 在前述学习过程中,已经探索了取平均值的形式进行图像滤波处理。 均值滤波的具体的执行对象是一个nXn的像素核,对这个像素核内所有像素点的BGR值取平均值,然后把这个平均的BGR值直接赋给像素核中心位置的核心像素点,由…...

OpenAI 再战机器人领域,重组机器人团队
OpenAI重组机器人团队?大家是不是和小编一样,听到这个消息后,脑子里瞬间浮现出科幻电影里机器人满街跑的场景?今天咱们就来看看背后的故事吧~ 作为人工智能领域的领头羊,OpenAI一直以来都在探索和扩展AI技术的深度和广…...

Turing Complete-1位开关
要求如下: 我的思考: 把输入1当作控制信号,把输入2当作输出信号。 通过非门和开关使输入2形成双通道输出, 通道一为输出输入2取反。 通道二为输出输入2本身。 通过输入1来控制两个通道的开闭。...

预防和应对DDoS的方法
DDoS发起者通过大量的网络流量来中断服务器、服务或网络的正常运行,通常由多个受感染的计算机或联网设备(包括物联网设备)发起。 换种通俗的说法,可以将其想象成高速公路上的一次突然的大规模交通堵塞,阻止了正常的通勤…...

树莓派pico入坑笔记,睡眠
关于树莓派pico和circuitpython的更多玩法,请看树莓派pico专栏 关于在 CircuitPython 中使用警报和浅/深度睡眠的更多信息,请参阅此学习指南。 树莓派pico支持浅睡眠和深度睡眠,其中深度睡眠唤醒后将从boot.py开始运行 支持按时间唤醒和引…...
设计与实战)
高并发、高可用的消息队列(MQ)设计与实战
目录 背景与历史消息队列的核心功能高并发、高可用的业务场景消息队列的实用性企业规模与消息队列的选择Java实战案例:基于RabbitMQ的高并发、高可用消息队列 6.1 环境准备6.2 RabbitMQ的安装与配置6.3 Java客户端集成6.4 生产者与消费者实现6.5 高并发处理6.6 高可…...

数据库 - Sqlserver - SQLEXPRESS、由Windows认证改为SQL Server Express认证进行连接 (sa登录)
本文讲SqlServer Express版本在登录的时候, 如何由Windows认证,修改为Sql Server Express认证。 目录 1,SqlServer Express的Windows认证 2,修改为混合认证 3,启用sa 用户 4,用sa 用户登录 下面是详细…...

二分基础两道
Leetcode704: 给定一个 n 个元素有序的(升序)整型数组 nums 和一个目标值 target ,写一个函数搜索 nums 中的 target,如果目标值存在返回下标,否则返回 -1。 示例 1: 输入: nums [-1,0,3,5,9,12], target 9 输出:…...

编程AI深度实战:AI编程工具哪个好? Copilot vs Cursor vs Cody vs Supermaven vs Aider
系列文章: 编程AI深度实战:私有模型deep seek r1,必会ollama-CSDN博客 编程AI深度实战:自己的AI,必会LangChain-CSDN博客 编程AI深度实战:给vim装上AI-CSDN博客 编程AI深度实战:火的编程AI,都在用语法树(AST)-CSDN博客 编程AI深度实战:让verilog不再是 AI …...

鸿蒙HarmonyOS Next 视频边播放边缓存- OhosVideoCache
OhosVideoCache 是一个专为OpenHarmony开发(HarmonyOS也可以用)的音视频缓存库,旨在帮助开发者轻松实现音视频的边播放边缓存功能。以下是关于 OhosVideoCache 的详细介绍: 1. 核心功能 边播放边缓存:将音视频URL传递给 OhosVideoCache 处理后…...

中间件漏洞之CVE-2024-53677
目录 什么是struts?CVE-2024-53677简介影响版本复现环境搭建漏洞利用修复 什么是struts? 在早期的 Java Web 开发中,代码往往混乱不堪,难以维护和扩展。比如,一个简单的用户登录功能,可能在不同的 Java 类…...

Python玄学
过年期间无聊的看了看DY直播,也是迷上玄学了。突然想着为啥要自己掐指算,我这🐷脑哪记得到那么多东西啊。然后,就捣鼓捣鼓了一些玩意儿。留个纪念。 注:就是一个玄学推动学习,部分内容不必当真,…...

16.1.STM32F407ZGT6-CAN基础概念
参考: https://blog.csdn.net/sunlight_vip/article/details/128639144 前言: 学习总结CAN的知识点: 1.can是什么,历史由来和背景 2.can的物理层,链路层 3.初始化的流程和关键点 4.波特率怎么设置 5.can id怎么过滤 6…...

记忆化搜索和动态规划 --最长回文子串为例
记忆化搜索 记忆化搜索是一种优化递归算法的方法,通过将已经计算过的子问题的结果存储起来(通常使用哈希表或数组),避免重复计算相同的子问题。 本质上是通过缓存中间结果来减少计算的重复性。 动态规划 动态规划是通过将问题分…...

【论文笔记】Fast3R:前向并行muti-view重建方法
众所周知,DUSt3R只适合做稀疏视角重建,与sapnn3r的目的类似,这篇文章以并行的方法,扩展了DUSt3R在多视图重建中的能力。 abstract 多视角三维重建仍然是计算机视觉领域的核心挑战,尤其是在需要跨不同视角实现精确且可…...
)
cf div3 998 E(并查集)
E : 给出两个简单无向图 (没有重边和自环)f g . 可以对f 进行 删边 和加边 的操作。问至少操作多少次 ,使得 f 和 g 的 点的联通情况相同(并查集的情况相同) 首先思考删边 : 对于 我 f 图存在边 e &#x…...
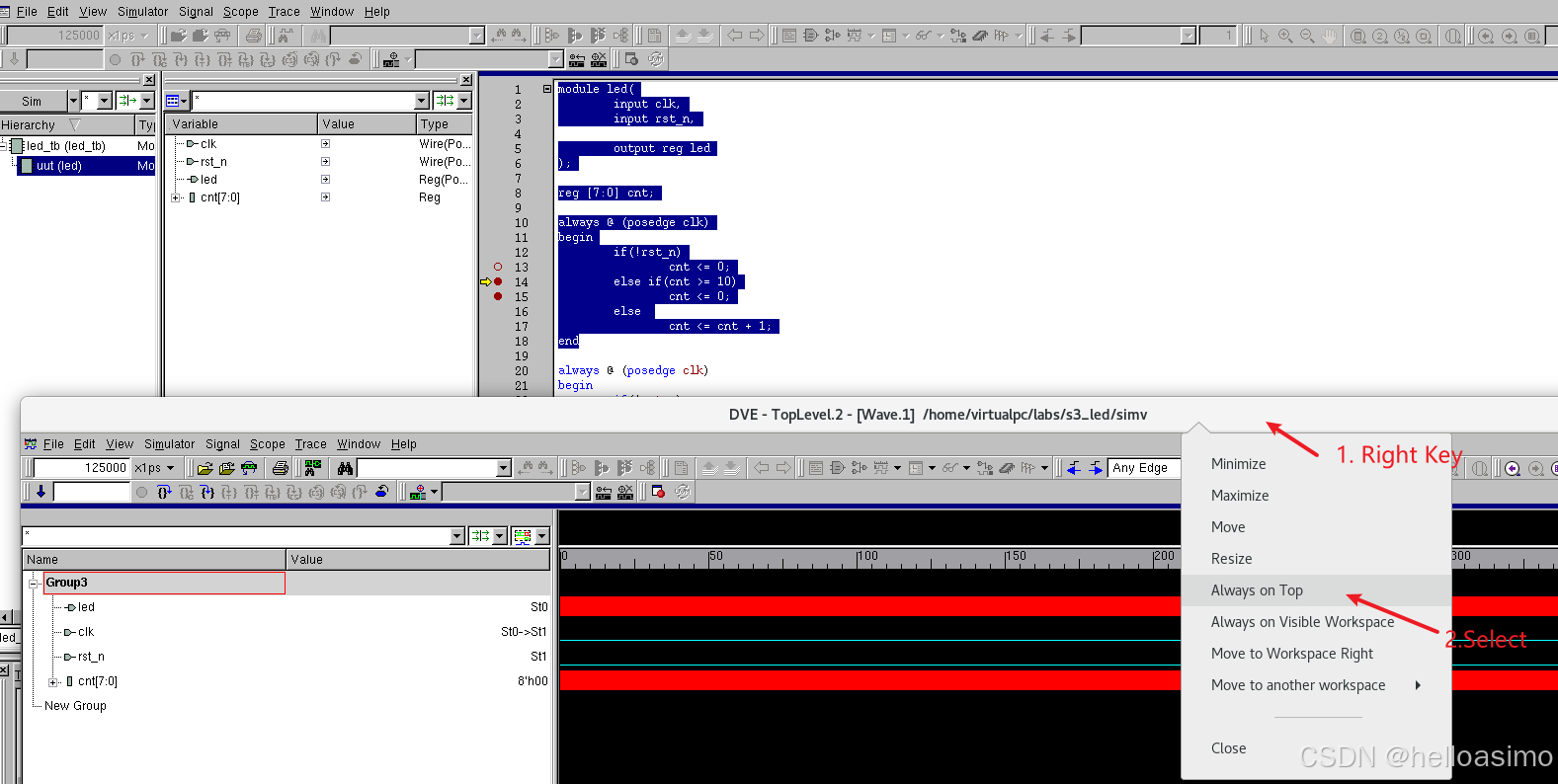
使用VCS对Verilog/System Verilog进行单步调试的步骤
Verilog单步调试: System Verilog进行单步调试的步骤如下: 1. 编译设计 使用-debug_all或-debug_pp选项编译设计,生成调试信息。 我的4个文件: 1.led.v module led(input clk,input rst_n,output reg led );reg [7:0] cnt;alwa…...

Pyside6异步通信测试
#第一种方式,借助qasync实现。使用pip install qasync安装。 from PySide6.QtWidgets import * from PySide6.QtCore import * from PySide6.QtGui import * import asyncio from qasync import QEventLoop, asyncSlotclass Form(QWidget):def __init__(self,paren…...