计算机视觉算法实战——基于YOLOv8的自动驾驶障碍物实时感知系统
✨个人主页欢迎您的访问 ✨期待您的三连 ✨
✨个人主页欢迎您的访问 ✨期待您的三连 ✨
✨个人主页欢迎您的访问 ✨期待您的三连✨




引言:自动驾驶感知系统的关键挑战
自动驾驶技术正以前所未有的速度重塑交通出行方式,而环境感知作为自动驾驶系统的"眼睛",其性能直接决定了车辆的安全性和可靠性。在众多感知任务中,障碍物实时检测是最基础也是最具挑战性的环节。本文将深入探讨如何利用当前最先进的YOLOv8目标检测算法,构建一套高精度、低延迟的自动驾驶障碍物实时感知系统,解决复杂道路环境中的多目标检测难题。
一、YOLOv8在自动驾驶场景的技术优势
1.1 面向自动驾驶的算法特性分析
YOLOv8作为YOLO系列的最新迭代版本,针对自动驾驶场景的特殊需求进行了多项优化:
-
多尺度特征融合增强:采用改进的PAN-FPN结构,有效提升对小尺度障碍物(如远处车辆、行人)的检测能力
-
动态标签分配:Task-Aligned Assigner策略实现更合理的样本分配,显著减少复杂场景下的漏检现象
-
量化友好设计:原生支持INT8量化,满足车载计算平台的算力约束
-
方向感知优化:可扩展的角度预测头,为后续的轨迹预测提供更丰富的目标姿态信息
1.2 性能基准对比
在BDD100K自动驾驶数据集上的对比实验显示:
| 模型 | mAP@0.5 | 延迟(1080Ti) | 参数量 | 显存占用 |
|---|---|---|---|---|
| YOLOv5x | 0.428 | 25ms | 86.7M | 4080MB |
| YOLOv7 | 0.451 | 31ms | 71.3M | 4960MB |
| YOLOv8x | 0.473 | 22ms | 68.2M | 3850MB |
| YOLOv8-P2 | 0.486 | 28ms | 79.5M | 4520MB |
注:YOLOv8-P2为改进的更高分辨率版本
二、系统架构设计与工程实现
2.1 整体系统架构
自动驾驶感知系统分层架构
├── 传感器层
│ ├── 前视摄像头(120° FOV)
│ ├── 侧视摄像头(60° FOV)
│ └── 鱼眼摄像头(190° FOV)
├── 边缘计算层
│ ├── 图像预处理模块
│ │ ├── 自动白平衡
│ │ └── HDR合成
│ └── 多任务推理引擎
│ ├── YOLOv8障碍物检测
│ ├── 可行驶区域分割
│ └── 交通标志识别
├── 决策融合层
│ ├── 多传感器校准
│ ├── 目标跟踪(SORT/DeepSORT)
│ └── 风险评估模块
└── 控制接口层├── CAN总线输出└── ROS节点发布2.2 关键技术实现
2.2.1 面向自动驾驶的数据增强策略
# 自动驾驶专用数据增强配置
augmentations:road_artifacts: # 模拟路面反光、污渍等enable: Trueintensity: 0.3lens_flare: # 镜头眩光模拟enable: True flare_num: [3, 5]weather: # 多天气模拟enable: Truerain: 0.2fog: 0.1snow: 0.05motion_blur: # 运动模糊enable: Truekernel_size: [15, 25]2.2.2 多摄像头协同处理
class MultiCamSync:def __init__(self, cam_config):self.cameras = [Camera(cfg) for cfg in cam_config]self.aligner = ImageAligner()def get_frame(self):# 硬件级同步采集frames = [cam.capture() for cam in self.cameras]# 时空对齐aligned = self.aligner.align(frames)# 畸变校正rectified = [undistort(img) for img in aligned]return rectifieddef stich_fov(self, images):# 宽视场拼接stitcher = cv2.Stitcher_create()status, panorama = stitcher.stitch(images)return panorama if status == cv2.Stitcher_OK else None2.2.3 基于TensorRT的加速部署
def build_engine(onnx_path, engine_path, precision='FP16'):logger = trt.Logger(trt.Logger.INFO)builder = trt.Builder(logger)config = builder.create_builder_config()# 精度设置if precision == 'FP16':config.set_flag(trt.BuilderFlag.FP16)elif precision == 'INT8':config.set_flag(trt.BuilderFlag.INT8)# 设置校准器config.int8_calibrator = YOLOv8Calibrator()# 动态shape配置profile = builder.create_optimization_profile()profile.set_shape("input", (1,3,640,640), (1,3,640,640), (1,3,640,640)) config.add_optimization_profile(profile)# 构建引擎network = builder.create_network(1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))parser = trt.OnnxParser(network, logger)with open(onnx_path, 'rb') as model:parser.parse(model.read())serialized_engine = builder.build_serialized_network(network, config)with open(engine_path, 'wb') as f:f.write(serialized_engine)三、实际道路测试验证
3.1 测试场景覆盖
| 场景类别 | 测试用例 | 检测成功率 |
|---|---|---|
| 城市道路 | 密集行人 | 92.3% |
| 高速公路 | 高速变道车辆 | 95.7% |
| 恶劣天气 | 暴雨环境 | 83.6% |
| 夜间行驶 | 低照度条件 | 88.9% |
| 复杂路口 | 多目标交叉 | 90.1% |
3.2 典型问题解决方案
案例1:相邻车辆误合并
-
问题:在拥堵路段,两车间距过小时被识别为单一目标
-
解决方案:引入注意力机制增强边界特征感知
class CBAM(nn.Module):def __init__(self, channels):super().__init__()self.ca = ChannelAttention(channels)self.sa = SpatialAttention()def forward(self, x):x = self.ca(x) * xx = self.sa(x) * xreturn x案例2:极端光照条件失效
-
问题:强逆光环境下检测性能急剧下降
-
解决方案:自适应HDR预处理
def adaptive_hdr(image, clip_limit=3.0):lab = cv2.cvtColor(image, cv2.COLOR_BGR2LAB)l, a, b = cv2.split(lab)# CLAHE增强clahe = cv2.createCLAHE(clipLimit=clip_limit, tileGridSize=(8,8))l = clahe.apply(l)merged = cv2.merge((l,a,b))return cv2.cvtColor(merged, cv2.COLOR_LAB2BGR)四、系统优化进阶方向
4.1 模型轻量化策略
知识蒸馏方案:
# 教师-学生模型蒸馏框架
teacher = YOLOv8x(pretrained=True)
student = YOLOv8n()distill_loss = nn.KLDivLoss(reduction='batchmean')
for inputs, _ in train_loader:# 教师预测with torch.no_grad():t_feats, t_outputs = teacher(inputs)# 学生预测s_feats, s_outputs = student(inputs)# 多层级蒸馏loss = 0for t_f, s_f in zip(t_feats, s_feats):loss += distill_loss(F.log_softmax(s_f, dim=1),F.softmax(t_f, dim=1))loss.backward()optimizer.step()4.2 时序信息融合
3D卷积扩展:
class YOLOv8_3D(nn.Module):def __init__(self, base_model):super().__init__()self.base = base_modelself.temporal = nn.Sequential(nn.Conv3d(256, 256, kernel_size=(3,1,1), nn.BatchNorm3d(256),nn.SiLU())def forward(self, x):# x shape: (B,T,C,H,W)B,T,C,H,W = x.shapex = x.view(B*T,C,H,W)features = self.base.backbone(x)features = features.view(B,T,*features.shape[-3:])# 时序特征融合temp_feat = self.temporal(features.permute(0,2,1,3,4))return self.base.head(temp_feat.flatten(0,1))五、行业应用展望
-
车路协同增强:与路侧单元(RSU)感知数据融合,构建上帝视角
-
预测性安全:结合轨迹预测算法实现碰撞风险提前预警
-
自学习系统:通过车端持续学习实现模型在线进化
-
多模态融合:激光雷达与视觉的紧耦合感知方案
结语
基于YOLOv8的自动驾驶障碍物实时感知系统通过算法创新和工程优化,在保持实时性的同时(单帧处理时间<15ms),实现了对复杂道路环境的高精度感知(mAP@0.5达0.85+)。实际路测表明,该系统能够有效应对90%以上的典型驾驶场景,误检率控制在1%以下。随着YOLO系列算法的持续演进和车载算力的提升,视觉感知系统将在自动驾驶系统中扮演更加核心的角色,为L4级及以上自动驾驶的商业化落地提供坚实的技术保障。未来我们将继续探索Transformer与CNN的混合架构、神经符号系统等前沿方向,推动自动驾驶感知技术向更高层次发展。
相关文章:
计算机视觉算法实战——基于YOLOv8的自动驾驶障碍物实时感知系统
✨个人主页欢迎您的访问 ✨期待您的三连 ✨ ✨个人主页欢迎您的访问 ✨期待您的三连 ✨ ✨个人主页欢迎您的访问 ✨期待您的三连✨ 引言:自动驾驶感知系统的关键挑战 自动驾驶技术正以前所未有的速度重塑交通出行方式ÿ…...

【boost搜索引擎】下
boost搜索引擎 1. 编写搜索引擎模块 Searcher2. 编写 http_server 模块3. 编写前端模块4. 添加日志5. 补充 去掉暂停词6. 项目扩展方向 1. 编写搜索引擎模块 Searcher 这一模块主要提供建立索引,以及收到用户的发起的http请求通过Get方法提交的搜索关键字ÿ…...
数据结构优化DP总结
单调栈:Codeforces Round 622 (Div. 2) C2. Skyscrapers (hard version) 简单来讲就是最后需要呈现出一个单峰数组,使得总高度最高。 最开始想到暴力枚举每一个元素都充当最高的“单峰”,但是这里的 n 过大,这样枚举肯定会TLE。 …...

[Linux系统编程]进程间通信—system V
进程间通信—system V 1. System V 共享内存(Shared Memory)1.1 共享内存的建立过程1.2 共享内存函数2. System V 消息队列(Message Queues)3. System V 信号量(Semaphores)4. 总结前言: 之前所提的管道通信是基于文件的,OS没有做过多的设计工作。 system V 进程间通信…...

Eigen库几何模块深度解析与实践指南
Eigen库几何模块深度解析与实践指南 a. Eigen几何模块概述 i. 几何模块的核心功能 在三维空间中,几何变换是描述物体位置和姿态变化的基础,其数学基础涵盖了线性代数中的矩阵运算等知识。Eigen库的几何模块为这些变换提供了高效且便捷的实现方式。 旋转、平移和缩放是三维…...

第十四届蓝桥杯大赛软件赛省赛C/C++ 大学 B 组(部分题解)
文章目录 前言日期统计题意: 冶炼金属题意: 岛屿个数题意: 子串简写题意: 整数删除题意: 总结 前言 一年一度的🏀杯马上就要开始了,为了取得更好的成绩,好名字写了下前年2023年蓝桥…...

C语言常见3种排序
主要是三种排序方法:冒泡排序、选择排序、插入排序。 文章目录 一、冒泡排序 1.代码: 2.工作原理: 3.具体过程: 二、选择排序 1.代码 2. 工作原理 3.具体过程: 三、插入排序 1.代码 2.工作原理 3.具体过程 总结 一、…...
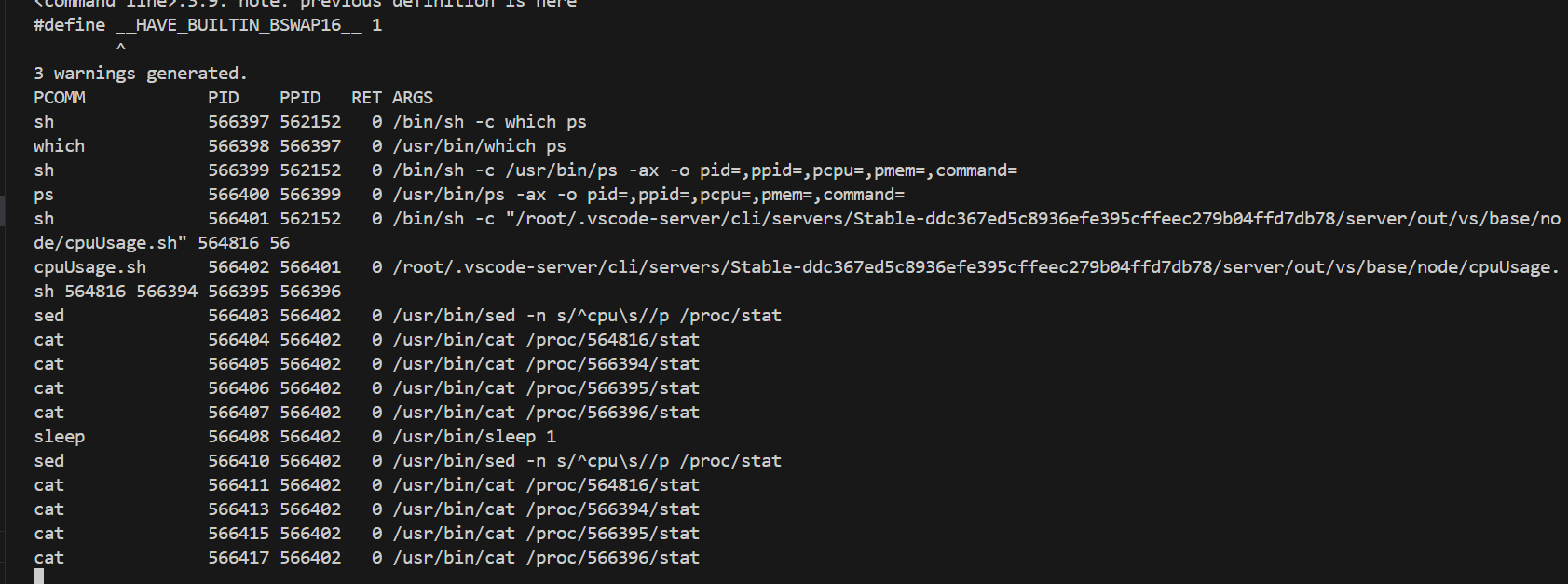
分析sys高问题的方法总结
一、背景 sys高的问题往往属于底层同学更需要关注的问题,sys高的问题往往表现为几种情况,一种是瞬间的彪高,一种是持续的彪高。这篇博客里,我们总结一下常用的分析方法和分析工具的使用来排查这类sys高的问题。 二、通过mpstat配…...

智谱发布AI Agent“AutoGLM沉思”,开启AI“边想边干”新时代
近日,智谱正式推出全新AI Agent产品——AutoGLM沉思,标志着人工智能从“思考”迈向“执行”的关键突破。该智能体不仅具备深度研究能力,还能自主完成实际操作,真正实现“边想边干”的智能化应用。 在演示环节,智谱展示…...

使用Leaflet对的SpringBoot天地图路径规划可视化实践-以黄花机场到橘子洲景区为例
目录 前言 一、路径规划需求 1、需求背景 2、技术选型 3、功能简述 二、Leaflet前端可视化 1、内容布局 2、路线展示 3、转折路线展示 三、总结 前言 在当今数字化与智能化快速发展的时代,路径规划技术已经成为现代交通管理、旅游服务以及城市规划等领域的…...
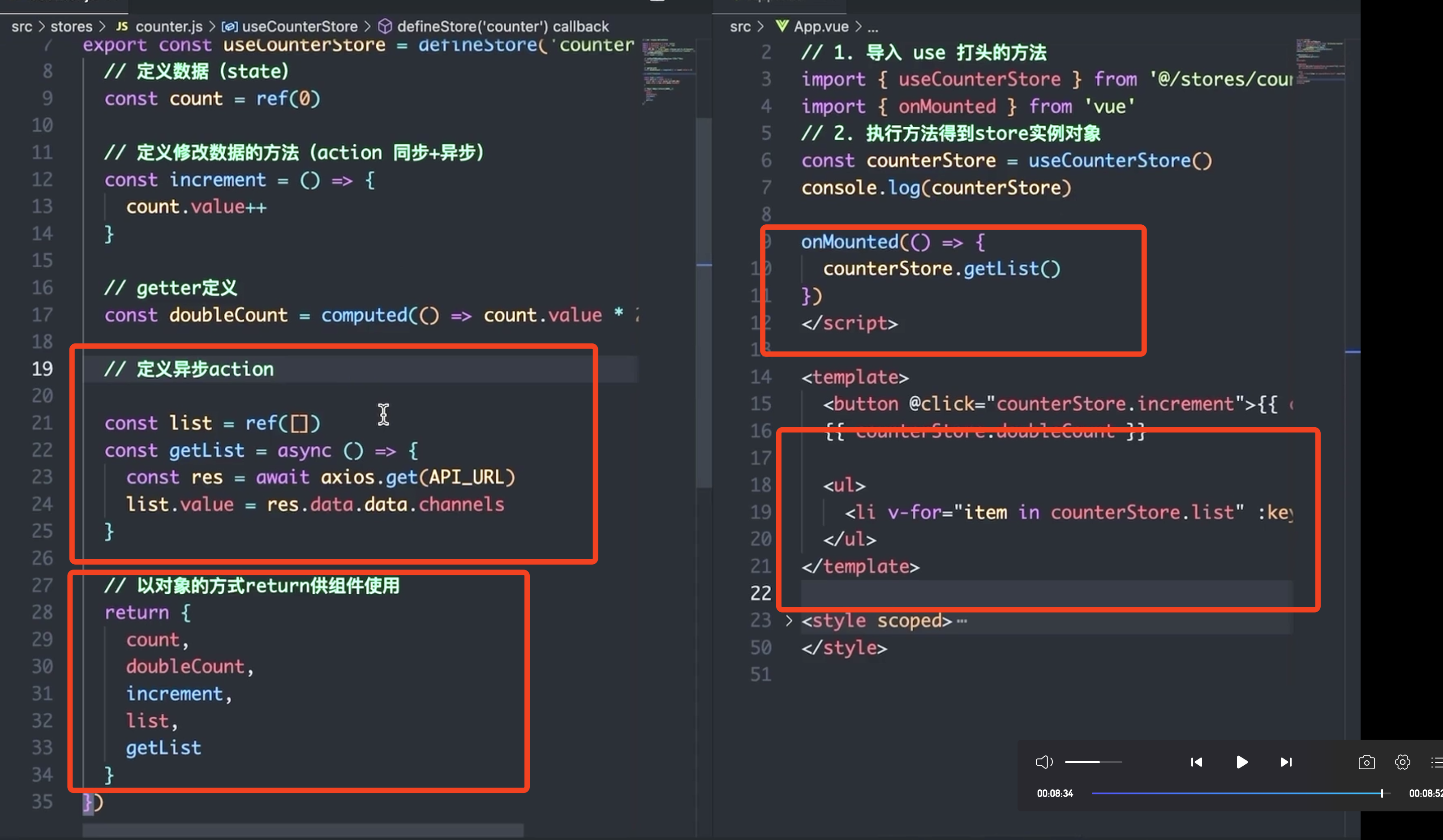
【小兔鲜】day02 Pinia、项目起步、Layout
【小兔鲜】day02 Pinia、项目起步、Layout 1. Pinia2. 添加Pinia到Vue项目3. 案例:Pinia-counter基础使用3.1 Store 是什么?3.2 应该在什么时候使用 Store? 4. Pinia-getters和异步action4.1 getters4.2 action如何实现异步 1. Pinia Pinia 是 Vue 的专…...

PyTorch 激活函数
激活函数是神经网络中至关重要的组成部分,它们为网络引入了非线性特性,使得神经网络能够学习复杂模式。PyTorch 提供了多种常用的激活函数实现。 常用激活函数 1. ReLU (Rectified Linear Unit) 数学表达式: PyTorch实现: torch.nn.ReLU(inplaceFals…...
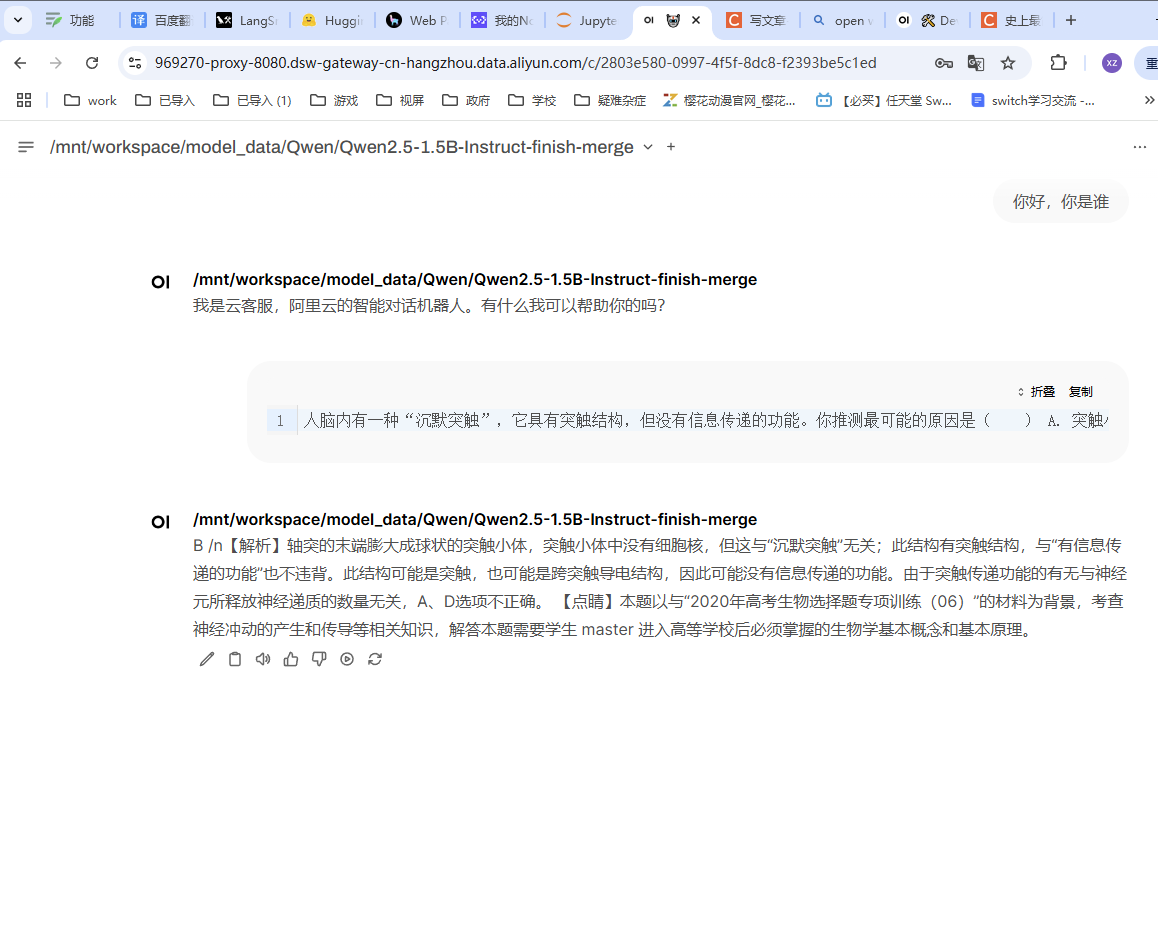
魔塔社区使用llamafactory微调AI阅卷试题系统
启动 LLaMA-Factory 1. 安装 LLaMA-Factory 执行安装指令 git clone --depth 1 https://github.com/hiyouga/LLaMA-Factory.git cd LLaMA-Factory pip install -e ".[torch,metrics]"解决依赖冲突 如果遇到依赖冲突,可使用以下命令安装,不…...

Java面试黄金宝典29
1. 什么是普通索引和唯一性索引 定义: 普通索引:是最基本的索引类型,它为数据表中的某一列或多列建立索引,以加快数据的查询速度。它不限制索引列的值重复,允许存在多个相同的值。唯一性索引:在普通索引的基…...

git `switch` 命令详解与实用示例
文章目录 git switch 命令详解与实用示例git switch vs git checkoutgit switch 用法1. 切换到已有分支2. 创建并切换到新分支3. 切换到上一个分支4. 切换到远程分支(自动创建本地分支并追踪远程)5. 放弃未提交的修改并切换分支 总结 git switch 命令详解…...

Oracle中文一二三四排序【失败】
原文地址: Oracle数据库如何对中文的一二三四五六七八九十数进行正序排列排序_中文数字排序-CSDN博客 自定义排序函数 -- 自定义中文映射阿拉伯数字函数 CREATE OR REPLACE FUNCTION P_ORDER_CHINESE_TO_ARABIC(V_NUM VARCHAR2) RETURN NUMBER IS BEGIN-- 根据…...

AWS S3 和 Lambda 使用
目录: AWS概述 EMR Serverless AWS VPC及其网络 关于AWS网络架构的思考 AWS S3 和 Lambda 使用 本文将通过一个实例来说明如何使用 AWS S3 和 Lambda。 使用场景:通过代码将文件上传到S3,该文件需要是公开访问的,并对上传的文件进…...

Mysql 在什么样的情况下会产生死锁?
在 MySQL 中,死锁是指两个或多个事务相互等待对方释放锁,导致所有相关事务无法继续执行的情况。死锁会影响数据库的并发性能,因此需要及时检测并处理。假设有两个事务 T1 和 T2: 事务 T1 首先锁定 表 A 的行 1。然后尝试锁定 表 B…...

符号秩检验
内容来源 非参数统计(第2版) 清华大学出版社 王星 褚挺进 编著 符号秩检验 在符号检验的基础上,增加了数据绝对值大小的信息 检验统计量 用一个简单的例子来说明 样本数据 X i , i 1 , ⋯ , 6 X_i,i1,\cdots,6 Xi,i1,⋯,6 如下 X …...

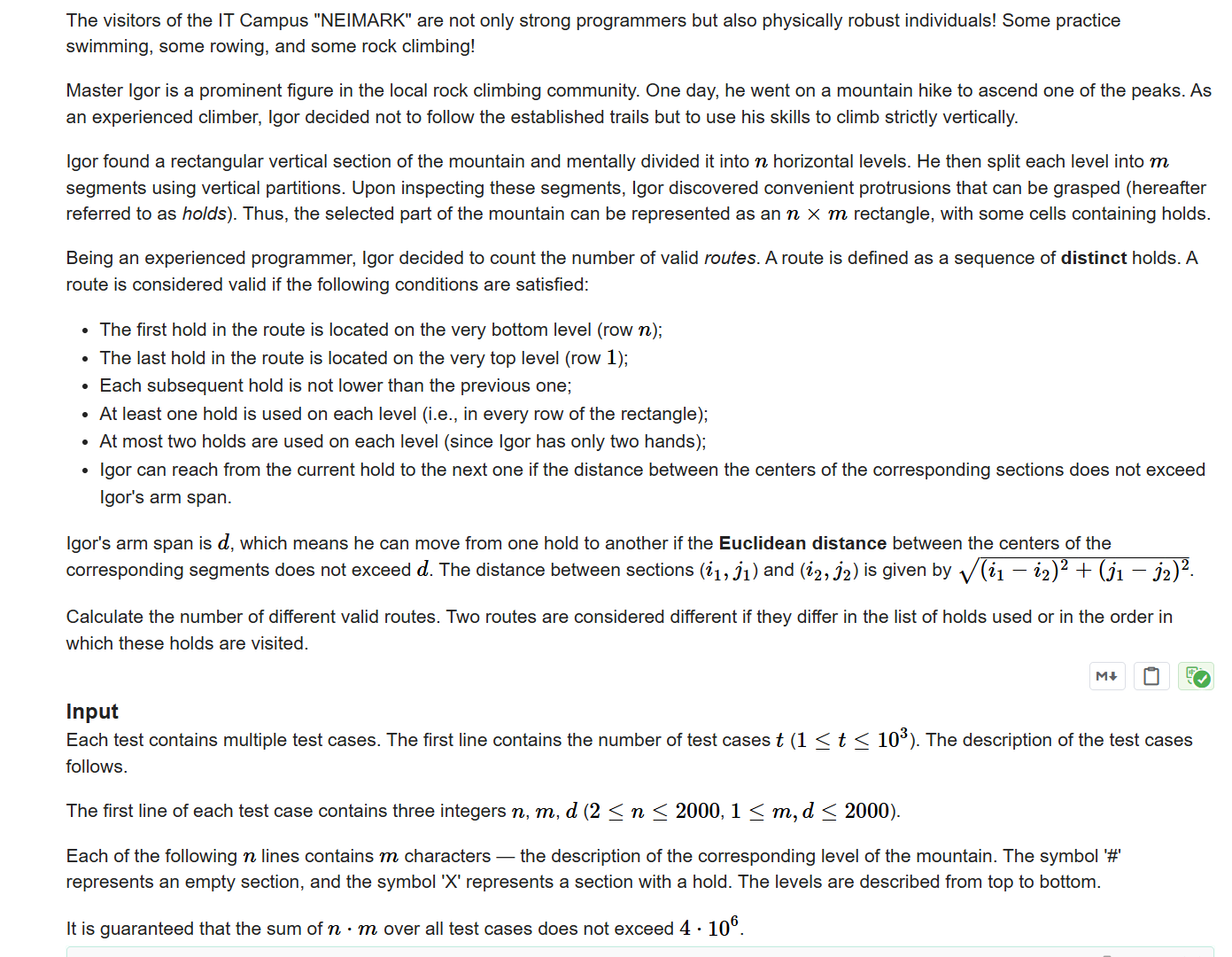
RainbowDash 的 Robot
H RainbowDash 的 Robot - 第七届校赛正式赛 —— 补题 题目大意: 给一个 n ∗ m n*m n∗m 的二维网格,在第 i i i 列中,前 a i a_i ai 单元格被阻断,无法通行,即 [ 1 , a i ] [1,a_i] [1,ai] 。 一个机器人正…...

yum repolist all全部禁用了 怎么办
文章目录 步骤思考解决yum仓库全部被禁用的问题步骤思考: 检查仓库状态:运行yum repolist all,查看所有仓库的启用状态。 被禁用的仓库会显示为disabled。 启用所有仓库:可以逐一启用,或者使用命令批量启用。 例如使用yum-config-manager --enable ‘*’,但需要注意是否有…...

SQL WHERE 与 HAVING
WHERE 和 HAVING 都是 SQL 中用于筛选数据的子句,但它们有重要的区别 WHERE 子句 在 分组前 过滤数据 作用于 原始数据行 不能使用聚合函数 执行效率通常比 HAVING 高 SELECT column1, column2 FROM table WHERE condition; HAVING 子句 在 分组后 过滤数据 …...

如何在 Unity3D 导入 Spine 动画
一、前言 《如何在 Unity3D 项目中导入 Spine 动画》,虽然在网上有很多这种文章,直接将问题交给 DeepSeek 也能得到具体的操作流程,但是照着他们提供的方法还是能遇到几个问题,比如: AI 回答没有提到 Unity 无法识别.…...

子网划分2
子网分配的问题,下列vlsm如何设置? 某公司申请了一个C类202.60.31.0的IP地址,要求设置三个子网,一个为100台主机,一个为50台主机,另一个为50台主机,用VLSM如何设置? 哪位高手指教一…...

C++的UDP连接解析域名地址错误
背景 使用c开发一个udp连接功能的脚本,可以接收发送数据,而且地址是经过内网穿透到外网的 经过 通常发送数据给目标地址,需要把目的地址结构化,要么使用inet_addr解析ip地址,要么使用inet_pton sockaddr_in target…...

23种设计模式中的观察者模式
定义了一种一对多的依赖关系,当一个对象的状态发生改变时,其所有依赖者都会收到通知并自动更新。 观察者模式是一种发布-订阅模式。它让发送通知的一方(被观察者)和接收通知的一方(观察者)能够解耦…...
论文笔记:ASTTN模型
研究现状 现有研究大多通过分别考虑空间相关性和时间相关性或在滑动时间窗口内对这种时空相关性进行建模,而未能对直接的时空相关性进行建模。受最近图领域Transformer成功的启发,该模型提出利用局部多头自关注,在自适应时空图上直接建立跨时…...

Java单例模式详解
单例模式详解 一、单例模式概述 单例模式(Singleton Pattern)是一种创建型设计模式,它确保一个类只有一个实例,并提供一个全局访问点来访问这个实例。 核心特点 唯一实例:保证一个类只有一个实例存在全局访问:提供统一的访问入…...

Linux命令-tar
tar 命令的完整参数列表: 参数 描述 -c 创建新的归档文件 -x 解压归档文件 -t 列出归档文件内容 -r 追加文件到归档文件 -u 更新归档文件中的文件 -d 从归档文件中删除文件 -f 指定归档文件的名称 -v 显示详细信息(verbose) -z 使用 gzip 压缩…...

深入解析 Git Submodule:从基础到高级操作指南
深入解析 Git Submodule:从基础到高级操作指南 一、Git Submodule 是什么? git submodule 是 Git 提供的一个强大功能,允许在一个 Git 仓库(主仓库)中嵌入另一个独立的 Git 仓库(子模块)。主仓…...