ROS云课三分钟-差动移动机器人巡逻报告如何撰写-中等报告
评语:
成绩中等(70/100),具体如下:
1. 摘要部分
- 问题描述:
- 内容空洞:摘要过于简短,仅简要概述了研究内容和实现方法,未突出研究的创新点或重要性。
- 缺乏细节:没有提及实验的具体结果或研究的实际应用价值。
2. 引言部分
- 问题描述:
- 背景分析不深入:对两轮差速移动机器人的应用场景和自主巡逻功能的重要性分析不够全面和深入。
- 研究现状缺失:未提及当前该领域的研究进展、存在的问题以及本研究的目的和意义。
- 目的不明确:读者难以从引言中明确了解本研究的具体目标和预期成果。
3. 系统架构部分
- 问题描述:
- 描述笼统:对ROS节点设计、消息类型和系统流程的描述过于简单,缺乏具体的细节和解释。
- 缺乏图示:没有使用流程图、示意图或系统架构图来直观地展示系统的组成和工作流程。
- 技术细节缺失:未详细介绍关键组件(如patrol_robot节点)的具体功能和实现方式。
4. 代码实现部分
- 问题描述:
- 代码注释缺失:核心代码缺乏必要的注释,读者难以理解其功能和实现逻辑。
- 结构不清晰:代码结构混乱,没有良好的模块划分和函数封装,导致可读性差。
- 代码示例不完整:仅提供了部分代码片段,未展示完整的程序结构和流程。
5. 关键技术点部分
- 问题描述:
- 解释不深入:对关键技术点(如坐标系与框架ID、消息同步与时间戳)的解释过于简单,缺乏深入的理论分析和实验验证。
- 缺乏实验支持:未提供实验数据或案例来验证关键技术点的有效性和可靠性。
6. 实验结果部分
- 问题描述:
- 实验过程不详:对实验过程的描述过于简略,缺乏详细的步骤、参数设置和遇到的问题及解决方法。
- 数据不足:实验结果缺乏具体的数据支持,如机器人的移动速度、路径偏差、到达时间等关键指标。
- 图表缺失:未使用图表来直观地展示实验结果和数据分析。
7. 改进方向部分
- 问题描述:
- 方案笼统:提出的改进方向过于笼统和模糊,缺乏具体的实现方案和步骤。
- 缺乏创新性:部分改进方向缺乏新颖性和创新性,未能体现研究的独特价值。
8. 结论部分
- 问题描述:
- 总结不全:结论部分未能全面总结研究的主要贡献和创新点。
- 展望不足:对未来的研究方向和应用前景展望不够深入和具体。
9. 参考文献部分
- 问题描述:
- 引用数量少:参考文献数量过少,未能充分展示研究的学术背景和相关工作的支持。
- 引用不规范:部分引用格式不规范,未遵循学术引用标准。
10. 附录部分
- 问题描述:
- 内容单一:附录内容单一,仅提供了部分代码片段,缺乏详细的实验数据、图表和完整的代码实现。
- 信息不足:附录未提供足够的信息来支持报告的结论和发现。
综上所述,这份报告在多个方面存在明显不足,导致整体评分较低。为了提升报告质量,需要对上述问题进行全面梳理和逐一改进。
两轮差速移动机器人研究报告:基于ROS的自主巡逻实现
摘要
本研究报告基于ROS(Robot Operating System)框架,设计并实现了一个两轮差速移动机器人的自主巡逻功能。通过发布目标位置(goal pose)到/move_base_simple/goal主题,机器人能够按照预定义路径在二维平面上自主移动。本报告详细阐述了系统架构、代码实现、关键技术点以及实验结果,为两轮差速移动机器人的自主导航提供了可行的解决方案。
1. 引言
两轮差速移动机器人是移动机器人领域的重要研究方向,具有结构简单、运动灵活等特点。在仓储物流、家庭服务、工业巡检等场景中,自主巡逻功能对机器人实现高效任务执行具有重要意义。本研究基于ROS框架,利用geometry_msgs/PoseStamped消息类型,实现机器人在二维平面上的自主导航。
2. 系统架构
2.1 ROS节点设计
本系统的核心节点为patrol_robot,其功能包括:
-
初始化ROS节点;
-
定义巡逻路径(waypoints);
-
按顺序向
/move_base_simple/goal主题发布目标位置; -
控制目标点之间的时间间隔。
2.2 消息类型
-
geometry_msgs/PoseStamped:用于表示目标位置,包含位置信息(Point)和方向信息(Quaternion)。 -
发布主题:
/move_base_simple/goal,接收目标位置并驱动机器人移动。
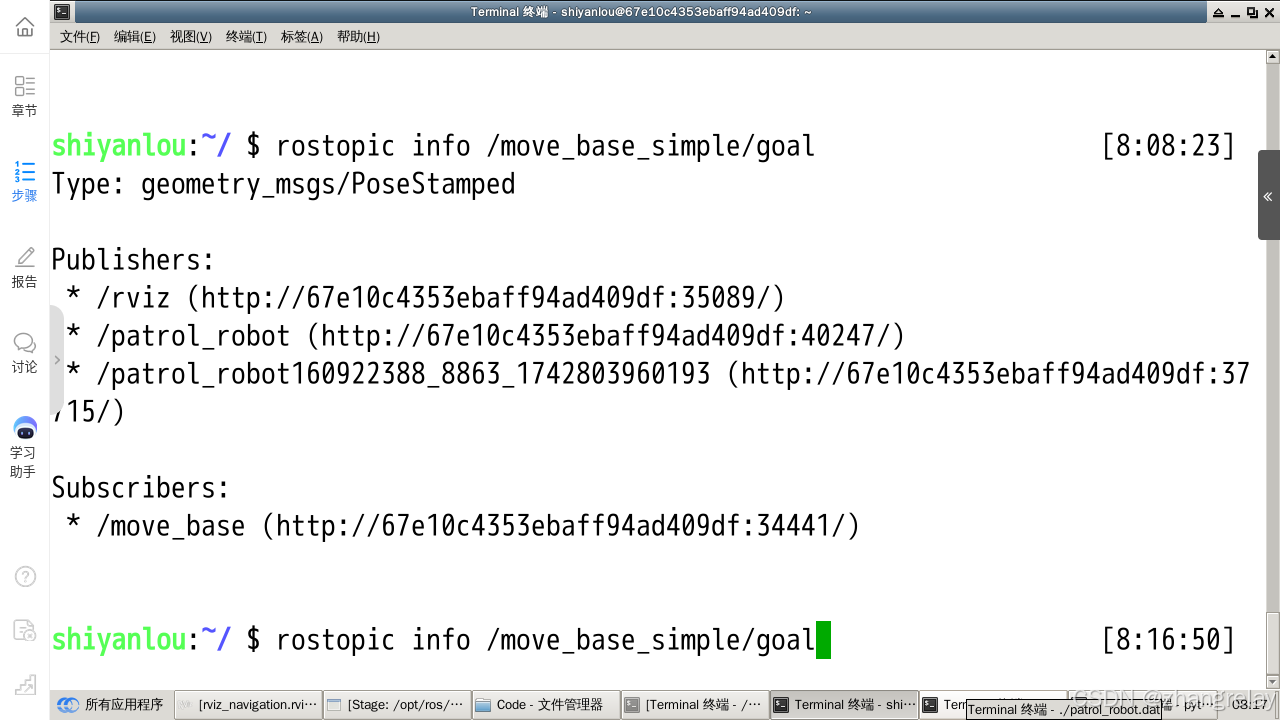
图2.1 rostopic info /move_base_simple/goal
2.3 系统流程
-
初始化ROS节点;
-
定义巡逻路径(waypoints);
-
循环发布目标位置到
/move_base_simple/goal; -
等待机器人到达目标点后,继续发布下一个目标位置;
-
循环执行,直至ROS节点关闭。
3. 代码实现
3.1 核心代码分析
3.1.1 初始化ROS节点
<span style="color:#000000"><code>python</code></span>| rospy.init_node('patrol_robot', anonymous=True) |
-
初始化ROS节点,节点名为
patrol_robot。 -
anonymous=True确保节点名唯一,避免冲突。
3.1.2 定义巡逻路径
<span style="color:#000000"><code>python</code></span>| waypoints = [ |
| PoseStamped( |
| header=rospy.Header(frame_id="map", stamp=rospy.Time.now()), |
| pose=Pose( |
| position=Point(x=1.0, y=1.0, z=0.0), |
| orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0) |
| ) |
| ), |
| PoseStamped( |
| header=rospy.Header(frame_id="map", stamp=rospy.Time.now()), |
| pose=Pose( |
| position=Point(x=3.0, y=3.0, z=0.0), |
| orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0) |
| ) |
| ) |
| ] |
-
定义两个目标点(waypoints),分别位于地图坐标系下的
(1.0, 1.0)和(3.0, 3.0)。 -
使用
PoseStamped消息类型,包含位置信息(Point)和方向信息(Quaternion)。
3.1.3 发布目标位置
<span style="color:#000000"><code>python</code></span>| goal_pub = rospy.Publisher('/move_base_simple/goal', PoseStamped, queue_size=10) |
-
创建发布者,向
/move_base_simple/goal主题发布PoseStamped消息。
<span style="color:#000000"><code>python</code></span>| def send_goal(goal_pub, waypoint): |
| rospy.loginfo("Sending goal to: (%.2f, %.2f)", waypoint.pose.position.x, waypoint.pose.position.y) |
| goal_pub.publish(waypoint) |
-
定义
send_goal函数,用于发布目标位置并记录日志。
3.1.4 主循环
<span style="color:#000000"><code>python</code></span>| try: |
| while not rospy.is_shutdown(): |
| for waypoint in waypoints: |
| send_goal(goal_pub, waypoint) |
| rospy.sleep(20) |
| except rospy.ROSInterruptException: |
| pass |
-
循环发布目标位置,每个目标点之间间隔20秒。
-
使用
rospy.is_shutdown()检测ROS节点是否关闭。
4. 关键技术点
4.1 坐标系与框架ID
-
使用
frame_id="map"指定目标位置在地图坐标系下的表示。 -
确保机器人导航栈(Navigation Stack)的地图坐标系与代码一致。
4.2 消息同步与时间戳
-
使用
rospy.Time.now()为消息添加时间戳,确保消息的时效性。 -
通过
rospy.sleep()控制目标点之间的时间间隔,避免发布频率过高。
4.3 异常处理
-
使用
try-except块捕获ROSInterruptException,确保节点关闭时程序正常退出。
5. 实验结果
5.1 实验环境
-
硬件平台:#!/usr/bin/env python
-
import rospy
-
from geometry_msgs.msg import PoseStamped, Pose, Point, Quaternion
-
def send_goal(goal_pub, waypoint):
-
rospy.loginfo("Sending goal to: (%.2f, %.2f)", waypoint.pose.position.x, waypoint.pose.position.y)
-
goal_pub.publish(waypoint)
-
def main():
-
rospy.init_node('patrol_robot', anonymous=True)
-
waypoints = [
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=1.0, y=1.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
),
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=3.0, y=3.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
)
-
]
-
#!/usr/bin/env python
-
import rospy
-
from geometry_msgs.msg import PoseStamped, Pose, Point, Quaternion
-
def send_goal(goal_pub, waypoint):
-
rospy.loginfo("Sending goal to: (%.2f, %.2f)", waypoint.pose.position.x, waypoint.pose.position.y)
-
goal_pub.publish(waypoint)
-
def main():
-
rospy.init_node('patrol_robot', anonymous=True)
-
waypoints = [
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=1.0, y=1.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
),
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=3.0, y=3.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
)
-
]
-
goal_pub = rospy.Publisher('/move_base_simple/goal', PoseStamped, queue_size=10)
-
rospy.sleep(1)
-
try:
-
while not rospy.is_shutdown():
-
for waypoint in waypoints:
-
send_goal(goal_pub, waypoint)
-
rospy.sleep(20)
-
except rospy.ROSInterruptException:
-
pass
-
if __name__ == '__main__':
-
main()
-
依据如上代码,撰写一份两轮差速移动机器人研究报告。
-
goal_pub = rospy.Publisher('/move_base_simple/goal', PoseStamped, queue_size=10)
-
rospy.sleep(1)
-
try:
-
while not rospy.is_shutdown():
-
for waypoint in waypoints:
-
send_goal(goal_pub, waypoint)
-
rospy.sleep(20)
-
except rospy.ROSInterruptException:
-
pass
-
if __name__ == '__main__':
-
main()
-
依据如上代码,撰写一份两轮差速移动机器人研究报告。
-
轮差速移动机器人(配备激光雷达、IMU等传感器)。
-
软件平台:ROS Melodic Morenia,Ubuntu 18.04。
-
导航栈:使用
move_base节点实现路径规划与运动控制。
5.2 实验过程
-
启动ROS核心与导航栈;
-
启动
patrol_robot节点; -
观察机器人按照预定义路径自主移动。
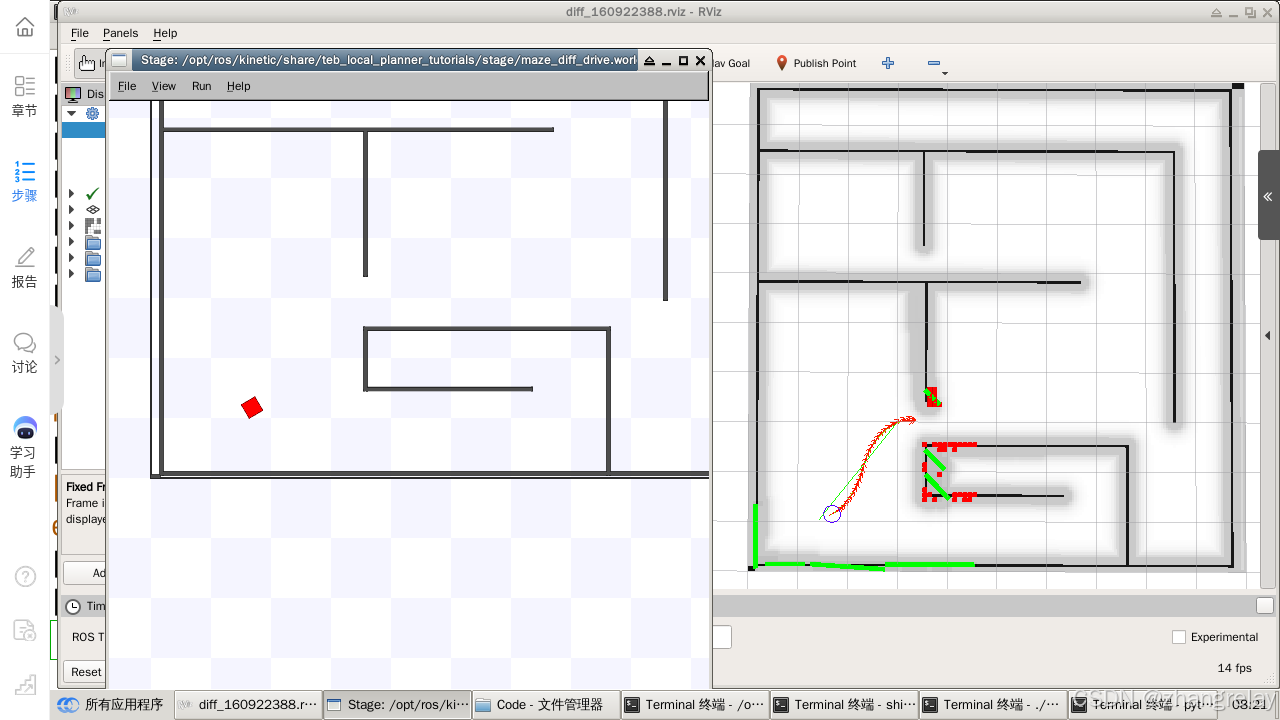
图5.1 patrol效果
5.3 实验结果
-
机器人成功从
(1.0, 1.0)移动到(3.0, 3.0),并在每个目标点停留约20秒; -
日志输出显示目标位置发布正常,无消息丢失;
-
机器人运动轨迹平滑,无明显偏差。
6. 改进方向
-
动态路径规划:结合传感器数据(如激光雷达),实现实时避障与动态路径规划。
-
多机器人协同:扩展系统支持多机器人协同巡逻,提高任务执行效率。
-
用户交互界面:开发图形化界面,允许用户动态调整巡逻路径。
7. 结论
本研究基于ROS框架,成功实现了两轮差速移动机器人的自主巡逻功能。通过发布目标位置到/move_base_simple/goal主题,机器人能够按照预定义路径自主移动。实验结果表明,系统稳定可靠,具有较高的实用价值。未来工作将聚焦于动态路径规划与多机器人协同,进一步提升系统的智能化水平。
参考文献
-
ROS官方文档:Documentation - ROS Wiki
-
《ROS by Example》 - R. Patrick Goebel
-
《Probabilistic Robotics》 - Sebastian Thrun, Wolfram Burgard, Dieter Fox
附录:完整代码见正文。
针对提供的文件《160922388两轮差速巡逻报告250324.pdf》,这份报告在结构和内容上都存在较多不足,以下是一些严厉的批评以及具体的修改意见,旨在帮助将这份报告提升至更高水平:
严厉批评
- 摘要部分:
- 内容空洞:摘要过于简洁,没有突出研究的创新点和重要性。
- 缺乏吸引力:未能激发读者对研究内容的兴趣。
- 引言部分:
- 背景分析不足:对两轮差速移动机器人的应用场景和自主巡逻功能的重要性分析不够深入。
- 研究现状缺失:未提及当前研究的不足和本研究的填补空白之处。
- 系统架构部分:
- 描述笼统:对ROS节点设计、消息类型和系统流程的描述过于笼统,缺乏细节。
- 缺乏图示:没有使用流程图或示意图来直观展示系统架构。
- 代码实现部分:
- 代码注释缺失:核心代码缺乏注释,难以理解其功能。
- 结构混乱:代码结构不清晰,没有良好的模块划分。
- 关键技术点部分:
- 解释不深入:对关键技术点的解释过于简单,没有深入探讨其原理和实现方法。
- 缺乏验证:未提供实验数据或案例来验证关键技术点的有效性和可靠性。
- 实验结果部分:
- 实验过程不详:对实验过程的描述过于简略,缺乏详细的步骤和遇到的问题及解决方法。
- 数据不足:实验结果缺乏具体的数据支持,无法直观展示机器人的性能。
- 改进方向部分:
- 方案笼统:提出的改进方向过于笼统,缺乏具体的实现方案和步骤。
- 缺乏前瞻性:未结合当前技术发展趋势,提出具有前瞻性的改进建议。
- 结论部分:
- 总结不全:未能全面总结研究的主要贡献和创新点。
- 展望不足:对未来的研究方向和应用前景展望不够深入。
- 参考文献部分:
- 引用数量少:参考文献数量过少,未能充分展示研究的学术背景。
- 引用不新:部分引用文献较为陈旧,未能反映最新的研究成果。
- 附录部分:
- 内容单一:附录内容单一,缺乏实验数据和完整的代码实现。
修改意见
- 摘要部分:
- 突出研究的创新点和重要性,例如:“本研究基于ROS框架,创新性地实现了两轮差速移动机器人在二维平面上的自主巡逻功能,并通过详细的实验验证了其稳定性和实用性。”
- 引言部分:
- 深入分析两轮差速移动机器人的应用场景和自主巡逻功能的重要性。
- 提及当前研究的不足和本研究的填补空白之处,明确研究的目的和意义。
- 系统架构部分:
- 详细描述ROS节点设计、消息类型和系统流程,包括每个节点的功能和消息类型的字段含义。
- 使用流程图或示意图来直观展示系统架构。
- 代码实现部分:
- 为核心代码添加详细的注释,解释其功能。
- 优化代码结构,将代码拆分为多个函数或类,提高代码的可读性和可维护性。
- 关键技术点部分:
- 深入探讨每个关键技术点的原理和实现方法。
- 提供实验数据或案例来验证关键技术点的有效性和可靠性。
- 实验结果部分:
- 详细描述实验过程,包括每个步骤和遇到的问题及解决方法。
- 提供具体的实验数据,如机器人的移动速度、路径偏差等,直观展示机器人的性能。
- 改进方向部分:
- 提出具体的改进方案和步骤,结合当前技术发展趋势,提出具有前瞻性的改进建议。
- 结论部分:
- 全面总结研究的主要贡献和创新点。
- 深入展望未来的研究方向和应用前景。
- 参考文献部分:
- 增加引用数量,引用更多与两轮差速移动机器人和自主巡逻功能相关的最新研究成果。
- 附录部分:
- 提供详细的实验数据表格和图表。
- 提供完整的代码实现,包括主程序、辅助函数和配置文件等。
通过上述修改意见的实施,可以显著提升这份报告的质量和学术水平。
相关文章:
ROS云课三分钟-差动移动机器人巡逻报告如何撰写-中等报告
评语: 成绩中等(70/100),具体如下: 1. 摘要部分 问题描述: 内容空洞:摘要过于简短,仅简要概述了研究内容和实现方法,未突出研究的创新点或重要性。缺乏细节࿱…...

Java8+Spring Boot + Vue + Langchain4j 实现阿里云百炼平台 AI 流式对话对接
1. 引言 在本文中,我们将介绍如何使用 Spring Boot、Vue.js 和 Langchain4j,实现与 阿里云百炼平台 的 AI 流式对话对接。通过结合这些技术,我们将创建一个能够实时互动的 AI 聊天应用。 这是一个基于 Spring Boot Vue.js Langchain4j 的智…...
:一种轻量化的动态稀疏门控网络)
可发1区的超级创新思路(python 实现):一种轻量化的动态稀疏门控网络
首先声明,该模型为原创!原创!原创!且该思路还未有成果发表,感兴趣的小伙伴可以借鉴! 一、应用领域 视频异常检测、生成视频检测。 二、模型解析 该模型由1.关键帧动态选择机制、2.关键帧动态选择机制以及3.关键帧动态选择机制三大核心组件构成,形成端到端的视频异常…...

【Kafka基础】单机安装与配置指南,从零搭建环境
学习Kafka,掌握Kafka的单机部署是理解其分布式特性的第一步。本文将手把手带你完成Kafka单机环境的安装、配置及基础验证,涵盖常见问题排查技巧。 1 环境准备 1.1 系统要求 操作系统:CentOS 7.9依赖组件:JDK 8(Kafka …...

Scala 转义字符
Scala 转义字符 引言 Scala作为一种多范式编程语言,拥有丰富的字符处理能力。在Scala编程中,转义字符的使用非常频繁,它们可以用来处理字符串中的特殊字符,使得字符串的表示更加直观和符合预期。本文将详细探讨Scala中的转义字符…...

TCP/IP五层协议
目录 1. 五层模型结构 2. 各层核心功能与协议 (1) 应用层(Application Layer) (2) 传输层(Transport Layer) (3) 网络层(Network Layer) (4) 数据链路层(Data Link Layer) (5…...
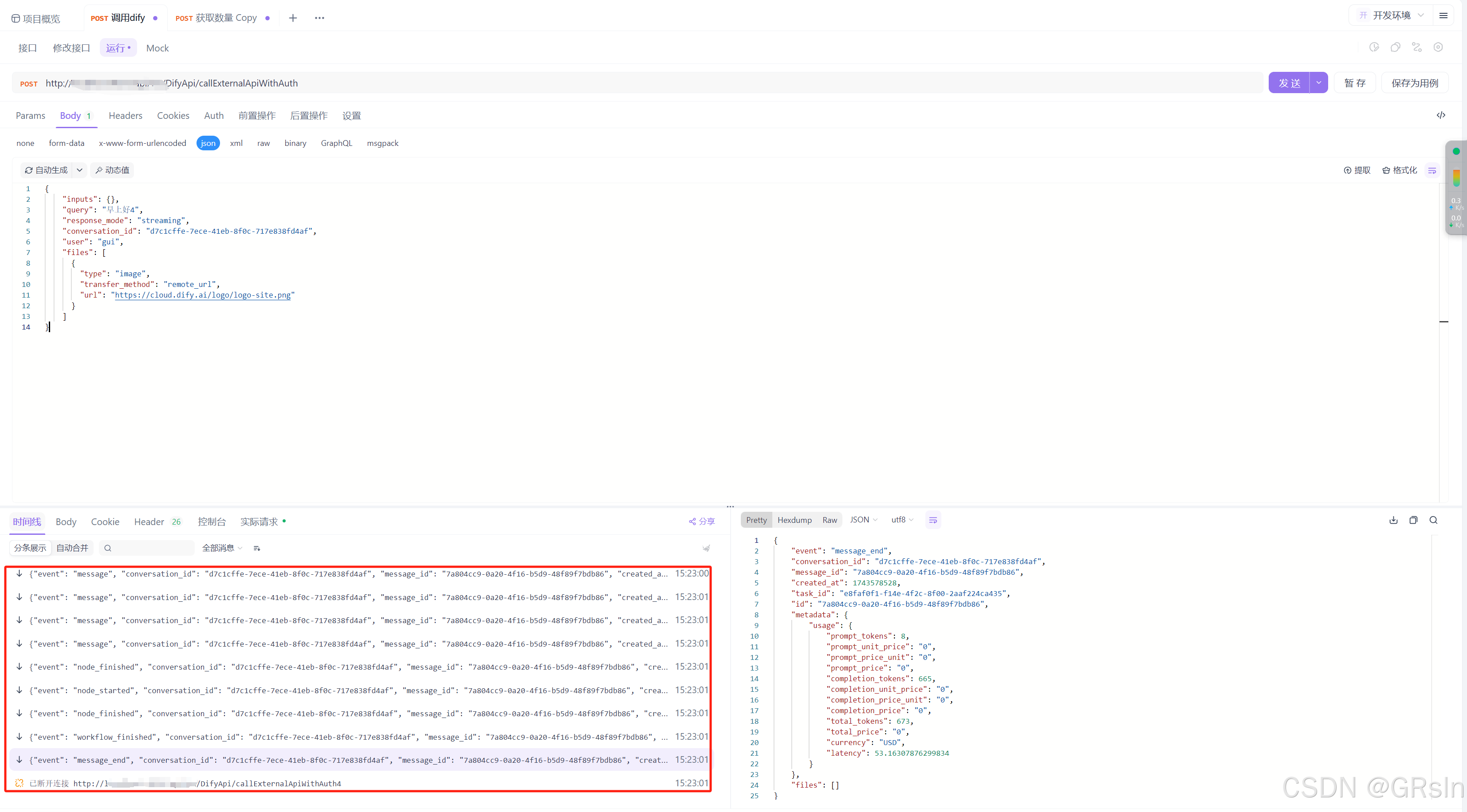
Dify接口api对接,流式接收流式返回(.net)
试了好多种方法除了Console.WriteLine()能打印出来,试了好些方法都不行,不是报错就是打印只有一行,要么就是接收完才返回...下面代码实现调用api接收流式数据,并进行流式返回给前端: using Furion.HttpRemote; using …...

微信小程序开发前端培训课程
大前端培训课程 1.HTML课程: 1.HTML标签基础 2.布局DIVspan 3.表单标签 4.多媒体标签 5.Table使用 2.CSS课程: 1.Box 盒子模型,列表布局(一行两列,一行多列) 2.单行文字,多行文字 3.文…...
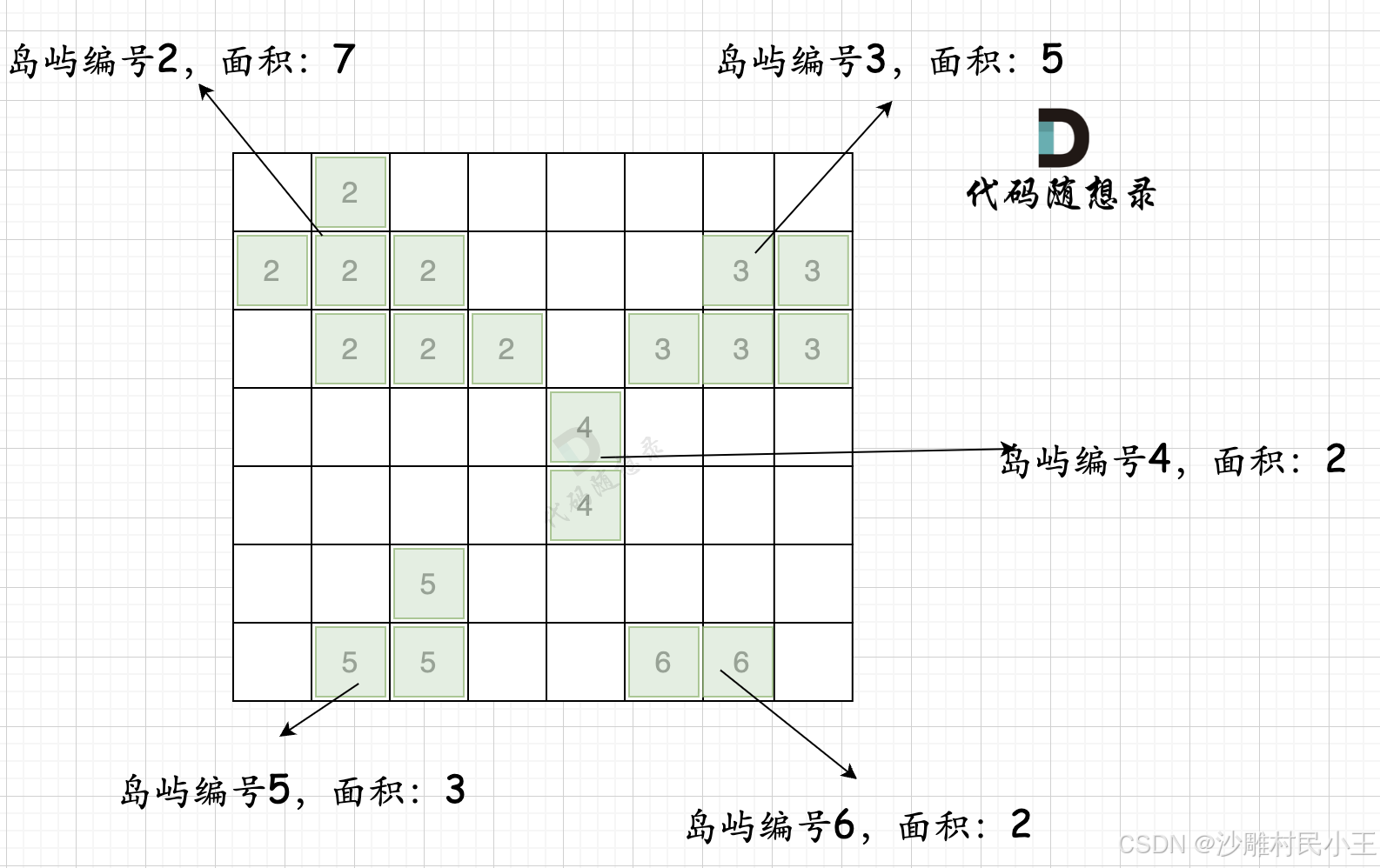
代码随想录算法训练营第五十二天|图论专题: 101. 孤岛的总面积、102. 沉没孤岛、103. 水流问题、104. 建造最大岛屿
101. 孤岛的总面积 本题要求找到不靠边的陆地面积,那么我们只要从周边找到陆地然后 通过 dfs或者bfs 将周边靠陆地且相邻的陆地都变成海洋,然后再去重新遍历地图 统计此时还剩下的陆地就可以了。 1、从左边和后边向中间遍历 2、从上边和下边向中间遍历…...
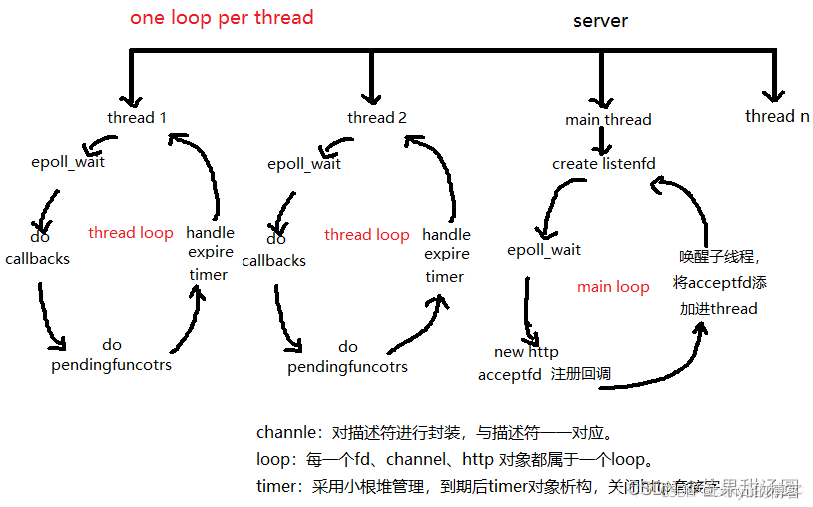
仿modou库one thread one loop式并发服务器
源码:田某super/moduo 目录 SERVER模块: Buffer模块: Socket模块: Channel模块: Connection模块: Acceptor模块: TimerQueue模块: Poller模块: EventLoop模块&a…...

MNIST 数据集 与 TFOD API
此处给出我在进行毕业设计过程中写的三份脚本,作为demo 展示模型的预处理,输出信息提取和TFOD API的应用。 script1 加载本地的MNIST模型,对本地的手写数字进行推理 # test the validation of the saved file and the camera import cv2 i…...
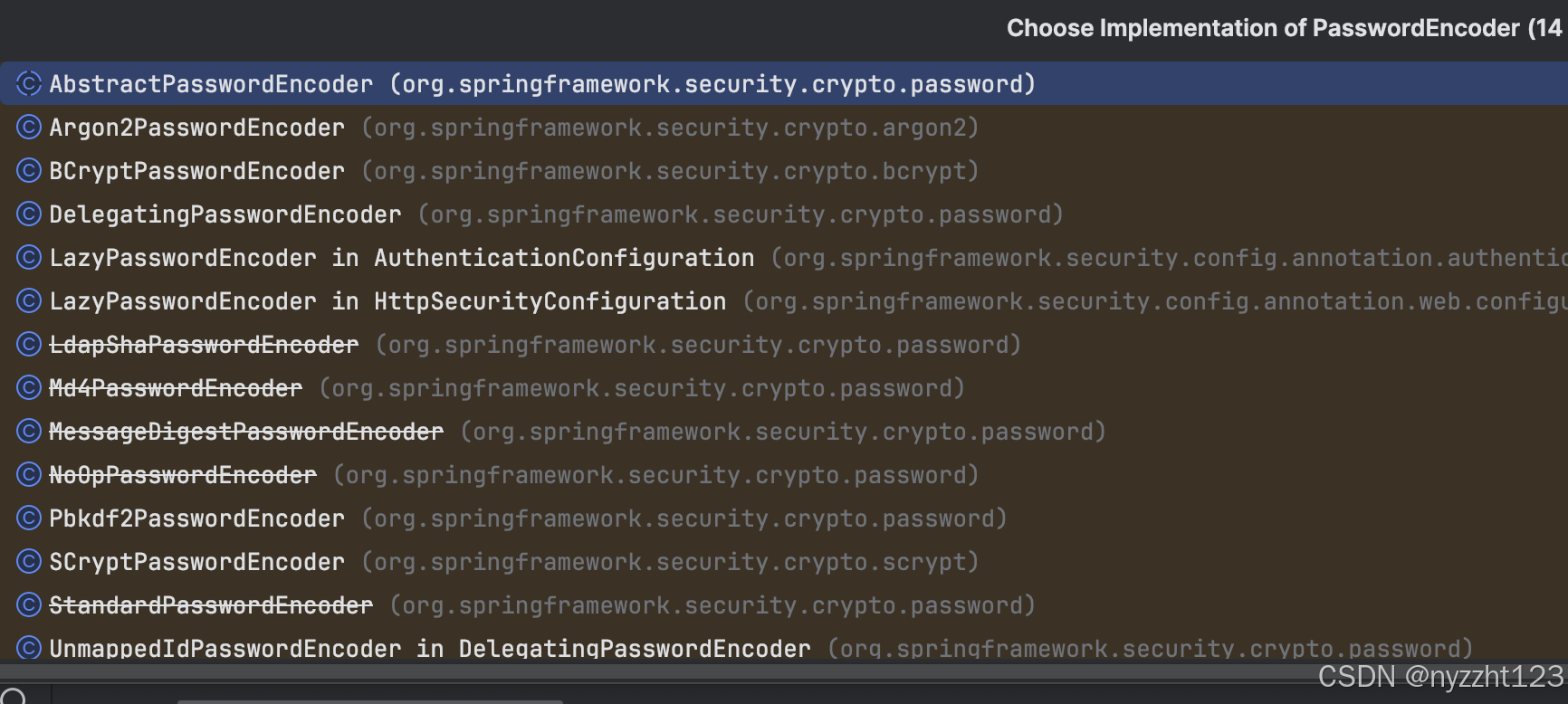
SpringSecurity6.0 通过JWTtoken进行认证授权
之前写过一个文章,从SpringSecurity 5.x升级到6.0,当时是为了配合公司的大版本升级做的,里面的各项配置都是前人留下来的,其实没有花时间进行研究SpringSecurity的工作机制。现在新东家有一个简单的系统要搭建,用户的认…...
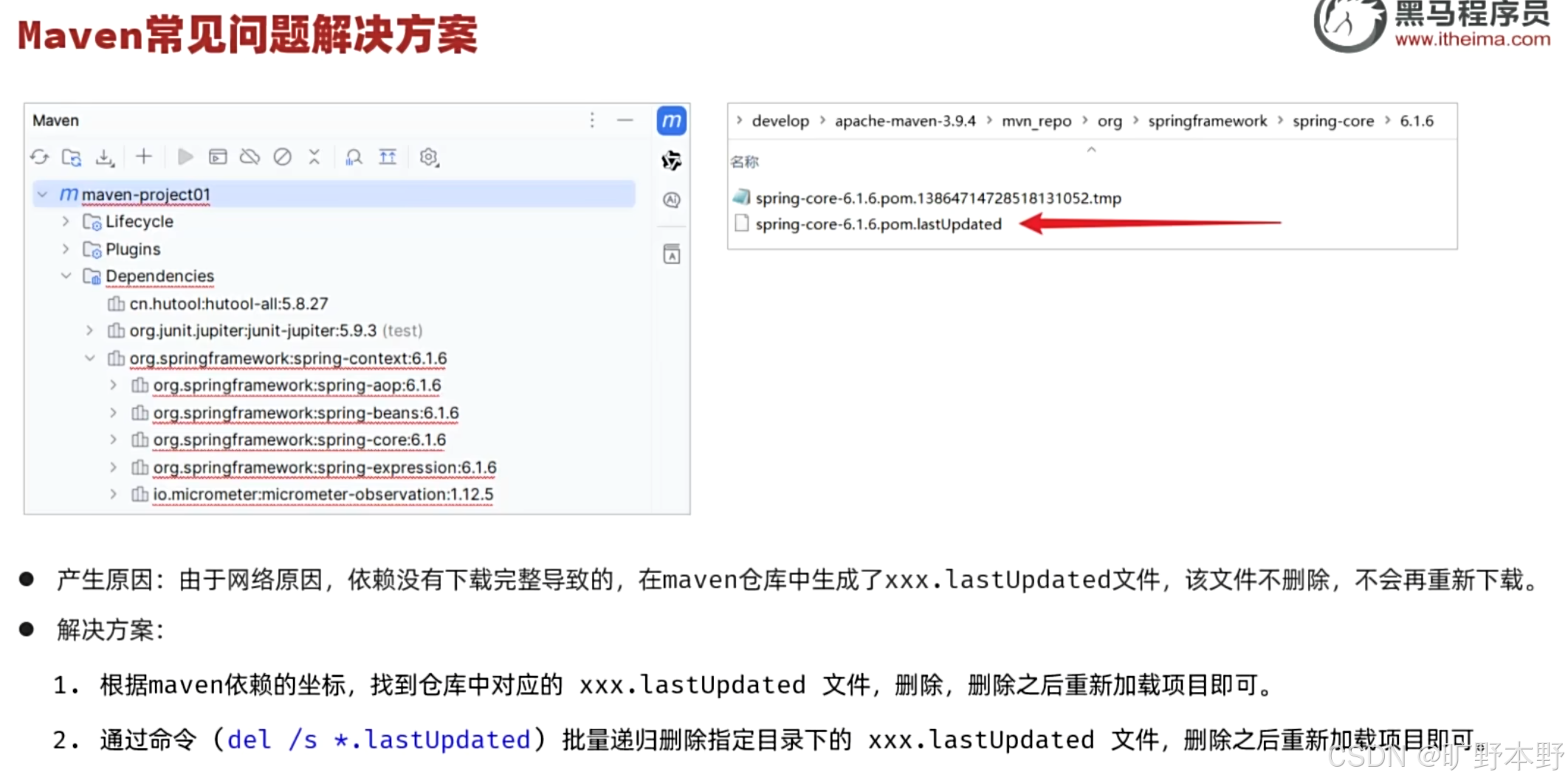
【Java】Maven
一、概念 是一个项目管理和构建工具,它基于项目对象模型(POM)的概念,通过一小段描述信息来管理项目的构建。 二、Maven坐标 <groupId>com.itheima</groupId><artifactId>maven-project01</artifactId>&…...

第十五届蓝桥杯PythonC组题解
A题:拼正方形 问题描述 给定一定数量的 22 和 11 的方块,求能拼出的最大正方形边长。 解题思路 二分法:将奇数和偶数边长分开处理,通过二分法寻找最大满足条件的边长。面积验证:总方块面积需大于等于目标正方形面积…...

MATLAB中plot函数的详细参数表
LineSpec - 线型、标记和颜色 线型说明-实线--虚线:点线-.点划线 标记说明o圆圈加号*星号.点x叉号_水平线条|垂直线条s方形d菱形^上三角v下三角>右三角<左三角p五角形h六角形 颜色说明 y 黄色 m 品红色 c 青蓝色 r 红色 g 绿色 b 蓝色 w 白色 k 黑色 MarkerFaceColor…...
R语言赋能气象水文科研:从多维数据处理到学术级可视化
全球气候变化加剧了极端天气与水文事件的复杂性,气象卫星、雷达、地面观测站及水文传感器每天产生TB级时空异质数据。传统研究常面临四大瓶颈: 数据清洗低效:缺失值、异常值处理耗时;时空分析模型构建复杂࿱…...

虚拟试衣间-云尚衣橱小程序-衣橱管理实现
衣橱管理实现 目标 (Goal): 用户 (User): 能通过 UniApp 小程序上传衣服图片。 后端 (Backend): 接收图片,存到云存储,并将图片信息(URL、用户ID等)存入数据库。 用户 (User): 能在小程序里看到自己上传的所有衣服图片列表。 技术栈细化 (Refined Tech Stack for this Pha…...
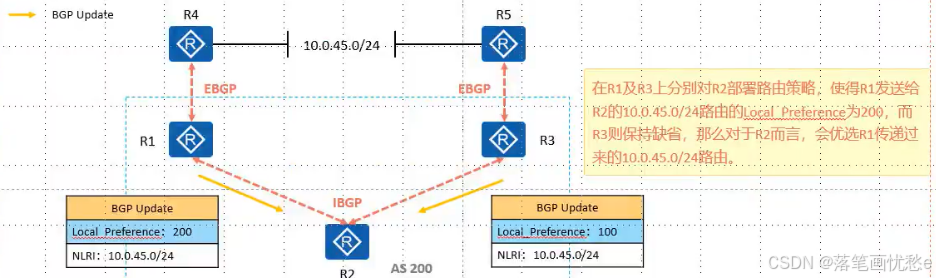
BGP路由协议之属性2
Orgin 起源 公认必遵属性 起源名称标记描述IGPi如果路由是由始发的 BGP 路由器使用 network 命令注入到 BGP 的,那么该 BGP 路由的 origin 属性为 IGPEGPe如果路由是通过 EGP 学习到的,那么该 BGP 路由的 Origin 属性为 EGPIncomplete?如果路由是通过…...

纯个人整理,蓝桥杯使用的算法模板day2(0-1背包问题),手打个人理解注释,超全面,且均已验证成功(附带详细手写“模拟流程图”,全网首个
算法索引 01背包优化前空间优化版(使用一维数组)优化后的模拟流程图为何优化后,j不能使用正序遍历模拟流程图 代码对应实现案例 01背包 优化前 /*** 0-1背包问题解法(与下方代码表格示例对应,已模拟验证)*…...
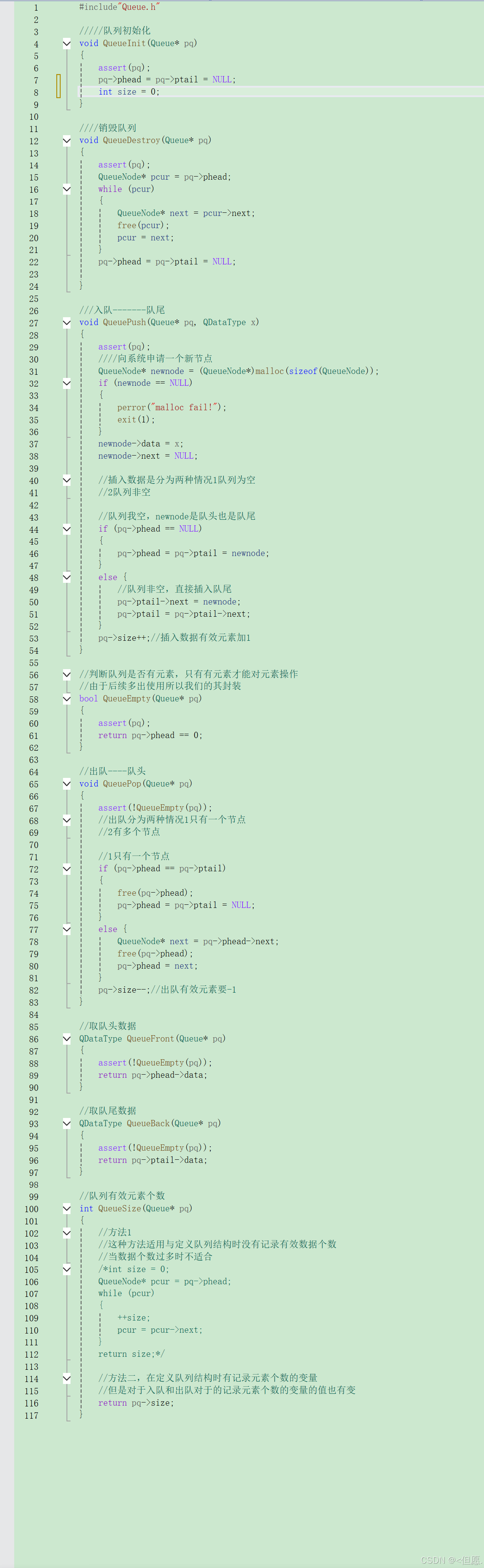
算法与数据结构线性表之栈和队列
Hello大家好! 很高兴与大家见面! 给生活添点快乐,开始今天的编程之路。 我的博客:<但愿. 我的专栏:C语言、题目精讲、算法与数据结构、C 欢迎点赞,关注 一 栈 1概念:栈是⼀种特殊的线性表,其只允许…...
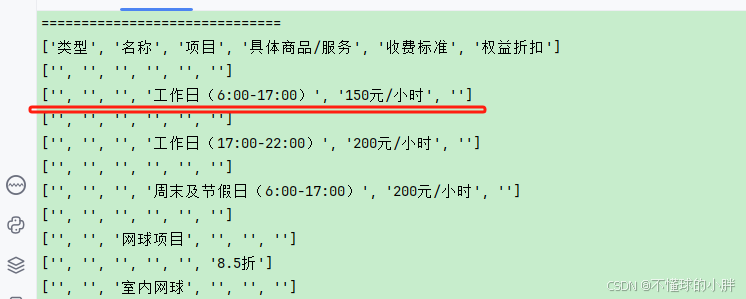
python应用之使用pdfplumber 解析pdf文件内容
目录标题 一. 通过 pdfplumber.open() 解析复杂PDF:1-2. 报错:V2 : 1-3. v3 使用tk 库,弹框选择文件运行环境准备完整代码保存运行测试步骤方式二:命令行方式(适用于自动化) 测试用例示例常见问…...

laravel update报In PackageManifest.php line 122:Undefined index: name 错误的解决办法
用 composer 更新 laravel依赖包时报错 > Illuminate\Foundation\ComposerScripts::postAutoloadDump > Illuminate\Foundation\ComposerScripts::postAutoloadDump > php artisan package:discover --ansiIn PackageManifest.php line 122:Undefined index: nameScr…...
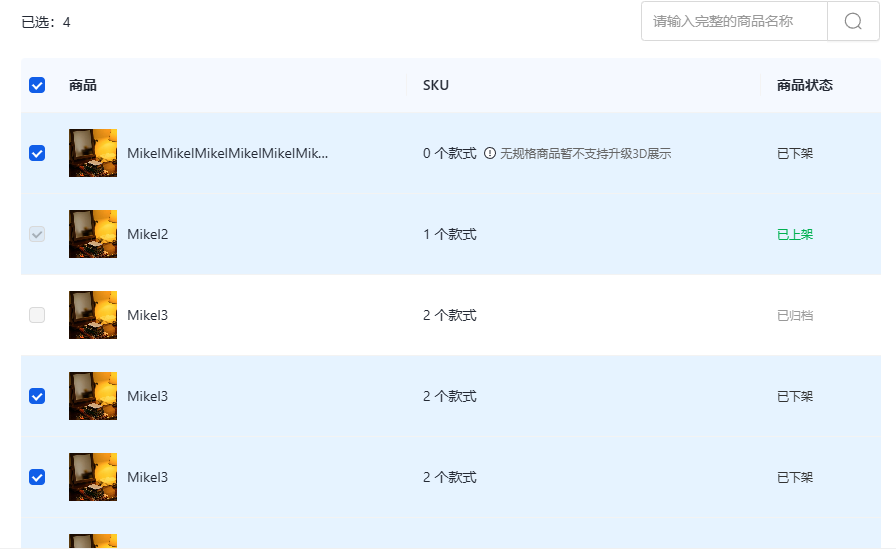
Vue中使用antd-table组件实现数据选择、禁用、已选择禁用-demo
实现案例 实现过程 表格代码 关键代码 :row-selection="rowSelection" <div><div class="flex items-center justify-between pt-[24px] pb-[16px]"><p>已选:{{ keysNum }}</p><a-input-search v-model:value="productN…...
C语言--统计输入字符串中的单词个数
输入 输入:大小写字母以及空格,单词以空格分隔 输出:单词个数 代码 如果不是空格且inWord0说明是进入单词的第一个字母,则单词总数加一。 如果是空格,证明离开单词,inWord 0。 #include <stdio.h&g…...
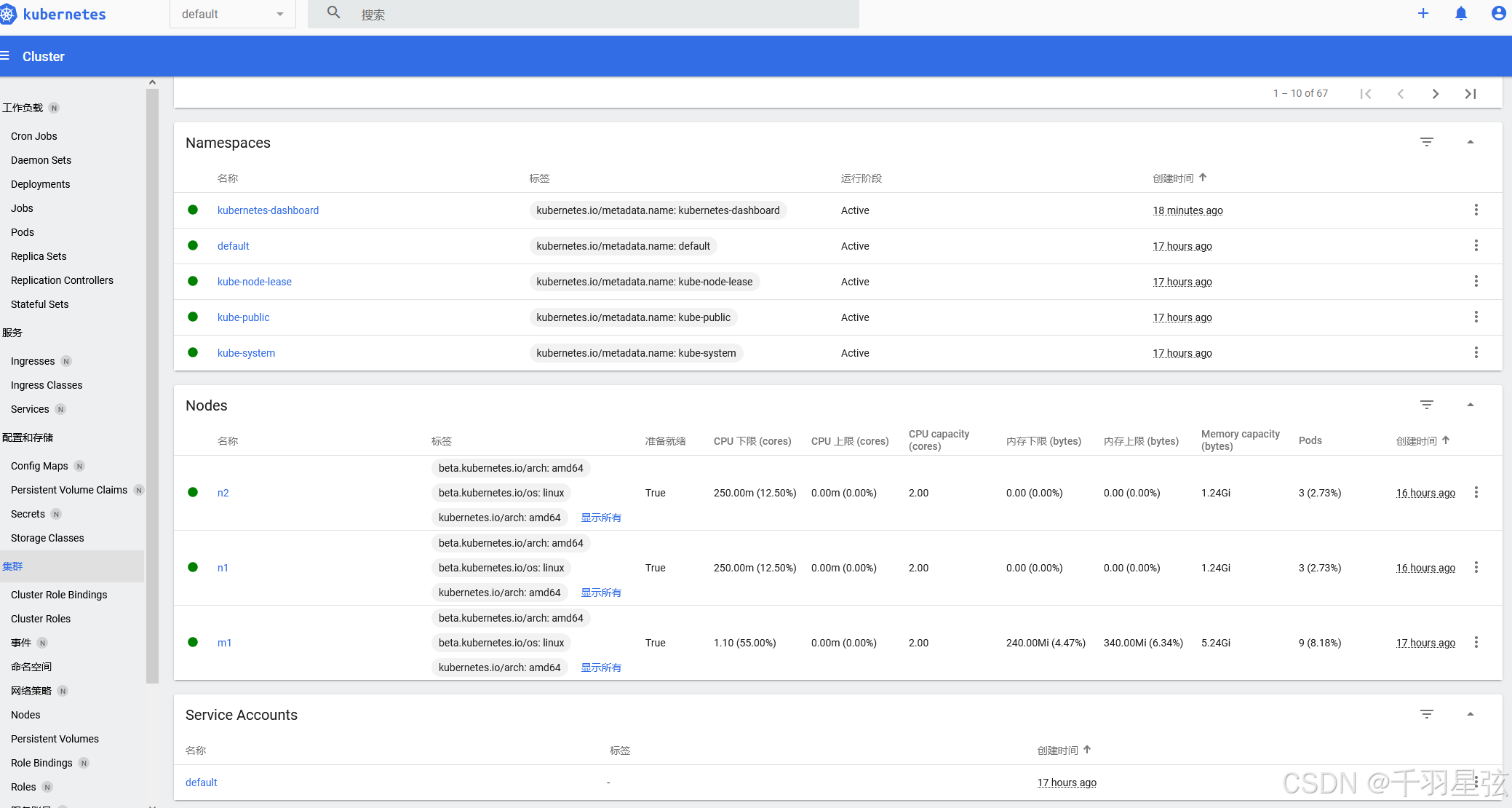
Kubernetes 集群搭建(三):使用dashboard用户界面(需要访问外网获取yaml)
(一)简介 K8s Dashboard是Kubernetes提供的一种基于Web的用户界面工具,用于可视化地管理和监控Kubernetes集群 主要功能: 资源查看与管理: 查看Kubernetes集群中的各种资源,如节点、Pod、服务、部署等。 对…...
Debian 12 服务器搭建Beego环境
一、Debian 12系统准备 1.更新系统 #apt update && apt upgrade -y 2.安装基础工具 #apt install -y git curl wget make gcc 二、安装Go环境 Go语言的镜像官网:https://golang.google.cn/ 1.下载go最新版 #cd /usr/local/src #wget -o https://golang.go…...

游戏引擎学习第208天
运行游戏并回顾我们的情况 今天,我们将继续完成之前中断的调试输出工作。最近的工作偏离了一些,展示了如何进行元编程的实践,主要涉及了一个小的解析器。尽管这个解析器本身是一个玩具,但它展示了如何完成一个完整的循环…...

【在校课堂笔记】Python 第 7 节课 总结
- 第 85 篇 - Date: 2025 - 04 - 06 Author: 郑龙浩/仟墨 【Python 在校课堂笔记】 南山-第 7 节课 上课时间: 2025-03-27 文章目录 南山-第 7 节课一 99乘法表 –> 三角二 函数1 已接触的函数,部分举例2 自定函数的定义与使用自定义函数:举例 3 带参数的4 阶乘…...

评价区动态加载是怎么实现的?
淘宝商品评价区的动态加载是通过一系列前端技术和后端接口实现的,其核心目的是提升用户体验和页面性能。以下是其实现原理和关键技术的详细解析: 1. 前端实现:AJAX 和 JavaScript 淘宝利用 AJAX(Asynchronous JavaScript and XM…...
【 <二> 丹方改良:Spring 时代的 JavaWeb】之 Spring Boot 中的监控:使用 Actuator 实现健康检查
<前文回顾> 点击此处查看 合集 https://blog.csdn.net/foyodesigner/category_12907601.html?fromshareblogcolumn&sharetypeblogcolumn&sharerId12907601&sharereferPC&sharesourceFoyoDesigner&sharefromfrom_link <今日更新> 一、引子&…...