UniAD:自动驾驶的统一架构 - 创新与挑战并存
引言
自动驾驶技术正经历一场架构革命。传统上,自动驾驶系统采用模块化设计,将感知、预测和规划分离为独立组件。而上海人工智能实验室的OpenDriveLab团队提出的UniAD(Unified Autonomous Driving)则尝试将这些任务整合到一个统一框架中。本文将从多角度审视UniAD,既探讨其创新点,也分析落地应用面临的实际挑战。
1.理解"端到端"的真正含义
在自动驾驶语境中,"端到端"常指系统能直接从传感器输入到驾驶控制输出建立映射。UniAD在这方面采取了折中方案:
- 传统模块化方法:各模块严格分离,独立优化,可能导致信息丢失和错误累积
- 纯端到端方法:直接从传感器数据映射到控制命令,缺乏可解释性和安全保障
- UniAD方法:保留模块化结构,但通过统一特征表示和共同训练促进模块间协作
值得注意的是,UniAD并非完全意义上的端到端系统。它仍然保留明确的中间表示和模块划分,更准确地说是一种"统一模块化"设计。这种设计既追求端到端优化的性能提升,又保留模块化的可解释性。
2. UniAD根本目的
UniAD(Unified Autonomous Driving)是一个端到端自动驾驶框架,旨在通过统一架构解决传统模块化系统存在的信息割裂和错误累积问题。其核心用途是:
将感知(检测、追踪、地图构建)、预测(轨迹、占用)和规划(路径生成)三大任务整合到单一网络中,通过协同优化提升自动驾驶系统的整体性能。
3. UniAD具体功能实现
UniAD通过以下具体功能支撑自动驾驶决策:
-
动态环境建模
实时检测并追踪车辆、行人等动态物体(TrackFormer),同时构建在线高精地图(MapFormer),在无预存地图时仍能理解道路结构。
例:城市施工路段临时改道时,仍能识别锥桶围栏和新车道线。 -
多智能体交互预测
预测周围车辆/行人未来5-8秒的多模态轨迹(MotionFormer),并生成未来场景的3D占用网格(OccFormer)。
例:预判前方车辆可能急刹或变道,提前规划避让路径。 -
安全路径规划
综合所有信息,生成符合车辆动力学、避开占用区域且遵守交规的驾驶路径(Planner)。
例:在十字路口同时考虑对向左转车辆、闯红灯电动车和斑马线行人,计算最优通行时机。
4. 典型应用场景
UniAD特别擅长处理传统系统易失效的复杂场景:
| 场景类型 | UniAD解决方案 | 传统系统痛点 |
|---|---|---|
| 密集车流变道 | 通过MotionFormer预测周围车辆加速/让行意图,OccFormer识别安全变道空间 | 模块化系统常因预测与规划信息不同步导致犹豫或急刹 |
| 无保护左转 | MapFormer在线识别无信号灯路口结构,Planner结合行人/对向车流预测生成博弈式轨迹 | 依赖规则引擎的系统易陷入"鬼探头"困境 |
| 施工路段通行 | TrackFormer持续追踪移动的锥桶和工程车,MapFormer实时更新可行驶区域 | 基于预存地图的系统可能误判封闭车道 |
| 夜间低能见度 | BEV特征融合多摄像头数据增强感知,OccFormer通过运动模式补全遮挡区域 | 纯激光雷达方案在雨雾中性能下降显著 |
5.UniAD的核心架构
UniAD采用"规划导向"的设计理念,其架构包含五个主要模块:
- TrackFormer:执行检测和多目标追踪,使用轨迹查询从BEV(鸟瞰图)特征中获取场景信息。
- MapFormer:负责在线地图构建,将道路元素表示为地图查询,执行全景分割任务。
- MotionFormer:捕获场景中多个代理的交互关系,预测每个代理的未来轨迹。
- OccFormer:预测多步未来占用情况,并保留代理身份信息。
- Planner:利用前面模块的信息生成最终规划路径,基于牛顿法优化轨迹以避免碰撞。
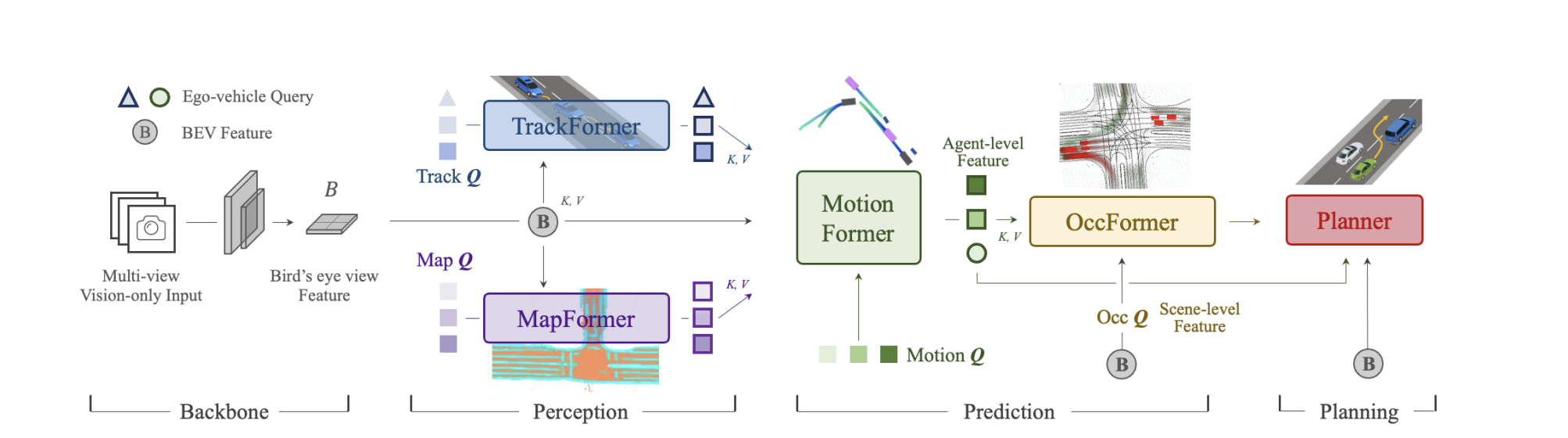
工作流程上,系统从多相机图像开始,通过BEVFormer转换为统一的鸟瞰图特征,然后依次通过各模块处理,最终生成行驶路径。
6.UniAD的优势与创新
6.1 技术创新点
- 查询机制:使用查询作为模块间接口,使系统能够灵活建模多个代理间的交互
- 非线性优化:在运动预测和规划模块采用优化策略,使轨迹符合物理可行性
- 像素-代理交互:在占用预测中设计了融合场景级和代理级理解的机制
6.2 理论上的应用优势
- 信息共享:各模块共享底层特征表示,减少信息损失
- 联合优化:整个系统端到端训练,所有模块协同优化
- 可解释性:保留明确中间表示,比纯黑盒端到端系统更可解释
7.实际落地面临的挑战
然而,从学术创新到工业应用,UniAD面临诸多现实挑战:
7.1 计算资源与成本
UniAD基于多个Transformer模块,计算需求相当可观:
- 可能需要高端计算平台,成本和功耗显著高于当前量产方案
- 对车载散热系统提出严苛要求
- 在算力优化和成本控制方面面临挑战
7.2 安全验证
传统模块化系统可通过ISO 26262等标准对各模块独立认证,而UniAD这样的统一系统面临更复杂的安全验证挑战:
- 联合训练机制可能导致系统行为难以预测
- 传统形式化验证方法可能无法应用
- 安全冗余设计需要重新思考
7.3 实验室性能与实际表现的差距
虽然UniAD在nuScenes基准测试中表现优异,但基准测试与实际道路环境存在显著差异:
- nuScenes数据集可能未充分覆盖极端天气、复杂交通规则等场景
- 标注质量和数据集偏差可能影响实际性能
- 长尾场景(如儿童突然闯入、非常规车辆)的处理能力有待验证
7.4 伦理决策与复杂交互
自动驾驶系统需要处理复杂的道德和伦理判断,这些问题在UniAD中尚未得到明确解决:
- 不可避免的碰撞情况下如何做出伦理决策
- 如何理解和适应各地区不同的驾驶文化和习惯
- 与人类驾驶员的交互和沟通机制
8. 与其他自动驾驶方案的比较
将UniAD与业界其他方案对比:
| 方案 | 架构特点 | 优势 | 劣势 |
|---|---|---|---|
| UniAD | 统一模块化 | 模块协同优化,减少信息损失 | 计算需求高,安全验证复杂 |
| 传统模块化 (Waymo) | 严格模块分离 | 安全验证成熟,失效模式明确 | 模块间信息传递可能有损失 |
| 纯视觉端到端 (Tesla) | 直接从视觉到控制 | 硬件需求较低,数据驱动 | 可解释性低,需海量数据 |
| 基于HD地图 (Mobileye) | 依赖高精度地图 | 定位精确,规划可靠 | 对地图依赖高,更新维护成本大 |
9. 未来发展方向
UniAD为自动驾驶架构带来了新思路,未来可能的发展方向包括:
- 计算优化:开发更高效算法和专用硬件,降低系统资源需求
- 安全框架:构建适合统一架构的安全验证方法和标准
- 数据多样性:扩展训练数据集,覆盖更多长尾场景和地区特性
- 可配置统一:设计在不同算力平台上可自适应调整的灵活架构
10. 结论
UniAD代表了自动驾驶架构设计的一次重要尝试,它打破了传统模块化系统的边界,探索了更紧密集成的可能性。从学术角度看,UniAD在nuScenes等基准测试上的出色表现证明了这种方法的潜力。
然而,从工程实现角度来看,UniAD距离量产应用仍有相当距离。计算需求、安全验证、实际道路适应性等问题都需要解决。自动驾驶发展需要学术创新与工程现实的平衡,不应过分夸大任何单一方法的革命性。
未来的自动驾驶系统可能会借鉴UniAD的部分理念,同时保留传统方法的工程实用性,形成更平衡的解决方案。作为研究人员和工程师,我们应该既欣赏UniAD等创新架构的理论价值,也务实地评估其在实际应用中的局限性。
自动驾驶的终极目标是安全、可靠、普惠的智能出行,这需要理论创新与工程实践的共同努力。
相关文章:
UniAD:自动驾驶的统一架构 - 创新与挑战并存
引言 自动驾驶技术正经历一场架构革命。传统上,自动驾驶系统采用模块化设计,将感知、预测和规划分离为独立组件。而上海人工智能实验室的OpenDriveLab团队提出的UniAD(Unified Autonomous Driving)则尝试将这些任务整合到一个统一…...
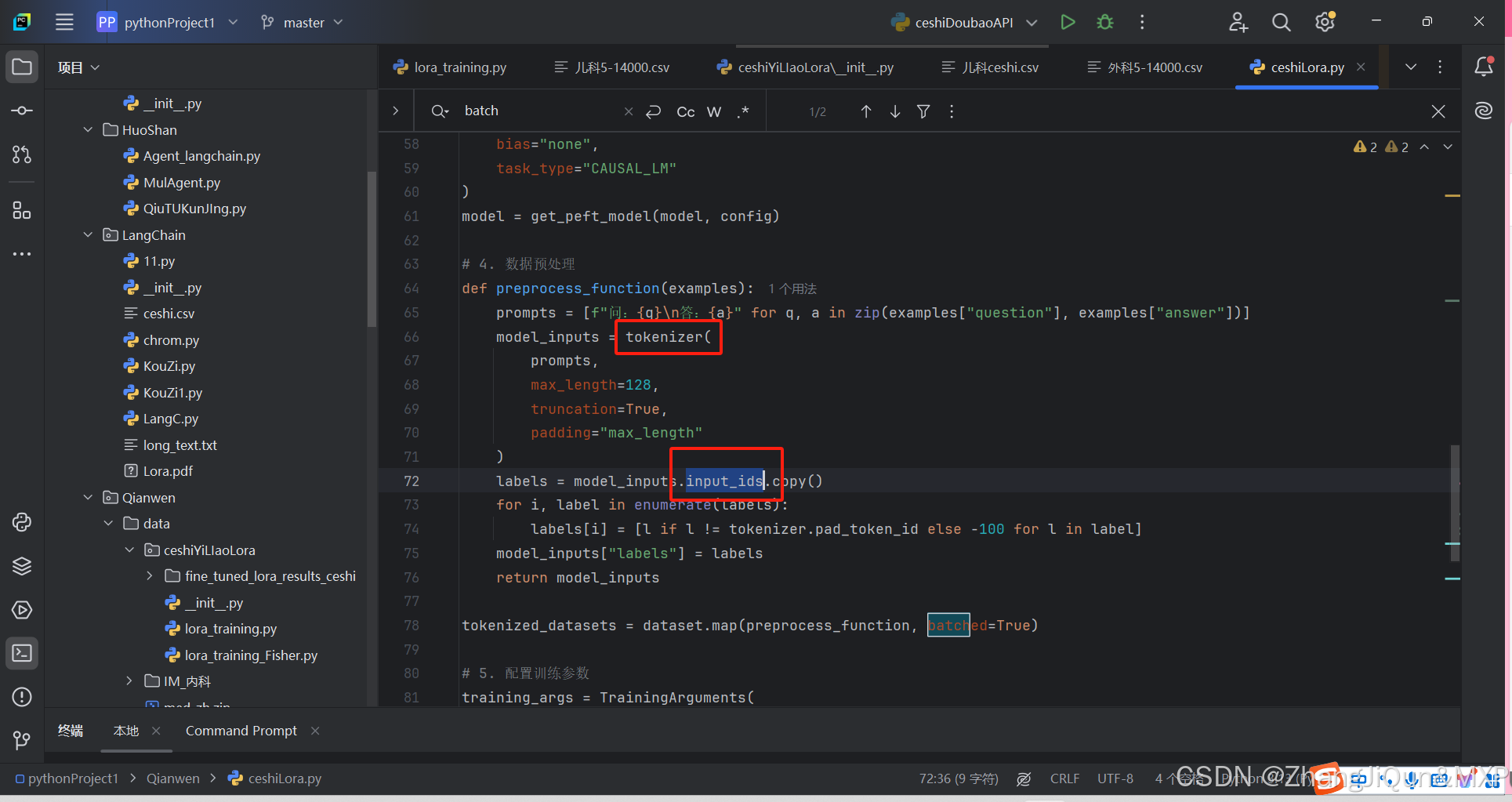
transformers 中的 input_ids 和 labels 是什么
transformers 中的 input_ids 和 labels 是什么 input_ids 是输入文本的数字化表示,而 labels 是模型训练的目标值 在自然语言处理(NLP)和使用 transformers 库进行模型训练时,tokenizer = AutoTokenizer.from_pretrained(model_path) 这行代码是用于从预训练模型路径加载…...
各种排序思路及实现
目录 1.排序概念常见的排序算法 2.常见排序算法实现(1)插入排序直接插入排序希尔排序(缩小增量排序) (2)选择排序直接选择排序堆排序 (3)交换排序冒泡排序快速排序(hoare…...

golang 采用use-go/onvif获取RTSP流
采用https://github.com/use-go/onvif得到完整的RTSP流的地址 全局变量UseGoMain 函数GetDeviceInformation 函数GetRTSPUri 函数 全局变量 这些变量用来设定 ONVIF 设备的连接信息,包含设备地址、用户名和密码 var deviceXaddr "*92.1*8.11*.12*:80" …...

虚幻基础:碰撞帧运算
能帮到你的话,就给个赞吧 😘 文章目录 碰撞碰撞盒线段检测 帧运算:每个程序流就是一帧的计算结果速度过快时(10000),导致每帧移动过大(83),从而导致碰撞盒错过而没有碰撞速度快的碰撞要用线段检测 碰撞 碰撞盒 线段检…...
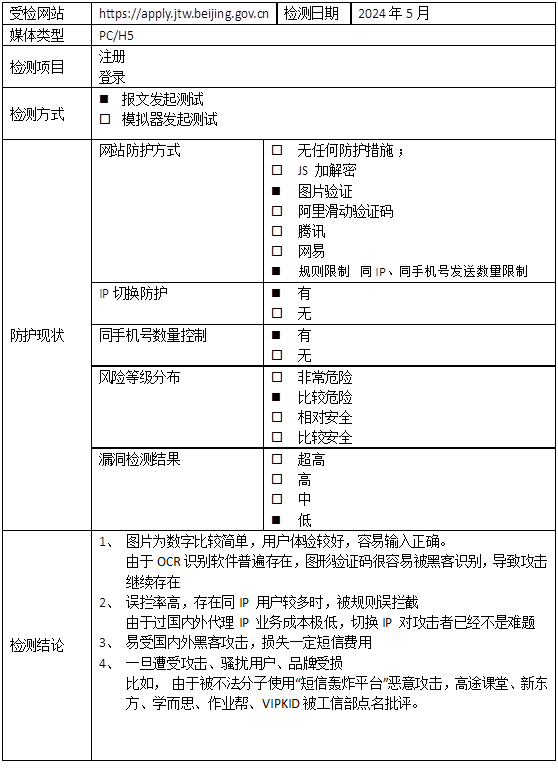
【北京市小客车调控网站-注册/登录安全分析报告】
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 暴力破解密码,造成用户信息泄露短信盗刷的安全问题,影响业务及导致用户投诉带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞…...

西湖大学团队开源SaProt等多款蛋白质语言模型,覆盖结构功能预测/跨模态信息搜索/氨基酸序列设计等
2025 年 3 月 22—23 日,上海交通大学「AI 蛋白质设计峰会」正式举行。 本次峰会汇聚了来自清华大学、北京大学、复旦大学、浙江大学、厦门大学等知名高校的 300 多位专家学者,以及 200 余位行业领军企业代表和技术研发人员,深入探讨了 AI 在…...

算法--递归实现【DFS】
题目:指数型枚举 从 1∼n这 n 个整数中随机选取任意多个,输出所有可能的选择方案。 输入格式 输入一个整数 n。 输出格式 每行输出一种方案。 同一行内的数必须升序排列,相邻两个数用恰好 11 个空格隔开。 对于没有选任何数的方案,…...
一个批量文件Dos2Unix程序(Microsoft Store,开源)
这个程序可以把整个目录的文本文件改成UNIX格式,源码是用C#写的。 目录 一、从Microsoft Store安装 二、从github获取源码 三、功能介绍 3.1 运行 3.2 浏览 3.3 转换 3.4 转换(无列表) 3.5 取消 3.6 帮助 四、源码解读 五、讨论和…...

无法读取库伦值文件节点解决方案
读取库伦值的目的是为了换算成电流,量化场景功耗用途 1.报错日志 /power_log/debuglogger$ adb shell dmesg | grep -Ei "avc..system_server"[ 79.942272] logd.auditd: type1400 audit(1744279324.832:7149): avc: denied { read } for comm"…...
Linux系统学习Day2——在Linux系统中开发OpenCV
一、OpenCV简介 OpenCV(Open Source Computer Vision Library)是一个开源的跨平台计算机视觉和机器学习库,广泛应用于图像处理、视频分析、物体检测等领域。它提供了丰富的算法和高效的工具集,支持C、Python等多种语言,…...
【图像分类】【深度学习】图像分类评价指标
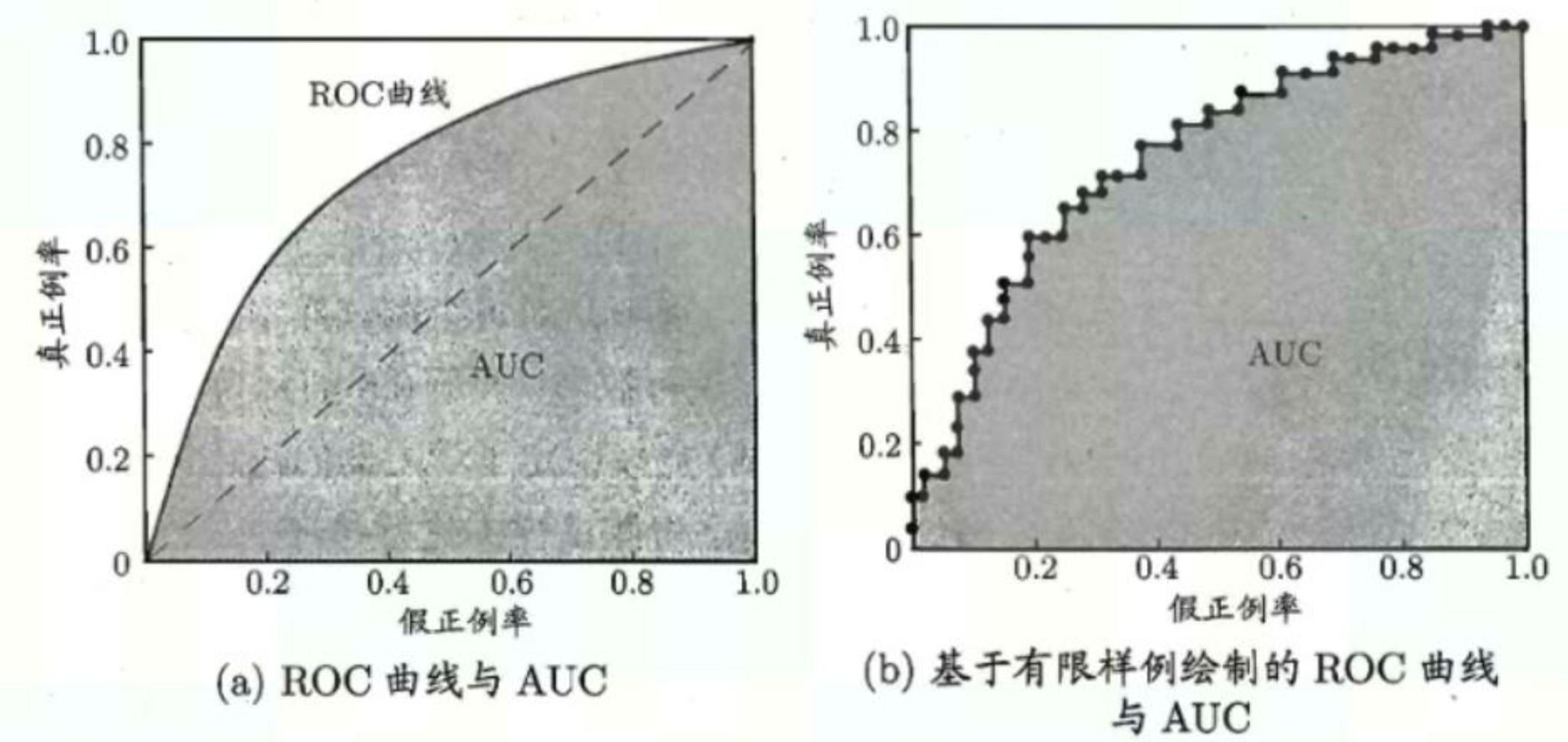
【图像分类】【深度学习】图像分类评价指标 文章目录 【图像分类】【深度学习】图像分类评价指标前言二分类评价指标Accuracy(准确率/精度)Precision(精确率/查准率)Recall(召回率/查全率)F1-ScoreAUC-ROC曲线(Area Under the Curv-Receiver Operating Characteristic Curve)二…...

一组可能的机器学习问题列表
线性回归与多项式拟合的关系最小二乘法在机器学习中的应用梯度下降是如何实现的贝叶斯分类器的应用场景高斯分布与判定在哪里用到模型的评估有哪些参数误差中的偏差和方差定义训练集分组的快捷方式如何度量模型性能查准率查全率的定义roc,aux的含义正则化是什么意思k均值用来解…...
)
context上下文(一)
创建一个基础的context 使用BackGround函数,BackGround函数原型如下: func Background() Context {return backgroundCtx{} } 作用:Background 函数用于创建一个空的 context.Context 对象。 context.Background() 函数用于获取一个空的 cont…...
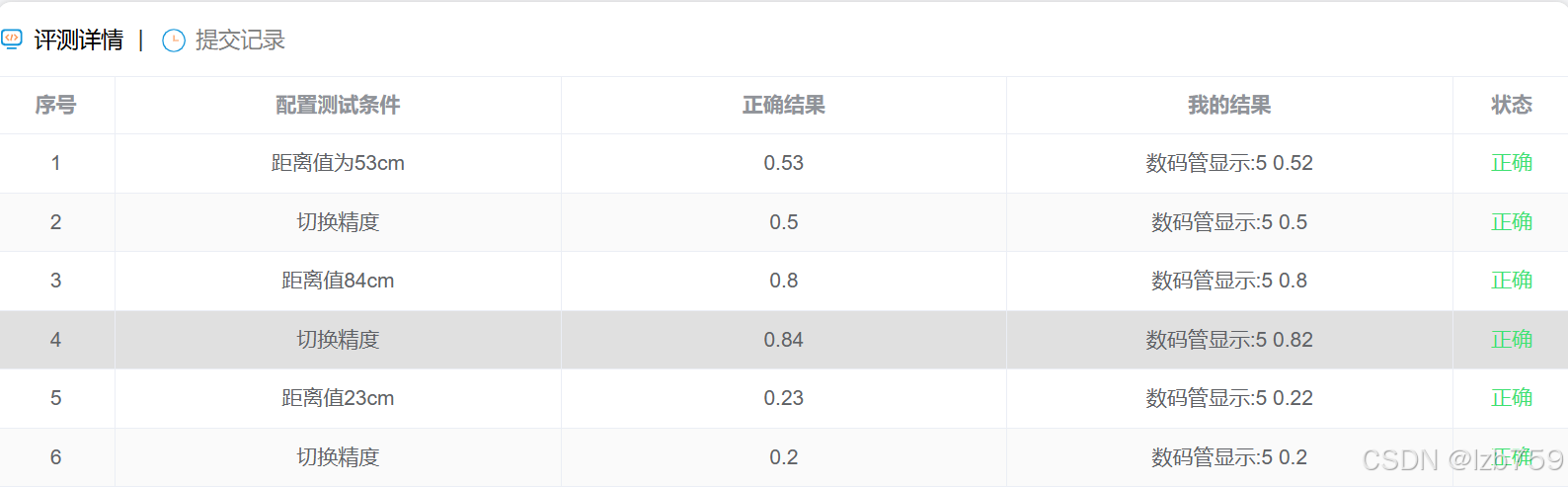
蓝桥杯单片机刷题——按键控制距离显示精度
设计要求 驱动超声波传感器,启动距离测量功能,并将其结果显示到数码管上,距离数据单位为m。 按键“S4”定义为“切换”按键,通过此按键切换距离的显示精度(一位或两位小数)。切换顺序如图所示。 数码管显示格式如下图…...
el-time-picker标签的使用
需求: 实现培训日期,用户可以选择某一天的日期,这个比较简单 <el-form-item label"培训日期" prop"startTime"><el-date-picker clearablev-model"form.startTime"type"date"placeholder…...
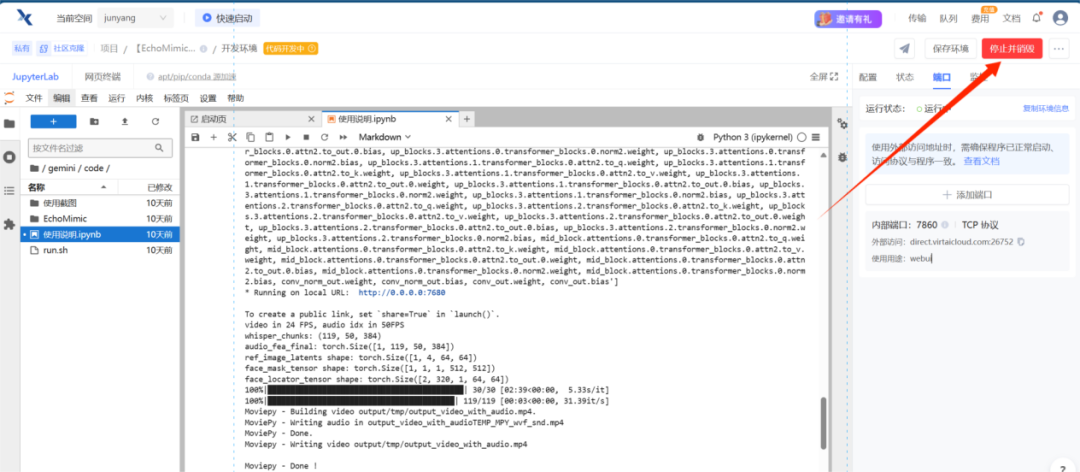
云平台一键部署【OmniGen】多功能图像生成模型(2025更新版)
OmniGen 是智源推出的一款全新的扩散模型架构,专注于统一图像生成。它简化了图像生成的复杂流程,通过一个框架处理多种任务,例如文本生成图像、图像编辑和基于视觉条件的生成等。此外,OmniGen 通过统一学习结构实现了知识迁移&…...

C/C++ 知识点:解释型语言与编译型语言
文章目录 一、解释型语言与编译型语言1、概念2、主要区别3、示例对比 一、解释型语言与编译型语言 1、概念 解释型语言 代码逐行解释执行,无需提前编译。如:Python、JavaScript、Ruby。 编译型语言 代码先编译成机器码,再直接执行。如&…...
算法训练之动态规划(四)——简单多状态问题
♥♥♥~~~~~~欢迎光临知星小度博客空间~~~~~~♥♥♥ ♥♥♥零星地变得优秀~也能拼凑出星河~♥♥♥ ♥♥♥我们一起努力成为更好的自己~♥♥♥ ♥♥♥如果这一篇博客对你有帮助~别忘了点赞分享哦~♥♥♥ ♥♥♥如果有什么问题可以评论区留言或者私信我哦~♥♥♥ ✨✨✨✨✨✨ 个…...

uniapp离线打包提示未添加videoplayer模块
uniapp中使用到video标签,但是离线打包放到安卓工程中,运行到真机中时提示如下: 解决方案: 1、把media-release.aar、weex_videoplayer-release.aar放到工程的libs目录下; 文档:https://nativesupport.dcloud.net.cn/…...

5. 蓝桥公园
题目描述 小明喜欢观景,于是今天他来到了蓝桥公园。 已知公园有 N 个景点,景点和景点之间一共有 M 条道路。小明有 Q 个观景计划,每个计划包含一个起点 stst 和一个终点 eded,表示他想从 stst 去到 eded。但是小明的体力有限&am…...

机器人零位标定修正流程介绍
如果想看运动学标定可以看看 机器人运动学参数标定, 一次性把运动学参数和零位标定等一起标定求解. 1. 零位标定 零位标定是机器人运动学标定中的一个重要步骤,其目的是校正机器人关节的初始位置误差。以下是需要进行零位标定的主要原因: 制造误差 在机…...

大疆无人机系列知识
目录 知识 开发者文档 (上云) 无人机的应用 知识 大疆行业无人机接入音视频平台协议详解_大疆无人机 视频流-CSDN博客 开发者文档 (上云) 上云API 无人机的应用 【大疆无人机地图测绘技术学习:高精度、高效率的…...
深入 C++ 线程库:从创建到同步的探索之旅
目录 创建多线程 获取线程返回值 1.传指针 2.传引用 原子操作 互斥量 互斥量(Mutex)的基本概念 mutex类型介绍 锁的类型 互斥锁(Mutex) 自旋锁(Spin Lock) 读写锁(Read - Write Lo…...
【2025年认证杯数学中国数学建模网络挑战赛】A题 解题建模过程与模型代码(基于matlab)
目录 【2025年认证杯数学建模挑战赛】A题解题建模过程与模型代码(基于matlab)A题 小行星轨迹预测解题思路第一问模型与求解第二问模型与求解 【2025年认证杯数学建模挑战赛】A题 解题建模过程与模型代码(基于matlab) A题 小行星轨…...

Rust重定义数据库内核:从内存安全到性能革命的破界之路
Rust语言正在颠覆传统数据库开发范式,其独特的所有权系统与零成本抽象能力,为攻克C/C时代遗留的内存泄漏、并发缺陷等顽疾提供全新解决方案。本文通过TiKV、Materialize等新一代数据库核心组件的实践案例,剖析Rust如何重塑存储引擎、查询优化…...
初治成人患者诊疗中的应用研究)
大模型在慢性髓细胞白血病(CML)初治成人患者诊疗中的应用研究
目录 一、引言 1.1 研究背景与意义 1.2 国内外研究现状 1.3 研究目的与内容 二、大模型技术与 CML 相关知识 2.1 大模型技术原理与特点 2.2 CML 的病理生理与诊疗现状 三、术前风险预测与手术方案制定 3.1 术前数据收集与预处理 3.2 大模型预测术前风险 3.3 根据预测…...
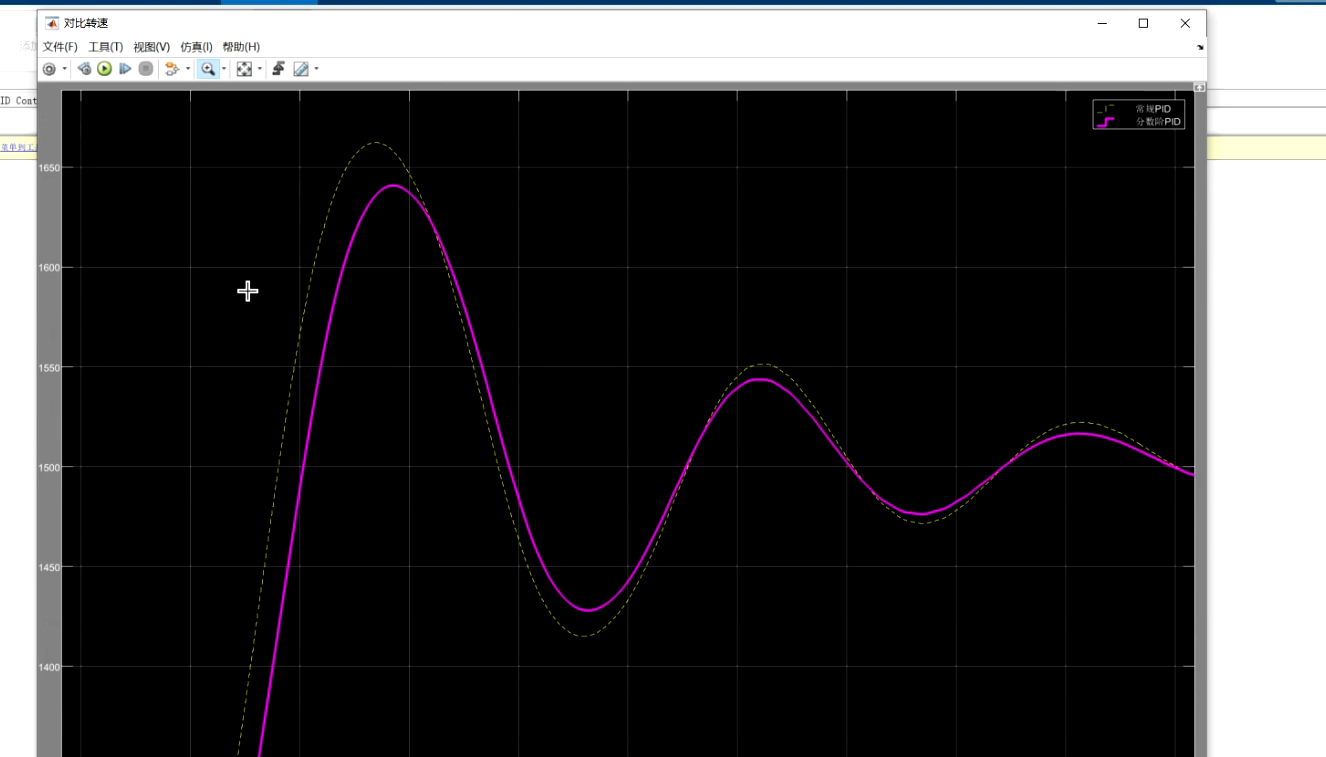
Matlab 分数阶PID控制永磁同步电机
1、内容简介 Matlab 203-分数阶PID控制永磁同步电机 可以交流、咨询、答疑 2、内容说明 略 3、仿真分析 略 4、参考论文 略...
)
GO语言入门-反射5(结构体的Tag)
12.5 结构体的 Tag 在定义结构体类型时,可以在字段后面加上一个字符串,称为 Struct Tag。Tag 主要用来补充附加信息。 Tag 由多个 key - value 构成,并以空格来分隔,key 和 value 之间用英文的冒号分隔。其格式如下:…...

免费下载 | 2025电力数据资产管理体系白皮书
本文是一份关于2025年电力数据资产管理体系的白皮书,详细阐述了电力数据要素和数据资产管理的现状、挑战、发展进程以及电网数据资产管理体系的构建与实践。白皮书强调了数据作为生产要素的重要性,并提出了电网数据资产管理体系的创新模式,旨…...