H.265硬件视频编码器xk265代码阅读 - 帧内预测
源代码地址: https://github.com/openasic-org/xk265
帧内预测具体逻辑包含在代码xk265\rtl\rec\rec_intra\intra_pred.v 文件中。
module intra_pred() 看起来是每次计算某个4x4块的预测像素值。
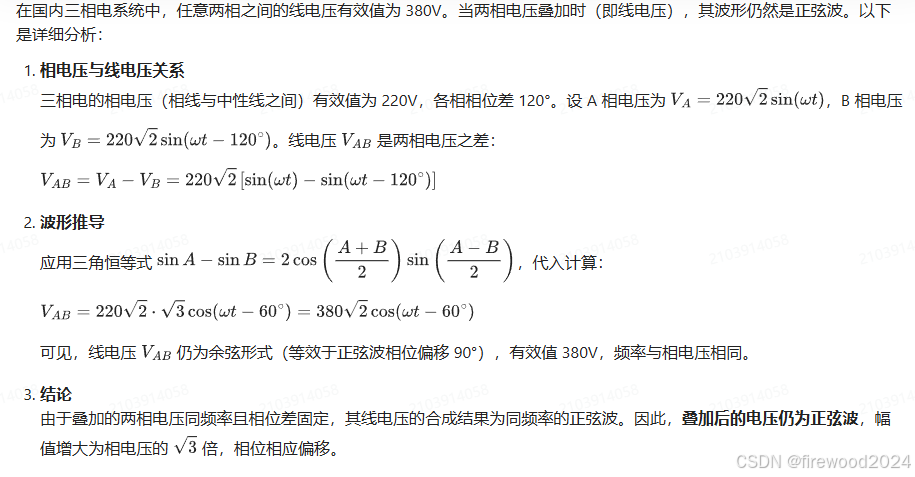
以下代码用来算每个pred_angle的具体数值,每个mode_i对应的pred_angle参考下图所示:
module intra_pred( ... )
...
//lookup table to get pred_angle
always @( * ) begincase (mode_i)2 ,34:pred_angle=7'd32; 11,25:pred_angle=-7'd2;3 ,33:pred_angle=7'd26; 12,24:pred_angle=-7'd5;4 ,32:pred_angle=7'd21; 13,23:pred_angle=-7'd9;5 ,31:pred_angle=7'd17; 14,22:pred_angle=-7'd13;6 ,30:pred_angle=7'd13; 15,21:pred_angle=-7'd17;7 ,29:pred_angle=7'd9; 16,20:pred_angle=-7'd21;8 ,28:pred_angle=7'd5; 17,19:pred_angle=-7'd26;9 ,27:pred_angle=7'd2; 18: pred_angle=-7'd32;10,26:pred_angle=7'd0;default:pred_angle=7'd0;endcase
end 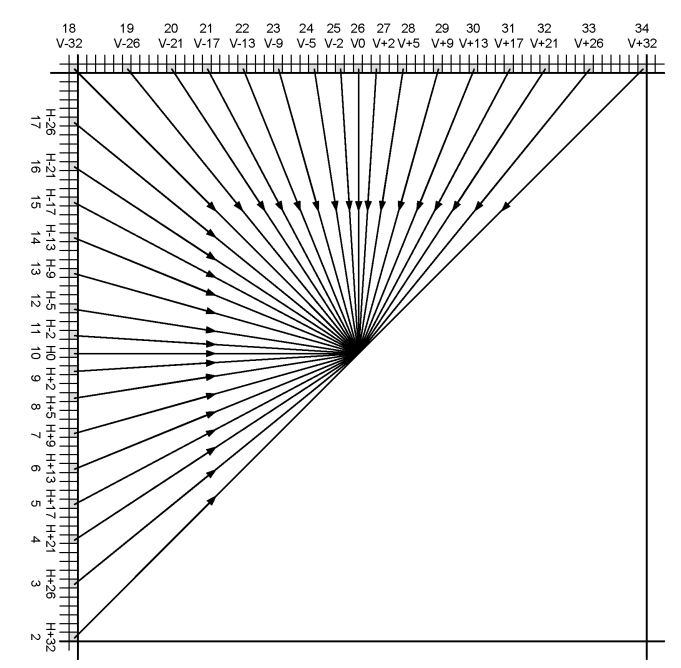
以下代码用于获取当前4x4块的第一行四个像素在大块中的水平位置,其中size_i用于表示大块的大小。
//********************************************************************************
//get the location information of current 4x4 block
always @( * ) begin//xcase(size_i)2'b00:begin//4x4x0='d0; x1='d1; x2='d2; x3='d3;end2'b01:begin//8x8if(!i4x4_x_i[0]) beginx0='d0; x1='d1; x2='d2; x3='d3;endelse beginx0='d4; x1='d5; x2='d6; x3='d7;endend2'b10:begin//16x16case(i4x4_x_i[1:0])2'b00:beginx0='d0; x1='d1; x2='d2; x3='d3;end2'b01:beginx0='d4; x1='d5; x2='d6; x3='d7;end2'b10:beginx0='d8; x1='d9; x2='d10; x3='d11;end2'b11:beginx0='d12; x1='d13; x2='d14; x3='d15;endendcaseend2'b11:begin//32x32case(i4x4_x_i[2:0])3'b000:beginx0='d0; x1='d1; x2='d2; x3='d3;end3'b001:beginx0='d4; x1='d5; x2='d6; x3='d7;end3'b010:beginx0='d8; x1='d9; x2='d10; x3='d11;end3'b011:beginx0='d12; x1='d13; x2='d14; x3='d15;end3'b100:beginx0='d16; x1='d17; x2='d18; x3='d19;end3'b101:beginx0='d20; x1='d21; x2='d22; x3='d23;end3'b110:beginx0='d24; x1='d25; x2='d26; x3='d27;end3'b111:beginx0='d28; x1='d29; x2='d30; x3='d31;endendcaseendendcase
end以下代码用于获取当前4x4块的第一列四个像素在大块中的垂直位置,其中size_i用于表示大块的大小。
always @( * ) begin//ycase(size_i)2'b00:begin//4x4y0='d0; y1='d1; y2='d2; y3='d3;end2'b01:begin//8x8if(!i4x4_y_i[0]) beginy0='d0; y1='d1; y2='d2; y3='d3;endelse beginy0='d4; y1='d5; y2='d6; y3='d7;endend2'b10:begin//16x16case(i4x4_y_i[1:0])2'b00:beginy0='d0; y1='d1; y2='d2; y3='d3;end2'b01:beginy0='d4; y1='d5; y2='d6; y3='d7;end2'b10:beginy0='d8; y1='d9; y2='d10; y3='d11;end2'b11:beginy0='d12; y1='d13; y2='d14; y3='d15;endendcaseend2'b11:begin//32x32case(i4x4_y_i[2:0])3'b000:beginy0='d0; y1='d1; y2='d2; y3='d3;end3'b001:beginy0='d4; y1='d5; y2='d6; y3='d7;end3'b010:beginy0='d8; y1='d9; y2='d10; y3='d11;end3'b011:beginy0='d12; y1='d13; y2='d14; y3='d15;end3'b100:beginy0='d16; y1='d17; y2='d18; y3='d19;end3'b101:beginy0='d20; y1='d21; y2='d22; y3='d23;end3'b110:beginy0='d24; y1='d25; y2='d26; y3='d27;end3'b111:beginy0='d28; y1='d29; y2='d30; y3='d31;endendcaseendendcase
end
以下代码用于选择参考像素的位置: model_i >=18,则参考水平像素行,否则参考垂直像素列,具体细节可以参考下图。
always @(posedge clk or negedge rst_n) begin//help to choose the reference pixelif(!rst_n) begindelta_idx_r <= 'd0;endelse beginif(mode_i>=18)delta_idx_r <= {1'b0,x0};elsedelta_idx_r <= {1'b0,y0};end
end
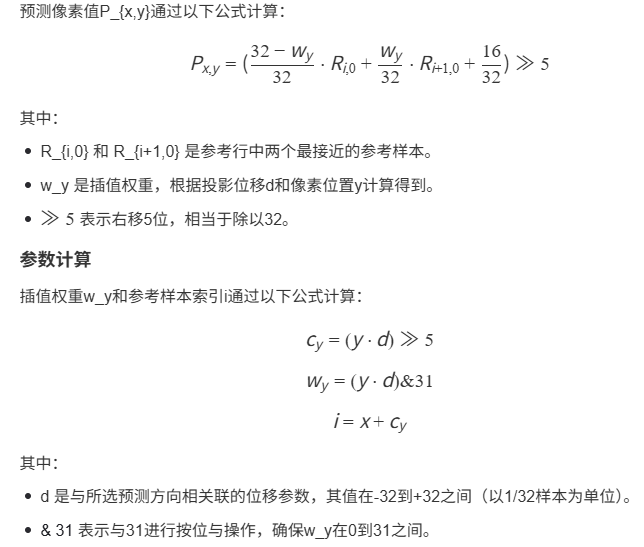
以下代码用于计算加权factor和偏移量idx,原理可以参考HM或者论文Intra Coding of the HEVC Standard。
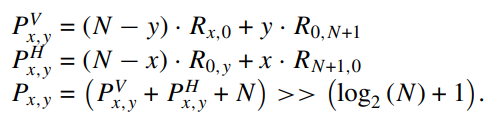
预测像素值P_{x,y}通过以下公式计算:
//*********************************************************************************
//calculate idx and ifact for intra prediction
// 将 x0~x3 和 y0~y3 的值进行符号扩展(sign extension),确保它们在后续计算中不会因为位宽不足而丢失精度。
assign x0_sign_w={1'b0,x0}; // 在x0最高位前添加一个0,变为无符号数;
assign x1_sign_w={1'b0,x1};
assign x2_sign_w={1'b0,x2};
assign x3_sign_w={1'b0,x3};assign y0_sign_w={1'b0,y0};
assign y1_sign_w={1'b0,y1};
assign y2_sign_w={1'b0,y2};
assign y3_sign_w={1'b0,y3};always @(posedge clk or negedge rst_n) beginif(!rst_n) beginfact0<='d0; idx0<='d0;fact1<='d0; idx1<='d0;fact2<='d0; idx2<='d0;fact3<='d0; idx3<='d0;endelse beginif (mode_i >= 18) beginfact0<=((y0+1)*pred_angle);fact1<=((y1+1)*pred_angle);fact2<=((y2+1)*pred_angle);fact3<=((y3+1)*pred_angle);idx0<=((y0_sign_w+1)*pred_angle)>>>5;idx1<=((y1_sign_w+1)*pred_angle)>>>5;idx2<=((y2_sign_w+1)*pred_angle)>>>5;idx3<=((y3_sign_w+1)*pred_angle)>>>5;endelse beginfact0<=((x0+1)*pred_angle);fact1<=((x1+1)*pred_angle);fact2<=((x2+1)*pred_angle);fact3<=((x3+1)*pred_angle);idx0<=((x0_sign_w+1)*pred_angle)>>>5;idx1<=((x1_sign_w+1)*pred_angle)>>>5;idx2<=((x2_sign_w+1)*pred_angle)>>>5;idx3<=((x3_sign_w+1)*pred_angle)>>>5;endend
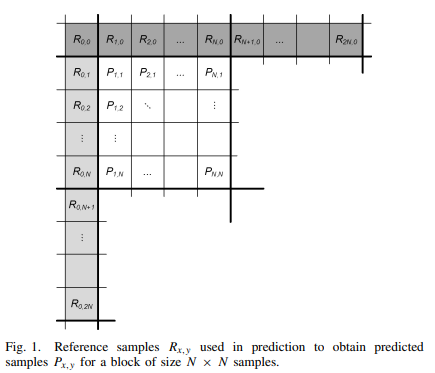
end以下代码用于将输入的预测像素排到ref_lxx_w和ref_txx_w寄存器中。ref_l0_w到ref_lN-1_w 从输入的ref_lN-1_i中拷贝, ref_lN_w到ref_l2N-1_w 从输入的ref_b0N_i中拷贝,因为参考像素的行和列的宽度是块大小的两倍(如下图所示)。
//**********************************************************************************
//get the real reference pixel
always @( * ) beginref_l00_w = 'd0; ref_l04_w = 'd0; ref_l08_w = 'd0; ref_l12_w = 'd0; ref_l16_w = 'd0; ref_l20_w = 'd0; ref_l24_w = 'd0; ref_l28_w = 'd0;ref_l01_w = 'd0; ref_l05_w = 'd0; ref_l09_w = 'd0; ref_l13_w = 'd0; ref_l17_w = 'd0; ref_l21_w = 'd0; ref_l25_w = 'd0; ref_l29_w = 'd0;ref_l02_w = 'd0; ref_l06_w = 'd0; ref_l10_w = 'd0; ref_l14_w = 'd0; ref_l18_w = 'd0; ref_l22_w = 'd0; ref_l26_w = 'd0; ref_l30_w = 'd0;ref_l03_w = 'd0; ref_l07_w = 'd0; ref_l11_w = 'd0; ref_l15_w = 'd0; ref_l19_w = 'd0; ref_l23_w = 'd0; ref_l27_w = 'd0; ref_l31_w = 'd0;ref_l32_w = 'd0; ref_l36_w = 'd0; ref_l40_w = 'd0; ref_l44_w = 'd0; ref_l48_w = 'd0; ref_l52_w = 'd0; ref_l56_w = 'd0; ref_l60_w = 'd0;ref_l33_w = 'd0; ref_l37_w = 'd0; ref_l41_w = 'd0; ref_l45_w = 'd0; ref_l49_w = 'd0; ref_l53_w = 'd0; ref_l57_w = 'd0; ref_l61_w = 'd0;ref_l34_w = 'd0; ref_l38_w = 'd0; ref_l42_w = 'd0; ref_l46_w = 'd0; ref_l50_w = 'd0; ref_l54_w = 'd0; ref_l58_w = 'd0; ref_l62_w = 'd0;ref_l35_w = 'd0; ref_l39_w = 'd0; ref_l43_w = 'd0; ref_l47_w = 'd0; ref_l51_w = 'd0; ref_l55_w = 'd0; ref_l59_w = 'd0; ref_l63_w = 'd0;ref_t00_w = 'd0; ref_t04_w = 'd0; ref_t08_w = 'd0; ref_t12_w = 'd0; ref_t16_w = 'd0; ref_t20_w = 'd0; ref_t24_w = 'd0; ref_t28_w = 'd0;ref_t01_w = 'd0; ref_t05_w = 'd0; ref_t09_w = 'd0; ref_t13_w = 'd0; ref_t17_w = 'd0; ref_t21_w = 'd0; ref_t25_w = 'd0; ref_t29_w = 'd0;ref_t02_w = 'd0; ref_t06_w = 'd0; ref_t10_w = 'd0; ref_t14_w = 'd0; ref_t18_w = 'd0; ref_t22_w = 'd0; ref_t26_w = 'd0; ref_t30_w = 'd0;ref_t03_w = 'd0; ref_t07_w = 'd0; ref_t11_w = 'd0; ref_t15_w = 'd0; ref_t19_w = 'd0; ref_t23_w = 'd0; ref_t27_w = 'd0; ref_t31_w = 'd0;ref_t32_w = 'd0; ref_t36_w = 'd0; ref_t40_w = 'd0; ref_t44_w = 'd0; ref_t48_w = 'd0; ref_t52_w = 'd0; ref_t56_w = 'd0; ref_t60_w = 'd0;ref_t33_w = 'd0; ref_t37_w = 'd0; ref_t41_w = 'd0; ref_t45_w = 'd0; ref_t49_w = 'd0; ref_t53_w = 'd0; ref_t57_w = 'd0; ref_t61_w = 'd0;ref_t34_w = 'd0; ref_t38_w = 'd0; ref_t42_w = 'd0; ref_t46_w = 'd0; ref_t50_w = 'd0; ref_t54_w = 'd0; ref_t58_w = 'd0; ref_t62_w = 'd0;ref_t35_w = 'd0; ref_t39_w = 'd0; ref_t43_w = 'd0; ref_t47_w = 'd0; ref_t51_w = 'd0; ref_t55_w = 'd0; ref_t59_w = 'd0; ref_t63_w = 'd0;case(size_i)2'b00:beginref_l00_w = ref_l00_i; ref_l04_w = ref_d00_i; ref_t00_w = ref_t00_i; ref_t04_w = ref_r00_i;ref_l01_w = ref_l01_i; ref_l05_w = ref_d01_i; ref_t01_w = ref_t01_i; ref_t05_w = ref_r01_i;ref_l02_w = ref_l02_i; ref_l06_w = ref_d02_i; ref_t02_w = ref_t02_i; ref_t06_w = ref_r02_i;ref_l03_w = ref_l03_i; ref_l07_w = ref_d03_i; ref_t03_w = ref_t03_i; ref_t07_w = ref_r03_i;end2'b01:beginref_l00_w = ref_l00_i; ref_l04_w = ref_l04_i; ref_l08_w = ref_d00_i; ref_l12_w = ref_d04_i;ref_l01_w = ref_l01_i; ref_l05_w = ref_l05_i; ref_l09_w = ref_d01_i; ref_l13_w = ref_d05_i;ref_l02_w = ref_l02_i; ref_l06_w = ref_l06_i; ref_l10_w = ref_d02_i; ref_l14_w = ref_d06_i;ref_l03_w = ref_l03_i; ref_l07_w = ref_l07_i; ref_l11_w = ref_d03_i; ref_l15_w = ref_d07_i;ref_t00_w = ref_t00_i; ref_t04_w = ref_t04_i; ref_t08_w = ref_r00_i; ref_t12_w = ref_r04_i;ref_t01_w = ref_t01_i; ref_t05_w = ref_t05_i; ref_t09_w = ref_r01_i; ref_t13_w = ref_r05_i;ref_t02_w = ref_t02_i; ref_t06_w = ref_t06_i; ref_t10_w = ref_r02_i; ref_t14_w = ref_r06_i;ref_t03_w = ref_t03_i; ref_t07_w = ref_t07_i; ref_t11_w = ref_r03_i; ref_t15_w = ref_r07_i;end2'b10:beginref_l00_w = ref_l00_i; ref_l04_w = ref_l04_i; ref_l08_w = ref_l08_i; ref_l12_w = ref_l12_i;ref_l01_w = ref_l01_i; ref_l05_w = ref_l05_i; ref_l09_w = ref_l09_i; ref_l13_w = ref_l13_i;ref_l02_w = ref_l02_i; ref_l06_w = ref_l06_i; ref_l10_w = ref_l10_i; ref_l14_w = ref_l14_i;ref_l03_w = ref_l03_i; ref_l07_w = ref_l07_i; ref_l11_w = ref_l11_i; ref_l15_w = ref_l15_i;ref_l16_w = ref_d00_i; ref_l20_w = ref_d04_i; ref_l24_w = ref_d08_i; ref_l28_w = ref_d12_i;ref_l17_w = ref_d01_i; ref_l21_w = ref_d05_i; ref_l25_w = ref_d09_i; ref_l29_w = ref_d13_i;ref_l18_w = ref_d02_i; ref_l22_w = ref_d06_i; ref_l26_w = ref_d10_i; ref_l30_w = ref_d14_i;ref_l19_w = ref_d03_i; ref_l23_w = ref_d07_i; ref_l27_w = ref_d11_i; ref_l31_w = ref_d15_i;ref_t00_w = ref_t00_i; ref_t04_w = ref_t04_i; ref_t08_w = ref_t08_i; ref_t12_w = ref_t12_i;ref_t01_w = ref_t01_i; ref_t05_w = ref_t05_i; ref_t09_w = ref_t09_i; ref_t13_w = ref_t13_i;ref_t02_w = ref_t02_i; ref_t06_w = ref_t06_i; ref_t10_w = ref_t10_i; ref_t14_w = ref_t14_i;ref_t03_w = ref_t03_i; ref_t07_w = ref_t07_i; ref_t11_w = ref_t11_i; ref_t15_w = ref_t15_i;ref_t16_w = ref_r00_i; ref_t20_w = ref_r04_i; ref_t24_w = ref_r08_i; ref_t28_w = ref_r12_i;ref_t17_w = ref_r01_i; ref_t21_w = ref_r05_i; ref_t25_w = ref_r09_i; ref_t29_w = ref_r13_i;ref_t18_w = ref_r02_i; ref_t22_w = ref_r06_i; ref_t26_w = ref_r10_i; ref_t30_w = ref_r14_i;ref_t19_w = ref_r03_i; ref_t23_w = ref_r07_i; ref_t27_w = ref_r11_i; ref_t31_w = ref_r15_i;end2'b11:beginref_l00_w = ref_l00_i; ref_l04_w = ref_l04_i; ref_l08_w = ref_l08_i; ref_l12_w = ref_l12_i;ref_l01_w = ref_l01_i; ref_l05_w = ref_l05_i; ref_l09_w = ref_l09_i; ref_l13_w = ref_l13_i;ref_l02_w = ref_l02_i; ref_l06_w = ref_l06_i; ref_l10_w = ref_l10_i; ref_l14_w = ref_l14_i;ref_l03_w = ref_l03_i; ref_l07_w = ref_l07_i; ref_l11_w = ref_l11_i; ref_l15_w = ref_l15_i;ref_l16_w = ref_l16_i; ref_l20_w = ref_l20_i; ref_l24_w = ref_l24_i; ref_l28_w = ref_l28_i;ref_l17_w = ref_l17_i; ref_l21_w = ref_l21_i; ref_l25_w = ref_l25_i; ref_l29_w = ref_l29_i;ref_l18_w = ref_l18_i; ref_l22_w = ref_l22_i; ref_l26_w = ref_l26_i; ref_l30_w = ref_l30_i;ref_l19_w = ref_l19_i; ref_l23_w = ref_l23_i; ref_l27_w = ref_l27_i; ref_l31_w = ref_l31_i;ref_l32_w = ref_d00_i; ref_l36_w = ref_d04_i; ref_l40_w = ref_d08_i; ref_l44_w = ref_d12_i;ref_l33_w = ref_d01_i; ref_l37_w = ref_d05_i; ref_l41_w = ref_d09_i; ref_l45_w = ref_d13_i;ref_l34_w = ref_d02_i; ref_l38_w = ref_d06_i; ref_l42_w = ref_d10_i; ref_l46_w = ref_d14_i;ref_l35_w = ref_d03_i; ref_l39_w = ref_d07_i; ref_l43_w = ref_d11_i; ref_l47_w = ref_d15_i;ref_l48_w = ref_d16_i; ref_l52_w = ref_d20_i; ref_l56_w = ref_d24_i; ref_l60_w = ref_d28_i;ref_l49_w = ref_d17_i; ref_l53_w = ref_d21_i; ref_l57_w = ref_d25_i; ref_l61_w = ref_d29_i;ref_l50_w = ref_d18_i; ref_l54_w = ref_d22_i; ref_l58_w = ref_d26_i; ref_l62_w = ref_d30_i;ref_l51_w = ref_d19_i; ref_l55_w = ref_d23_i; ref_l59_w = ref_d27_i; ref_l63_w = ref_d31_i;ref_t00_w = ref_t00_i; ref_t04_w = ref_t04_i; ref_t08_w = ref_t08_i; ref_t12_w = ref_t12_i;ref_t01_w = ref_t01_i; ref_t05_w = ref_t05_i; ref_t09_w = ref_t09_i; ref_t13_w = ref_t13_i;ref_t02_w = ref_t02_i; ref_t06_w = ref_t06_i; ref_t10_w = ref_t10_i; ref_t14_w = ref_t14_i;ref_t03_w = ref_t03_i; ref_t07_w = ref_t07_i; ref_t11_w = ref_t11_i; ref_t15_w = ref_t15_i;ref_t16_w = ref_t16_i; ref_t20_w = ref_t20_i; ref_t24_w = ref_t24_i; ref_t28_w = ref_t28_i;ref_t17_w = ref_t17_i; ref_t21_w = ref_t21_i; ref_t25_w = ref_t25_i; ref_t29_w = ref_t29_i;ref_t18_w = ref_t18_i; ref_t22_w = ref_t22_i; ref_t26_w = ref_t26_i; ref_t30_w = ref_t30_i;ref_t19_w = ref_t19_i; ref_t23_w = ref_t23_i; ref_t27_w = ref_t27_i; ref_t31_w = ref_t31_i;ref_t32_w = ref_r00_i; ref_t36_w = ref_r04_i; ref_t40_w = ref_r08_i; ref_t44_w = ref_r12_i;ref_t33_w = ref_r01_i; ref_t37_w = ref_r05_i; ref_t41_w = ref_r09_i; ref_t45_w = ref_r13_i;ref_t34_w = ref_r02_i; ref_t38_w = ref_r06_i; ref_t42_w = ref_r10_i; ref_t46_w = ref_r14_i;ref_t35_w = ref_r03_i; ref_t39_w = ref_r07_i; ref_t43_w = ref_r11_i; ref_t47_w = ref_r15_i;ref_t48_w = ref_r16_i; ref_t52_w = ref_r20_i; ref_t56_w = ref_r24_i; ref_t60_w = ref_r28_i;ref_t49_w = ref_r17_i; ref_t53_w = ref_r21_i; ref_t57_w = ref_r25_i; ref_t61_w = ref_r29_i;ref_t50_w = ref_r18_i; ref_t54_w = ref_r22_i; ref_t58_w = ref_r26_i; ref_t62_w = ref_r30_i;ref_t51_w = ref_r19_i; ref_t55_w = ref_r23_i; ref_t59_w = ref_r27_i; ref_t63_w = ref_r31_i;endendcase
end
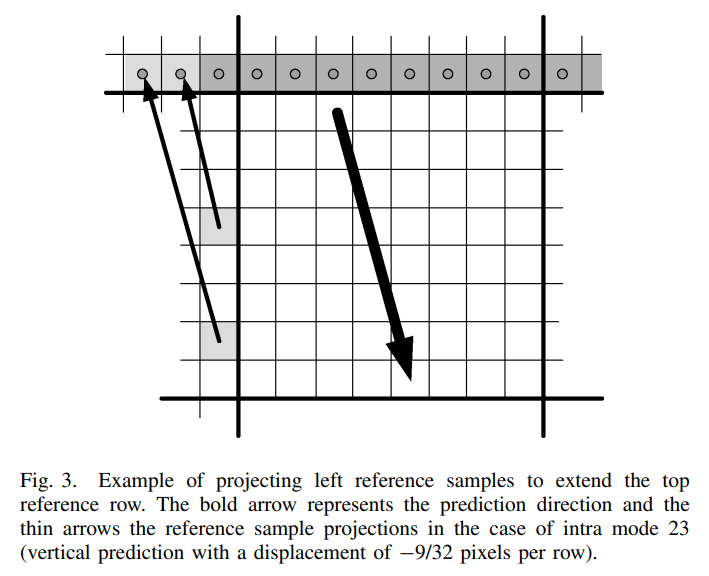
以下代码是参考像素的投射过程。HEVC帧内预测的参考像素最终都是合并到一行像素中,不会再氛围上边行和左边列,左上角三种。合并过程根据预测角度分为两种:mode >= 18时,主体采用上边行像素预测,把左边列像素按照角度投射到上边行数组中(如下图所示);mode < 18时,主体采用左边列像素预测,把上边像素按角度投射到左边列中。
always @(posedge clk or negedge rst_n) beginif(!rst_n) begin // 重置参考像素值,都设为0,清楚前面存储的数据ref_00_r <= 'd0;ref_01_r <= 'd0; ref_05_r <= 'd0; ref_09_r <= 'd0; ref_13_r <= 'd0; ref_17_r <= 'd0; ref_21_r <= 'd0; ref_25_r <= 'd0; ref_29_r <= 'd0;ref_02_r <= 'd0; ref_06_r <= 'd0; ref_10_r <= 'd0; ref_14_r <= 'd0; ref_18_r <= 'd0; ref_22_r <= 'd0; ref_26_r <= 'd0; ref_30_r <= 'd0;ref_03_r <= 'd0; ref_07_r <= 'd0; ref_11_r <= 'd0; ref_15_r <= 'd0; ref_19_r <= 'd0; ref_23_r <= 'd0; ref_27_r <= 'd0; ref_31_r <= 'd0;ref_04_r <= 'd0; ref_08_r <= 'd0; ref_12_r <= 'd0; ref_16_r <= 'd0; ref_20_r <= 'd0; ref_24_r <= 'd0; ref_28_r <= 'd0; ref_32_r <= 'd0;ref_33_r <= 'd0; ref_37_r <= 'd0; ref_41_r <= 'd0; ref_45_r <= 'd0; ref_49_r <= 'd0; ref_53_r <= 'd0; ref_57_r <= 'd0; ref_61_r <= 'd0;ref_34_r <= 'd0; ref_38_r <= 'd0; ref_42_r <= 'd0; ref_46_r <= 'd0; ref_50_r <= 'd0; ref_54_r <= 'd0; ref_58_r <= 'd0; ref_62_r <= 'd0;ref_35_r <= 'd0; ref_39_r <= 'd0; ref_43_r <= 'd0; ref_47_r <= 'd0; ref_51_r <= 'd0; ref_55_r <= 'd0; ref_59_r <= 'd0; ref_63_r <= 'd0;ref_36_r <= 'd0; ref_40_r <= 'd0; ref_44_r <= 'd0; ref_48_r <= 'd0; ref_52_r <= 'd0; ref_56_r <= 'd0; ref_60_r <= 'd0; ref_64_r <= 'd0;ref_x01_r <= 'd0; ref_x05_r <= 'd0; ref_x09_r <= 'd0; ref_x13_r <= 'd0; ref_x17_r <= 'd0; ref_x21_r <= 'd0; ref_x25_r <= 'd0; ref_x29_r <= 'd0;ref_x02_r <= 'd0; ref_x06_r <= 'd0; ref_x10_r <= 'd0; ref_x14_r <= 'd0; ref_x18_r <= 'd0; ref_x22_r <= 'd0; ref_x26_r <= 'd0; ref_x30_r <= 'd0;ref_x03_r <= 'd0; ref_x07_r <= 'd0; ref_x11_r <= 'd0; ref_x15_r <= 'd0; ref_x19_r <= 'd0; ref_x23_r <= 'd0; ref_x27_r <= 'd0; ref_x31_r <= 'd0;ref_x04_r <= 'd0; ref_x08_r <= 'd0; ref_x12_r <= 'd0; ref_x16_r <= 'd0; ref_x20_r <= 'd0; ref_x24_r <= 'd0; ref_x28_r <= 'd0; ref_x32_r <= 'd0;endelse beginref_00_r <= ref_tl_i; // 将左上角像素值存储到ref_00_r寄存器中if(mode_i >= 18) begin // mode >= 18时,主体采用上边行像素预测,把左边列像素按照角度投射到上边行数组中// 将上边行64个像素值存储到ref_01_r ...... ref_64_r 寄存器中。intra预测最大为32x32,采用非阻塞赋值,一次性将最大可能用到的参考像素进行赋值,囊括所有大小的CUref_01_r <= ref_t00_w; ref_05_r <= ref_t04_w; ref_09_r <= ref_t08_w; ref_13_r <= ref_t12_w;ref_02_r <= ref_t01_w; ref_06_r <= ref_t05_w; ref_10_r <= ref_t09_w; ref_14_r <= ref_t13_w;ref_03_r <= ref_t02_w; ref_07_r <= ref_t06_w; ref_11_r <= ref_t10_w; ref_15_r <= ref_t14_w;ref_04_r <= ref_t03_w; ref_08_r <= ref_t07_w; ref_12_r <= ref_t11_w; ref_16_r <= ref_t15_w;ref_17_r <= ref_t16_w; ref_21_r <= ref_t20_w; ref_25_r <= ref_t24_w; ref_29_r <= ref_t28_w;ref_18_r <= ref_t17_w; ref_22_r <= ref_t21_w; ref_26_r <= ref_t25_w; ref_30_r <= ref_t29_w;ref_19_r <= ref_t18_w; ref_23_r <= ref_t22_w; ref_27_r <= ref_t26_w; ref_31_r <= ref_t30_w;ref_20_r <= ref_t19_w; ref_24_r <= ref_t23_w; ref_28_r <= ref_t27_w; ref_32_r <= ref_t31_w;ref_33_r <= ref_t32_w; ref_37_r <= ref_t36_w; ref_41_r <= ref_t40_w; ref_45_r <= ref_t44_w;ref_34_r <= ref_t33_w; ref_38_r <= ref_t37_w; ref_42_r <= ref_t41_w; ref_46_r <= ref_t45_w;ref_35_r <= ref_t34_w; ref_39_r <= ref_t38_w; ref_43_r <= ref_t42_w; ref_47_r <= ref_t46_w;ref_36_r <= ref_t35_w; ref_40_r <= ref_t39_w; ref_44_r <= ref_t43_w; ref_48_r <= ref_t47_w;ref_49_r <= ref_t48_w; ref_53_r <= ref_t52_w; ref_57_r <= ref_t56_w; ref_61_r <= ref_t60_w;ref_50_r <= ref_t49_w; ref_54_r <= ref_t53_w; ref_58_r <= ref_t57_w; ref_62_r <= ref_t61_w;ref_51_r <= ref_t50_w; ref_55_r <= ref_t54_w; ref_59_r <= ref_t58_w; ref_63_r <= ref_t62_w;ref_52_r <= ref_t51_w; ref_56_r <= ref_t55_w; ref_60_r <= ref_t59_w; ref_64_r <= ref_t63_w;case (mode_i)'d19:begin // mode 19是刚好大于45度角的预测ref_x01_r <= ref_l00_w; ref_x05_r <= ref_l05_w; ref_x09_r <= ref_l10_w; ref_x13_r <= ref_l15_w;ref_x02_r <= ref_l01_w; ref_x06_r <= ref_l06_w; ref_x10_r <= ref_l11_w; ref_x14_r <= ref_l16_w;ref_x03_r <= ref_l03_w; ref_x07_r <= ref_l08_w; ref_x11_r <= ref_l13_w; ref_x15_r <= ref_l17_w;ref_x04_r <= ref_l04_w; ref_x08_r <= ref_l09_w; ref_x12_r <= ref_l14_w; ref_x16_r <= ref_l19_w;ref_x17_r <= ref_l20_w; ref_x21_r <= ref_l25_w; ref_x25_r <= ref_l30_w;ref_x18_r <= ref_l21_w; ref_x22_r <= ref_l26_w; ref_x26_r <= ref_l31_w;ref_x19_r <= ref_l22_w; ref_x23_r <= ref_l27_w;ref_x20_r <= ref_l24_w; ref_x24_r <= ref_l29_w;end'd20:beginref_x01_r <= ref_l01_w; ref_x05_r <= ref_l07_w; ref_x09_r <= ref_l13_w; ref_x13_r <= ref_l19_w;ref_x02_r <= ref_l02_w; ref_x06_r <= ref_l08_w; ref_x10_r <= ref_l14_w; ref_x14_r <= ref_l20_w;ref_x03_r <= ref_l04_w; ref_x07_r <= ref_l10_w; ref_x11_r <= ref_l16_w; ref_x15_r <= ref_l22_w;ref_x04_r <= ref_l05_w; ref_x08_r <= ref_l11_w; ref_x12_r <= ref_l17_w; ref_x16_r <= ref_l23_w;ref_x17_r <= ref_l25_w; ref_x21_r <= ref_l31_w;ref_x18_r <= ref_l26_w;ref_x19_r <= ref_l28_w;ref_x20_r <= ref_l29_w;end'd21:beginref_x01_r <= ref_l01_w; ref_x05_r <= ref_l08_w; ref_x09_r <= ref_l16_w; ref_x13_r <= ref_l23_w;ref_x02_r <= ref_l03_w; ref_x06_r <= ref_l10_w; ref_x10_r <= ref_l18_w; ref_x14_r <= ref_l25_w;ref_x03_r <= ref_l05_w; ref_x07_r <= ref_l12_w; ref_x11_r <= ref_l20_w; ref_x15_r <= ref_l27_w;ref_x04_r <= ref_l07_w; ref_x08_r <= ref_l14_w; ref_x12_r <= ref_l22_w; ref_x16_r <= ref_l29_w;ref_x17_r <= ref_l31_w;end'd22:beginref_x01_r <= ref_l01_w; ref_x05_r <= ref_l11_w; ref_x09_r <= ref_l21_w; ref_x13_r <= ref_l31_w;ref_x02_r <= ref_l04_w; ref_x06_r <= ref_l14_w; ref_x10_r <= ref_l24_w;ref_x03_r <= ref_l06_w; ref_x07_r <= ref_l16_w; ref_x11_r <= ref_l26_w;ref_x04_r <= ref_l09_w; ref_x08_r <= ref_l19_w; ref_x12_r <= ref_l29_w;end'd23:beginref_x01_r <= ref_l03_w; ref_x05_r <= ref_l17_w; ref_x09_r <= ref_l31_w;ref_x02_r <= ref_l06_w; ref_x06_r <= ref_l20_w;ref_x03_r <= ref_l10_w; ref_x07_r <= ref_l24_w;ref_x04_r <= ref_l13_w; ref_x08_r <= ref_l27_w;end'd24:beginref_x01_r <= ref_l05_w; ref_x05_r <= ref_l31_w;ref_x02_r <= ref_l12_w;ref_x03_r <= ref_l18_w;ref_x04_r <= ref_l25_w;end'd25:beginref_x01_r <= ref_l15_w;ref_x02_r <= ref_l31_w;enddefault begin // mode 18和 26-32,都是直接将左边列参考像素拷贝到ref_xN_r中ref_x01_r <= ref_l00_w; ref_x05_r <= ref_l04_w; ref_x09_r <= ref_l08_w; ref_x13_r <= ref_l12_w;ref_x02_r <= ref_l01_w; ref_x06_r <= ref_l05_w; ref_x10_r <= ref_l09_w; ref_x14_r <= ref_l13_w;ref_x03_r <= ref_l02_w; ref_x07_r <= ref_l06_w; ref_x11_r <= ref_l10_w; ref_x15_r <= ref_l14_w;ref_x04_r <= ref_l03_w; ref_x08_r <= ref_l07_w; ref_x12_r <= ref_l11_w; ref_x16_r <= ref_l15_w;ref_x17_r <= ref_l16_w; ref_x21_r <= ref_l20_w; ref_x25_r <= ref_l24_w; ref_x29_r <= ref_l28_w;ref_x18_r <= ref_l17_w; ref_x22_r <= ref_l21_w; ref_x26_r <= ref_l25_w; ref_x30_r <= ref_l29_w;ref_x19_r <= ref_l18_w; ref_x23_r <= ref_l22_w; ref_x27_r <= ref_l26_w; ref_x31_r <= ref_l30_w;ref_x20_r <= ref_l19_w; ref_x24_r <= ref_l23_w; ref_x28_r <= ref_l27_w; ref_x32_r <= ref_l31_w;endendcaseendelse begin // mode < 18时,主体采用左边列像素预测,把上边像素按角度投射到左边列中ref_01_r <= ref_l00_w; ref_05_r <= ref_l04_w; ref_09_r <= ref_l08_w; ref_13_r <= ref_l12_w;ref_02_r <= ref_l01_w; ref_06_r <= ref_l05_w; ref_10_r <= ref_l09_w; ref_14_r <= ref_l13_w;ref_03_r <= ref_l02_w; ref_07_r <= ref_l06_w; ref_11_r <= ref_l10_w; ref_15_r <= ref_l14_w;ref_04_r <= ref_l03_w; ref_08_r <= ref_l07_w; ref_12_r <= ref_l11_w; ref_16_r <= ref_l15_w;ref_17_r <= ref_l16_w; ref_21_r <= ref_l20_w; ref_25_r <= ref_l24_w; ref_29_r <= ref_l28_w;ref_18_r <= ref_l17_w; ref_22_r <= ref_l21_w; ref_26_r <= ref_l25_w; ref_30_r <= ref_l29_w;ref_19_r <= ref_l18_w; ref_23_r <= ref_l22_w; ref_27_r <= ref_l26_w; ref_31_r <= ref_l30_w;ref_20_r <= ref_l19_w; ref_24_r <= ref_l23_w; ref_28_r <= ref_l27_w; ref_32_r <= ref_l31_w;ref_33_r <= ref_l32_w; ref_37_r <= ref_l36_w; ref_41_r <= ref_l40_w; ref_45_r <= ref_l44_w;ref_34_r <= ref_l33_w; ref_38_r <= ref_l37_w; ref_42_r <= ref_l41_w; ref_46_r <= ref_l45_w;ref_35_r <= ref_l34_w; ref_39_r <= ref_l38_w; ref_43_r <= ref_l42_w; ref_47_r <= ref_l46_w;ref_36_r <= ref_l35_w; ref_40_r <= ref_l39_w; ref_44_r <= ref_l43_w; ref_48_r <= ref_l47_w;ref_49_r <= ref_l48_w; ref_53_r <= ref_l52_w; ref_57_r <= ref_l56_w; ref_61_r <= ref_l60_w;ref_50_r <= ref_l49_w; ref_54_r <= ref_l53_w; ref_58_r <= ref_l57_w; ref_62_r <= ref_l61_w;ref_51_r <= ref_l50_w; ref_55_r <= ref_l54_w; ref_59_r <= ref_l58_w; ref_63_r <= ref_l62_w;ref_52_r <= ref_l51_w; ref_56_r <= ref_l55_w; ref_60_r <= ref_l59_w; ref_64_r <= ref_l63_w;case (mode_i)'d17:beginref_x01_r <= ref_t00_w; ref_x05_r <= ref_t05_w; ref_x09_r <= ref_t10_w; ref_x13_r <= ref_t15_w;ref_x02_r <= ref_t01_w; ref_x06_r <= ref_t06_w; ref_x10_r <= ref_t11_w; ref_x14_r <= ref_t16_w;ref_x03_r <= ref_t03_w; ref_x07_r <= ref_t08_w; ref_x11_r <= ref_t13_w; ref_x15_r <= ref_t17_w;ref_x04_r <= ref_t04_w; ref_x08_r <= ref_t09_w; ref_x12_r <= ref_t14_w; ref_x16_r <= ref_t19_w;ref_x17_r <= ref_t20_w; ref_x21_r <= ref_t25_w; ref_x25_r <= ref_t30_w;ref_x18_r <= ref_t21_w; ref_x22_r <= ref_t26_w; ref_x26_r <= ref_t31_w;ref_x19_r <= ref_t22_w; ref_x23_r <= ref_t27_w;ref_x20_r <= ref_t24_w; ref_x24_r <= ref_t29_w;end'd16:beginref_x01_r <= ref_t01_w; ref_x05_r <= ref_t07_w; ref_x09_r <= ref_t13_w; ref_x13_r <= ref_t19_w;ref_x02_r <= ref_t02_w; ref_x06_r <= ref_t08_w; ref_x10_r <= ref_t14_w; ref_x14_r <= ref_t20_w;ref_x03_r <= ref_t04_w; ref_x07_r <= ref_t10_w; ref_x11_r <= ref_t16_w; ref_x15_r <= ref_t22_w;ref_x04_r <= ref_t05_w; ref_x08_r <= ref_t11_w; ref_x12_r <= ref_t17_w; ref_x16_r <= ref_t23_w;ref_x17_r <= ref_t25_w; ref_x21_r <= ref_t31_w;ref_x18_r <= ref_t26_w;ref_x19_r <= ref_t28_w;ref_x20_r <= ref_t29_w;end'd15:beginref_x01_r <= ref_t01_w; ref_x05_r <= ref_t08_w; ref_x09_r <= ref_t16_w; ref_x13_r <= ref_t23_w;ref_x02_r <= ref_t03_w; ref_x06_r <= ref_t10_w; ref_x10_r <= ref_t18_w; ref_x14_r <= ref_t25_w;ref_x03_r <= ref_t05_w; ref_x07_r <= ref_t12_w; ref_x11_r <= ref_t20_w; ref_x15_r <= ref_t27_w;ref_x04_r <= ref_t07_w; ref_x08_r <= ref_t14_w; ref_x12_r <= ref_t22_w; ref_x16_r <= ref_t29_w;ref_x17_r <= ref_t31_w;end'd14:beginref_x01_r <= ref_t01_w; ref_x05_r <= ref_t11_w; ref_x09_r <= ref_t21_w; ref_x13_r <= ref_t31_w;ref_x02_r <= ref_t04_w; ref_x06_r <= ref_t14_w; ref_x10_r <= ref_t24_w;ref_x03_r <= ref_t06_w; ref_x07_r <= ref_t16_w; ref_x11_r <= ref_t26_w;ref_x04_r <= ref_t09_w; ref_x08_r <= ref_t19_w; ref_x12_r <= ref_t29_w;end'd13:beginref_x01_r <= ref_t03_w; ref_x05_r <= ref_t17_w; ref_x09_r <= ref_t31_w;ref_x02_r <= ref_t06_w; ref_x06_r <= ref_t20_w;ref_x03_r <= ref_t10_w; ref_x07_r <= ref_t24_w;ref_x04_r <= ref_t13_w; ref_x08_r <= ref_t27_w;end'd12:beginref_x01_r <= ref_t05_w; ref_x05_r <= ref_t31_w;ref_x02_r <= ref_t12_w;ref_x03_r <= ref_t18_w;ref_x04_r <= ref_t25_w;end'd11:beginref_x01_r <= ref_t15_w;ref_x02_r <= ref_t31_w;enddefault beginref_x01_r <= ref_t00_w; ref_x05_r <= ref_t04_w; ref_x09_r <= ref_t08_w; ref_x13_r <= ref_t12_w;ref_x02_r <= ref_t01_w; ref_x06_r <= ref_t05_w; ref_x10_r <= ref_t09_w; ref_x14_r <= ref_t13_w;ref_x03_r <= ref_t02_w; ref_x07_r <= ref_t06_w; ref_x11_r <= ref_t10_w; ref_x15_r <= ref_t14_w;ref_x04_r <= ref_t03_w; ref_x08_r <= ref_t07_w; ref_x12_r <= ref_t11_w; ref_x16_r <= ref_t15_w;ref_x17_r <= ref_t16_w; ref_x21_r <= ref_t20_w; ref_x25_r <= ref_t24_w; ref_x29_r <= ref_t28_w;ref_x18_r <= ref_t17_w; ref_x22_r <= ref_t21_w; ref_x26_r <= ref_t25_w; ref_x30_r <= ref_t29_w;ref_x19_r <= ref_t18_w; ref_x23_r <= ref_t22_w; ref_x27_r <= ref_t26_w; ref_x31_r <= ref_t30_w;ref_x20_r <= ref_t19_w; ref_x24_r <= ref_t23_w; ref_x28_r <= ref_t27_w; ref_x32_r <= ref_t31_w;endendcaseendendend以下代码计算DC预测模式的中间值:
//**********************************************************************************
//calculate the middle value for DC
always @(posedge clk or negedge rst_n) beginif(!rst_n) beginmid_t0_r <= 'd0; mid_l0_r <= 'd0;mid_t2_r <= 'd0; mid_l2_r <= 'd0;mid_t3_r <= 'd0; mid_l3_r <= 'd0;mid_t4_r <= 'd0; mid_l4_r <= 'd0;mid_t5_r <= 'd0; mid_l5_r <= 'd0;endelse beginmid_t0_r <= ref_t00_i+ref_t01_i+ref_t02_i+ref_t03_i; // 计算顶部4个像素(0-3)的和// t2 - t5 分别计算8个像素的和(0-7, 8-15, 16-23, 24-31)mid_t2_r <= ref_t00_i+ref_t01_i+ref_t02_i+ref_t03_i+ref_t04_i+ref_t05_i+ref_t06_i+ref_t07_i;mid_t3_r <= ref_t08_i+ref_t09_i+ref_t10_i+ref_t11_i+ref_t12_i+ref_t13_i+ref_t14_i+ref_t15_i;mid_t4_r <= ref_t16_i+ref_t17_i+ref_t18_i+ref_t19_i+ref_t20_i+ref_t21_i+ref_t22_i+ref_t23_i;mid_t5_r <= ref_t24_i+ref_t25_i+ref_t26_i+ref_t27_i+ref_t28_i+ref_t29_i+ref_t30_i+ref_t31_i;mid_l0_r <= ref_l00_i+ref_l01_i+ref_l02_i+ref_l03_i;mid_l2_r <= ref_l00_i+ref_l01_i+ref_l02_i+ref_l03_i+ref_l04_i+ref_l05_i+ref_l06_i+ref_l07_i;mid_l3_r <= ref_l08_i+ref_l09_i+ref_l10_i+ref_l11_i+ref_l12_i+ref_l13_i+ref_l14_i+ref_l15_i;mid_l4_r <= ref_l16_i+ref_l17_i+ref_l18_i+ref_l19_i+ref_l20_i+ref_l21_i+ref_l22_i+ref_l23_i;mid_l5_r <= ref_l24_i+ref_l25_i+ref_l26_i+ref_l27_i+ref_l28_i+ref_l29_i+ref_l30_i+ref_l31_i;end
end......
//**********************************************************************************
//calculate DC value for DC mode
always @(posedge clk or negedge rst_n) beginif(!rst_n)dc_value_r <= 'd0;else begincase(size_r0)2'b00:dc_value_r<=(mid_t0_r+mid_l0_r+4)>>3;2'b01:dc_value_r<=(mid_t2_r+mid_l2_r+8)>>4;2'b10:dc_value_r<=(mid_t2_r+mid_t3_r+mid_l2_r+mid_l3_r+16)>>5;2'b11:dc_value_r<=(mid_t2_r+mid_t3_r+mid_t4_r+mid_t5_r+mid_l2_r+mid_l3_r+mid_l4_r+mid_l5_r+32)>>6;endcaseend
end以下代码计算角度预测模式下,4x4块的预测值,基于ifact来加权两个整像素预测值。
//stage2
//***********************************************************************************
//predict process//Angular
always @( * ) beginif(ifact0) beginpre_0_0_w = ( (32-ifact0)*ref_0_0 + ifact0*ref_0_1 + 16 ) >>5;pre_0_1_w = ( (32-ifact0)*ref_0_1 + ifact0*ref_0_2 + 16 ) >>5;pre_0_2_w = ( (32-ifact0)*ref_0_2 + ifact0*ref_0_3 + 16 ) >>5;pre_0_3_w = ( (32-ifact0)*ref_0_3 + ifact0*ref_0_4 + 16 ) >>5;endelse beginpre_0_0_w = ref_0_0 ;pre_0_1_w = ref_0_1 ;pre_0_2_w = ref_0_2 ;pre_0_3_w = ref_0_3 ;end
endalways @( * ) beginif(ifact0) beginpre_1_0_w = ( (32-ifact1)*ref_1_0 + ifact1*ref_1_1 + 16 ) >>5;pre_1_1_w = ( (32-ifact1)*ref_1_1 + ifact1*ref_1_2 + 16 ) >>5;pre_1_2_w = ( (32-ifact1)*ref_1_2 + ifact1*ref_1_3 + 16 ) >>5;pre_1_3_w = ( (32-ifact1)*ref_1_3 + ifact1*ref_1_4 + 16 ) >>5;endelse beginpre_1_0_w = ref_1_0 ;pre_1_1_w = ref_1_1 ;pre_1_2_w = ref_1_2 ;pre_1_3_w = ref_1_3 ;end
endalways @( * ) beginif(ifact0) beginpre_2_0_w = ( (32-ifact2)*ref_2_0 + ifact2*ref_2_1 + 16 ) >>5;pre_2_1_w = ( (32-ifact2)*ref_2_1 + ifact2*ref_2_2 + 16 ) >>5;pre_2_2_w = ( (32-ifact2)*ref_2_2 + ifact2*ref_2_3 + 16 ) >>5;pre_2_3_w = ( (32-ifact2)*ref_2_3 + ifact2*ref_2_4 + 16 ) >>5;endelse beginpre_2_0_w = ref_2_0 ;pre_2_1_w = ref_2_1 ;pre_2_2_w = ref_2_2 ;pre_2_3_w = ref_2_3 ;end
endalways @( * ) beginif(ifact0) beginpre_3_0_w = ( (32-ifact3)*ref_3_0 + ifact3*ref_3_1 + 16 ) >>5;pre_3_1_w = ( (32-ifact3)*ref_3_1 + ifact3*ref_3_2 + 16 ) >>5;pre_3_2_w = ( (32-ifact3)*ref_3_2 + ifact3*ref_3_3 + 16 ) >>5;pre_3_3_w = ( (32-ifact3)*ref_3_3 + ifact3*ref_3_4 + 16 ) >>5;endelse beginpre_3_0_w = ref_3_0 ;pre_3_1_w = ref_3_1 ;pre_3_2_w = ref_3_2 ;pre_3_3_w = ref_3_3 ;end
end以下代码为Planar模式4x4块预测像素计算过程,基于Planar计算公式,容易理解。
//Planar
reg [`PIXEL_WIDTH-1:0] planar_00_w,planar_01_w,planar_02_w,planar_03_w;
reg [`PIXEL_WIDTH-1:0] planar_10_w,planar_11_w,planar_12_w,planar_13_w;
reg [`PIXEL_WIDTH-1:0] planar_20_w,planar_21_w,planar_22_w,planar_23_w;
reg [`PIXEL_WIDTH-1:0] planar_30_w,planar_31_w,planar_32_w,planar_33_w;always @( * ) begincase(size_r1)2'b00:beginplanar_00_w=(3*left0_r+3*top0_r+planar_x0_r+planar_y0_r+4)>>3;planar_01_w=(2*left0_r+3*top1_r+planar_x1_r+planar_y0_r+4)>>3;planar_02_w=(1*left0_r+3*top2_r+planar_x2_r+planar_y0_r+4)>>3;planar_03_w=(0*left0_r+3*top3_r+planar_x3_r+planar_y0_r+4)>>3;planar_10_w=(3*left1_r+2*top0_r+planar_x0_r+planar_y1_r+4)>>3;planar_11_w=(2*left1_r+2*top1_r+planar_x1_r+planar_y1_r+4)>>3;planar_12_w=(1*left1_r+2*top2_r+planar_x2_r+planar_y1_r+4)>>3;planar_13_w=(0*left1_r+2*top3_r+planar_x3_r+planar_y1_r+4)>>3;planar_20_w=(3*left2_r+1*top0_r+planar_x0_r+planar_y2_r+4)>>3;planar_21_w=(2*left2_r+1*top1_r+planar_x1_r+planar_y2_r+4)>>3;planar_22_w=(1*left2_r+1*top2_r+planar_x2_r+planar_y2_r+4)>>3;planar_23_w=(0*left2_r+1*top3_r+planar_x3_r+planar_y2_r+4)>>3;planar_30_w=(3*left3_r+0*top0_r+planar_x0_r+planar_y3_r+4)>>3;planar_31_w=(2*left3_r+0*top1_r+planar_x1_r+planar_y3_r+4)>>3;planar_32_w=(1*left3_r+0*top2_r+planar_x2_r+planar_y3_r+4)>>3;planar_33_w=(0*left3_r+0*top3_r+planar_x3_r+planar_y3_r+4)>>3;end2'b01:beginplanar_00_w=((7-x0_r1)*left0_r+(7-y0_r1)*top0_r+planar_x0_r+planar_y0_r+8)>>4;planar_01_w=((7-x1_r1)*left0_r+(7-y0_r1)*top1_r+planar_x1_r+planar_y0_r+8)>>4;planar_02_w=((7-x2_r1)*left0_r+(7-y0_r1)*top2_r+planar_x2_r+planar_y0_r+8)>>4;planar_03_w=((7-x3_r1)*left0_r+(7-y0_r1)*top3_r+planar_x3_r+planar_y0_r+8)>>4;planar_10_w=((7-x0_r1)*left1_r+(7-y1_r1)*top0_r+planar_x0_r+planar_y1_r+8)>>4;planar_11_w=((7-x1_r1)*left1_r+(7-y1_r1)*top1_r+planar_x1_r+planar_y1_r+8)>>4;planar_12_w=((7-x2_r1)*left1_r+(7-y1_r1)*top2_r+planar_x2_r+planar_y1_r+8)>>4;planar_13_w=((7-x3_r1)*left1_r+(7-y1_r1)*top3_r+planar_x3_r+planar_y1_r+8)>>4;planar_20_w=((7-x0_r1)*left2_r+(7-y2_r1)*top0_r+planar_x0_r+planar_y2_r+8)>>4;planar_21_w=((7-x1_r1)*left2_r+(7-y2_r1)*top1_r+planar_x1_r+planar_y2_r+8)>>4;planar_22_w=((7-x2_r1)*left2_r+(7-y2_r1)*top2_r+planar_x2_r+planar_y2_r+8)>>4;planar_23_w=((7-x3_r1)*left2_r+(7-y2_r1)*top3_r+planar_x3_r+planar_y2_r+8)>>4;planar_30_w=((7-x0_r1)*left3_r+(7-y3_r1)*top0_r+planar_x0_r+planar_y3_r+8)>>4;planar_31_w=((7-x1_r1)*left3_r+(7-y3_r1)*top1_r+planar_x1_r+planar_y3_r+8)>>4;planar_32_w=((7-x2_r1)*left3_r+(7-y3_r1)*top2_r+planar_x2_r+planar_y3_r+8)>>4;planar_33_w=((7-x3_r1)*left3_r+(7-y3_r1)*top3_r+planar_x3_r+planar_y3_r+8)>>4;end2'b10:beginplanar_00_w=((15-x0_r1)*left0_r+(15-y0_r1)*top0_r+planar_x0_r+planar_y0_r+16)>>5;planar_01_w=((15-x1_r1)*left0_r+(15-y0_r1)*top1_r+planar_x1_r+planar_y0_r+16)>>5;planar_02_w=((15-x2_r1)*left0_r+(15-y0_r1)*top2_r+planar_x2_r+planar_y0_r+16)>>5;planar_03_w=((15-x3_r1)*left0_r+(15-y0_r1)*top3_r+planar_x3_r+planar_y0_r+16)>>5;planar_10_w=((15-x0_r1)*left1_r+(15-y1_r1)*top0_r+planar_x0_r+planar_y1_r+16)>>5;planar_11_w=((15-x1_r1)*left1_r+(15-y1_r1)*top1_r+planar_x1_r+planar_y1_r+16)>>5;planar_12_w=((15-x2_r1)*left1_r+(15-y1_r1)*top2_r+planar_x2_r+planar_y1_r+16)>>5;planar_13_w=((15-x3_r1)*left1_r+(15-y1_r1)*top3_r+planar_x3_r+planar_y1_r+16)>>5;planar_20_w=((15-x0_r1)*left2_r+(15-y2_r1)*top0_r+planar_x0_r+planar_y2_r+16)>>5;planar_21_w=((15-x1_r1)*left2_r+(15-y2_r1)*top1_r+planar_x1_r+planar_y2_r+16)>>5;planar_22_w=((15-x2_r1)*left2_r+(15-y2_r1)*top2_r+planar_x2_r+planar_y2_r+16)>>5;planar_23_w=((15-x3_r1)*left2_r+(15-y2_r1)*top3_r+planar_x3_r+planar_y2_r+16)>>5;planar_30_w=((15-x0_r1)*left3_r+(15-y3_r1)*top0_r+planar_x0_r+planar_y3_r+16)>>5;planar_31_w=((15-x1_r1)*left3_r+(15-y3_r1)*top1_r+planar_x1_r+planar_y3_r+16)>>5;planar_32_w=((15-x2_r1)*left3_r+(15-y3_r1)*top2_r+planar_x2_r+planar_y3_r+16)>>5;planar_33_w=((15-x3_r1)*left3_r+(15-y3_r1)*top3_r+planar_x3_r+planar_y3_r+16)>>5;end2'b11:beginplanar_00_w=((31-x0_r1)*left0_r+(31-y0_r1)*top0_r+planar_x0_r+planar_y0_r+32)>>6;planar_01_w=((31-x1_r1)*left0_r+(31-y0_r1)*top1_r+planar_x1_r+planar_y0_r+32)>>6;planar_02_w=((31-x2_r1)*left0_r+(31-y0_r1)*top2_r+planar_x2_r+planar_y0_r+32)>>6;planar_03_w=((31-x3_r1)*left0_r+(31-y0_r1)*top3_r+planar_x3_r+planar_y0_r+32)>>6;planar_10_w=((31-x0_r1)*left1_r+(31-y1_r1)*top0_r+planar_x0_r+planar_y1_r+32)>>6;planar_11_w=((31-x1_r1)*left1_r+(31-y1_r1)*top1_r+planar_x1_r+planar_y1_r+32)>>6;planar_12_w=((31-x2_r1)*left1_r+(31-y1_r1)*top2_r+planar_x2_r+planar_y1_r+32)>>6;planar_13_w=((31-x3_r1)*left1_r+(31-y1_r1)*top3_r+planar_x3_r+planar_y1_r+32)>>6;planar_20_w=((31-x0_r1)*left2_r+(31-y2_r1)*top0_r+planar_x0_r+planar_y2_r+32)>>6;planar_21_w=((31-x1_r1)*left2_r+(31-y2_r1)*top1_r+planar_x1_r+planar_y2_r+32)>>6;planar_22_w=((31-x2_r1)*left2_r+(31-y2_r1)*top2_r+planar_x2_r+planar_y2_r+32)>>6;planar_23_w=((31-x3_r1)*left2_r+(31-y2_r1)*top3_r+planar_x3_r+planar_y2_r+32)>>6;planar_30_w=((31-x0_r1)*left3_r+(31-y3_r1)*top0_r+planar_x0_r+planar_y3_r+32)>>6;planar_31_w=((31-x1_r1)*left3_r+(31-y3_r1)*top1_r+planar_x1_r+planar_y3_r+32)>>6;planar_32_w=((31-x2_r1)*left3_r+(31-y3_r1)*top2_r+planar_x2_r+planar_y3_r+32)>>6;planar_33_w=((31-x3_r1)*left3_r+(31-y3_r1)*top3_r+planar_x3_r+planar_y3_r+32)>>6;endendcase
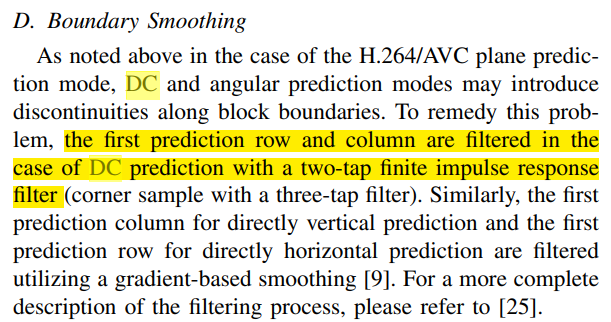
end以下代码为对DC、水平预测和垂直预测三种模式预测像素进行边界滤波代码。对DC,垂直预测和水平预测 三种模式,HEVC定义了边界滤波算法。
//DC
reg [`PIXEL_WIDTH-1:0] DC_00_w,DC_01_w,DC_02_w,DC_03_w;
reg [`PIXEL_WIDTH-1:0] DC_10_w;
reg [`PIXEL_WIDTH-1:0] DC_20_w;
reg [`PIXEL_WIDTH-1:0] DC_30_w;always @( * ) beginif(pre_sel_i==2'b00) beginif((x0_r1==0) && (y0_r1==0) && size_r1!=2'b11)DC_00_w = (top0_r+left0_r+(dc_value_r<<1)+2)>>2;else if((x0_r1==0) && size_r1!=2'b11)DC_00_w = (left0_r+(dc_value_r*3)+2)>>2;else if((y0_r1==0) && size_r1!=2'b11)DC_00_w = (top0_r +(dc_value_r*3)+2)>>2;else beginDC_00_w = dc_value_r;endendelse beginDC_00_w = dc_value_r;end
endalways @( * ) beginif((x0_r1==0) && size_r1!=2'b11 && (pre_sel_i==2'b00) ) beginDC_10_w = (left1_r+(dc_value_r*3)+2)>>2;DC_20_w = (left2_r+(dc_value_r*3)+2)>>2;DC_30_w = (left3_r+(dc_value_r*3)+2)>>2;endelse beginDC_10_w = dc_value_r;DC_20_w = dc_value_r;DC_30_w = dc_value_r;end
endalways @( * ) beginif((y0_r1==0) && size_r1!=2'b11 && (pre_sel_i==2'b00) ) beginDC_01_w = (top1_r+(dc_value_r*3)+2)>>2;DC_02_w = (top2_r+(dc_value_r*3)+2)>>2;DC_03_w = (top3_r+(dc_value_r*3)+2)>>2;endelse beginDC_01_w = dc_value_r;DC_02_w = dc_value_r;DC_03_w = dc_value_r;end
end//Angular26 and Angular10 filter
wire signed [`PIXEL_WIDTH:0] top0_w, top1_w, top2_w, top3_w;
wire signed [`PIXEL_WIDTH:0] left0_w,left1_w,left2_w,left3_w;
wire signed [`PIXEL_WIDTH:0] ref_tl;assign top0_w={1'b0,top0_r}; assign left0_w={1'b0,left0_r};
assign top1_w={1'b0,top1_r}; assign left1_w={1'b0,left1_r};
assign top2_w={1'b0,top2_r}; assign left2_w={1'b0,left2_r};
assign top3_w={1'b0,top3_r}; assign left3_w={1'b0,left3_r};assign ref_tl={1'b0,ref_tl_i};wire signed [`PIXEL_WIDTH+1:0] ver_0_w, ver_1_w, ver_2_w, ver_3_w;
wire signed [`PIXEL_WIDTH+1:0] hor_0_w, hor_1_w, hor_2_w, hor_3_w;reg [`PIXEL_WIDTH-1:0] ver_00_w,ver_10_w,ver_20_w,ver_30_w;
reg [`PIXEL_WIDTH-1:0] hor_00_w,hor_01_w,hor_02_w,hor_03_w;assign ver_0_w=top0_w+((left0_w-ref_tl)>>>1);
assign ver_1_w=top0_w+((left1_w-ref_tl)>>>1);
assign ver_2_w=top0_w+((left2_w-ref_tl)>>>1);
assign ver_3_w=top0_w+((left3_w-ref_tl)>>>1);assign hor_0_w=left0_w+((top0_w-ref_tl)>>>1);
assign hor_1_w=left0_w+((top1_w-ref_tl)>>>1);
assign hor_2_w=left0_w+((top2_w-ref_tl)>>>1);
assign hor_3_w=left0_w+((top3_w-ref_tl)>>>1);//Angular26
always @( * ) beginif((x0_r1==0) && size_r1!=2'b11 && (pre_sel_i==2'b00) ) beginver_00_w=(ver_0_w[9] ? 'd0 : ( ver_0_w[8] ? 'd255 : ver_0_w[7:0] ));ver_10_w=(ver_1_w[9] ? 'd0 : ( ver_1_w[8] ? 'd255 : ver_1_w[7:0] ));ver_20_w=(ver_2_w[9] ? 'd0 : ( ver_2_w[8] ? 'd255 : ver_2_w[7:0] ));ver_30_w=(ver_3_w[9] ? 'd0 : ( ver_3_w[8] ? 'd255 : ver_3_w[7:0] ));endelse beginver_00_w=top0_r;ver_10_w=top0_r;ver_20_w=top0_r;ver_30_w=top0_r;end
end//Angular10
always @( * ) beginif((y0_r1==0) && size_r1!=2'b11 && (pre_sel_i==2'b00) ) beginhor_00_w=(hor_0_w[9] ? 'd0 : ( hor_0_w[8] ? 'd255 : hor_0_w[7:0] ));hor_01_w=(hor_1_w[9] ? 'd0 : ( hor_1_w[8] ? 'd255 : hor_1_w[7:0] ));hor_02_w=(hor_2_w[9] ? 'd0 : ( hor_2_w[8] ? 'd255 : hor_2_w[7:0] ));hor_03_w=(hor_3_w[9] ? 'd0 : ( hor_3_w[8] ? 'd255 : hor_3_w[7:0] ));endelse beginhor_00_w=left0_r;hor_01_w=left0_r;hor_02_w=left0_r;hor_03_w=left0_r;end
end
最后,将预测结果输出到输出变量
//***************************************************************************
//output
always @(posedge clk or negedge rst_n) beginif(!rst_n) beginpred_00_o<='d0; pred_01_o<='d0; pred_02_o<='d0; pred_03_o<='d0;pred_10_o<='d0; pred_11_o<='d0; pred_12_o<='d0; pred_13_o<='d0;pred_20_o<='d0; pred_21_o<='d0; pred_22_o<='d0; pred_23_o<='d0;pred_30_o<='d0; pred_31_o<='d0; pred_32_o<='d0; pred_33_o<='d0;endelse begincase(mode_r1)'d0:beginpred_00_o<=planar_00_w; pred_01_o<=planar_01_w; pred_02_o<=planar_02_w; pred_03_o<=planar_03_w;pred_10_o<=planar_10_w; pred_11_o<=planar_11_w; pred_12_o<=planar_12_w; pred_13_o<=planar_13_w;pred_20_o<=planar_20_w; pred_21_o<=planar_21_w; pred_22_o<=planar_22_w; pred_23_o<=planar_23_w;pred_30_o<=planar_30_w; pred_31_o<=planar_31_w; pred_32_o<=planar_32_w; pred_33_o<=planar_33_w;end'd1:beginpred_00_o<=DC_00_w; pred_01_o<=DC_01_w; pred_02_o<=DC_02_w; pred_03_o<=DC_03_w;pred_10_o<=DC_10_w; pred_11_o<=dc_value_r; pred_12_o<=dc_value_r; pred_13_o<=dc_value_r;pred_20_o<=DC_20_w; pred_21_o<=dc_value_r; pred_22_o<=dc_value_r; pred_23_o<=dc_value_r;pred_30_o<=DC_30_w; pred_31_o<=dc_value_r; pred_32_o<=dc_value_r; pred_33_o<=dc_value_r;end'd10:beginpred_00_o<=hor_00_w; pred_01_o<=hor_01_w; pred_02_o<=hor_02_w; pred_03_o<=hor_03_w;pred_10_o<=left1_r; pred_11_o<=left1_r; pred_12_o<=left1_r; pred_13_o<=left1_r;pred_20_o<=left2_r; pred_21_o<=left2_r; pred_22_o<=left2_r; pred_23_o<=left2_r;pred_30_o<=left3_r; pred_31_o<=left3_r; pred_32_o<=left3_r; pred_33_o<=left3_r;end'd26:beginpred_00_o<=ver_00_w; pred_01_o<=top1_r; pred_02_o<=top2_r; pred_03_o<=top3_r;pred_10_o<=ver_10_w; pred_11_o<=top1_r; pred_12_o<=top2_r; pred_13_o<=top3_r;pred_20_o<=ver_20_w; pred_21_o<=top1_r; pred_22_o<=top2_r; pred_23_o<=top3_r;pred_30_o<=ver_30_w; pred_31_o<=top1_r; pred_32_o<=top2_r; pred_33_o<=top3_r;enddefault:beginif(mode_r1>=18)beginpred_00_o<=pre_0_0_w; pred_01_o<=pre_0_1_w; pred_02_o<=pre_0_2_w; pred_03_o<=pre_0_3_w;pred_10_o<=pre_1_0_w; pred_11_o<=pre_1_1_w; pred_12_o<=pre_1_2_w; pred_13_o<=pre_1_3_w;pred_20_o<=pre_2_0_w; pred_21_o<=pre_2_1_w; pred_22_o<=pre_2_2_w; pred_23_o<=pre_2_3_w;pred_30_o<=pre_3_0_w; pred_31_o<=pre_3_1_w; pred_32_o<=pre_3_2_w; pred_33_o<=pre_3_3_w;endelse beginpred_00_o<=pre_0_0_w; pred_01_o<=pre_1_0_w; pred_02_o<=pre_2_0_w; pred_03_o<=pre_3_0_w;pred_10_o<=pre_0_1_w; pred_11_o<=pre_1_1_w; pred_12_o<=pre_2_1_w; pred_13_o<=pre_3_1_w;pred_20_o<=pre_0_2_w; pred_21_o<=pre_1_2_w; pred_22_o<=pre_2_2_w; pred_23_o<=pre_3_2_w;pred_30_o<=pre_0_3_w; pred_31_o<=pre_1_3_w; pred_32_o<=pre_2_3_w; pred_33_o<=pre_3_3_w;endendendcaseend
end相关文章:
H.265硬件视频编码器xk265代码阅读 - 帧内预测
源代码地址: https://github.com/openasic-org/xk265 帧内预测具体逻辑包含在代码xk265\rtl\rec\rec_intra\intra_pred.v 文件中。 module intra_pred() 看起来是每次计算某个4x4块的预测像素值。 以下代码用来算每个pred_angle的具体数值,每个mode_i对应…...
Arcgis经纬线标注设置(英文、刻度显示)
在arcgis软件中绘制地图边框,添加经纬度度时常常面临经纬度出现中文,如下图所示: 解决方法,设置一下Arcgis的语言 点击高级--确认 这样Arcgis就转为英文版了,此时在来看经纬线刻度的标注,自动变成英文...

MCP协议,.Net 使用示例
服务器端示例 基础服务器 以下是一个基础的 MCP 服务器示例,它使用标准输入输出(stdio)作为传输方式,并实现了一个简单的回显工具: using Microsoft.Extensions.DependencyInjection; using Microsoft.Extensions.H…...
Windows安装Ollama并指定安装路径(默认C盘)
手打不易,如果转摘,请注明出处! 注明原文:http://blog.csdn.net/q258523454/article/details/147289192 一、下载Ollama 访问Ollama官网 打开浏览器,访问Ollama的官方网站:https://ollama.ai/。 在官网首页…...

微信小程序中大型项目开发实战指南
🌐从架构设计到性能优化:微信小程序中大型项目开发实战指南 本文将深入探讨微信小程序在中大型项目开发中的架构设计、组件化方案、状态管理、性能优化策略、网络请求封装等核心内容,帮助你构建高质量、可维护、易扩展的小程序工程。 &#x…...

读《思考的框架有感》
书名 :《思考的框架》一沙恩.帕里什 汉隆剃刀定律目前已经难以溯源。它指的是,能解释为愚蠢的,就不要解释为恶意。在复杂的世界中,使用这一模型有助于我们避免妄想和偏执。如果我们拒绝假定一切糟糕的结果都是坏人的错…...
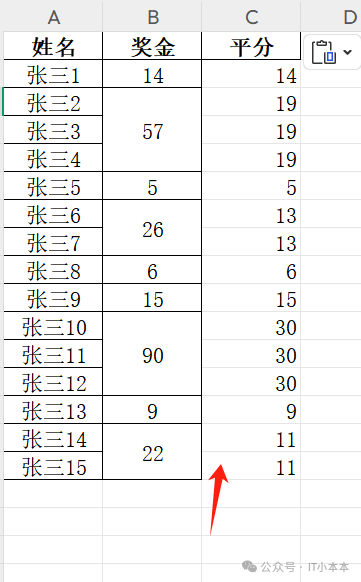
Python自动化处理奖金分摊:基于连续空值的智能分配算法升级
Python自动化处理奖金分摊:基于连续空值的智能分配算法升级 原创 IT小本本 IT小本本 2025年04月04日 02:00 北京 引言 在企业薪酬管理中,团队奖金分配常涉及复杂的分摊规则。传统手工分摊不仅效率低下,还容易因人为疏漏导致分配不公。 本文…...
AI工具箱源码+成品网站源码+springboot+vue
大家好,今天给大家分享一个靠AI广告赚钱的项目:AI工具箱成品网站源码,源码支持二开,但不允许转售!! 本人专门为小型企业和个人提供的解决方案。 不懂技术的也可以直接部署工具箱网站,成为站长&…...

centos7停服yum更新kernel失败解决办法
yum更新kernel均失败 由于centos停服,使用yum源安装内核失败 # rpm --import https://www.elrepo.org/RPM-GPG-KEY-elrepo.org# yum -y install https://www.elrepo.org/elrepo-release-7.0-4.el7.elrepo.noarch.rpm Loaded plugins: fastestmirror elrepo-release…...
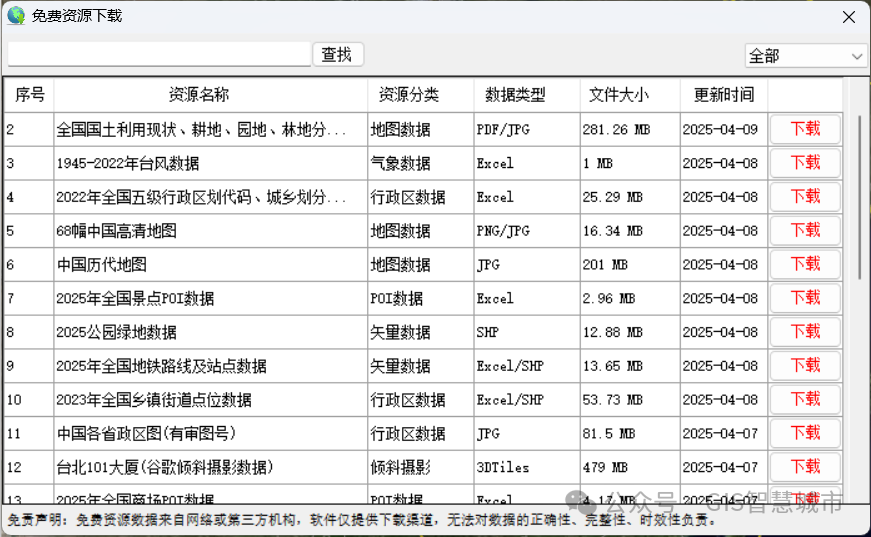
如何下载免费地图数据?
按照以下步骤下载免费地图数据。 1、安装GIS地图下载器 从GeoSaaS(.COM)官网下载“GIS地图下载器”软件:,安装完成后桌面上出现”GIS地图下载器“图标。 双击桌面图标打开”GIS地图下载器“ 2、下载地图数据 点击主界面底部的“…...
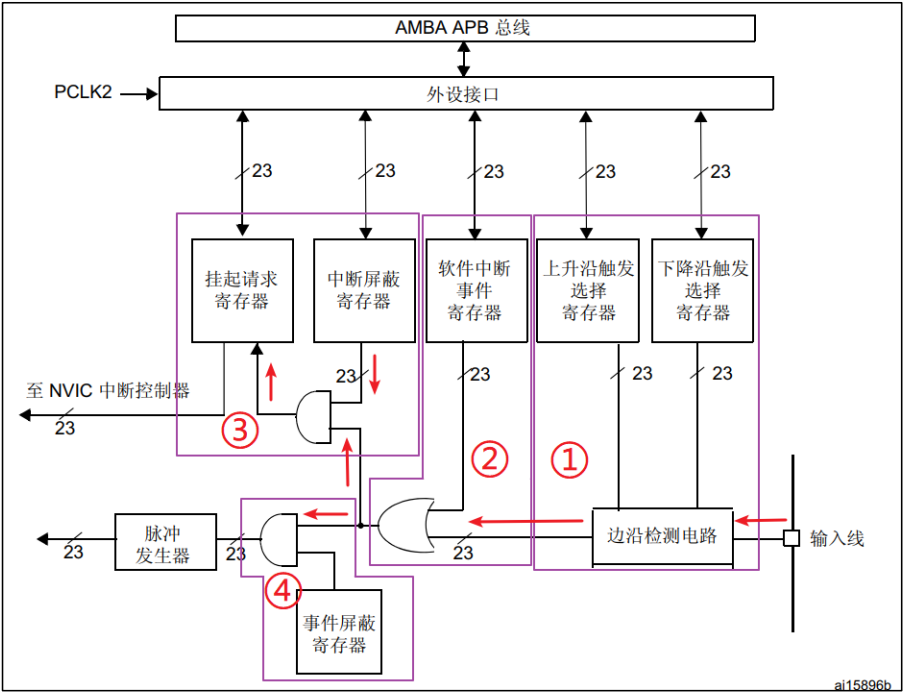
IO 口作为外部中断输入
外部中断 1. NVIC2. EXTI 1. NVIC NVIC即嵌套向量中断控制器,它是内核的器件,M3/M4/M7 内核都是支持 256 个中断,其中包含了 16 个系统中断和 240 个外部中断,并且具有 256 级的可编程中断设置。然而芯片厂商一般不会把内核的这些…...

Go 语言实现的简单 CMS Web
Go 语言实现的简单 CMS Web 以下是一个使用 Go 语言实现的简单 CMS Web 演示代码示例, 包含基本的内容管理功能: 项目结构 ### 项目结构 cms-demo/ ├── main.go ├── handlers/ ├── models/ ├── views/ │ ├── home.html │ ├─…...
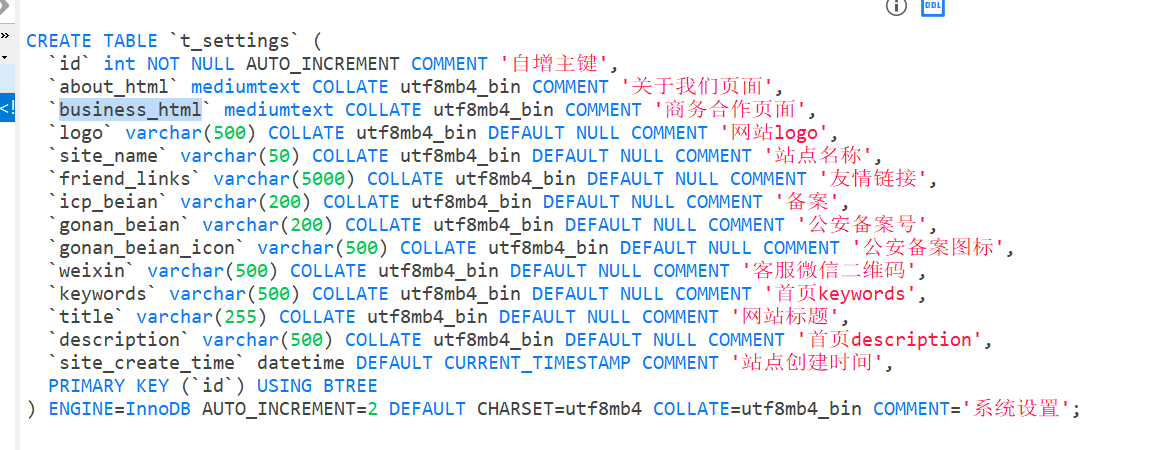
《MySQL基础:了解MySQL周边概念》
1.登录选项的认识 -h:指明登录部署了mysql服务的主机,默认为127.0.0.1-P:指明要访问的端口号,默认为3306-u:指明登录用户-p:指明登录密码 2.什么是数据库 2.1认识数据库 第一点理解。 mysql是数据库的客户…...

Spring boot 知识整理
一、SpringBoot 背景内容梳理 SpringBoot是一个基于Spring框架的开源框架,用于简化Spring应用程序的初始搭建和开发过程。它通过提供约定优于配置的方式,尽可能减少开发者的工作量,使得开发Spring应用变得更加快速、便捷和高效。 SpringBoot…...
transformer 规范化层
目标 了解规范化层的作用掌握规范化层的实现过程 作用 所有的深层网络模型都需要标准网络层, 因为随着网络层数量的增加, 通过多层的计算后参数可能出现过大或者过小的情况, 这样可能导致在学习过程出现异常, 模型可能收敛比较慢,因此都会在一定的层数后接规范化层进行数值的…...
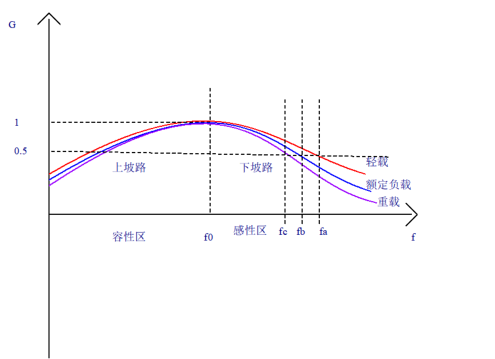
RCL谐振电压增益曲线
谐振电路如何通过调频实现稳压? 为什么要做谐振? 在谐振状态实现ZVS导通,小电流关断 电压增益GVo/Vin,相当于产出投入比 当ff0时,G1时,输出电压输入电压 当G<1时,输出电压<输入电压 …...
JavaScript:表单及正则表达式验证
今天我要介绍的是在JavaScript中关于表单验证内容的知识点介绍: 关于表单验证,我接下来则直接将内容以及效果显示出来并作注解,这样可以清晰看见这个表达验证的妙用: <form id"ff" action"https://www.baidu.…...
一、Appium环境安装
找了一圈操作手机的工具或软件,踩了好多坑,最后决定用这个工具(影刀RPA手机用的也是这个),目前最新的版本是v2.17.1,是基于nodejs环境的,有两种方式,我只试了第一种方式,第二种方式应该是比较简…...
:用数据驱动企业发展的深度解析)
精益数据分析(3/126):用数据驱动企业发展的深度解析
精益数据分析(3/126):用数据驱动企业发展的深度解析 大家好!一直以来,我都坚信在当今竞争激烈的商业环境中,数据是企业获得竞争优势的关键。最近深入研究《精益数据分析》这本书,收获颇丰&…...

暂存一下等会写
#include<easyx.h> IMAGE SNOW 图形变量 struct MOVE生存结构体 {int x0;int y0; bool livefalse;}; initgraph(800, 800);初始化图形界面 MOVE snowflake[5000];目标数量 loadimage(&SNOW, "snow.png");加载图片 BeginBatchDraw(); 开始批量绘图。…...

【c++深入系列】:new和delete运算符详解
🔥 本文专栏:c 🌸作者主页:努力努力再努力wz 💪 今日博客励志语录: “生活不会向你许诺什么,尤其不会向你许诺成功。它只会给你挣扎、痛苦和煎熬的过程。但只要你坚持下去,终有一天&…...
正弦波有效值和平均值(学习笔记)
一个周期的正弦波在坐标轴上围的面积有多大? 一般正弦波以 y Asin(wx)表示,其中A为振幅,W为角速度。周期T 2π/w; 确定积分区间是x 0,到x 2π。 计算绝对值积分: 变量代还:wx θ,dx dθ…...

《分布式软总线架构下,设备虚拟化技术的深度剖析与优化策略》
设备之间的互联互通和协同工作已成为一种趋势。分布式软总线架构作为实现这一目标的关键技术,为不同设备之间的通信和协作提供了基础。而设备虚拟化技术则是在分布式软总线架构下,进一步提升设备资源利用效率的重要手段。本文将深入探讨在分布式软总线架…...
)
首次打蓝桥杯总结(c/c++B组)
目录 一、对每个题进行总结 1.填空题 2.第一个大题---可分解的正整数(10--3) 3.第二道大题---产值调整(10--3) 4.第三道大题---画展部署(15--7) 5.第四道大题---水质检测(15--3&#x…...

第八天 开始Unity Shader的学习之Blinn-Phong光照模型
Unity Shader的学习笔记 第八天 开始Unity Shader的学习之Blinn-Phong光照模型 文章目录 Unity Shader的学习笔记前言一、Blinn-Phong光照模型①计算高光反射部分效果展示 二、召唤神龙:使用Unity内置的函数总结 前言 今天我们编写另一种高光反射的实现方法 – Blinn光照模型…...

游戏NPC对话AI生成的管理调用系统设计
系统概述 游戏与故事人物对话模拟系统 此系统旨在模拟游戏或故事场景里人物的对话。它具备创建游戏与人物信息的功能,并且能借助输入游戏、人物、时间、地点、场景等信息,调用 OpenAI 格式的接口(通过One Api支持DeepSeek之类的其他AI)得到人物的对话内容…...

Go:使用共享变量实现并发
竞态 在串行程序中,步骤执行顺序由程序逻辑决定;而在有多个 goroutine 的并发程序中,不同 goroutine 的事件先后顺序不确定,若无法确定两个事件先后,它们就是并发的。若一个函数在并发调用时能正确工作,称…...

豆瓣图书数据采集与可视化分析
文章目录 一、适用题目二、豆瓣图书数据采集1. 图书分类采集2. 爬取不同分类的图书数据3. 各个分类数据整合 三、豆瓣图书数据清洗四、数据分析五、数据可视化1. 数据可视化大屏展示 源码获取看下方名片 一、适用题目 基于Python的豆瓣图书数据采集与分析基于Python的豆瓣图书…...
常见的爬虫算法
1.base64加密 base64是什么 Base64编码,是由64个字符组成编码集:26个大写字母AZ,26个小写字母az,10个数字0~9,符号“”与符号“/”。Base64编码的基本思路是将原始数据的三个字节拆分转化为四个字节,然后…...

Numpy常用库方法总结
numpy的底层是ndarray,也就是矩阵结构 对于ndarray结构来说,里面所有的元素必须是同一类型的 如果不是的话,会自动的向下进行转换 list [1,2,3,4,5] array np.array(list) array输出:array([1, 2, 3, 4, 5]) 1.1 ndarray基本…...