【ROS】代价地图
【ROS】代价地图
- 前言
- 代价地图(Costmap)概述
- 代价地图的参数
- `costmap_common_params.yaml` 参数说明
- `costmap_common_params.yaml` 示例说明
- `global_costmap.yaml` 参数说明
- `global_costmap.yaml` 示例说明
- `local_costmap.yaml` 参数说明
- `local_costmap.yaml` 示例说明
- 在 RViz 中查看代价地图
前言
本文将介绍 ROS 导航系统中 move_base 节点的核心模块之一——代价地图(Costmap)。
代价地图以二维栅格地图的形式,对机器人所处环境中的每个区域进行“通行代价”的量化评估,也就是衡量机器人经过该区域的风险和难度。代价越高,意味着该区域越危险或越不适宜通行。
ROS 中的代价地图主要分为两类:
- 全局代价地图(Global Costmap):基于静态地图构建,覆盖整个环境范围,主要用于全局路径规划。
- 局部代价地图(Local Costmap):基于机器人实时传感器(如激光雷达)感知到的障碍物信息构建,反映当前机器人周围的动态环境,主要用于局部避障和路径微调。
我的环境:
本教程使用的环境是:实体 ROS 小车,Ubuntu 18.04,ROS1 Melodic
参考资料:
- ROS导航系统 | 代价地图 Costmap
- ROS导航系统 | 代价地图的参数设置
代价地图(Costmap)概述
关于代价地图的概念与原理,推荐参考以下视频中 0–5 分钟的内容,讲解清晰,通俗易懂:
- ROS 导航系统 | 代价地图 Costmap
代价地图的参数
ROS 中的代价地图配置通常涉及三个参数文件:
-
costmap_common_params.yaml:
用于配置全局和局部代价地图的通用参数,如地图分辨率、机器人半径、障碍物膨胀半径等,主要影响代价地图的形状和结构。由于它同时作用于全局与局部代价地图,集中配置可避免参数冲突和重复设置。 -
global_costmap_params.yaml:
专用于全局代价地图的配置,包含其计算范围、更新频率等参数。用于支持全局路径规划任务。 -
local_costmap_params.yaml:
专用于局部代价地图的配置,用于定义其感知范围、更新频率等参数。支持机器人动态避障和轨迹调整。
将这三个文件合理配置,是实现稳定导航和精确路径规划的关键。
costmap_common_params.yaml 参数说明
该文件配置了代价地图的通用参数,影响机器人在地图中的碰撞判断与导航行为。以下是常用关键参数说明:
-
robot_radius:
机器人底盘的半径。代价地图会以此为基础设置“核心不可通行区域”,确保机器人不会碰撞到障碍物。 -
inflation_radius:
膨胀区域半径,即障碍物外围的“ 风险缓冲区 ”。距离障碍越近,通行代价越高。这个区域机器人仍可进入,但接近障碍的风险更大。

-
obstacle_range:
表示将激光雷达检测到的多少米范围内的障碍物纳入代价地图。一般设置为激光雷达有效探测距离,或稍小一些以剔除不稳定数据。 -
raytrace_range:
表示在该范围内的空旷区域(激光束穿过且未检测到障碍物的栅格)将被视为无障碍,并用于清除动态障碍物残留的“阴影”。 -
observation_sources:
指定障碍物信息的来源(可为激光雷达、深度摄像头等)。名称可自定义,但需与下方对应配置保持一致。
costmap_common_params.yaml 示例说明
# 机器人本体参数
robot_radius: 0.25 # 机器人半径(单位:米),可适当设置略大以预留安全空间,避免碰撞# 膨胀层参数
inflation_radius: 0.5 # 膨胀半径(米),用于在障碍物周围添加安全距离# 设置过大会导致通行区域变小,设置过小则增大碰撞风险# 障碍物层参数
obstacle_range: 6.0 # 将动态障碍物更新到局部代价地图的最大检测距离(米)# 超过此距离(6m)的动态障碍物更新到局部代价地图中# 一般设为激光雷达的有效探测范围# 注意与局部代价地图显示范围无冲突,显示小于检测范围是正常的raytrace_range: 6.0 # 清除动态障碍物的残影的光线追踪距离(米)# 仅在该范围内(6m内)清除动态障碍物的残影# 超出此范围的障碍物不会被自动清除# 传感器数据源配置(可多个)
observation_sources: base_lidar head_kinect2# 底部激光雷达传感器设置
base_lidar:data_type: LaserScan # 传感器数据类型topic: /scan # 订阅的话题名marking: true # 将障碍物添加至代价地图clearing: true # 清除障碍物残影(动态场景使用)# 头部 Kinect2 点云传感器设置
head_kinect2:data_type: PointCloud2 # 点云数据类型topic: /kinect2/sd/points # 点云话题名marking: true # 将障碍物添加至代价地图clearing: true # 清除障碍物残影(动态场景使用)max_obstacle_height: 1.5 # 可检测障碍物的最大高度(单位:米)min_obstacle_height: 0.2 # 可检测障碍物的最小高度(单位:米)
global_costmap.yaml 参数说明
global_costmap:命名空间,表示以下参数都属于全局代价地图配置。global_frame:地图坐标系的名称,一般为"map"。robot_base_frame:机器人底盘坐标系的名称,通常为"base_footprint"或"base_link"。static_map:是否将map_server发布的地图作为初始静态地图。- 若为
true,使用现有的静态地图(适用于已知环境)。 - 若为
false,初始地图为空,需依赖动态建图机制(适用于未知环境导航任务)。
- 若为
update_frequency:地图更新频率,即传感器观测数据更新到全局代价地图的频率(Hz)。publish_frequency:发布频率,用于将全局代价地图发送给 RViz 等工具进行可视化的频率(Hz)。transform_tolerance:TF 容忍时间(单位:秒),用于处理 TF 超时问题。- 如果提示
TF timeout报错,可适当增大该值以提升鲁棒性。
- 如果提示
global_costmap.yaml 示例说明
global_costmap:global_frame: map # 全局坐标系,通常是地图坐标系robot_base_frame: base_footprint # 机器人基坐标系static_map: true # 是否使用静态地图update_frequency: 1.0 # 地图更新频率 (Hz)publish_frequency: 1.0 # 地图发布频率 (Hz)transform_tolerance: 1.0 # 坐标变换容忍度 (秒)
local_costmap.yaml 参数说明
local_costmap:命名空间,表示以下参数属于局部代价地图配置。global_frame:地图坐标系的名称,一般设置为"odom",用于防止障碍物跳变。robot_base_frame:机器人底盘坐标系的名称,通常为"base_footprint"或"base_link"。static_map:是否使用map_server发布的静态地图作为初始地图。通常设置为false,因为局部规划阶段是基于实时传感器数据(如激光雷达)生成临时地图进行规划和避障。rolling_window:局部代价地图的范围是否随机器人移动。通常设置为true,确保局部代价地图与机器人实时更新。width:局部代价地图的宽度。height:局部代价地图的高度。update_frequency:地图更新频率(Hz),即传感器数据更新到局部代价地图的频率。通常设置为激光雷达的扫描频率,以确保实时反应。publish_frequency:地图发布频率(Hz),即将局部代价地图发布给 RViz 等工具的频率。transform_tolerance:TF 容忍时间(秒),用于处理 TF 超时问题。如果出现TF timeout错误,可以适当增大该值以提升系统鲁棒性。
local_costmap.yaml 示例说明
local_costmap:global_frame: odom # 全局坐标系,通常是里程计坐标系robot_base_frame: base_footprint # 机器人基坐标系static_map: false # 是否使用静态地图rolling_window: true # 是否开启滚动窗口模式width: 3.0 # 地图宽度 (米)height: 3.0 # 地图高度 (米)update_frequency: 10.0 # 地图更新频率 (Hz)publish_frequency: 10.0 # 地图发布频率 (Hz)transform_tolerance: 1.0 # 坐标变换容忍度 (秒)
在 RViz 中查看代价地图
在 RViz 中查看代价地图的步骤如下:
- 添加
map显示器。 - 修改显示名称为
global_costmap或local_costmap,以对应全局或局部代价地图。 - 订阅话题
/move_base/global_costmap/costmap或/move_base/local_costmap/costmap。 - 将颜色方案(Color Scheme)设置为
costmap,以便直观查看代价地图的效果。
这样,你就可以在 RViz 中清晰地看到代价地图的显示效果。
相关文章:
【ROS】代价地图
【ROS】代价地图 前言代价地图(Costmap)概述代价地图的参数costmap_common_params.yaml 参数说明costmap_common_params.yaml 示例说明global_costmap.yaml 参数说明global_costmap.yaml 示例说明local_costmap.yaml 参数说明local_costmap.yaml 示例说明…...
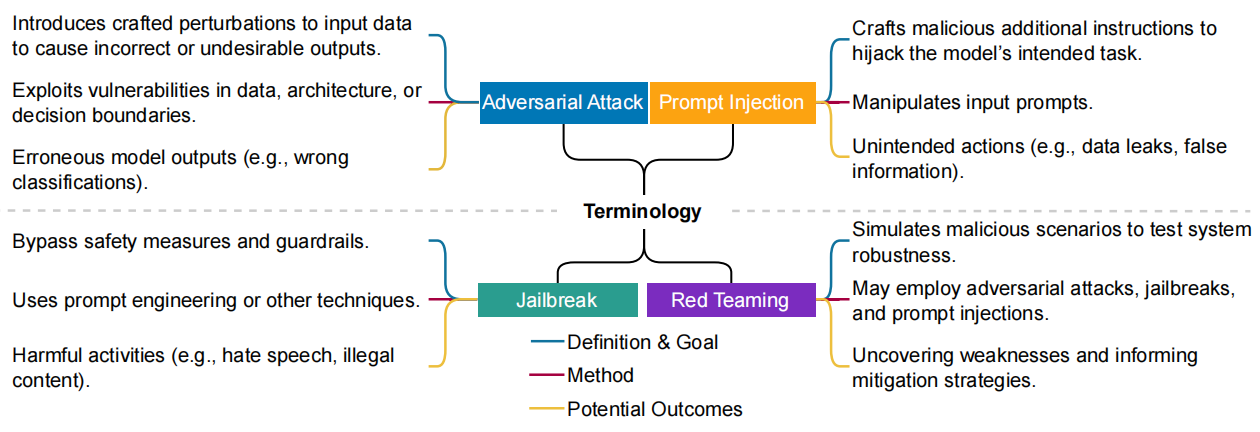
《Against The Achilles’ Heel: A Survey on Red Teaming for Generative Models》全文阅读
《Against The Achilles’ Heel: A Survey on Red Teaming for Generative Models》 突破阿基里斯之踵:生成模型红队对抗综述 摘要 生成模型正迅速流行并被整合到日常应用中,随着各种漏洞暴露,其安全使用引发担忧。鉴于此,红队…...
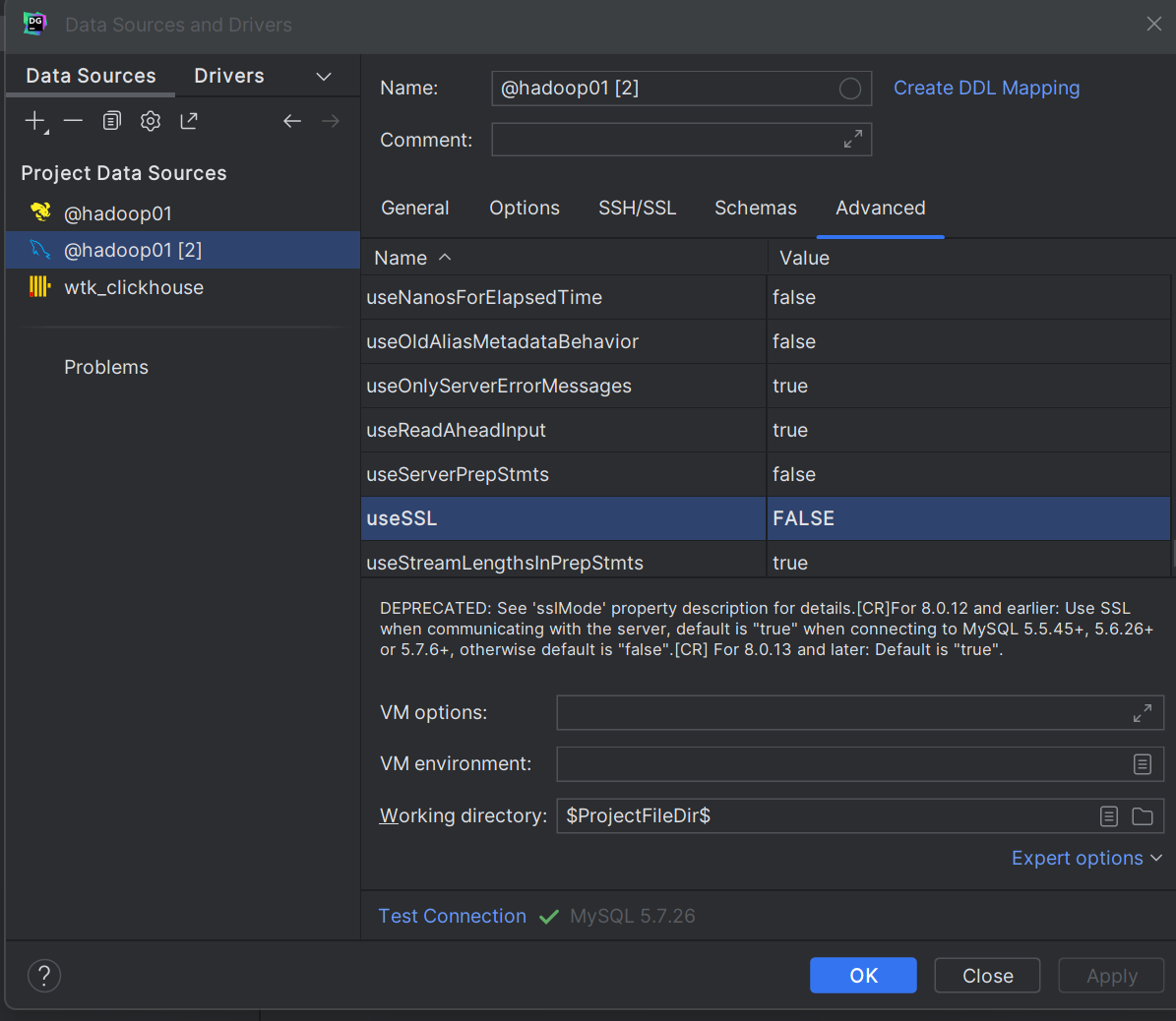
datagrip连接mysql问题5.7.26
1.Case sensitivity: plainmixed, delimitedexac Remote host terminated the handshake. 区分大小写:plain混合,分隔exac 远程主机终止了握手。 原因:usessl 参数用于指定是否使用 SSL(Secure Sockets Layer)加密来保护数据传…...

文件内容课堂总结
Spark-SQL连接Hive Apache Hive是Hadoop上的SQL引擎,Spark SQL编译时可选择是否包含Hive支持。包含Hive支持的版本支持Hive表访问、UDF及HQL。生产环境推荐编译时引入Hive支持。 内嵌Hive 直接使用无需配置,但生产环境极少采用。 外部Hive 需完成以下配置…...

探索亮数据Web Unlocker API:让谷歌学术网页科研数据 “触手可及”
本文目录 一、引言二、Web Unlocker API 功能亮点三、Web Unlocker API 实战1.配置网页解锁器2.定位相关数据3.编写代码 四、Web Scraper API技术亮点 五、SERP API技术亮点 六、总结 一、引言 网页数据宛如一座蕴藏着无限价值的宝库,无论是企业洞察市场动态、制定…...

AF3 create_alignment_db_sharded脚本process_chunk函数解读
AlphaFold3 create_alignment_db_sharded 脚本在源代码的scripts/alignment_db_scripts文件夹下。该脚本中的 process_chunk 函数通过调用 read_chain_dir 函数,读取每个链的多序列比对(MSA)文件并整理成统一格式的字典结构chunk_data 返回。 函数功能: read_chain_dir:读…...

【本地MinIO图床远程访问】Cpolar TCP隧道+PicGo插件,让MinIO图床一键触达
写在前面:本博客仅作记录学习之用,部分图片来自网络,如需引用请注明出处,同时如有侵犯您的权益,请联系删除! 文章目录 前言MinIO本地安装与配置cpolar 内网穿透PicGo 安装MinIO远程访问总结互动致谢参考目录…...

PyTorch的benchmark模块
PyTorch的benchmark模块主要用于性能测试和优化,包含核心工具库和预置测试项目两大部分。以下是其核心功能与使用方法的详细介绍: 1. 核心工具:torch.utils.benchmark 这是PyTorch内置的性能测量工具,主要用于代码片段的执行时间…...

Spring Boot 参数校验 Validation 终极指南
1. 概述 Spring Validation 基于 JSR-303(Bean Validation)规范,通过Validated注解实现声明式校验。核心优势: 零侵入性:基于 AOP 实现方法拦截校验规范统一:兼容 Bean Validation 标准注解功能扩展&…...
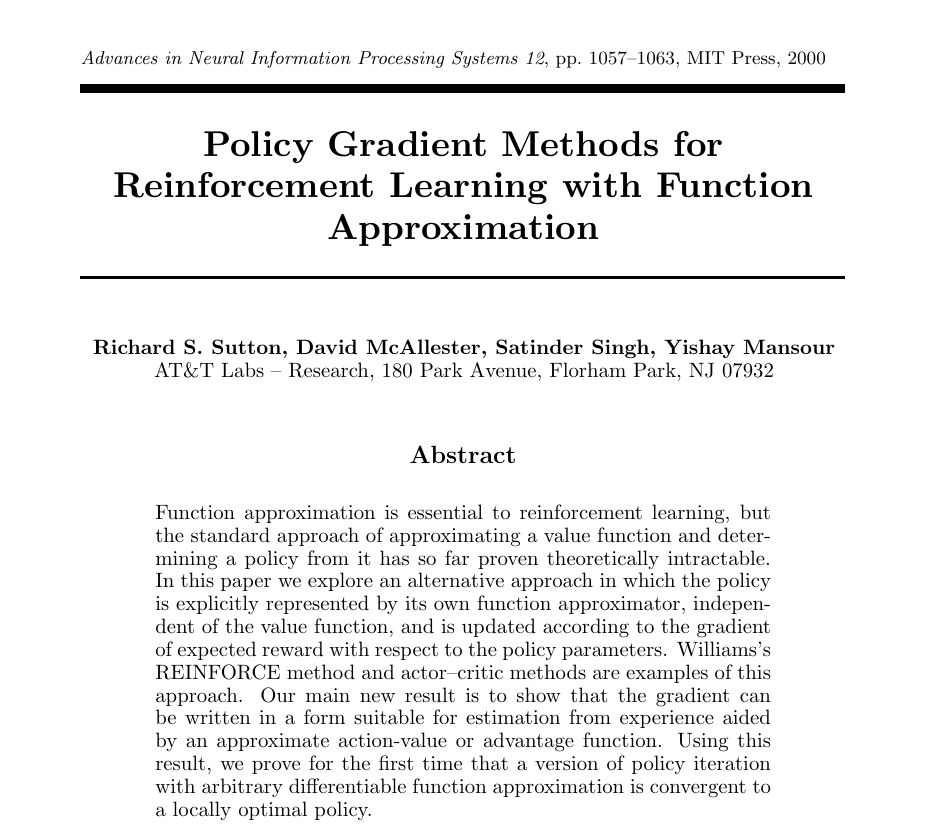
Policy Gradient思想、REINFORCE算法,以及贪吃蛇小游戏(一)
文章目录 Policy Gradient思想论文REINFORCE算法论文Policy Gradient思想和REINFORCE算法的关系用一句人话解释什么是REINFORCE算法策略这个东西实在是太抽象了,它可以是一个什么我们能实际感受到的东西?你说的这个我理解了,但这个东西,我怎么优化?在一堆函数中,找到最优…...

Angular 框架详解:从入门到进阶
Hi,我是布兰妮甜 !在当今快速发展的 Web 开发领域,Angular 作为 Google 主导的企业级前端框架,以其完整的解决方案、强大的类型系统和丰富的生态系统,成为构建大型复杂应用的首选。不同于其他渐进式框架,An…...
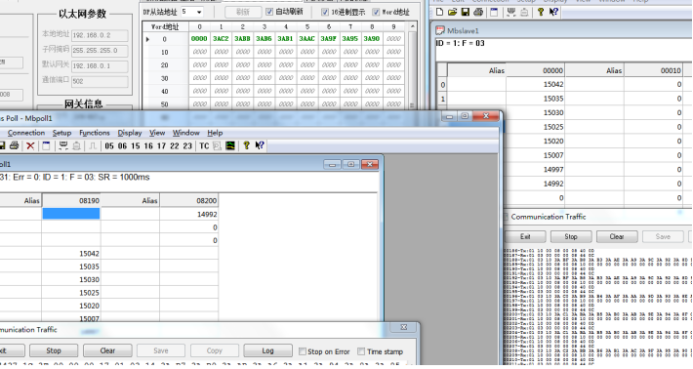
Profibus DP主站转modbusTCP网关与dp从站通讯案例
Profibus DP主站转modbusTCP网关与dp从站通讯案例 在当前工业自动化的浪潮中,不同协议之间的通讯转换成为了提升生产效率和实现设备互联的关键。Profibus DP作为一种广泛应用的现场总线技术,与Modbus TCP的结合,为工业自动化系统的集成带来了…...
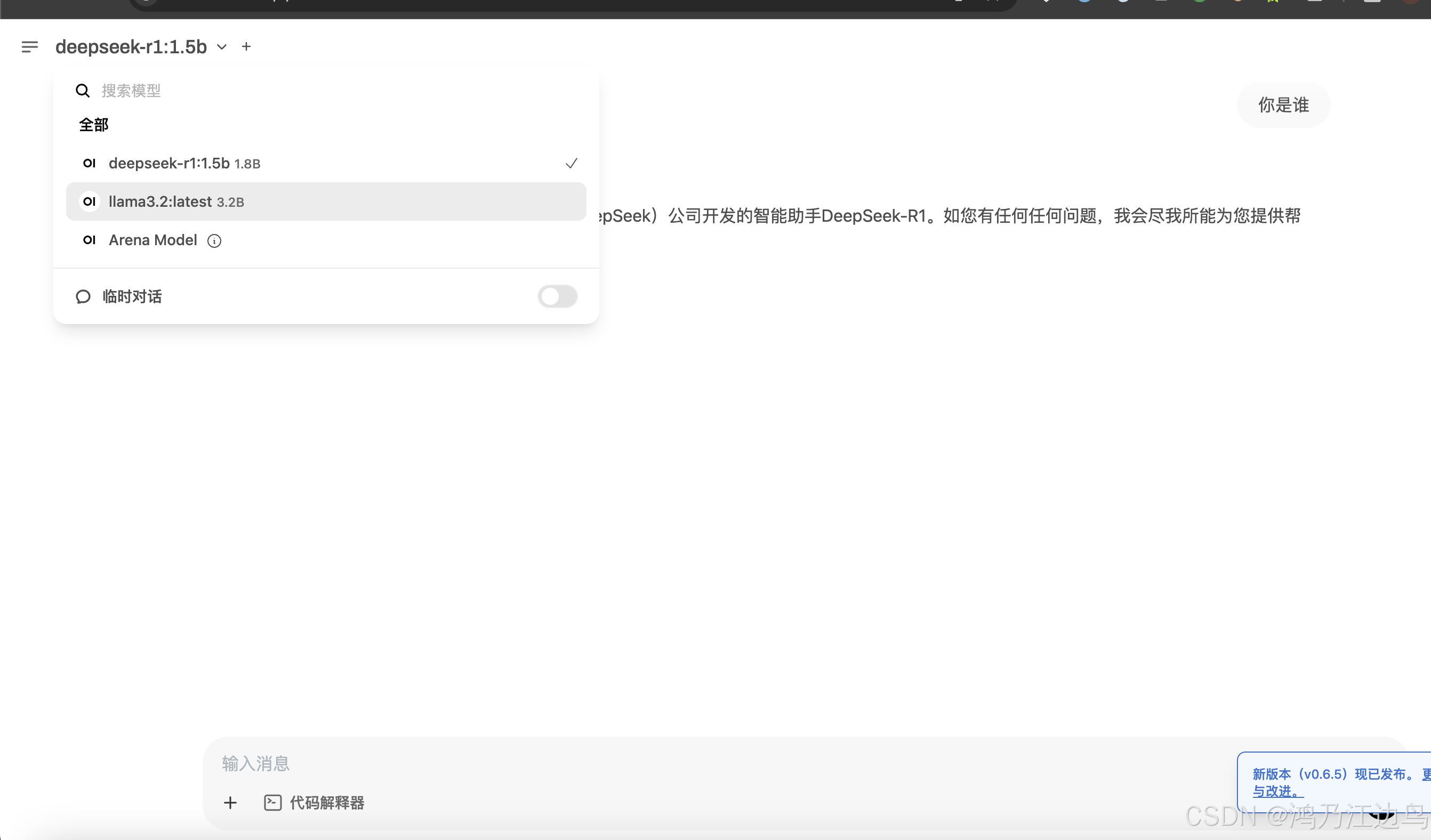
快速部署大模型 Openwebui + Ollama + deepSeek-R1模型
背景 本文主要快速部署一个带有web可交互界面的大模型的应用,主要用于开发测试节点,其中涉及到的三个组件为 open-webui Ollama deepSeek开放平台 首先 Ollama 是一个开源的本地化大模型部署工具,提供与OpenAI兼容的Api接口,可以快速的运…...

Ethan独立开发产品日报 | 2025-04-15
1. Whatting 专属于你的iPad日记 还在Goodnotes里使用PDF模板吗?是时候告别到处翻找PDF的日子了——来试试Whatting吧!在Whatting中,你可以根据自己的喜好,灵活组合小部件,打造专属的日记布局。今天就免费开始吧&…...
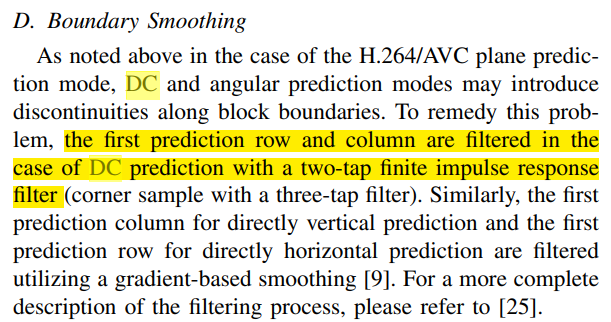
H.265硬件视频编码器xk265代码阅读 - 帧内预测
源代码地址: https://github.com/openasic-org/xk265 帧内预测具体逻辑包含在代码xk265\rtl\rec\rec_intra\intra_pred.v 文件中。 module intra_pred() 看起来是每次计算某个4x4块的预测像素值。 以下代码用来算每个pred_angle的具体数值,每个mode_i对应…...
Arcgis经纬线标注设置(英文、刻度显示)
在arcgis软件中绘制地图边框,添加经纬度度时常常面临经纬度出现中文,如下图所示: 解决方法,设置一下Arcgis的语言 点击高级--确认 这样Arcgis就转为英文版了,此时在来看经纬线刻度的标注,自动变成英文...

MCP协议,.Net 使用示例
服务器端示例 基础服务器 以下是一个基础的 MCP 服务器示例,它使用标准输入输出(stdio)作为传输方式,并实现了一个简单的回显工具: using Microsoft.Extensions.DependencyInjection; using Microsoft.Extensions.H…...
Windows安装Ollama并指定安装路径(默认C盘)
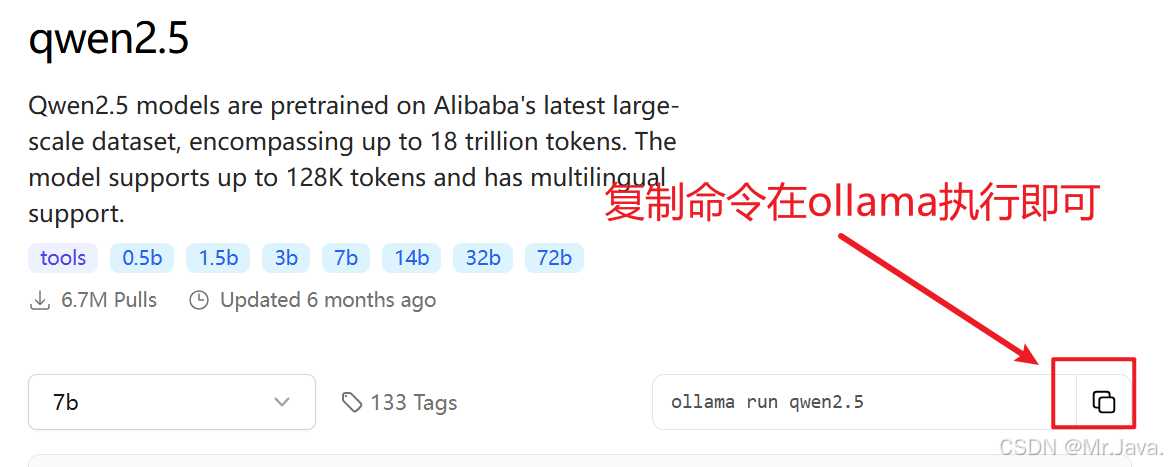
手打不易,如果转摘,请注明出处! 注明原文:http://blog.csdn.net/q258523454/article/details/147289192 一、下载Ollama 访问Ollama官网 打开浏览器,访问Ollama的官方网站:https://ollama.ai/。 在官网首页…...

微信小程序中大型项目开发实战指南
🌐从架构设计到性能优化:微信小程序中大型项目开发实战指南 本文将深入探讨微信小程序在中大型项目开发中的架构设计、组件化方案、状态管理、性能优化策略、网络请求封装等核心内容,帮助你构建高质量、可维护、易扩展的小程序工程。 &#x…...

读《思考的框架有感》
书名 :《思考的框架》一沙恩.帕里什 汉隆剃刀定律目前已经难以溯源。它指的是,能解释为愚蠢的,就不要解释为恶意。在复杂的世界中,使用这一模型有助于我们避免妄想和偏执。如果我们拒绝假定一切糟糕的结果都是坏人的错…...
Python自动化处理奖金分摊:基于连续空值的智能分配算法升级
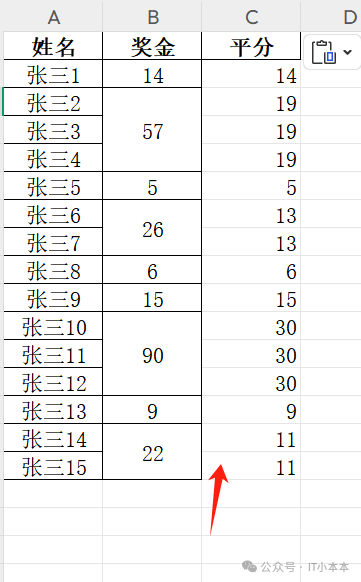
Python自动化处理奖金分摊:基于连续空值的智能分配算法升级 原创 IT小本本 IT小本本 2025年04月04日 02:00 北京 引言 在企业薪酬管理中,团队奖金分配常涉及复杂的分摊规则。传统手工分摊不仅效率低下,还容易因人为疏漏导致分配不公。 本文…...
AI工具箱源码+成品网站源码+springboot+vue
大家好,今天给大家分享一个靠AI广告赚钱的项目:AI工具箱成品网站源码,源码支持二开,但不允许转售!! 本人专门为小型企业和个人提供的解决方案。 不懂技术的也可以直接部署工具箱网站,成为站长&…...

centos7停服yum更新kernel失败解决办法
yum更新kernel均失败 由于centos停服,使用yum源安装内核失败 # rpm --import https://www.elrepo.org/RPM-GPG-KEY-elrepo.org# yum -y install https://www.elrepo.org/elrepo-release-7.0-4.el7.elrepo.noarch.rpm Loaded plugins: fastestmirror elrepo-release…...
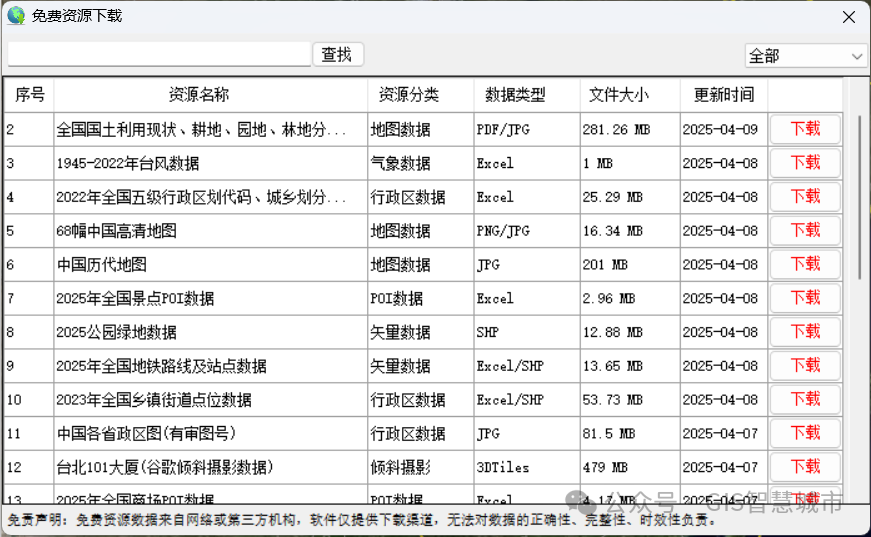
如何下载免费地图数据?
按照以下步骤下载免费地图数据。 1、安装GIS地图下载器 从GeoSaaS(.COM)官网下载“GIS地图下载器”软件:,安装完成后桌面上出现”GIS地图下载器“图标。 双击桌面图标打开”GIS地图下载器“ 2、下载地图数据 点击主界面底部的“…...
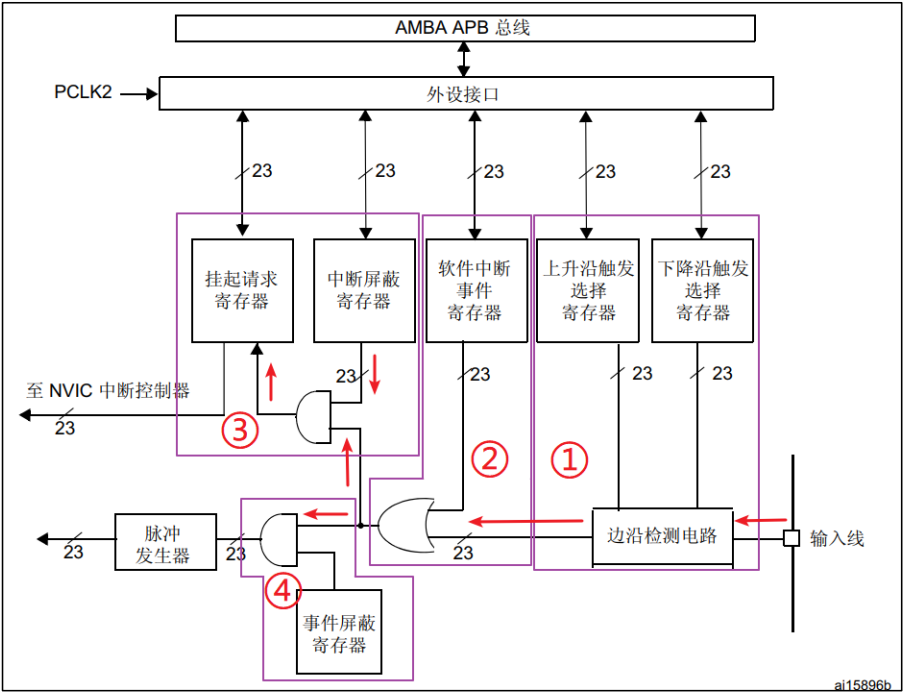
IO 口作为外部中断输入
外部中断 1. NVIC2. EXTI 1. NVIC NVIC即嵌套向量中断控制器,它是内核的器件,M3/M4/M7 内核都是支持 256 个中断,其中包含了 16 个系统中断和 240 个外部中断,并且具有 256 级的可编程中断设置。然而芯片厂商一般不会把内核的这些…...

Go 语言实现的简单 CMS Web
Go 语言实现的简单 CMS Web 以下是一个使用 Go 语言实现的简单 CMS Web 演示代码示例, 包含基本的内容管理功能: 项目结构 ### 项目结构 cms-demo/ ├── main.go ├── handlers/ ├── models/ ├── views/ │ ├── home.html │ ├─…...
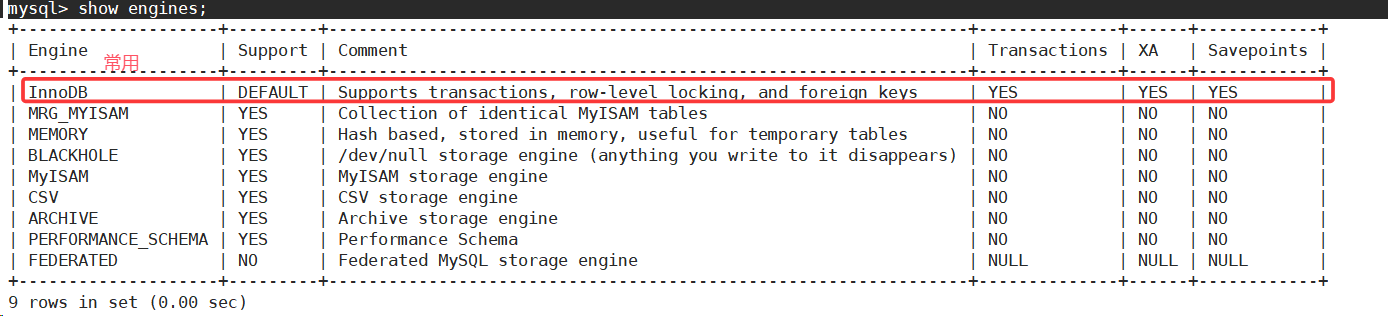
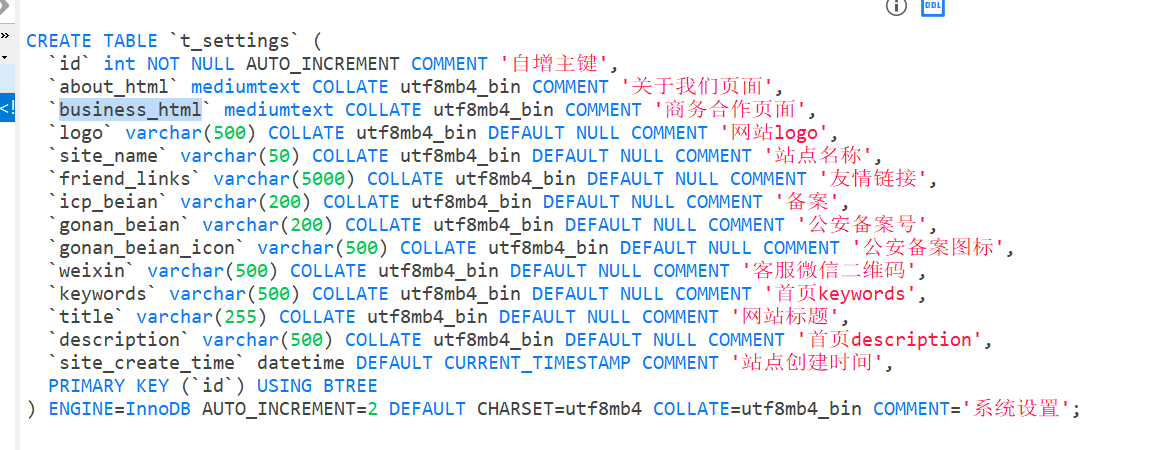
《MySQL基础:了解MySQL周边概念》
1.登录选项的认识 -h:指明登录部署了mysql服务的主机,默认为127.0.0.1-P:指明要访问的端口号,默认为3306-u:指明登录用户-p:指明登录密码 2.什么是数据库 2.1认识数据库 第一点理解。 mysql是数据库的客户…...

Spring boot 知识整理
一、SpringBoot 背景内容梳理 SpringBoot是一个基于Spring框架的开源框架,用于简化Spring应用程序的初始搭建和开发过程。它通过提供约定优于配置的方式,尽可能减少开发者的工作量,使得开发Spring应用变得更加快速、便捷和高效。 SpringBoot…...
transformer 规范化层
目标 了解规范化层的作用掌握规范化层的实现过程 作用 所有的深层网络模型都需要标准网络层, 因为随着网络层数量的增加, 通过多层的计算后参数可能出现过大或者过小的情况, 这样可能导致在学习过程出现异常, 模型可能收敛比较慢,因此都会在一定的层数后接规范化层进行数值的…...
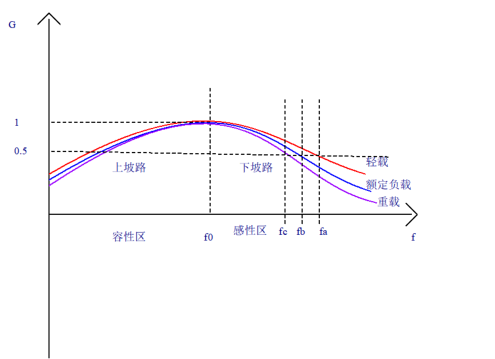
RCL谐振电压增益曲线
谐振电路如何通过调频实现稳压? 为什么要做谐振? 在谐振状态实现ZVS导通,小电流关断 电压增益GVo/Vin,相当于产出投入比 当ff0时,G1时,输出电压输入电压 当G<1时,输出电压<输入电压 …...