VR和眼动控制集群机器人的方法
西安建筑科技大学信息与控制工程学院雷小康老师团队联合西北工业大学航海学院彭星光老师团队,基于虚拟现实(VR)和眼动追踪技术实现了人-集群机器人高效、灵活的交互控制。相关研究论文“基于虚拟现实和眼动的人-集群机器人交互方法” 发表于信息与控制科学领域期刊《信息与控制》。
NOKOV度量动作捕捉系统建立了真实机器人运动状态与其数字孪生主体之间的状态互联,在VR场景中实时更新机器人运动状态,提高操作员的沉浸感和机器人集群态势的感知效率。
引用格式
XU Mingyu, LEI Xiaokang, DUAN Zhongxing, XIANG Yalun, DUAN Mengyuan, ZHENG Zhicheng, PENG Xingguang. Human-Swarm Robots Interaction Approach Based on Virtual Reality and Eye Tracking[J]. INFORMATION AND CONTROL, 2024, 53(2): 199-210. DOI: 10.13976/j.cnki.xk.2023.2548
研究背景
集群机器人具有高鲁棒性、可扩展性及并行协同作业等优点,在大范围多目标任务的执行中具有独特优势,这种优势结合人类的决策智慧后,能够有效提高集群机器人系统的可靠性、适应性及智能化水平。然而,依靠手势、语音等媒介的传统人-集群机器人交互(HSI)方式在面对被控对象众多、群体态势感知困难等挑战时,存在效率低下、灵活性不足等问题。为解决这些问题,实现高效、便捷、沉浸感强的HSI方法,研究团队基于VR和眼动追踪技术展开相关研究。
本文贡献
-
提出一种融合VR和眼动追踪的人-集群机器人交互方法,该方法具有沉浸感强、灵活、便捷的特点。
-
基于VR的交互方法可克服机器人超视距及环境状况不佳的影响,同时返回机器人群体态势,实现集群机器人数字孪生。
交互流程
本研究提出的基于VR和眼动追踪的HSI方法流程涉及搭建虚拟场景、眼动数据采集与处理以及指令发送与执行三个环节。
搭建虚拟场景:构建集群机器人及环境的VR场景,并通过VR眼镜传输给操作员。利用NOKOV度量动作捕捉系统实现真实机器人运动状态与虚拟环境中数字孪生主体的实时同步。
眼动数据采集与处理:安装在VR眼镜上的眼动传感器实时捕捉操作员的眼动数据,并传输至处理计算机。经预处理和解析后,生成运动控制指令。
指令发送与执行:将眼动控制指令发送至集群机器人,机器人接收并执行相应的动作。
 图片:人-集群机器人交互系统整体方案
图片:人-集群机器人交互系统整体方案
控制规则
集群漫游交互规则:将眼球的上下左右运动直接映射为机器人的运动方向。
集群目标追踪交互规则:通过眼动射线锁定目标,驱动机器人朝向目标运动。
集群轨迹跟踪交互规则:利用眼动轨迹引导机器人集群沿预设轨迹运动。
现场试验
研究利用 SwarmBang 机器人组成小规模集群开展真实的人-集群机器人交互实验,以验证所提基于VR和眼动的HSI 方法的可行性和有效性。
 图片-真实实验环境与 VR 交互场景
图片-真实实验环境与 VR 交互场景
集群漫游实验
集群漫游实验:操作员通过眼球运动控制机器人向右、左、下、上依次运动,机器人响应迅速,运动轨迹与眼动指令高度一致
集群目标追踪实验
集群目标追踪实验:操作员注视不同目标,机器人快速切换并稳定朝向目标移动,目标激活顺序为1→2→1→2→1(左→右→左→右→左),轨迹清晰
集群轨迹跟踪实验
集群轨迹跟踪实验:操作员通过眼动预设轨迹,机器人沿轨迹平顺移动,成功避开障碍物,轨迹跟踪精准
实验结果表明,基于VR和眼动追踪的HSI方法实现了高效、灵活、强沉浸感的人-集群机器人交互控制。
NOKOV度量动作捕捉系统为实验提供了机器人在真实环境中的实时轨迹数据,用以建立真实机器人运动状态与其数字孪生主体之间的状态互联,从而帮助实现眼动控制指令。
作者简介
许明玉,西安建筑科技大学信息与控制工程学院硕士毕业生。主要研究方向: 人-集群机器人交互,虚拟现实技术
雷小康(通讯作者),西安建筑科技大学信息与控制工程学院副教授、研究生导师。主要研究方向:集群机器人及群体智能等
段中兴,西安建筑科技大学国际教育学院常务副院长,信息与控制工程学院教授。主要研究方向:智能系统与智能信息处理、智能检测与机器视觉、建筑环境控制与节能优化、嵌入式技术与智能系统
向雅伦,西安建筑科技大学信息与控制工程学院硕士毕业生。主要研究方向:集群机器人
段梦园,西安建筑科技大学信息与控制工程学院硕士毕业生。主要研究方向:集群机器人视觉定位
郑志成,西北工业大学航海学院博士在读。主要研究方向:群体智能、集群机器人
彭星光,西北工业大学航海学院教授、博士生导师。主要研究方向:群体智能、演化计算、机器学习及其在无人系统特别是无人集群中的应用
相关文章:
VR和眼动控制集群机器人的方法
西安建筑科技大学信息与控制工程学院雷小康老师团队联合西北工业大学航海学院彭星光老师团队,基于虚拟现实(VR)和眼动追踪技术实现了人-集群机器人高效、灵活的交互控制。相关研究论文“基于虚拟现实和眼动的人-集群机器人交互方法” 发表于信…...

python训练营打卡第26天
函数专题1:函数定义与参数 知识点回顾: 函数的定义变量作用域:局部变量和全局变量函数的参数类型:位置参数、默认参数、不定参数传递参数的手段:关键词参数传递参数的顺序:同时出现三种参数类型时 作业&…...

TiDB 中新 Hash Join 的设计与性能优化
原文来源: https://tidb.net/blog/11667c37 本文作者:徐飞 导读 在数据库管理系统(DBMS)中,连接操作(Join)是查询处理的核心环节之一,其性能直接影响到整个系统的响应速度和效率…...
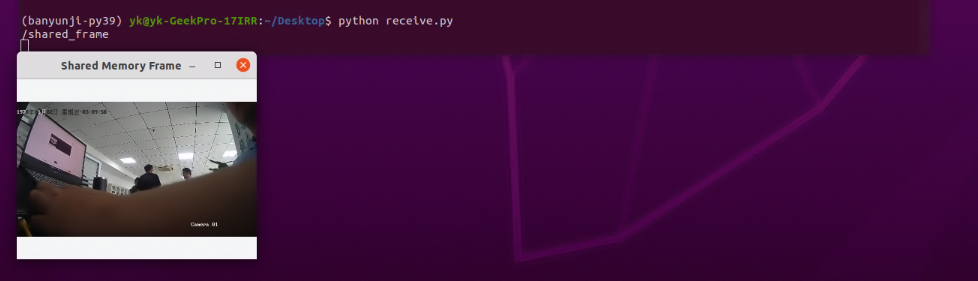
1.共享内存(python共享内存实际案例,传输opencv frame)
主进程程序 send.py import cv2 import numpy as np from multiprocessing import shared_memory, resource_trackercap cv2.VideoCapture(0) if not cap.isOpened():print("无法打开 RTSP 流,请检查地址、网络连接或 GStreamer 配置。") else:# 创建共…...

网页常见水印实现方式
文章目录 1 明水印技术实现1.1 DOM覆盖方案1.2 Canvas动态渲染1.3 CSS伪元素方案2 暗水印技术解析2.1 空域LSB算法2.2 频域傅里叶变换3 防篡改机制设计3.1 MutationObserver防护3.2 Canvas指纹追踪4 前后端实现对比5 攻防博弈深度分析5.1 常见破解手段5.2 进阶防御策略6 选型近…...

oracle主备切换参考
主备正常切换操作参考:RAC两节点->单机 (rac和单机的操作区别:就是关闭其它节点,剩一个节点操作即可) 1.主库准备 检查状态 SQL> select inst_id,database_role,OPEN_MODE from gv$database; INST_ID DATA…...

Java大师成长计划之第25天:Spring生态与微服务架构之容错与断路器模式
📢 友情提示: 本文由银河易创AI(https://ai.eaigx.com)平台gpt-4-turbo模型辅助创作完成,旨在提供灵感参考与技术分享,文中关键数据、代码与结论建议通过官方渠道验证。 在微服务架构中,系统通常…...

【ARM】MDK如何将变量存储到指定内存地址
1、 文档目标 在嵌入式系统开发中,通过MDK(Microcontroller Development Kit)进行工程配置,将指定的变量存储到指定的内存地址上是一项非常重要的技术。这项操作不仅能够满足特定硬件架构的需求,还能优化系统的性能和…...

Unity3D仿星露谷物语开发44之收集农作物
1、目标 在土地中挖掘后,洒下种子后逐渐成长,然后使用篮子收集成熟后的农作物,工具栏中也会相应地增加该农作物。 2、修改CropStandard的参数 Assets -> Prefabs -> Crop下的CropStandard,修改其Box Collider 2D的Size(Y…...
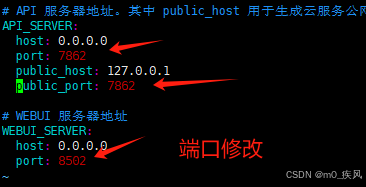
langchain—chatchat
署部 下载项目 git clone --recursive https://github.com/chatchat-space/Langchain-Chatchat.git 进入目录 cd Langchain-Chatchat anaconda环境准备 创建python环境 conda create -n langchain_env python3.10 -y 激活环境 conda activate langchain_env 验证pyhton环境…...
 % mod,保证mod是质数)
经典算法 求C(N, K) % mod,保证mod是质数
求C(N, K) % mod,保证mod是质数 问题描述 给你三个整数N,K,mod保证mod是一个质数,求组合数C(N, K) % mod。 输入描述 输入有多组,输入第一行为两个整数T,mod。接下来2 - T 1行,每行输入N, K。 输出描…...

【LeetCode 热题 100】二叉树的最大深度 / 翻转二叉树 / 二叉树的直径 / 验证二叉搜索树
⭐️个人主页:小羊 ⭐️所属专栏:LeetCode 热题 100 很荣幸您能阅读我的文章,诚请评论指点,欢迎欢迎 ~ 目录 二叉树的中序遍历二叉树的最大深度翻转二叉树对称二叉树二叉树的直径二叉树的层序遍历将有序数组转换为二叉搜索树验…...
关于软件测试开发的一些有趣的知识
文章目录 一、什么是测试?二、为什么要软件测试软件测试三、测试的岗位有哪些四 、软件测试和开发的区别五、走测试岗位为什么还要学开发。4、优秀的测试人员具备的素质我为什么走测试岗位 一、什么是测试? 其实这个问题说简单也不简单,说难…...
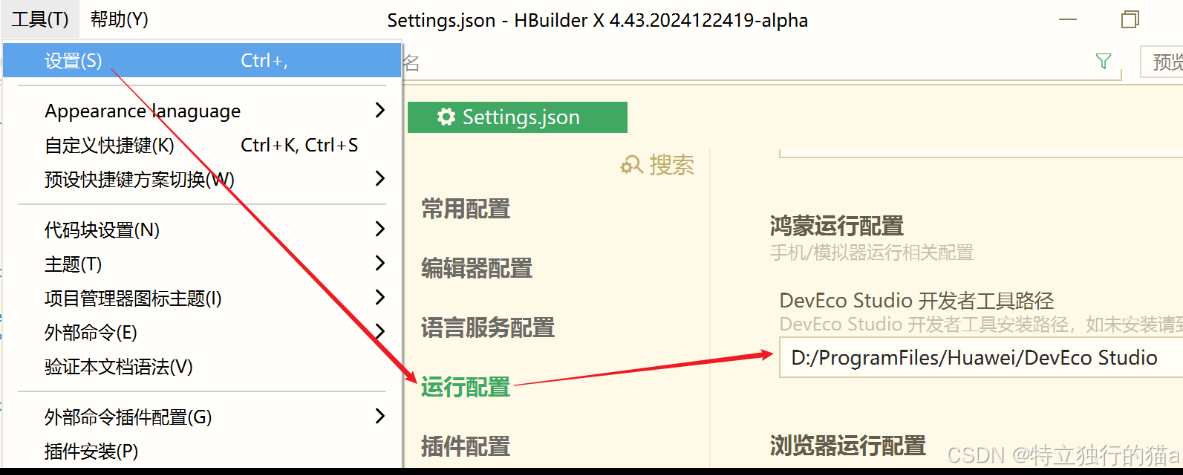
uni-app 开发HarmonyOS的鸿蒙影视项目分享:从实战案例到开源后台
最近,HBuilderX 新版本发布,带来了令人兴奋的消息——uni-app 现在支持 Harmony Next 平台的 App 开发。这对于开发者来说无疑是一个巨大的福音,意味着使用熟悉的 Vue 3 语法和开发框架,就可以为鸿蒙生态贡献自己的力量。 前言 作…...
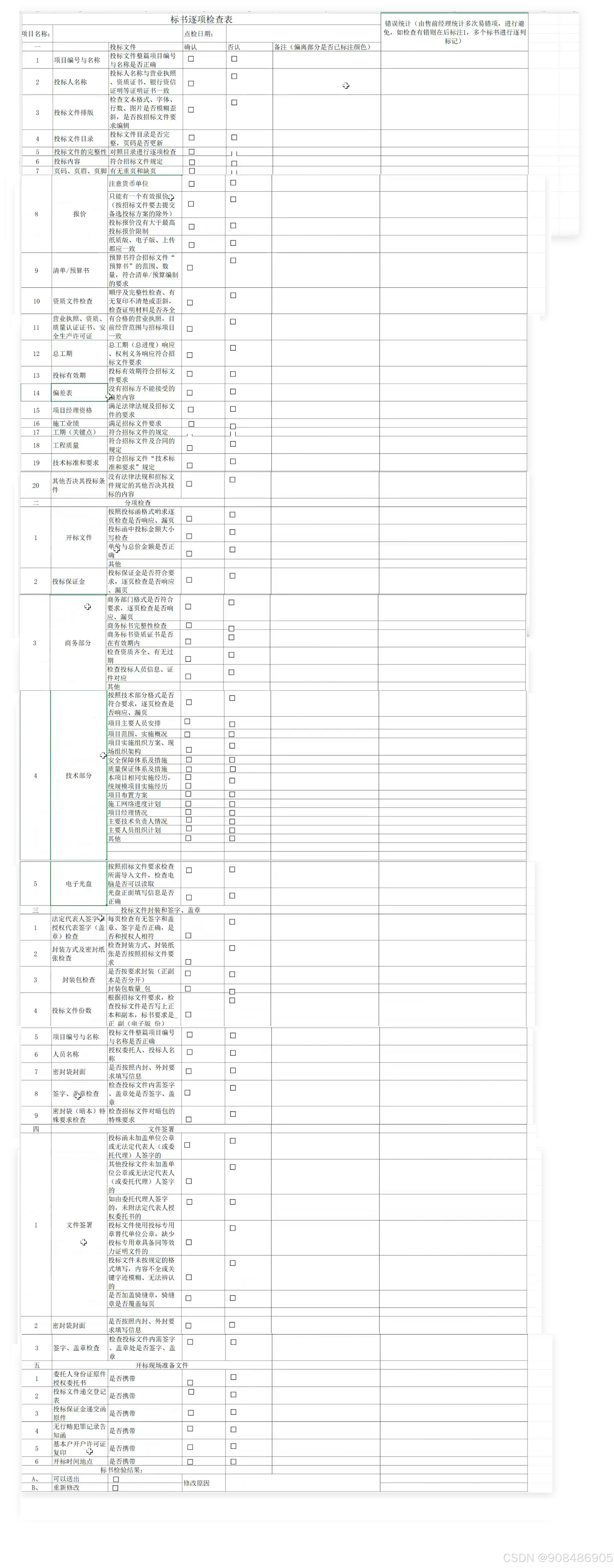
售前工作.工作流程和工具
第一部分 售前解决方案及技术建议书的制作 售前解决方案编写的标准操作步骤SOP: 售前解决方案写作方法_哔哩哔哩_bilibili 第二部分 投标过程关键活动--商务标技术方案 1. 按项目管理--售前销售项目立项 销售活动和销售线索的跟踪流程和工具 1)拿到标书ÿ…...
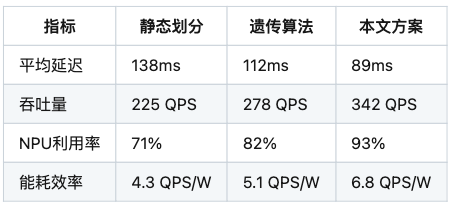
GPU与NPU异构计算任务划分算法研究:基于强化学习的Transformer负载均衡实践
点击 “AladdinEdu,同学们用得起的【H卡】算力平台”,H卡级别算力,按量计费,灵活弹性,顶级配置,学生专属优惠。 引言 在边缘计算与AI推理场景中,GPU-NPU异构计算架构已成为突破算力瓶颈的关键技…...

学习ai课程大纲
以下是一个通用的 AI 课程大纲,涵盖从基础到进阶的核心内容,适用于大学课程或自学规划。你可以根据自身需求(如入门、进阶、专项方向)调整内容和深度。 人工智能(AI)课程大纲 第一部分:基础理论…...

基于CentOS7制作OpenSSL 1.1的RPM包
背景:CentOS7 已经不再维护了,有时候需要升级某些组件,网上却没有相关的资源了。尤其是制作OpenSSH 9.6 的RPM包,就会要求OpenSSL为1.1的版本。基于此,还是自己制作吧,以下是踩坑过程。 1、官网提供的源码包…...

数据分析_Python
1 分析内容 1.1 数据的整体概述 提供数据集的基本信息,包括数据量、时间跨度、地理范围和主要字段. import pandas as pd# 创建示例数据 data {姓名: [张三, 李四, 王五, 赵六, 钱七, 孙八, 周九, 吴十],年龄: [25, 30, 35, 40, 45, 50, 55, 60],性别: [男, 男, 女, 女, 男,…...

TCP/UDP协议原理和区别 笔记
从简单到难吧 区别就是TCP一般用于安全稳定的需求,UDP一般用于不那么需要完全数据的需求,比如说直播,视频等。 再然后就是TPC性能慢于UDP。 再然后我们看TCP的原理(三次握手,数据传输,四次挥手࿰…...

深入浅出:C++数据处理类与计算机网络的巧妙类比
深入浅出:C数据处理类与计算机网络的巧妙类比 引言 在计算机编程中,我们常常会遇到一些看似简单的代码结构,却能巧妙地映射到复杂的计算机网络概念中。本文将通过一个简单的C数据处理类,探讨其与计算机网络中硬件设备和协议的类…...

【滑动窗口】LeetCode 209题解 | 长度最小的子数组
长度最小的子数组 前言:滑动窗口一、题目链接二、题目三、算法原理解法一:暴力枚举解法二:利用单调性,用滑动窗口解决问题那么怎么用滑动窗口解决问题?分析滑动窗口的时间复杂度 四、编写代码 前言:滑动窗口…...

在RK3588上使用NCNN和Vulkan加速ResNet50推理全流程
在RK3588上使用NCNN和Vulkan加速ResNet50推理全流程 前言:为什么需要关注移动端AI推理一、环境准备与框架编译1.1 获取NCNN源码1.2 安装必要依赖1.3 编译NCNN二、模型导出与转换2.1 生成ONNX模型2.2 转换NCNN格式三、模型量化加速3.1 生成校准数据3.2 执行量化操作四、性能测试…...

【ant design】ant-design-vue 4.0实现主题色切换
官网:Ant Design Vue — An enterprise-class UI components based on Ant Design and Vue.js 我图方便,直接在 app.vue 中加入的 <div class"app-content" v-bind:class"appOption.appContentClass"><a-config-provider…...

Android 图片自动拉伸不变形,点九
要让 UI 设计师 制作 Android 用的点九图(.9.png),可以按照以下流程和要求进行: 🧩 一、什么是点九图? 点九图(NinePatch)是一种特殊的 PNG 图像,用于在 Android 中根据…...

电子电路:什么是色环电阻器,怎么识别和计算阻值?
识别和计算色环电阻的阻值需要掌握颜色编码规则和基本步骤。以下是具体方法及窍门: 一、色环电阻的基本规则 色环数量: 4环电阻:前2环为有效数字,第3环为倍乘(10ⁿ),第4环为误差。5环电阻:前3环为有效数字,第4环为倍乘,第5环为误差。6环电阻(较少见):前3环为有效数…...

LeetCode Hot100刷题——轮转数组
56. 轮转数组 给定一个整数数组 nums,将数组中的元素向右轮转 k 个位置,其中 k 是非负数。 示例 1: 输入: nums [1,2,3,4,5,6,7], k 3 输出: [5,6,7,1,2,3,4] 解释: 向右轮转 1 步: [7,1,2,3,4,5,6] 向右轮转 2 步: [6,7,1,2,3,4,5] 向右轮转 3 步: …...
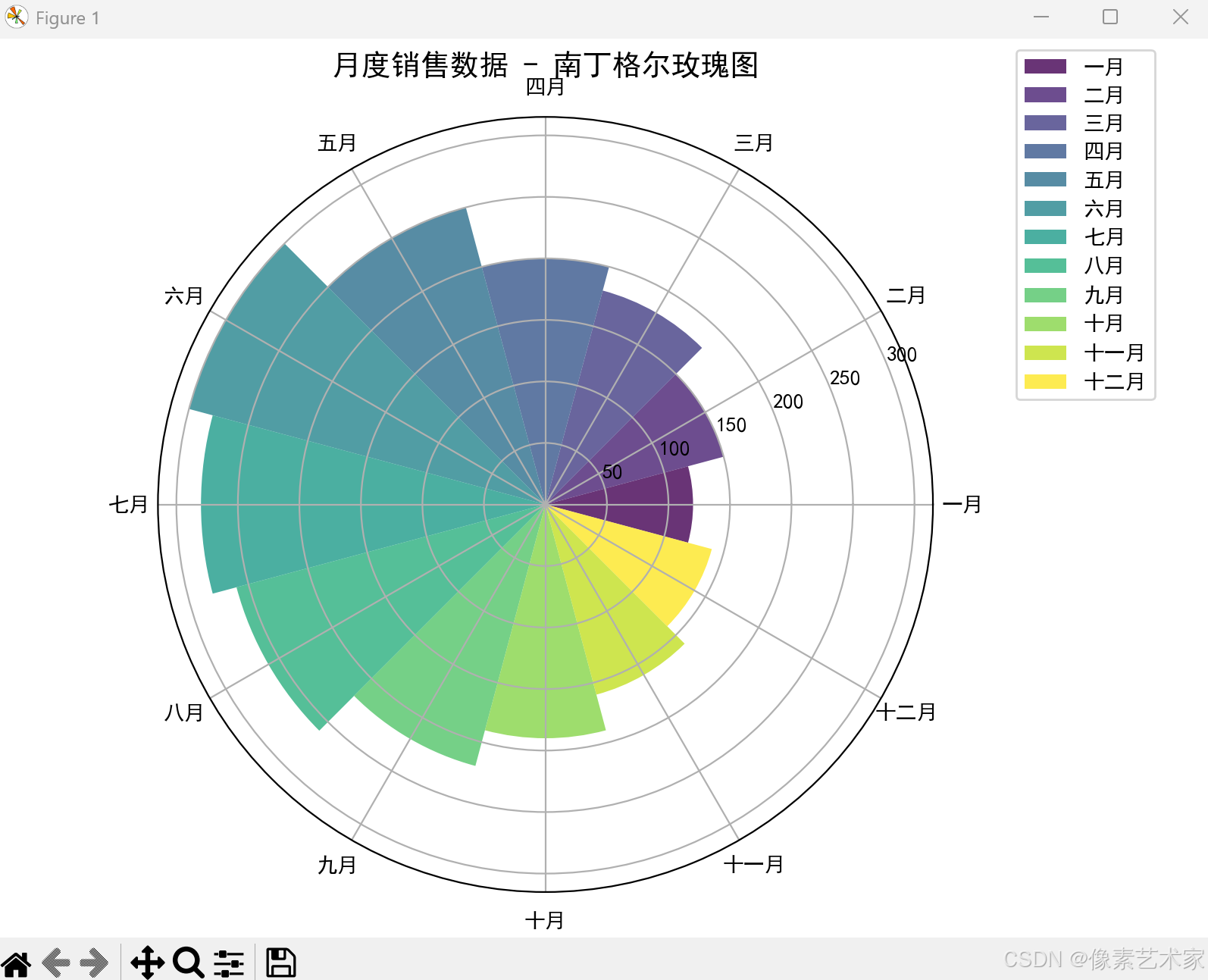
Python绘制南丁格尔玫瑰图:从入门到实战
Python绘制南丁格尔玫瑰图:从入门到实战 引言 南丁格尔玫瑰图(Nightingale Rose Chart),也被称为极区图(Polar Area Chart),是一种独特的数据可视化方式。这种图表由弗洛伦斯南丁格尔ÿ…...

概率与期望总结
一、概率 概念:无需多言;几个公式( Ω \Omega Ω 表示整个样本空间): 以下公式均有 A , B ⊆ Ω , 且 P ( A ) , P ( B ) > 0. P ( A ∪ B ) P ( A ) P ( B ) − P ( A ∩ B ) , P ( A ∣ B ) P ( A B ) P ( B…...
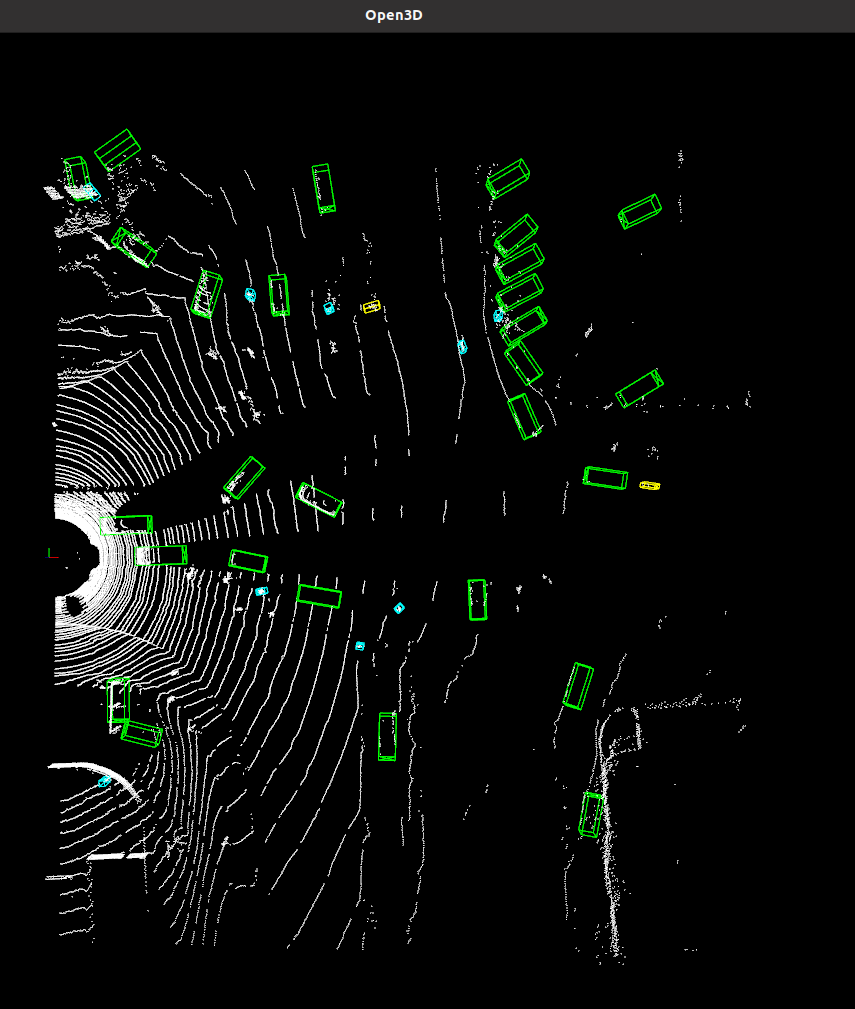
炼丹学习笔记3---ubuntu2004部署运行openpcdet记录
前言 环境 cuda 11.3 python 3.8 ubuntu2004 一、cuda环境检测 ylhy:~/code_ws/OpenPCDet/tools$ nvcc -V nvcc: NVIDIA (R) Cuda compiler driver Copyright (c) 2005-2021 NVIDIA Corporation Built on Sun_Mar_21_19:15:46_PDT_2021 Cuda compilation tools, release 11.3…...