VILT模型阅读笔记
代码地址:VILT
Abstract
Vision-and-Language Pre-training (VLP) has improved performance on various joint vision-andlanguage downstream tasks. Current approaches to VLP heavily rely on image feature extraction processes, most of which involve region supervision (e.g., object detection) and the convolutional architecture (e.g., ResNet). Although disregarded in the literature, we find it problematic in terms of both (1) efficiency/speed, that simply extracting input features requires much more computation than the multimodal interaction steps; and (2) expressive power, as it is upper bounded to the expressive power of the visual embedder and its predefined visual vocabulary. In this paper, we present a minimal VLP model, Vision-and-Language Transformer (ViLT), monolithic in the sense that the processing of visual inputs is drastically simplified to just the same convolution-free manner that we process textual inputs. We show that ViLT is up to tens of times faster than previous VLP models, yet with competitive or better downstream task performance.
视觉-语言预训练(VLP)技术已在多种跨模态下游任务中展现出显著性能提升。当前主流的VLP方法高度依赖图像特征提取流程,其中普遍采用区域监督机制(例如目标检测)和卷积架构(例如ResNet)。尽管文献尚未对此进行深入探讨,但我们发现该范式存在两个根本性问题:其一从效率维度来看,输入特征提取环节的计算量远超多模态交互步骤的计算需求;其二就表达能力而言,其性能上限受制于视觉编码器的表达能力和预定义视觉词表的表征范围。针对上述局限,本文提出一种极简的VLP模型——视觉-语言Transformer(ViLT),其核心创新在于对视觉输入处理流程进行彻底重构,采用与文本输入完全一致的无卷积方式处理视觉信号。 实验表明,ViLT的推理速度较现有VLP模型提升高达数十倍,且在多项下游任务中展现出具有竞争力甚至更优的性能表现。
Introduction
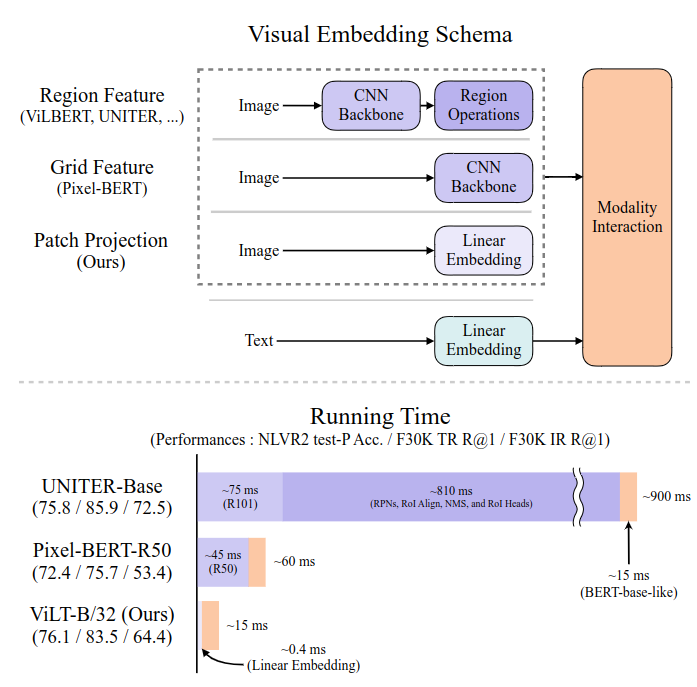
这是VILT中的第一张图,对比了三种方案:
- Region Feature (如ViLBERT、UNITER)
流程 :图像 → CNN Backbone(提取特征)→ Region Operations(区域操作,如目标检测中的ROI池化)。
特点 :依赖区域提议网络(如RPN)和复杂的后处理(如NMS),适用于需要显式区域信息的任务。 - Grid Feature (如Pixel-BERT)
流程 :图像 → CNN Backbone(直接输出网格特征)。
特点 :将图像划分为固定网格,丢弃位置信息,简化计算但可能损失细节。 - Patch Projection(本文方法)
流程 :图像 → Linear Embedding(线性投影,直接将图像块映射为嵌入向量)。
特点 :无需CNN或复杂后处理,通过简单线性变换高效生成视觉嵌入,显著降低计算量。
1. 传统VLP模型的局限性
- 计算瓶颈:现有VLP模型(如UNITER、Pixel-BERT)依赖复杂的视觉特征提取流程(如目标检测、CNN特征提取),导致训练和推理耗时显著增加(如图1中区域特征提取耗时达810ms,而Transformer交互仅需15ms)。这种设计在学术实验中常通过缓存特征规避问题,但实际应用中难以应对实时查询需求。
- 表达能力限制:基于预定义物体类别(如Visual Genome的1,600类)的区域特征存在语义覆盖盲区,且CNN的局部感受野难以捕捉长距离视觉依赖关系,限制了模型对复杂跨模态关系的建模能力。
2. ViLT的创新点与突破
- 无CNN的端到端处理:ViLT直接将图像划分为固定大小的块(patch),通过线性投影转换为向量后输入Transformer,与文本序列进行联合编码(如图1右半部分)。这一设计消除了传统CNN/RPN(区域提议网络)模块,使视觉嵌入(Visual Embed)的计算量从数百毫秒降至0.4ms,整体推理速度提升数十倍。
- 统一的模态交互框架:首次实现视觉和文本在Transformer中的同构处理,避免了多阶段流水线设计(如特征提取→融合→任务适配),增强了模型对齐跨模态语义的能力。
3. 当前研究背景下的技术关联
- Vision Transformer(ViT)的启发:ViLT借鉴了ViT(Dosovitskiy et al., 2020)中图像分块线性投影的思想,验证了Transformer在视觉领域对CNN的替代潜力。但ViT专注于单模态视觉任务,而ViLT将其扩展到跨模态场景,解决了图像-文本对齐的特殊挑战(如局部-全局语义匹配)。
- 多模态Transformer的演进:早期模型(如ViLBERT、LXMERT)采用双流架构分别处理视觉和文本,再通过跨注意力融合,导致参数冗余。ViLT通过单一流架构(如图2(d)中MI > VE=TE)实现更高效的模态交互,符合Transformer在NLP领域"越深越统一"的设计趋势。
4. 性能与效率的平衡机制
- 轻量化设计的实证有效性:尽管ViLT的视觉嵌入层参数仅为传统CNN的1/100(如ResNet-50约2,500万参数 vs. ViLT的线性投影层约20万参数),但其Transformer主干网络(如BERT-base规模)通过跨模态注意力机制弥补了浅层视觉编码的不足。实验显示,在NLVR2(76.1%)和Flickr30k(TR R@1 83.5%)等任务上,ViLT性能优于Pixel-BERT(72.4%/75.7%)和接近UNITER(75.8%/85.9%)。
- 数据增强与掩码策略的优化:首次引入整体词掩码(Whole Word Masking)和图像增强(如随机裁剪、颜色扰动),前者提升语言端的上下文理解,后者增强视觉特征的鲁棒性,共同推动下游任务性能提升(如Flickr30k IR R@1从Pixel-BERT的53.4%提升至64.4%)。
5. 研究意义与未来方向
- 理论层面:证明了区域监督和深度CNN非VLP的必要条件,为多模态学习提供新的范式。
- 工程应用:适合移动端/边缘设备部署(如实时图像检索、AR场景理解),解决传统模型因高算力需求导致的落地难题。
- 潜在挑战:
- 长尾视觉概念建模:缺乏显式物体检测可能影响对罕见类别(如特定型号汽车)的识别。
- 高分辨率处理成本:直接分块可能导致图像分辨率与计算量的线性增长,需权衡精度与效率(如ViLT-B/32使用32×32块大小)。
- 后续研究方向:
- 探索动态分块机制(如根据图像内容调整块大小)。
- 结合自监督预训练(如对比学习)进一步减少对大规模标注数据的依赖。
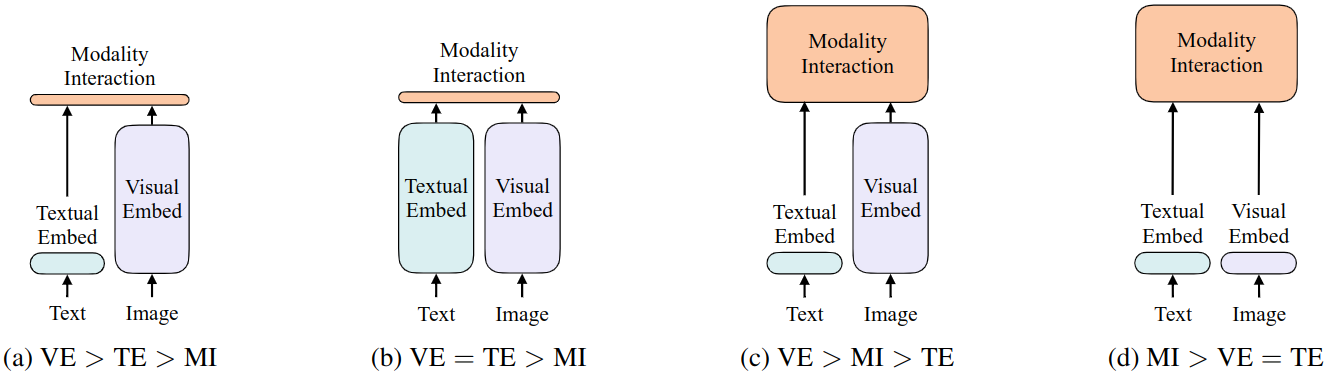
- 如图 2(a) 所示,属于是视觉模型占大部分算力,用简单的点积或浅注意层来表征两种模态中特征的相似性,代表模型是 VSE++
- 如图 2(b) 所示,属于是视觉模型和文本模型都使用较大算力,用简单的点积或浅注意层来表征两种模态中特征的相似性,代表模型是 CLIP。但是,这种方法对于视觉-语言下游任务性能很差,比如 CLIP 在 NLVR2 数据集上面性能较差,说明纵使单一模态的编码器很好,但是对其输出的简单融合可能也不足以学习复杂的视觉和语言任务,这可能就需要我们去研究更严格的跨模态交互方案了。
- 模型如图 2© 所示,属于是视觉模型占大部分算力,使用 Transformer 对图像和文本特征的交互进行建模,代表模型是 [FiLM](FiLM: Visual Reasoning with a General Conditioning Layer)和MoVie。
- 模型如图 2(d) 所示,属于是视觉模型和文本模型都极其简单,大部分计算力集中在模态的交互上面,使用 Transformer 对图像和文本特征的交互进行建模,代表模型是本文的 ViLT。
以下是对 ViLT 论文 3. Vision-and-Language Transformer 部分的详细解析,涵盖模型架构、预训练目标及关键技术细节:
Model Structure
3.1 Model Overview
核心设计:极简视觉嵌入 + 单流 Transformer
ViLT 是首个完全端到端的视觉-语言预训练(VLP)模型,其核心创新在于 极简的视觉嵌入流程 和 单流 Transformer 架构:
- 视觉嵌入(Visual Embedding)
- 输入处理:将图像 I ∈ R C × H × W I \in \mathbb{R}^{C \times H \times W} I∈RC×H×W 切分为 N = H W / P 2 N = HW/P^2 N=HW/P2 个块(patch),每个块展平为 R P 2 ⋅ C \mathbb{R}^{P^2 \cdot C} RP2⋅C,再通过线性投影 V ∈ R ( P 2 ⋅ C ) × H V \in \mathbb{R}^{(P^2 \cdot C) \times H} V∈R(P2⋅C)×H 映射为嵌入向量 v ˉ ∈ R N × H \bar{v} \in \mathbb{R}^{N \times H} vˉ∈RN×H。
- 位置编码:添加可学习的位置编码 V pos ∈ R ( N + 1 ) × H V_{\text{pos}} \in \mathbb{R}^{(N+1) \times H} Vpos∈R(N+1)×H,其中 N + 1 N+1 N+1 包含一个用于分类的
[CLS]token( v class v_{\text{class}} vclass)。 - 对比传统方法:无需 CNN 或区域特征提取(如 Faster R-CNN),直接通过线性投影生成视觉嵌入,显著降低计算成本。
参考了底层源码和claude4给出的设计,大致过程如下:
import torch
import torch.nn as nn
from transformers import BertConfigclass ViltImageEmbeddings(nn.Module):"""VILT的图像嵌入层,将图像patch转换为嵌入向量"""def __init__(self, config):super().__init__()self.config = configself.image_size = config.image_sizeself.patch_size = config.patch_sizeself.num_patches = (self.image_size // self.patch_size) ** 2# 图像patch嵌入self.patch_embeddings = nn.Conv2d( #这里虽然使用了Cov2d,但是本质上还是一个线性划分的效果,并没有进行卷积计算和CNN中的backbone各种激活函数的过程。in_channels=3,out_channels=config.hidden_size,kernel_size=self.patch_size,stride=self.patch_size)# 位置嵌入self.position_embeddings = nn.Parameter(torch.zeros(1, self.num_patches + 1, config.hidden_size))# CLS tokenself.cls_token = nn.Parameter(torch.zeros(1, 1, config.hidden_size))# 模态类型嵌入(区分图像和文本)self.token_type_embeddings = nn.Embedding(2, config.hidden_size)self.dropout = nn.Dropout(config.hidden_dropout_prob)def forward(self, pixel_values):batch_size = pixel_values.shape[0]# 将图像分割成patches并嵌入patch_embeddings = self.patch_embeddings(pixel_values) # (B, hidden_size, H/P, W/P)patch_embeddings = patch_embeddings.flatten(2).transpose(1, 2) # (B, num_patches, hidden_size)# 添加CLS tokencls_tokens = self.cls_token.expand(batch_size, -1, -1)embeddings = torch.cat([cls_tokens, patch_embeddings], dim=1)# 添加位置嵌入embeddings = embeddings + self.position_embeddings# 添加模态类型嵌入(图像模态为0)token_type_ids = torch.zeros(embeddings.shape[:2], dtype=torch.long, device=embeddings.device)embeddings = embeddings + self.token_type_embeddings(token_type_ids)embeddings = self.dropout(embeddings)return embeddings
- 文本嵌入(Text Embedding)
- 输入处理:文本 t ∈ R L × ∣ V ∣ t \in \mathbb{R}^{L \times |V|} t∈RL×∣V∣ 通过词嵌入矩阵 T ∈ R ∣ V ∣ × H T \in \mathbb{R}^{|V| \times H} T∈R∣V∣×H 和位置编码 T pos ∈ R ( L + 1 ) × H T_{\text{pos}} \in \mathbb{R}^{(L+1) \times H} Tpos∈R(L+1)×H 映射为 t ˉ ∈ R L × H \bar{t} \in \mathbb{R}^{L \times H} tˉ∈RL×H。
- 模态类型编码:文本和视觉嵌入分别与模态类型向量 t type , v type ∈ R H t_{\text{type}}, v_{\text{type}} \in \mathbb{R}^H ttype,vtype∈RH 相加,以区分模态来源
class ViltTextEmbeddings(nn.Module):"""VILT的文本嵌入层,处理文本token"""def __init__(self, config):super().__init__()self.word_embeddings = nn.Embedding(config.vocab_size, config.hidden_size, padding_idx=config.pad_token_id)self.position_embeddings = nn.Embedding(config.max_position_embeddings, config.hidden_size)self.token_type_embeddings = nn.Embedding(2, config.hidden_size)self.LayerNorm = nn.LayerNorm(config.hidden_size, eps=config.layer_norm_eps)self.dropout = nn.Dropout(config.hidden_dropout_prob)def forward(self, input_ids, position_ids=None):seq_length = input_ids.size(1)if position_ids is None:position_ids = torch.arange(seq_length, dtype=torch.long, device=input_ids.device)position_ids = position_ids.unsqueeze(0).expand_as(input_ids)# 词嵌入words_embeddings = self.word_embeddings(input_ids)# 位置嵌入position_embeddings = self.position_embeddings(position_ids)# 模态类型嵌入(文本模态为1)token_type_ids = torch.ones_like(input_ids)token_type_embeddings = self.token_type_embeddings(token_type_ids)embeddings = words_embeddings + position_embeddings + token_type_embeddingsembeddings = self.LayerNorm(embeddings)embeddings = self.dropout(embeddings)return embeddings
- 单流 Transformer 交互
- 输入序列:拼接文本和视觉嵌入 z 0 = [ t ˉ + t type ; v ˉ + v type ] z_0 = [\bar{t} + t_{\text{type}}; \bar{v} + v_{\text{type}}] z0=[tˉ+ttype;vˉ+vtype]。
- Transformer 层:通过 D D D 层 Transformer 块更新上下文表示:
z ^ d = MSA ( LN ( z d − 1 ) ) + z d − 1 , d = 1... D (4) z d = MLP ( LN ( z ^ d ) ) + z ^ d , d = 1... D (5) \begin{aligned} \hat{z}_d = \text{MSA}(\text{LN}(z_{d-1})) + z_{d-1}, \quad d = 1...D \quad \text{(4)} \\ z_d = \text{MLP}(\text{LN}(\hat{z}_d)) + \hat{z}_d, \quad d = 1...D \quad \text{(5)} \end{aligned} z^d=MSA(LN(zd−1))+zd−1,d=1...D(4)zd=MLP(LN(z^d))+z^d,d=1...D(5)- Pre-norm vs. Post-norm:ViT 使用 Pre-norm(层归一化在 MSA/MLP 前),而 BERT 使用 Post-norm(层归一化在 MSA/MLP 后)。
- 池化表示:取最终输出 $ z_D $ 的第一个 token(对应
[CLS])并通过线性投影 W pool W_{\text{pool}} Wpool 和tanh激活得到多模态表示 p p p:
p = tanh ( z D 0 W pool ) (6) p = \tanh(z_D^0 W_{\text{pool}}) \quad \text{(6)} p=tanh(zD0Wpool)(6)
大致代码如下:
class ViltMultimodalFusion(nn.Module):"""VILT的核心:多模态融合层使用共享的Transformer来处理图像和文本"""def __init__(self, config):super().__init__()self.config = config# 图像和文本嵌入层self.image_embeddings = ViltImageEmbeddings(config)self.text_embeddings = ViltTextEmbeddings(config)# 共享的Transformer编码器self.encoder = ViltEncoder(config)def forward(self, pixel_values, input_ids, attention_mask=None):# 获取图像嵌入image_embeds = self.image_embeddings(pixel_values)# 获取文本嵌入text_embeds = self.text_embeddings(input_ids)# 拼接图像和文本嵌入multimodal_embeds = torch.cat([image_embeds, text_embeds], dim=1)# 创建注意力掩码if attention_mask is not None:# 为图像部分创建全1的掩码image_mask = torch.ones(image_embeds.shape[:2], dtype=torch.long, device=image_embeds.device)extended_attention_mask = torch.cat([image_mask, attention_mask], dim=1)else:extended_attention_mask = None# 通过共享Transformer编码器encoder_outputs = self.encoder(multimodal_embeds,attention_mask=extended_attention_mask)return encoder_outputs- 模型参数
- 基于预训练的 ViT-B/32(ImageNet 分类任务),具体参数:
- 隐藏维度 H = 768 H = 768 H=768
- Transformer 层数 D = 12 D = 12 D=12
- Patch 大小 P = 32 P = 32 P=32
- MLP 隐藏层大小 = 3072
- 注意力头数 = 12
- 基于预训练的 ViT-B/32(ImageNet 分类任务),具体参数:
3.2 Pre-training Objectives
ViLT 通过两个目标联合训练:
- 图像-文本匹配(Image Text Matching, ITM)
- 任务定义:判断输入的图像和文本是否匹配。
- 实现:
- 50% 概率替换对齐的图像为负样本。
- 使用单层线性分类器(ITM Head)对池化表示 p p p 分类(二分类:匹配/不匹配)。
- 损失函数:负对数似然损失(Negative Log-Likelihood Loss)。
class ITMLoss(nn.Module):"""图像-文本匹配损失"""def __init__(self, config):super().__init__()self.itm_head = nn.Linear(config.hidden_size, 2) # 二分类:匹配/不匹配self.loss_fct = nn.CrossEntropyLoss()def forward(self, pooled_output, labels):"""Args:pooled_output: [CLS] token的池化表示 (batch_size, hidden_size)labels: 0表示不匹配,1表示匹配 (batch_size,)"""# 通过线性分类器得到logitsitm_logits = self.itm_head(pooled_output) # (batch_size, 2)# 计算交叉熵损失itm_loss = self.loss_fct(itm_logits, labels)return itm_loss, itm_logits
def create_negative_samples(images, texts, negative_ratio=0.5):"""创建负样本"""batch_size = images.size(0)labels = torch.ones(batch_size, dtype=torch.long) # 初始都是正样本# 随机选择一半样本作为负样本num_negatives = int(batch_size * negative_ratio)negative_indices = torch.randperm(batch_size)[:num_negatives]# 对选中的样本,随机替换图像for idx in negative_indices:# 随机选择一个不同的图像random_img_idx = torch.randint(0, batch_size, (1,)).item()while random_img_idx == idx:random_img_idx = torch.randint(0, batch_size, (1,)).item()images[idx] = images[random_img_idx]labels[idx] = 0 # 标记为负样本return images, texts, labels```
2. **掩码语言建模(Masked Language Modeling, MLM)** - **任务定义**:预测被掩码的文本 token。 - **实现**: - 15% 概率随机掩码文本 token(遵循 BERT 的启发式策略)。 - 使用两层 MLP 分类器(MLM Head)对掩码位置的上下文表示 $z_D^{\text{masked}|t}$ 预测词汇表概率。 - 损失函数:掩码 token 的负对数似然损失。 大致代码如下:```python
class MLMLoss(nn.Module):"""掩码语言建模损失"""def __init__(self, config):super().__init__()# 两层MLP分类器self.mlm_head = nn.Sequential(nn.Linear(config.hidden_size, config.hidden_size),nn.GELU(),nn.LayerNorm(config.hidden_size),nn.Linear(config.hidden_size, config.vocab_size))self.loss_fct = nn.CrossEntropyLoss(ignore_index=-100)def forward(self, sequence_output, masked_lm_labels):"""Args:sequence_output: Transformer输出 (batch_size, seq_len, hidden_size)masked_lm_labels: 掩码标签,-100表示非掩码位置 (batch_size, seq_len)"""# 只对掩码位置计算损失masked_indices = (masked_lm_labels != -100)if masked_indices.sum() == 0:return torch.tensor(0.0, device=sequence_output.device)# 获取掩码位置的表示masked_output = sequence_output[masked_indices] # (num_masked, hidden_size)# 通过MLM头预测词汇表概率prediction_scores = self.mlm_head(masked_output) # (num_masked, vocab_size)# 获取真实标签masked_labels = masked_lm_labels[masked_indices] # (num_masked,)# 计算交叉熵损失mlm_loss = self.loss_fct(prediction_scores, masked_labels)return mlm_loss, prediction_scoresdef mask_tokens(input_ids, tokenizer, mlm_probability=0.15):"""按照BERT策略掩码tokens- 80%的时间替换为[MASK]- 10%的时间替换为随机token- 10%的时间保持不变"""labels = input_ids.clone()# 创建掩码概率矩阵probability_matrix = torch.full(labels.shape, mlm_probability)special_tokens_mask = [tokenizer.get_special_tokens_mask(val, already_has_special_tokens=True) for val in labels.tolist()]probability_matrix.masked_fill_(torch.tensor(special_tokens_mask, dtype=torch.bool), value=0.0)# 确定哪些token被掩码masked_indices = torch.bernoulli(probability_matrix).bool()labels[~masked_indices] = -100 # 非掩码位置标记为-100# 80%的时间替换为[MASK]indices_replaced = torch.bernoulli(torch.full(labels.shape, 0.8)).bool() & masked_indicesinput_ids[indices_replaced] = tokenizer.convert_tokens_to_ids(tokenizer.mask_token)# 10%的时间替换为随机tokenindices_random = torch.bernoulli(torch.full(labels.shape, 0.5)).bool() & masked_indices & ~indices_replacedrandom_words = torch.randint(len(tokenizer), labels.shape, dtype=torch.long)input_ids[indices_random] = random_words[indices_random]# 剩余10%保持不变return input_ids, labels
- 词-块对齐(Word-Patch Alignment, WPA)
- 动机:增强细粒度跨模态对齐,解决传统区域特征缺失的问题。
- 实现:
- 计算文本子集 z D ∣ t z_D|t zD∣t 和视觉子集 z D ∣ v z_D|v zD∣v 的对齐得分,使用 IPOT 算法(近似最优传输)计算 Wasserstein 距离。
- 超参数设置: β = 0.5 \beta = 0.5 β=0.5, N = 50 N = 50 N=50(参考 Chen et al., 2019)。
- 损失函数:将 IPOT 计算的近似 Wasserstein 距离乘以 0.1 后加入 ITM 损失。
大致代码如下:
class WPALoss(nn.Module):"""词-块对齐损失,使用IPOT算法计算最优传输距离"""def __init__(self, config):super().__init__()self.beta = 0.5 # IPOT算法参数self.max_iter = 50 # 最大迭代次数self.weight = 0.1 # WPA损失权重def forward(self, text_features, visual_features):"""Args:text_features: 文本特征 (batch_size, text_len, hidden_size)visual_features: 视觉特征 (batch_size, patch_len, hidden_size)"""batch_size = text_features.size(0)total_loss = 0.0for i in range(batch_size):# 获取单个样本的特征text_feat = text_features[i] # (text_len, hidden_size)visual_feat = visual_features[i] # (patch_len, hidden_size)# 计算成本矩阵(余弦距离)cost_matrix = self.compute_cost_matrix(text_feat, visual_feat)# 使用IPOT算法计算近似Wasserstein距离wpa_loss = self.ipot_distance(cost_matrix)total_loss += wpa_lossreturn total_loss / batch_size * self.weightdef compute_cost_matrix(self, text_feat, visual_feat):"""计算文本和视觉特征之间的成本矩阵"""# L2归一化text_feat = F.normalize(text_feat, p=2, dim=-1)visual_feat = F.normalize(visual_feat, p=2, dim=-1)# 计算余弦距离矩阵similarity = torch.mm(text_feat, visual_feat.t()) # (text_len, patch_len)cost_matrix = 1.0 - similarity # 转换为距离return cost_matrixdef ipot_distance(self, cost_matrix):"""IPOT算法计算近似最优传输距离参考: Chen et al., 2019"""m, n = cost_matrix.shape# 初始化传输计划T = torch.ones(m, n, device=cost_matrix.device) / (m * n)# 边际分布(均匀分布)mu = torch.ones(m, device=cost_matrix.device) / mnu = torch.ones(n, device=cost_matrix.device) / n# IPOT迭代for _ in range(self.max_iter):# 更新行Q = torch.exp(-cost_matrix / self.beta)T = T * Q# 行归一化row_sum = T.sum(dim=1, keepdim=True)T = T / (row_sum + 1e-8) * mu.unsqueeze(1)# 列归一化col_sum = T.sum(dim=0, keepdim=True)T = T / (col_sum + 1e-8) * nu.unsqueeze(0)# 计算最优传输距离distance = torch.sum(T * cost_matrix)return distancedef sinkhorn_algorithm(cost_matrix, mu, nu, reg=0.1, max_iter=100):"""Sinkhorn算法的替代实现(更稳定)"""m, n = cost_matrix.shape# 初始化对偶变量u = torch.zeros(m, device=cost_matrix.device)v = torch.zeros(n, device=cost_matrix.device)# Sinkhorn迭代for _ in range(max_iter):u_prev = u.clone()# 更新uu = reg * (torch.log(mu + 1e-8) - torch.logsumexp(-cost_matrix / reg + v.unsqueeze(0), dim=1))# 更新vv = reg * (torch.log(nu + 1e-8) - torch.logsumexp(-cost_matrix / reg + u.unsqueeze(1), dim=0))# 检查收敛if torch.norm(u - u_prev) < 1e-6:break# 计算传输计划T = torch.exp((-cost_matrix + u.unsqueeze(1) + v.unsqueeze(0)) / reg)# 计算距离distance = torch.sum(T * cost_matrix)return distance3.3 Whole Word Masking
- 目的:提升模型利用跨模态信息的能力。
- 实现:
- 掩码整个单词的所有子词(如 “giraffe” 的子词 [“gi”, “##raf”, “##fe”] 全部掩码),避免模型依赖局部语言信息。
- 掩码概率:15%。
- 效果:迫使模型必须结合图像信息才能恢复完整单词,增强多模态协同能力。
3.4 Image Augmentation
- 动机:提升视觉嵌入的泛化能力。
- 实现:
- 使用 RandAugment(Cubuk et al., 2020),但去除以下两种操作:
- 颜色反转:文本可能包含颜色信息。
- Cutout:可能遮挡图像中的小物体。
- 超参数: N = 2 N = 2 N=2(增强策略数量), M = 9 M = 9 M=9(增强强度)。
- 使用 RandAugment(Cubuk et al., 2020),但去除以下两种操作:
- 对比传统方法:
- 区域特征模型(如 Faster R-CNN)无法灵活应用数据增强。
- ViLT 的线性嵌入支持端到端增强,提升训练效果。
总结:ViLT 的创新点
- 极简视觉嵌入:用线性投影替代 CNN,推理速度达 15 ms。
- 单流 Transformer:统一处理多模态信息,减少冗余计算。
- 跨模态对齐增强:WPA 损失 + Whole Word Masking 提升细粒度交互能力。
- 端到端增强:支持图像数据增强,提升泛化性能。
ViLT 通过简化视觉嵌入流程,在保持高性能的同时显著降低了计算成本,为轻量级视觉-语言模型提供了新范式。
相关文章:
VILT模型阅读笔记
代码地址:VILT Abstract Vision-and-Language Pre-training (VLP) has improved performance on various joint vision-andlanguage downstream tasks. Current approaches to VLP heavily rely on image feature extraction processes, most of which involve re…...

掌握 npm 核心操作:从安装到管理依赖的完整指南
图为开发者正在终端操作npm命令,图片来源:Unsplash 作为 Node.js 生态的基石,npm(Node Package Manager)是每位开发者必须精通的工具。每天有超过 1700 万个项目通过 npm 共享代码,其重要性不言而喻。本文…...

OpenCV CUDA模块特征检测与描述------一种基于快速特征点检测和旋转不变的二进制描述符类cv::cuda::ORB
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 cv::cuda::ORB 是 OpenCV 库中 CUDA 模块的一部分,它提供了一种基于快速特征点检测和旋转不变的二进制描述符的方法,用于…...
Awesome ChatGPT Prompts:释放AI对话潜力的开源利器
项目概览 Awesome ChatGPT Prompts 是由土耳其开发者 Fatih Kadir Akın 发起的开源项目,托管于 GitHub,旨在通过精心设计的提示词模板(Prompts)优化用户与 ChatGPT 的交互体验。项目以 Markdown 和 CSV 格式管理模板,无需复杂编程语言,但需文本处理能力,目前已在 GitH…...

Prompt Tuning:轻量级微调与反向传播揭秘
Prompt Tuning 损失函数与反向传播原理解析 在Transformers中,Prompt Tuning是一种轻量级参数高效微调方法,其核心思想是只训练额外添加的提示词向量(prompt embeddings),而冻结预训练模型的主体参数。 损失函数设计 Prompt Tuning的损失函数与标准的语言模型训练类似,主…...
)
C++ 继承详解:基础篇(含代码示例)
目录 1. 什么是继承? 2. 继承的访问控制 3. 派生类构造与析构 (1) 构造顺序 (2) 析构顺序 4. 函数隐藏(Name Hiding) 1. 什么是继承? 继承(Inheritance)是面向对象编程(OOP)的…...

PP-YOLOE-SOD学习笔记2
一、解析X-Anylabeling标注后的json格式问题 最近在使用自动标注工具后json格式转化过程中,即标注框的四点坐标转换为两点坐标时,发现json格式的四点顺序是按顺时针方向开始的,那么在转换其实就是删除2、4坐标或者1、3坐标即可。 二、数据集…...

OpenLayers 加载测量控件
注:当前使用的是 ol 5.3.0 版本,天地图使用的key请到天地图官网申请,并替换为自己的key 地图控件是一些用来与地图进行简单交互的工具,地图库预先封装好,可以供开发者直接使用。OpenLayers具有大部分常用的控件&#x…...

.NET ORM开发手册:基于SqlSugar的高效数据访问全攻略
SqlSuger是一个国产,开源ORM框架,具有高性能,使用方便,功能全面的特点,支持.NET Framework和.NET Core,支持各种关系型数据库,分布式数据库,时序数据库。 官网地址:SqlS…...

【PostgreSQL】数据探查工具1.0研发可行性方案
👉 点击关注不迷路 👉 点击关注不迷路 👉 点击关注不迷路 想抢先解锁数据自由的宝子,速速戳我!评论区蹲一波 “蹲蹲”,揪人唠唠你的超实用需求! 【PostgreSQL】数据探查工具1.0研发可行性方案,数据调研之秒解析数据结构,告别熬夜写 SQL【PostgreSQL】数据探查工具…...

C++ 内存管理与单例模式剖析
目录 引言 一、堆上唯一对象:HeapOnly类 (一)设计思路 (二)代码实现 (三)使用示例及注意事项 二、栈上唯一对象:StackOnly类 (一)设计思路 ࿰…...

算法学习——从零实现循环神经网络
从零实现循环神经网络 一、任务背景二、数据读取与准备1. 词元化2. 构建词表 三、参数初始化与训练1. 参数初始化2. 模型训练 四、预测总结 一、任务背景 对于序列文本来说,如何通过输入的几个词来得到后面的词一直是大家关注的任务之一,即:…...
win10使用nginx做简单负载均衡测试
一、首先安装Nginx: 官网链接:https://nginx.org/en/download.html 下载完成后,在本地文件中解压。 解压完成之后,打开conf --> nginx.config 文件 1、在 http 里面加入以下代码 upstream GY{#Nginx是如何实现负载均衡的&a…...
2025电工杯数学建模B题思路数模AI提示词工程
我发布的智能体链接:数模AI扣子是新一代 AI 大模型智能体开发平台。整合了插件、长短期记忆、工作流、卡片等丰富能力,扣子能帮你低门槛、快速搭建个性化或具备商业价值的智能体,并发布到豆包、飞书等各个平台。https://www.coze.cn/search/n…...

软考软件评测师——软件工程之开发模型与方法
目录 一、核心概念 二、主流模型详解 (一)经典瀑布模型 (二)螺旋演进模型 (三)增量交付模型 (四)原型验证模型 (五)敏捷开发实践 三、模型选择指南 四…...

前端表单中 `readOnly` 和 `disabled` 属性的区别
前端表单中 readOnly 和 disabled 属性的区别 定义与适用范围 readOnly 是一种属性,仅适用于 <input> 和 <textarea> 元素。当设置了此属性时,用户无法修改这些元素的内容,但仍能聚焦并选中文本。disabled 则是一个更广泛的属性…...
【日志软件】hoo wintail 的替代
hoo wintail 的替代 主要问题是日志大了以后会卡有时候日志覆盖后,改变了,更新了,hoo wintail可能无法识别需要重新打开。 有很多类似的日志监控软件可以替代。以下是一些推荐的选项: 免费软件 BareTail 轻量级的实时日志查看…...
)
OceanBase数据库全面指南(基础入门篇)
文章目录 一、OceanBase 简介与安装配置指南1.1 OceanBase 核心特点1.2 架构解析1.3 安装部署实战1.3.1 硬件要求1.3.2 安装步骤详解1.3.3 配置验证二、OceanBase 基础 SQL 语法入门2.1 数据查询(SELECT)2.1.1 基础查询语法2.1.2 实际案例演示2.2 数据操作(INSERT/UPDATE/DE…...

异步处理与事件驱动中的模型调用链设计
异步处理与事件驱动中的模型调用链设计 在现代AI系统中,尤其是在引入了大模型(如LLM)或多步骤生成流程的业务场景中,传统的同步调用模型已越来越难以应对延迟波动、资源竞争和流程耦合等问题。为了提升系统响应效率、降低调用失败…...

redis配置带验证的主从复制
IP地址主机名192.168.10.161redis161192.168.10.162redis162192.168.10.163redis163 配置主机host161,redis服务连接密码为123456主机host162设置连接host61的redis服务密码 给host161主机的Redis服务设置连接密码,如果从服务器不指定连接密码无法同…...
Ollama-OCR:基于Ollama多模态大模型的端到端文档解析和处理
基本介绍 Ollama-OCR是一个Python的OCR解析库,结合了Ollama的模型能力,可以直接处理 PDF 文件无需额外转换,轻松从扫描版或原生 PDF 文档中提取文本和数据。根据使用的视觉模型和自定义提示词,Ollama-OCR 可支持多种语言…...

OpenCV CUDA 模块中图像过滤------创建一个拉普拉斯(Laplacian)滤波器函数createLaplacianFilter()
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 cv::cuda::createLaplacianFilter 是 OpenCV CUDA 模块中的一个函数,用于创建一个 拉普拉斯(Laplacian)滤波器…...
图论学习笔记 3
自认为写了很多,后面会出 仙人掌、最小树形图 学习笔记。 多图警告。 众所周知王老师有一句话: ⼀篇⽂章不宜过⻓,不然之后再修改使⽤的时候,在其中找想找的东⻄就有点麻烦了。当然⽂章也不宜过多,不然想要的⽂章也不…...

在单片机中如何在断电前将数据保存至DataFlash?
几年前,我做过一款智能插座,需要带电量计量的功能, 比如有个参数是总共用了多少度电 (kWh),这个是需要实时掉存保存的数据。 那问题来了,如果家里突然停电,要怎么在断电前将数据保存至Flash? 问…...
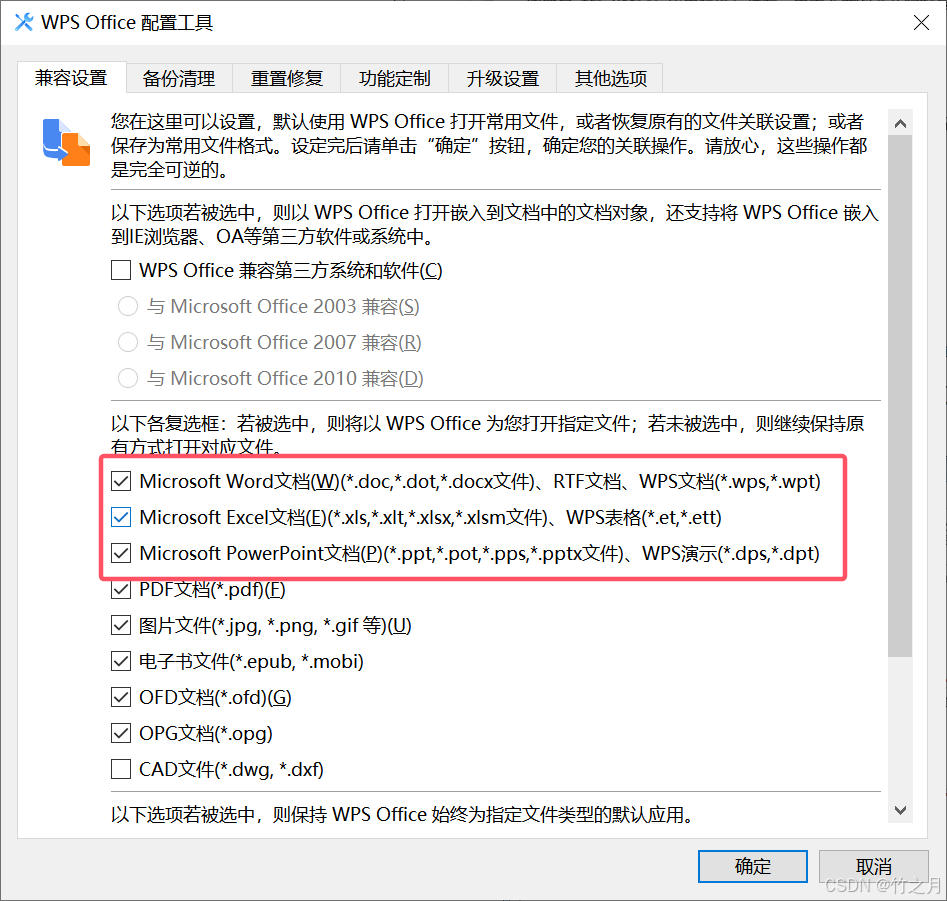
【将WPS设置为默认打开方式】--突然无法用WPS打开文件
1. 点击【开始】——【WPS Office】——【配置工具】; 2. 在出现的弹窗中,点击【高级】; 3. 在“兼容设置”中,将复选框勾上,点击【确定】。...
电子人的分水岭-FPGA模电和数电
为什么模电这么难学?一文带你透彻理解模电 ——FPGA是“前期数电,后期模电”的典型代表 在电子工程的世界里,有两门基础课程让无数学生“闻之色变”:数字电路(数电) 和 模拟电路(模电࿰…...

(6)python爬虫--selenium
文章目录 前言一、初识selenium二、安装selenium2.1 查看chrome版本并禁止chrome自动更新2.1.1 查看chrome版本2.1.2 禁止chrome更新自动更新 2.2 安装对应版本的驱动程序2.3安装selenium包 三、selenium关于浏览器的使用3.1 创建浏览器、设置、打开3.2 打开/关闭网页及浏览器3…...
Python之两个爬虫案例实战(澎湃新闻+网易每日简报):附源码+解释
目录 一、案例一:澎湃新闻时政爬取 (1)数据采集网站 (2)数据介绍 (3)数据采集方法 (4)数据采集过程 二、案例二:网易每日新闻简报爬取 (1&#x…...

HarmonyOS NEXT~鸿蒙系统与mPaaS三方框架集成指南
HarmonyOS NEXT~鸿蒙系统与mPaaS三方框架集成指南 1. 概述 1.1 鸿蒙系统简介 鸿蒙系统(HarmonyOS)是华为开发的分布式操作系统,具备以下核心特性: 分布式架构:支持跨设备无缝协同微内核设计:提高安全性和性能一次开…...

系统安全及应用学习笔记
系统安全及应用学习笔记 一、账号安全控制 (一)账户管理策略 冗余账户处理 非登录账户:Linux 系统中默认存在如 bin、daemon 等非登录账户,其登录 Shell 应为 /sbin/nologin,需定期检查确保未被篡改。冗余账户清理&…...