c/c++的opencv像素级操作二值化
图像级操作:使用 C/C++ 进行二值化
在数字图像处理中,图像级操作 (Image-Level Operations) 是指直接在图像的像素级别上进行处理,以改变图像的视觉特性或提取有用信息。这些操作通常不依赖于图像的全局结构,而是关注每个像素及其邻域。一个常见且基础的图像级操作是二值化 (Binarization)。
像素级操作是对图像处理的基础
什么是二值化? 🤔
二值化是将灰度图像转换为二值图像的过程。在二值图像中,每个像素只有两种可能的颜色值,通常是黑色和白色(或0和255)。这个过程通过选择一个阈值 (Threshold) 来实现。
- 如果像素的灰度值 大于 阈值,则将其设置为白色(例如255)。
- 如果像素的灰度值 小于或等于 阈值,则将其设置为黑色(例如0)。
二值化在许多图像处理应用中非常有用,例如:
- 对象分割:将感兴趣的对象与背景分离。
- 文本识别 (OCR):增强文本字符的对比度,使其更容易被识别。
- 特征提取:简化图像,以便更容易提取形状、轮廓等特征。
- 图像压缩:减少图像数据量。
如何选择阈值? 🎯
阈值的选择对二值化的结果至关重要。常见的阈值选择方法有:
- 全局阈值 (Global Thresholding):对整个图像使用单个固定的阈值。这种方法简单快捷,但在光照不均匀的图像中效果可能不佳。
- 自适应阈值 (Adaptive Thresholding):根据图像不同区域的局部特性计算不同的阈值。这种方法对于光照变化或背景复杂的图像更为有效。常见的自适应阈值算法有均值法和高斯法。
- Otsu 阈值法 (Otsu’s Method):一种自动确定最佳全局阈值的方法,它试图最大化类间方差(前景和背景之间的方差)。
使用 C/C++ 实现图像二值化 💻
我们将使用 OpenCV (Open Source Computer Vision Library) 这个强大的开源库来演示如何在 C/C++ 中进行图像二值化。OpenCV 提供了丰富的图像处理函数,使得操作更加便捷。
前提条件:
- 安装了 C++ 编译器 (如 GCC, MSVC)。
- 安装了 OpenCV 库并配置好了编译环境。
示例代码 (使用全局阈值):
#include <opencv2/opencv.hpp>
#include <iostream>int main(int argc, char** argv) {// 检查输入参数if (argc != 3) {std::cerr << "用法: " << argv[0] << " <输入图像路径> <输出图像路径>" << std::endl;return -1;}// 读取输入图像cv::Mat image = cv::imread(argv[1], cv::IMREAD_GRAYSCALE); // 以灰度模式读取if (image.empty()) {std::cerr << "错误: 无法加载图像 " << argv[1] << std::endl;return -1;}// 定义阈值double threshold_value = 128.0; // 可以根据需要调整double max_binary_value = 255.0;// 创建输出图像cv::Mat binary_image;// 进行二值化操作// cv::THRESH_BINARY: 如果 src(x,y) > thresh, dst(x,y) = maxval; 否则, dst(x,y) = 0.// cv::THRESH_BINARY_INV: 如果 src(x,y) > thresh, dst(x,y) = 0; 否则, dst(x,y) = maxval.cv::threshold(image, binary_image, threshold_value, max_binary_value, cv::THRESH_BINARY);// 保存输出图像if (!cv::imwrite(argv[2], binary_image)) {std::cerr << "错误: 无法保存图像 " << argv[2] << std::endl;return -1;}std::cout << "图像二值化完成!输出图像已保存至: " << argv[2] << std::endl;// (可选) 显示图像// cv::imshow("原始图像", image);// cv::imshow("二值化图像", binary_image);// cv::waitKey(0); // 等待按键return 0;
}
编译和运行 (以 GCC 和 Linux 为例):
假设你的 OpenCV 安装在标准路径下。
-
编译:
g++ -o binarize_image binarize_image.cpp `pkg-config --cflags --libs opencv4`(如果你的 OpenCV 版本不同,将
opencv4替换为你的版本,例如opencv) -
运行:
./binarize_image input.jpg output_binary.jpg确保
input.jpg存在于当前目录,或者提供完整路径。
代码解释:
#include <opencv2/opencv.hpp>: 包含了 OpenCV 的主要头文件。cv::imread(argv[1], cv::IMREAD_GRAYSCALE): 读取指定路径的图像。cv::IMREAD_GRAYSCALE参数确保图像以灰度格式加载,这对于二值化是必需的。cv::Mat image:cv::Mat是 OpenCV 中用于存储图像数据的核心类。double threshold_value = 128.0;: 设置一个固定的全局阈值。通常灰度值范围是 0-255,所以 128 是一个常见的中点。double max_binary_value = 255.0;: 设置二值化后的最大像素值(通常是白色)。cv::threshold(image, binary_image, threshold_value, max_binary_value, cv::THRESH_BINARY);: 这是执行二值化的核心函数。image: 输入的灰度图像。binary_image: 输出的二值图像。threshold_value: 设定的阈值。max_binary_value: 当像素值大于阈值时设置的值。cv::THRESH_BINARY: 二值化的类型。还有其他类型,如cv::THRESH_BINARY_INV(反向二值化),cv::THRESH_TRUNC,cv::THRESH_TOZERO,cv::THRESH_TOZERO_INV。
cv::imwrite(argv[2], binary_image): 将处理后的二值图像保存到指定路径。cv::imshow()和cv::waitKey(): (可选) 用于在窗口中显示原始图像和处理后的图像。
使用自适应阈值
对于光照不均的图像,自适应阈值通常效果更好。OpenCV 提供了 cv::adaptiveThreshold 函数。
示例代码片段 (自适应阈值):
#include <opencv2/opencv.hpp>
#include <iostream>int main(int argc, char** argv) {// ... (与前面相同的图像加载和参数检查代码) ...cv::Mat image = cv::imread(argv[1], cv::IMREAD_GRAYSCALE);if (image.empty()) { /* ... */ return -1; }cv::Mat adaptive_binary_image;double max_binary_value = 255.0;int block_size = 11; // 计算阈值的邻域大小,必须是奇数double C = 2; // 从均值或加权均值中减去的常数// cv::ADAPTIVE_THRESH_MEAN_C: 邻域均值减去 C 作为阈值// cv::ADAPTIVE_THRESH_GAUSSIAN_C: 邻域高斯加权和减去 C 作为阈值cv::adaptiveThreshold(image,adaptive_binary_image,max_binary_value,cv::ADAPTIVE_THRESH_MEAN_C, // 或 cv::ADAPTIVE_THRESH_GAUSSIAN_Ccv::THRESH_BINARY,block_size,C);if (!cv::imwrite(argv[2], adaptive_binary_image)) { /* ... */ return -1; }std::cout << "自适应二值化完成!输出图像已保存至: " << argv[2] << std::endl;return 0;
}
自适应阈值参数:
adaptiveMethod:cv::ADAPTIVE_THRESH_MEAN_C或cv::ADAPTIVE_THRESH_GAUSSIAN_C。thresholdType: 通常是cv::THRESH_BINARY或cv::THRESH_BINARY_INV。blockSize: 用于计算局部阈值的邻域大小。它必须是奇数。C: 一个常数,从计算出的均值或加权均值中减去。这个值可以帮助微调阈值。
不使用 OpenCV (纯 C/C++ 概念)
如果不依赖像 OpenCV 这样的库,你需要自己处理图像文件的读取(例如 BMP、JPEG、PNG 等格式,这本身就很复杂)和像素数据的操作。
以下是一个高度简化的伪代码概念,假设你已经有了一个二维数组表示的灰度图像像素数据 (unsigned char** pixels, int width, int height):
// 伪代码 - 假设像素数据已加载到 unsigned char** pixels
// pixels[row][col] 是 (0-255) 的灰度值void binarize_manual(unsigned char** pixels, int width, int height, unsigned char threshold) {for (int i = 0; i < height; ++i) {for (int j = 0; j < width; ++j) {if (pixels[i][j] > threshold) {pixels[i][j] = 255; // 白色} else {pixels[i][j] = 0; // 黑色}}}
}// 主要挑战在于如何从文件加载像素数据到 'pixels' 数组
// 以及如何将处理后的 'pixels' 数组保存回图像文件。
// 这通常需要解析图像文件头和像素数据,非常繁琐。
手动实现图像文件I/O的复杂性是使用 OpenCV 等库的主要原因之一。 这些库封装了文件格式的复杂性,并提供了优化的图像处理算法。
总结 ✨
图像二值化是一种基础但非常强大的图像级操作。通过选择合适的阈值方法(全局或自适应),可以将灰度图像转换为对比鲜明的黑白图像,为后续的图像分析和处理步骤奠定基础。使用像 OpenCV 这样的库可以大大简化 C/C++ 中的图像处理任务。
希望这篇文章能帮助你理解图像二值化及其在 C/C++ 中的实现!
相关文章:

c/c++的opencv像素级操作二值化
图像级操作:使用 C/C 进行二值化 在数字图像处理中,图像级操作 (Image-Level Operations) 是指直接在图像的像素级别上进行处理,以改变图像的视觉特性或提取有用信息。这些操作通常不依赖于图像的全局结构,而是关注每个像素及其邻…...
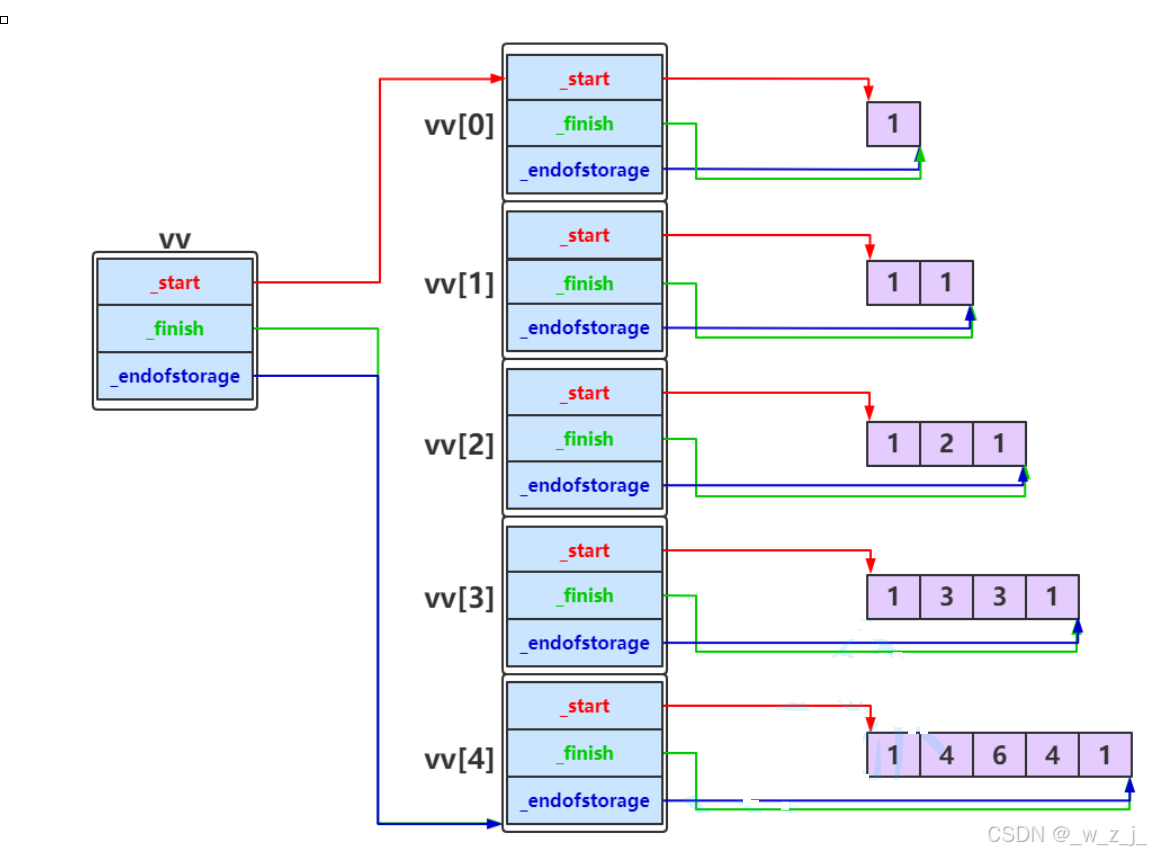
C++----Vector的模拟实现
上一节讲了string的模拟实现,string的出现时间比vector靠前,所以一些函数给的也比较冗余,而后来的vector、list等在此基础上做了优化。这节讲一讲vector的模拟实现,vector与模板具有联系,而string的底层就是vector的一…...

Mac redis下载和安装
目录 1、官网:https://redis.io/ 2、滑到最底下 3、下载资源 4、安装: 5、输入 sudo make test 进行编译测试 会提示 编辑 6、sudo make install 继续 7、输入 src/redis-server 启动服务器 8、输入 src/redis-cli 启动测试端 1、官网ÿ…...
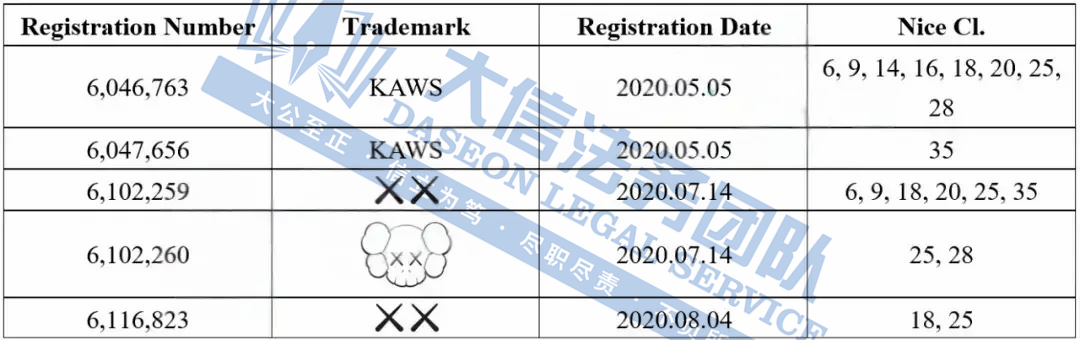
[25-cv-05718]BSF律所代理潮流品牌KAWS公仔(商标+版权)
潮流品牌KAWS公仔 案件号:25-cv-05718 立案时间:2025年5月21日 原告:KAWS, INC. 代理律所:Boies Schiller Flexner LLP 原告介绍 原告是一家由美国街头艺术家Brian Donnelly创立的公司,成立于2002年2月25日&…...
)
【PhysUnits】9 取负重载(negation.rs)
一、源码 这段代码是类型级二进制数(包括正数和负数)的取反和取负操作。它使用了类型系统来表示二进制数,并通过特质(trait)和泛型来实现递归操作。 use super::basic::{B0, B1, Z0, N1}; use core::ops::Neg;// 反…...

深度思考、弹性实施,业务流程自动化的实践指南
随着市场环境愈发复杂化,各类型企业的业务步伐为了跟得上市场节奏也逐步变得紧张,似乎只有保持极强的竞争力、削减成本、提升抗压能力才能在市场洪流中博得一席之位。此刻企业需要制定更明智的解决方案,以更快、更准确地优化决策流程。与简单…...
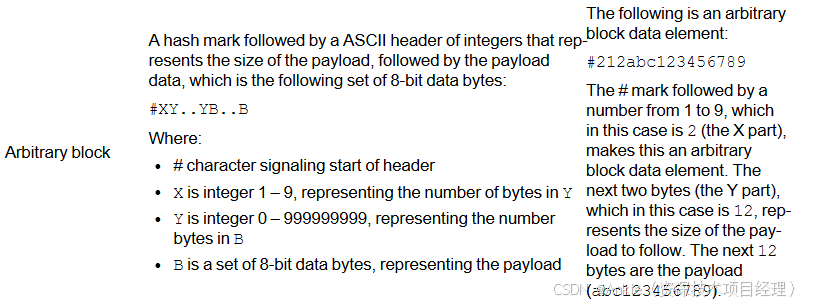
UWB:litepoint获取txquality里面的NRMSE
在使用litepoint测试UWB,获取txquality里面的NRMSE时,网页端可以正常获取NRMSE。但是通过SCPI 命令来获取NRMSE一直出错。 NRMSE数据类型和pyvisa问题: 参考了user guide,发现NRMSE的数值是ARBITRARY_BLOCK FLOAT,非string。 pyvisa无法解析会返回错误。 查询了各种办法…...
VUE npm ERR! code ERESOLVE, npm ERR! ERESOLVE could not resolve, 错误有效解决
VUE : npm ERR! code ERESOLVE npm ERR! ERESOLVE could not resolve 错误有效解决 npm install 安装组件的时候出现以上问题,npm版本问题报错解决方法:用上述方法安装完成之后又出现其他的问题 npm install 安装组件的时候出现以上问题&…...

IoT/HCIP实验-1/物联网开发平台实验Part1(快速入门,MQTT.fx对接IoTDA)
文章目录 实验介绍设备接入IoTDA进入IoTDA平台什么是IoTDA 开通服务创建产品和设备定义产品模型(Profile)设备注册简思(实例-产品-设备) 模拟.与平台通信虚拟设备/MQTT.fx应用 Web 控制台QA用户或密码错误QA证书导致的连接失败设备与平台连接成功 上报数…...
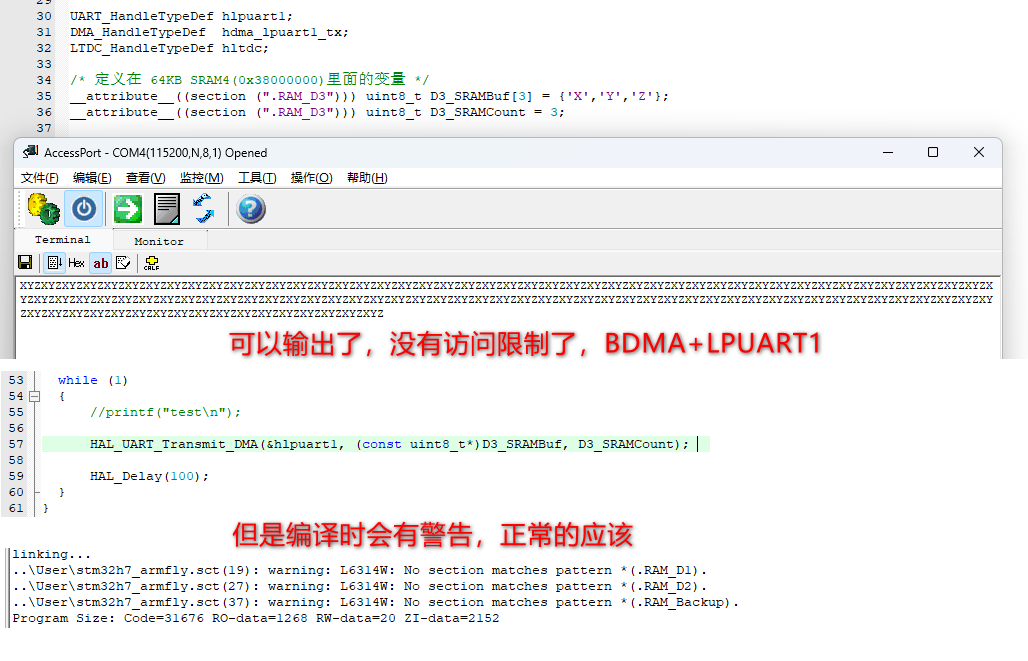
DMA STM32H7 Domains and space distrubution
DMA这个数据搬运工,对谁都好,任劳任怨,接受雇主设备的数据搬运业务。每天都忙碌着!哈哈哈。 1. DMA 不可能单独工作,必须接收其他雇主的业务,所以数据搬运业务的参与者是DMA本身和业务需求发起者。 2. 一…...
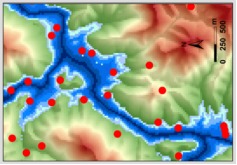
洪水危险性评价与风险防控全攻略:从HEC-RAS数值模拟到ArcGIS水文分析,一键式自动化工具实战,助力防洪减灾与应急管理
🔍 洪水淹没危险性是洪水损失评估、风险评估及洪水应急和管理规划等工作的重要基础。当前,我国正在开展的自然灾害风险普查工作,对洪水灾害给予了重点关注,提出了对洪水灾害危险性及风险评估的明确要求。洪水危险性及风险评估通常…...

Gemini Pro 2.5 输出
好的,我已经按照您的要求,将顶部横幅提示消息修改为右下角的 Toast 样式通知。 以下是涉及更改的文件及其内容: 1. my/src/html-ui.js 移除了旧的 #message-area div。在 <body> 底部添加了新的 #toast-container div 用于存放 Toas…...

SQL Server 和 MySQL 对比
下面是 SQL Server 和 MySQL 的详细对比,从功能、性能、成本、生态等多个维度展开,帮助你判断在什么情况下该选择哪一个。 ✅ 总览对比表 维度SQL ServerMySQL开发公司微软(Microsoft)Oracle(2008年起)是否…...
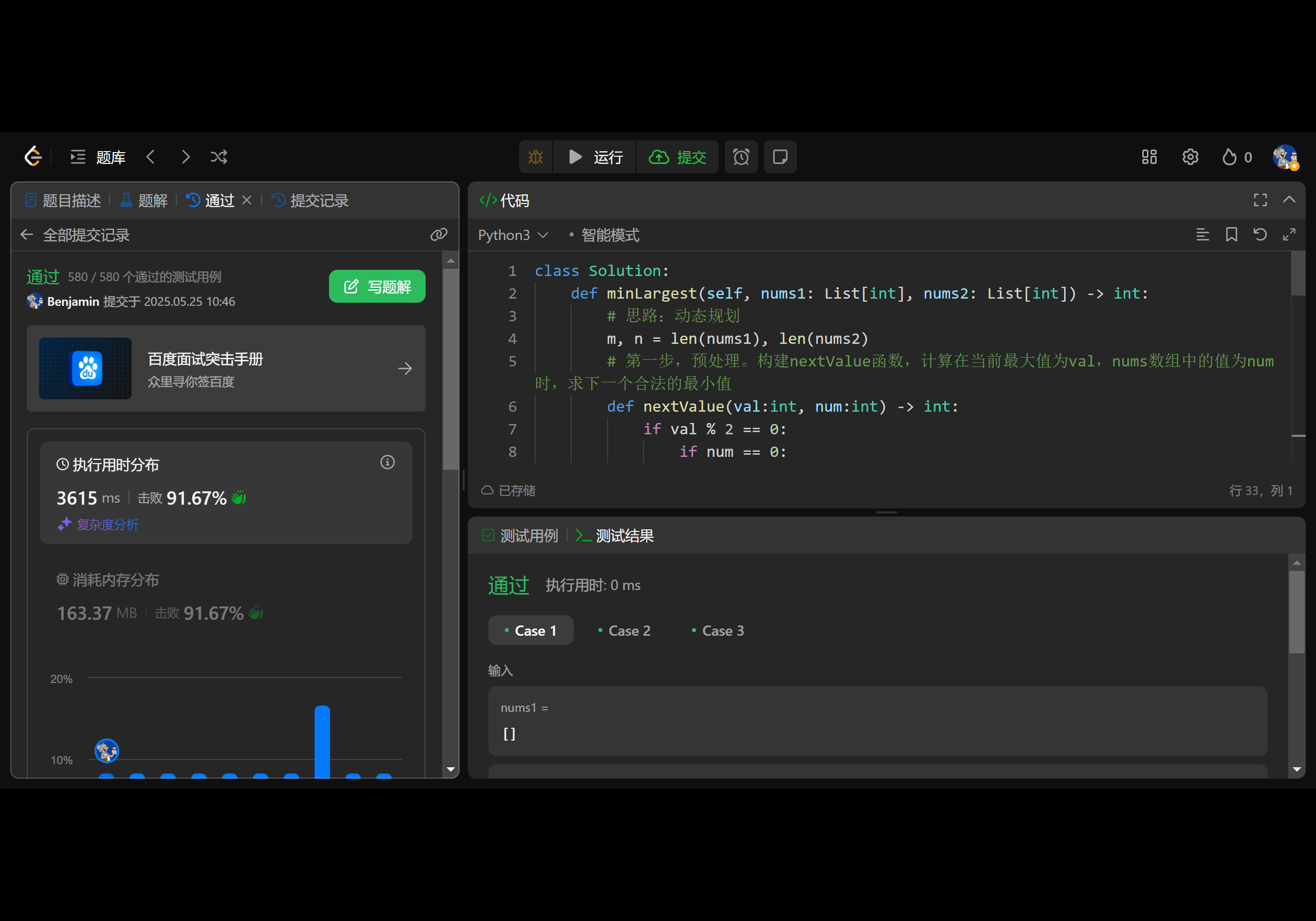
Leetcode 3269. 构建两个递增数组
1.题目基本信息 1.1.题目描述 给定两个只包含 0 和 1 的整数数组 nums1 和 nums2,你的任务是执行下面操作后使数组 nums1 和 nums2 中 最大 可达数字 尽可能小。 将每个 0 替换为正偶数,将每个 1 替换为正奇数。在替换后,两个数组都应该 递…...

三轴云台之积分分离PID控制算法篇
一、核心原理 积分分离PID控制的核心在于动态调整积分项的作用,以解决传统PID在三轴云台应用中的超调、振荡问题: 大误差阶段(如云台启动或快速调整时): 关闭积分项,仅使用比例(P)…...

【Elasticsearch】scripted_upsert
在 Elasticsearch 中,scripted_upsert 是一个用于更新操作的参数,它允许在文档不存在时通过脚本初始化文档内容,而不是直接使用 upsert 部分的内容。这种方式提供了更灵活的文档创建和更新逻辑。 scripted_upsert 的工作原理 当设置 scripte…...

uv - 一个现代化的项目+环境管理工具
参考: 【uv】Python迄今最好的项目管理环境管理工具(吧?)_哔哩哔哩_bilibili 项目需求 想象,每次创建一个项目的时候,我们需要去写 README. md, .git 仓库, .gitignore,你会感觉很头大 对于 …...

经典密码学和现代密码学的结构及其主要区别(2)维吉尼亚密码—附py代码
Vigenre cipher 维吉尼亚密码 维吉尼亚密码由布莱斯德维吉尼亚在 16 世纪发明,是凯撒密码的一个更复杂的扩展。它是一种多字母替换密码,使用一个关键字来确定明文中不同字母的多个移位值。 与凯撒密码不同,凯撒密码对所有字母都有固定的偏移…...

Elasticsearch 节点角色详解及协调节点请求策略
引言 Elasticsearch 集群中的节点可以承担多种角色,如主节点、数据节点、预处理节点和协调节点。合理配置和理解这些节点角色,对于保障集群的高可用性、性能优化以及请求调度至关重要。本文将深入解析各类节点的职责与配置方式,并介绍如何通…...

视频逐帧提取图片的工具
软件功能:可以将视频逐帧提取图片,可以设置每秒提取多少帧,选择提取图片质量测试环境:Windows 10软件设置:由于软件需要通过FFmpeg提取图片,运行软件前请先设置FFmpeg,具体步骤 1. 请将…...
数据结构第1章编程基础 (竟成)
第 1 章 编程基础 1.1 前言 因为数据结构的代码大多采用 C 语言进行描述。而且,408 考试每年都有一道分值为 13 - 15 的编程题,要求使用 C/C 语言编写代码。所以,本书专门用一章来介绍 408 考试所需的 C/C 基础知识。有基础的考生可以快速浏览…...

互联网大厂Java求职面试:AI大模型与云原生架构融合中的挑战
互联网大厂Java求职面试:AI大模型与云原生架构融合中的挑战 在互联网大厂的Java求职面试中,面试官往往以技术总监的身份,针对候选人对AI、大模型应用集成、云原生和低代码等新兴技术的理解与实践能力进行考察。以下是一个典型的面试场景&…...
msql的乐观锁和幂等性问题解决方案
目录 1、介绍 2、乐观锁 2.1、核心思想 2.2、实现方式 1. 使用 version 字段(推荐) 2. 使用 timestamp 字段 2.3、如何处理冲突 2.4、乐观锁局限性 3、幂等性 3.1、什么是幂等性 3.2、乐观锁与幂等性的关系 1. 乐观锁如何辅助幂等性…...

Python 实现桶排序详解
1. 核心原理 桶排序是一种非比较型排序算法,通过将数据分配到多个“桶”中,每个桶单独排序后再合并。其核心步骤包括: 分桶:根据元素的范围或分布,将数据分配到有限数量的桶中。桶内排序:对每个非空桶内的…...
——编码器(Encoder)、解码器(Decoder))
大模型(5)——编码器(Encoder)、解码器(Decoder)
文章目录 一、编码器(Encoder)1. 核心作用2. 典型结构(以Transformer为例)3. 应用场景 二、解码器(Decoder)1. 核心作用2. 典型结构(以Transformer为例)3. 应用场景 三、编码器与解码…...

Web3怎么本地测试连接以太坊?
ETHEREUM_RPC_URLhttps://sepolia.infura.io/v3/你的_INFURA_API_KEY 如果你没有 Infura Key,注册 Infura 或 Alchemy,拿一个免费测试网节点就行: Infura:https://infura.io Alchemy:Alchemy - the web3 developme…...
)
Vue-02 (使用不同的 Vue CLI 插件)
使用不同的 Vue CLI 插件 Vue CLI 插件扩展了 Vue 项目的功能,让你可以轻松集成 TypeScript、Vuex、路由等功能。它们可以自动进行配置和设置,从而节省您的时间和精力。了解如何使用这些插件对于高效的 Vue 开发至关重要。 了解 Vue CLI 插件 Vue CLI…...

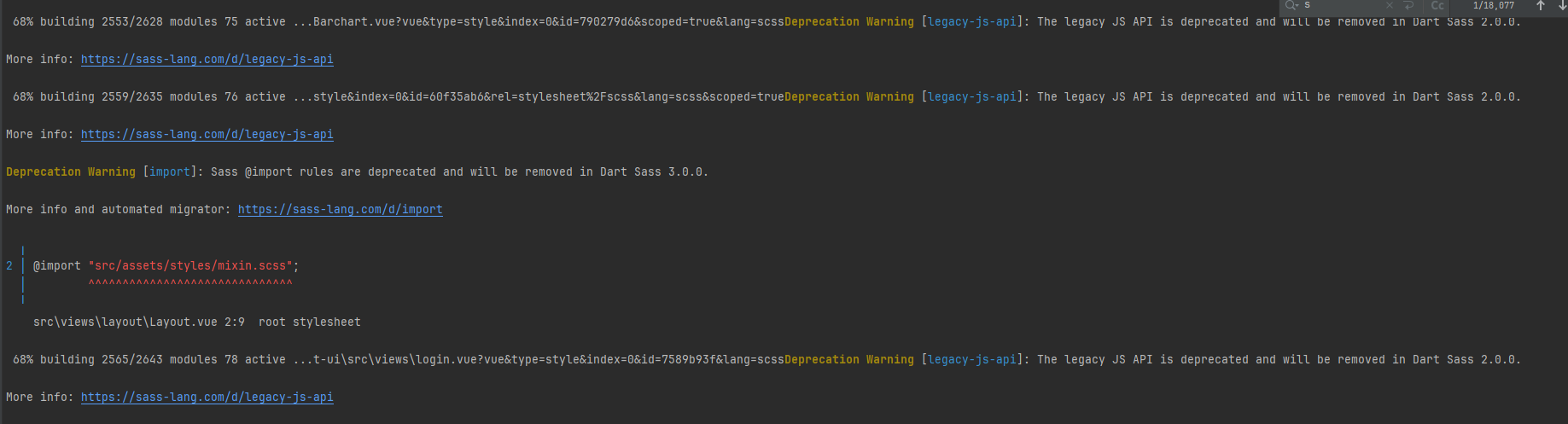
理解vue-cli 中进行构建优化
在 Vue CLI 项目中进行构建优化,是前端性能提升的重要手段。它涉及到 Webpack 配置、代码分包、懒加载、依赖优化、图片压缩等多个方面。 🧱 基础构建优化 设置生产环境变量 NODE_ENVproduction Vue CLI 会自动在 npm run build 时开启以下优化&…...
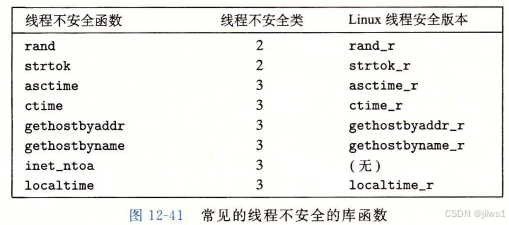
理解计算机系统_线程(九):线程安全问题
前言 以<深入理解计算机系统>(以下称“本书”)内容为基础,对程序的整个过程进行梳理。本书内容对整个计算机系统做了系统性导引,每部分内容都是单独的一门课.学习深度根据自己需要来定 引入 接续理解计算机系统_线程(八):并行-CSDN博客,内容包括12.7…...
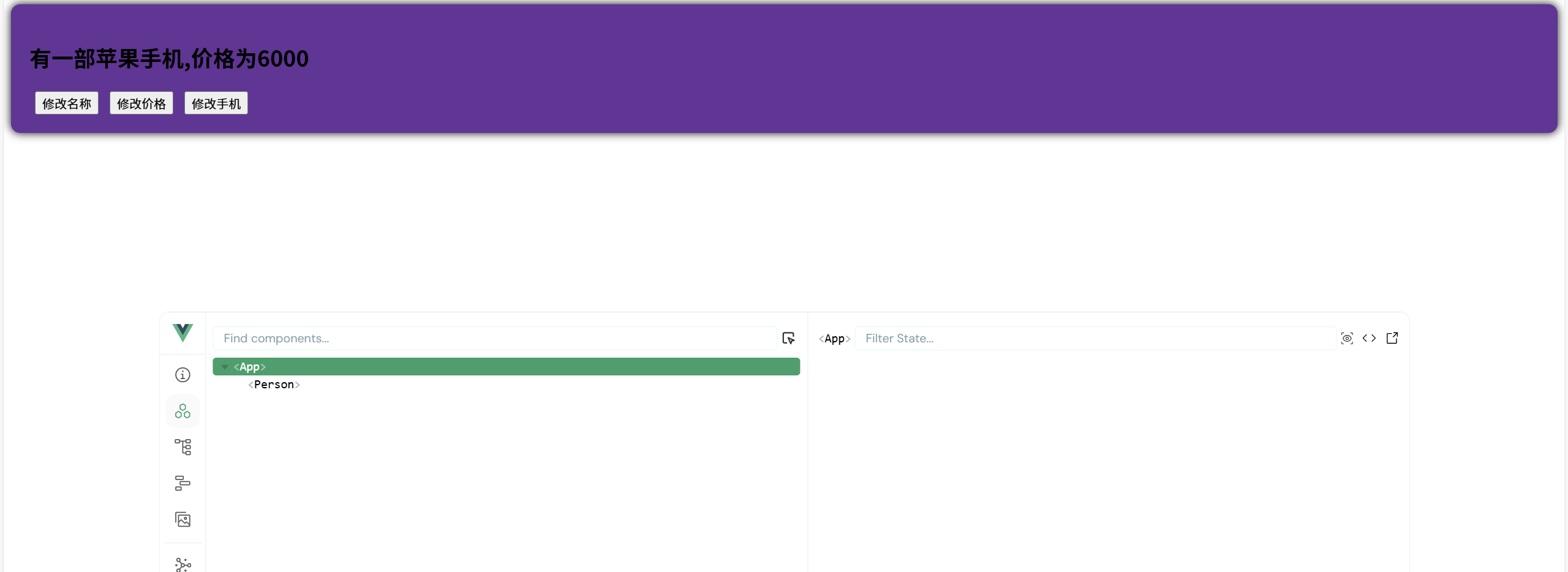
vue3基本类型和对象类型的响应式数据
vue3中基本类型和对象类型的响应式数据 OptionsAPI与CompstitionAPI的区别 OptionsAPI Options API • 特点:基于选项(options)来组织代码,将逻辑按照生命周期、数据、方法等分类。• 结构:代码按照 data 、 methods…...