【C++】—— 从零开始封装 Map 与 Set:实现与优化

人生的态度是,抱最大的希望,尽最大的努力,做最坏的打算。
—— 柏拉图 《理想国》
目录
1、理论基石——深度剖析 BSTree、AVLTree 与 RBTree 的概念区别
2、迭代器机制——RBTree 迭代器的架构与工程实现
3、高级容器设计——Map 与 Set 的模块化封装
3.1 泛型支持增强——RBTree 模板参数设计优化
3.2 Set 容器构建——面向集合操作的优化设计
3.3 Map 容器构建——高效键值存储的封装实现
Thanks谢谢阅读!!!
1、理论基石——深度剖析 BSTree、AVLTree 与 RBTree 的概念区别
为了实现 Map 和 Set 的封装,我们首先进行了充分的知识储备,确保理解底层数据结构的原理与实现。
二叉搜索树及其变种
为了深入理解 Map 和 Set 的底层原理,我们从二叉搜索树 (BST)入手。二叉搜索树在二叉树的基础上加入了以下重要特性:
- 若左子树不为空,则左子树上所有节点的值都小于根节点的值;
- 若右子树不为空,则右子树上所有节点的值都大于根节点的值;
- 左右子树也必须分别满足二叉搜索树的性质。
这种结构在大多数情况下可以有效支持快速查找,但在某些极端情况下(例如单侧树形结构),搜索效率会退化为 O(n)。因此,我们引入了更为高效的平衡二叉搜索树,其中 AVL树 和 红黑树 (RBTree) 是两种经典的变种,它们通过不同的方式提高了性能与稳定性。
平衡二叉搜索树:AVL 树与红黑树
AVL 树 和 红黑树 都是在保持二叉搜索树基本性质的基础上,通过旋转与重新平衡操作,确保树的高度维持在一个相对平衡的状态,从而保证了操作的时间复杂度始终为 O(log n)。它们的出现大大提升了二叉搜索树在实际应用中的性能与可靠性。
-
AVL 树 增加了以下特性:
- 它的左右子树必须都是 AVL 树;
- 左右子树高度差(平衡因子)不能超过 1(即平衡因子为 -1、0 或 1);
- 如果平衡因子超出范围,树将进行旋转操作,包括右单旋、左单旋、左右双旋、右左双旋等。
-
红黑树 则在其基础上引入了以下特点:
- 每个节点必须是红色或黑色;
- 根节点必须是黑色;
- 红色节点的子节点必须是黑色;
- 从任何节点到其所有后代叶子节点的路径上,必须有相同数量的黑色节点;
- 叶子节点(空节点)必须是黑色。
虽然红黑树在旋转操作的频率上低于 AVL 树,但它通过较少的旋转保持树的接近平衡状态,能够确保良好的性能。
Map 与 Set 的底层实现
由于 Map 和 Set 大多用于高效检索,我们选择使用 红黑树 来实现它们的底层结构。红黑树能够在保证相对平衡的同时,确保操作时间复杂度为 O(log n),非常适合用于处理大量的键值对数据。
封装前的迭代器实现
在封装 Map 和 Set 之前,我们需要先实现一个关键的组件:迭代器。迭代器是遍历容器内元素的核心工具,它提供了访问和操作元素的方式,并为我们后续的封装工作奠定了基础。
2、迭代器机制——RBTree 迭代器的架构与工程实现
迭代器是容器中非常重要的组成部分,它使得我们可以方便地遍历数据。在 红黑树 的实现中,增加迭代器支持不仅仅是为了提供遍历的便利,更是为了使得红黑树能够符合现代 C++ 泛型编程的要求,遵循 STL 中对迭代器的严格规范。
首先,考虑到迭代器的设计,我们需要解决几个关键问题:
-
泛型编程与迭代器框架
迭代器的实现要支持泛型编程,因此需要考虑其接口设计,确保它能适应不同类型的容器结构。具体而言,我们需要实现一个适用于红黑树的迭代器模板,支持不同类型的键值对容器。 -
begin() 与 end() 的设计
STL 明确规定了 begin() 与 end() 方法分别代表容器的起始位置和结束位置,且是前闭后开的区间。在红黑树的情况下,由于其节点经过中序遍历是有序的,begin() 应该指向树的最小节点(即最左侧节点),end() 则应指向一个空节点,即最大节点的下一个位置(为了简化设计,可以设为nullptr)。 -
operator++() 和 operator--() 的实现
在迭代器的操作符++和--实现上,需要遵循红黑树的中序遍历顺序。与链表或数组不同,红黑树的节点并不是顺序排列的,因此简单的指针递增或递减操作无法满足需求。我们需要通过树的结构来确定“下一个”或“上一个”节点的位置,这通常通过旋转和父节点引用来实现。
迭代器框架的搭建
在确定了迭代器的需求后,接下来我们可以着手搭建迭代器框架。该框架需要支持以下功能:
- 构造与销毁:支持红黑树迭代器的构造与析构。
- 指针访问:提供对当前节点的访问能力,通常通过解引用操作符
*和成员访问操作符->来实现。 - 前进与后退:通过
++和--操作符来支持迭代器的前进与后退,确保其符合树的中序遍历规则。 - 比较操作:支持
==和!=比较操作,判断两个迭代器是否指向同一节点。
// 迭代器
// T 表示数据类型 Ref为引用 Ptr为指针
template<class T,class Ptr,class Ref>
struct RBTreeIterator
{//为了方便调用,我们重命名一下typedef RBTreeNode<T> Node;typedef _RBTreeIterator<T, Ref, Ptr> Self;//内部是节点指针Node* _node;_RBTreeIterator(Node* node):_node(node){}//两种指向方式Ref operator*(){return _node->_data;}Ptr operator&(){return &_node->_data;}bool operator!= (const Self& s){return _node != s._node;}bool operator== (const Self& s){return _node == s._node;}};迭代器的访问 ++ 和 --
++ 中序遍历的顺序是先遍历左边再遍历当前节点最后是右子树。
Self& operator++()
{//首先,能访问到当前节点说明左子树的都已经访问过啦 左 根 右 中序//所以就要分类讨论//如果右边有子树,就要去寻找右子树的最左节点if (_node->_right){Node* cur = _node->_right;while (cur->_left){cur = cur->_left;}_node = cur;}//如果右边没有子树了,说明该节点以下的子树都已遍历完,那么就要向上进行++//找到祖先节点(注意祖先节点右边可能还没遍历)//此时也要进行分类讨论else {Node* cur = _node;Node* parent = _node->_parent;// 如果 _node == parent->_right//说明parent的节点已经访问过了 需要向上遍历 找到没有访问的 可能一直向上 导致 parent 空 所以判断一下while (parent && cur == parent->_right){cur = parent;parent = cur->_parent;}_node = parent;}return *this;
}适度结合图像分析,还是要遵循左根右的核心思维决定下一个节点的位置
-- 倒中序遍历 右 根 左 逻辑取反即可
Self& operator--()
{if (_node == nullptr) // end(){// --end(),特殊处理,走到中序最后⼀个结点,整棵树的最右结点Node* rightMost = _root;while (rightMost && rightMost->_right){rightMost = rightMost->_right;} _node = rightMost;}//首先,能访问到当前节点说明右子树的都已经访问过啦 右 根 左 倒中序//所以就要分类讨论//如果左边有子树,就要去寻找左子树的最右节点else if (_node->_left){Node* cur = _node->_left;while (cur->_right){cur = cur->_right;}_node = cur;}//如果左边没有子树了,说明该节点以下的子树都已遍历完,那么就要向上进行--//找到祖先节点(注意祖先节左边可能还没遍历)//此时也要进行分类讨论else{Node* cur = _node;Node* parent = _node->_parent;// 如果 _node == parent->_left //说明parent的节点已经访问过了 需要向上遍历 找到没有访问的 可能一直向上 导致 parent 空 所以判断一下while (parent && cur == parent->_left){cur = parent;parent = cur->_parent;}_node = parent;}return *this;
}
这里特殊情况是因为 我们设置的容器迭代器 end() 为空指针 (STTL库是加了个哨兵位节点)不可以再访问了所以特殊处理一下

3、高级容器设计——Map 与 Set 的模块化封装
3.1 泛型支持增强——RBTree 模板参数设计优化
我们先来看之前写的红黑树的节点代码:
// 节点结构体
template<class K, class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv;color _col;RBTreeNode(pair<K, V> kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv){}};
在实现 Map 和 Set 的封装时,我们发现,当前的设计使得每个红黑树的节点都存储了一个固定的数据类型 pair<K, V>。这种做法虽然对 Map 的实现来说非常直接,但当我们尝试为 Set 封装时,问题就显现出来了:Set 中的节点只需要存储键 K,而不是键值对 pair<K, V>。这意味着如果我们照这种方式实现 Set,我们就不得不重复编写一份类似的红黑树代码来处理不同的数据结构。这样不仅增加了代码的冗余,也让代码的维护变得不够优雅。
为了更好地封装 Map 和 Set,我们可以借鉴 STL 源码中的设计理念。STL 中通过 模板编程 和 类型特化 的方式,使得同一个数据结构能够支持不同类型的容器,而不需要重复编写代码。这种设计不仅提高了代码的复用性,还使得容器能够灵活地处理不同的数据类型。
STL 的设计思路
在 STL 中,Map 和 Set 都是通过底层红黑树(或其他平衡树)来实现的,但它们有不同的结构和需求:
- Map 是一个键值对容器,节点存储
pair<K, V>; - Set 是一个只存储键的容器,节点只需要存储
K。
然而,尽管它们的数据存储结构不同,STL 并没有为 Map 和 Set 分别写两份完全不同的红黑树代码。相反,STL 通过巧妙的模板设计,使得同一个红黑树实现能够根据需求灵活存储键值对或者仅存储键。

可以看出,STL 源码中的设计巧妙地利用了模板编程,成功地实现了 Map 和 Set 的统一封装,避免了代码冗余。
STL设计思路解析
首先,最底层的红黑树节点结构体只使用了一个模板参数 Value,该参数决定了节点中存储的数据类型。上层的红黑树根据提供的 Value 类型来选择具体的数据存储结构。这样,红黑树的底层实现不需要区分 Map 和 Set,而是通过模板参数 Value 来灵活适应不同需求。
红黑树的关键模板参数
在红黑树的实现中,存在三个关键的模板参数:
- Key:表示键的类型,主要用于查找操作(如
Find函数)。通过 Key,红黑树可以高效地定位某个节点是否存在。 - Value:表示存储的数据类型。在 Map 中,Value 是
pair<K, V>,而在 Set 中,Value 则只有键 K。 - KeyOfValue:这是一个仿函数,用于从 Value 中提取 Key。该仿函数在很多操作中都非常重要,特别是在查找操作中,它能帮助我们从 Value 中提取出 Key,用于比较和定位。
统一封装:如何实现 Map 与 Set 的共享底层红黑树
通过巧妙的模板设计,红黑树底层实现可以根据不同的需求使用不同的数据结构来存储:
- 对于 Map,底层红黑树将 Key 和 pair<K, V> 作为模板参数传入。Key 用于查找操作,而 Value 则是
pair<K, V>,即包含键和值的结构。 - map:就传给红黑树
<K , pair<K,V> ...> - 对于 Set,红黑树只需要 Key 作为模板参数,因为 Set 只关心存储键 K,无需存储值,但是这里红黑树的前两个模板参数都需要传K。
- set: 就传给红黑树
<K , K ...>
通过这种方式,尽管 Map 和 Set 的模板参数不同(分别是 pair<K, V> 和 K),它们却可以共用同一份底层红黑树代码。这种设计不仅避免了代码重复,也提高了代码的可维护性和灵活性。
//-------------------------------------------
//---------------- 红黑树实现 -----------------
//-------------------------------------------
//-------- 适配map 与 set 的进阶版本 -----------
//-------------------------------------------enum color
{Black,Red
};
// 节点结构体
template<class T>
struct RBTreeNode
{ RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;T _data;color _col;RBTreeNode(T data):_left(nullptr),_right(nullptr),_parent(nullptr),_data(data),_col(Red){}};//适配map与set 的版本
// 迭代器
template<class T , class Ref , class Ptr>
struct _RBTreeIterator
{typedef RBTreeNode<T> Node;typedef _RBTreeIterator<T, Ref, Ptr> Self;Node* _node;_RBTreeIterator(Node* node):_node(node){}Ref operator*(){return _node->_data;}Ptr operator&(){return &_node->_data;}bool operator!= (const Self& s){return _node != s._node;}//迭代器的++ 中序遍历的顺序Self& operator++(){}Self& operator--(){}
};//K 为键值 T 为储存的结构 map则为pair set则为key KeyOfValue 是取出Key的方式
template<class K, class T , class KeyOfValue>
class RBTree
{
public:typedef _RBTreeIterator<T, T&, T*> Iterator;typedef RBTreeNode<T> Node;Iterator begin(){}Iterator end(){}//右单旋void RotateR(Node* parent){}//左右双旋void RotateLR(Node* parent){}//右左双旋void RotateRL(Node* parent){}//插入函数 pair<Iterator,bool> insert(const T& data)
{if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;//return pair<Iterator, bool>(Iterator(_root,_root),true);return { Iterator(_root,_root), true };}Node* cur = _root;Node* parent = nullptr;//查找逻辑 cur 到对应的位置去// KeyOfT 取第一个数据比较KeyOfT kot;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return { Iterator(cur,_root), false};}}cur = new Node(data);Node* newnode = cur;cur->_col = RED; //新插入非空节点 为红色// 连接 prev 与 curif (kot(parent->_data) > kot(data))parent->_left = cur;elseparent->_right = cur;cur->_parent = parent;// 父亲是红色 出现了连续红节点 需要处理 可能多次处理 while向上更新while (parent && parent->_col == RED) //可能为空{Node* grandfather = parent->_parent;if (grandfather->_left == parent){// g// p uNode* uncle = grandfather->_right;// 叔叔不为空 且红色 if (uncle && uncle->_col == RED){//父亲和叔叔变黑 爷爷变红 变色 解决连续红色节点并且保证 路径黑节点数量不变parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//往上更新cur = grandfather;parent = cur->_parent;}else{if (parent->_left == cur) //右单旋+变色{ // g// p u// cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else //双旋处理{// g// p u// cRotateLR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else{// g// u pNode* uncle = grandfather->_left;// 叔叔不为空 且红色 if (uncle && uncle->_col == RED){//父亲和叔叔变黑 爷爷变红 变色 解决连续红色节点并且保证 路径黑节点数量不变parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//往上更新cur = grandfather;parent = cur->_parent;}else{if (parent->_right == cur) //左单旋+变色{ // g// u p// cRotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else //双旋处理{// g// u p// cRotateRL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return { Iterator(newnode,_root), true};
}Iterator find(const K& key)
{Node* cur = _root;KeyOfT kot;while (cur){if (kot(cur->_data) < key){cur = cur->_right;}else if (kot(cur->_data) > key){cur = cur->_left;}else{return Iterator(cur,_root);}}return End();
}private:void _IsBalance(Node* root , int num){}bool Check(Node* root, int blackNum, const int refNum){}void _InOrder(Node* cur){}RBTreeNode<T>* _root = nullptr;
};
注意比较方式统一改成类似kot(_data) < kot(node.data)的样子哦!!!因为map与set的取出key的方式不同!!!
3.2 Set 容器构建——面向集合操作的优化设计
Set 封装的实现
对于 Set 封装,关键是要根据红黑树的底层实现要求提供相应的模板参数和仿函数。
-
模板参数传递:
Set 需要满足K和V的模板参数传递。K 表示键的类型,V 表示值的类型。 -
仿函数实现:
我们需要实现一个仿函数,用于从存储的 模板参数 V 中提取出 Key。因为比较逻辑是比较键值,但是底层红黑树并不知道T模板参数是pair 还是keystruct SetKeyOfT {const K& operator()(const K&key){return key;} }; -
底层红黑树的实例化:
在 Set 类中,我们实例化一个底层红黑树,传入对应的模板参数K、const K(注意,键是不可修改的,所以需要使用 const 来确保键是常量),以及 SetOfT 仿函数。这样,红黑树能够适应 Set中键值对的存储方式。 -
迭代器的实现:
在 Set 类中,我们还需要实现一个迭代器。只需要提供基本的begin()和end()接口,直接调用底层红黑树的相关方法即可。迭代器的前进(++)和后退(--)操作交给底层红黑树的迭代器来处理。
namespace xc
{template<class K>class set{struct SetKeyOfT{const K& operator()(const K&key){return key;}};public:typedef typename RBTree<K, const K, SetKeyOfT>::Iterator iterator;typedef typename RBTree<K, const K, SetKeyOfT>::ConstIterator const_iterator;iterator begin(){return _t.Begin();}iterator end(){return _t.End();} const_iterator begin()const{return _t.Begin();}const_iterator end()const{return _t.End();}pair<iterator,bool> insert(const K&key){return _t.insert(key);}iterator find(const K& key){return _t.find(key);}private:RBTree<K, const K, SetKeyOfT> _t;};
}3.3 Map 容器构建——高效键值存储的封装实现
在完成了红黑树的改进后,接下来的步骤就相对简单了。我们只需要在上层实现 Map 和 Set 的具体封装,调用底层红黑树的接口并传入相应的模板参数即可。
Map 封装的实现
对于 Map 封装,关键是要根据红黑树的底层实现要求提供相应的模板参数和仿函数。
-
模板参数传递:
Map 需要满足K和V的模板参数传递。K 表示键的类型,V 表示值的类型。 -
仿函数实现:
我们需要实现一个仿函数,用于从存储的 pair<const K, V> 中提取出 Key。因为比较逻辑是比较键值,但是底层红黑树并不知道T模板参数是pair 还是keystruct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}}; -
底层红黑树的实例化:
在 Map 类中,我们实例化一个底层红黑树,传入对应的模板参数K、pair<const K, V>(注意,键是不可修改的,所以需要使用pair<const K, V>来确保键是常量),以及 MapOfT 仿函数。这样,红黑树能够适应 Map 中键值对的存储方式。 -
迭代器的实现:
在 Map 类中,我们还需要实现一个迭代器。只需要提供基本的begin()和end()接口,直接调用底层红黑树的相关方法即可。迭代器的前进(++)和后退(--)操作交给底层红黑树的迭代器来处理。
namespace xc
{template<class K, class V>class map{struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::Iterator iterator;typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::ConstIterator const_iterator;iterator begin(){return _t.Begin();}iterator end(){return _t.End();}const_iterator begin()const{return _t.Begin();}const_iterator end()const{return _t.End();}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.insert(kv);}iterator find(const K& key){return _t.find(key);}V& operator[](const K& key){pair<iterator, bool> ret = insert({ key, V() });return ret.first->second;}private:RBTree<K, pair<const K, V>, MapKeyOfT> _t;};
}这样map 封装好了,测试一下!!!
void test_map()
{xc::map<string, string> dict;dict.insert({ "sort", "排序" });dict.insert({ "left", "左边" });dict.insert({ "right", "右边" });dict["left"] = "左边,剩余";dict["insert"] = "插入";dict["string"];xc::map<string, string>::iterator it = dict.begin();while (it != dict.end()){// 不能修改first,可以修改second//it->first += 'x';it->second += 'x';cout << it->first << ":" << it->second << endl;++it;} cout << endl;for (auto &kv : dict){cout << kv.first << ":" << kv.second << endl;}cout << endl;
}int main()
{test_map();return 0;
}
可以看到我们实现了 map 的关键重载函数 [ ] 
map和set从零建立起来不仅需要二叉搜索树的知识还需要AVL树和红黑树的使用!!!甚至还需要对于模版的更深理解!!!
Thanks谢谢阅读!!!
相关文章:
【C++】—— 从零开始封装 Map 与 Set:实现与优化
人生的态度是,抱最大的希望,尽最大的努力,做最坏的打算。 —— 柏拉图 《理想国》 目录 1、理论基石——深度剖析 BSTree、AVLTree 与 RBTree 的概念区别 2、迭代器机制——RBTree 迭代器的架构与工程实现 3、高级容器设计——Map 与 Set…...

内网穿透之Linux版客户端安装(神卓互联)
选择Linux系统版本 获取安装包 :https://www.shenzhuohl.com/download.html 这里以Ubuntu 18.04为例,其它版本方法类似 登录Ubuntu操作系统: 打开Ubuntu系统终端,更新版本 apt-get update 安装运行环境: 安装C 运…...
开疆智能Profinet转Profibus网关连接CMDF5-8ADe分布式IO配置案例
本案例是客户通过开疆智能研发的Profinet转Profibus网关将PLC的Profinet协议数据转换成IO使用的Profibus协议,操作步骤如下。 配置过程: Profinet一侧设置 1. 打开西门子组态软件进行组态,导入网关在Profinet一侧的GSD文件。 2. 新建项目并…...

华为云Flexus+DeepSeek征文|Flexus云服务器单机部署+CCE容器高可用部署快速搭建生产级的生成式AI应用
前引: 在AI技术高速演进的浪潮中,如何快速、高效、安全地搭建一个大模型应用平台,成为开发者和企业关注的焦点。近日,华为云推出的Flexus云服务器配合CCE容器引擎和Dify LLM应用开发平台,带来了极具吸引力的解决方案。…...

扫地机产品--材质传感器算法开发与虚拟示波器
扫地机产品–材质传感器算法开发与虚拟示波器 文章目录 扫地机产品--材质传感器算法开发与虚拟示波器**一、材质传感器的工作原理**二、核心功能与应用场景三、技术参数与产品示例四.MCU 与压电陶瓷超声波的材质检测技术方案实现原理分析4.1 超声波原理4.2表面类型检测4.3 超声…...

[蓝桥杯]上三角方阵
上三角方阵 题目描述 方阵的主对角线之上称为"上三角"。 请你设计一个用于填充 nn 阶方阵的上三角区域的程序。填充的规则是:使用 1,2,3.... 的自然数列,从左上角开始,按照顺时针方向螺旋填充。 例如&am…...
60天python训练计划----day44
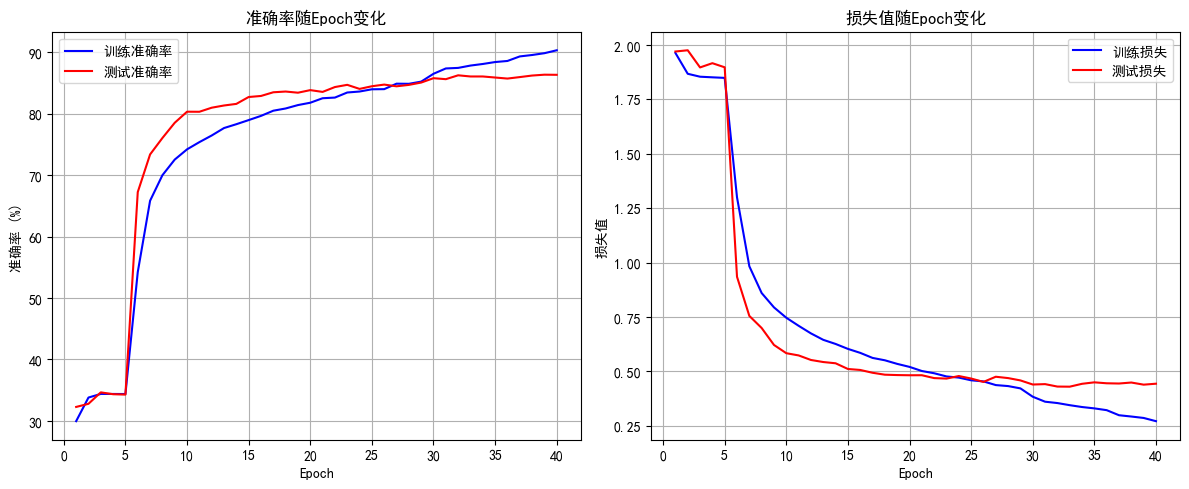
DAY 44 预训练模型 知识点回顾: 预训练的概念常见的分类预训练模型图像预训练模型的发展史预训练的策略预训练代码实战:resnet18 一、预训练的概念 我们之前在训练中发现,准确率最开始随着epoch的增加而增加。随着循环的更新,参数…...

【JAVA版】意象CRM客户关系管理系统+uniapp全开源
一.介绍 CRM意象客户关系管理系统,是一个综合性的客户管理平台,旨在帮助企业高效地管理客户信息、商机、合同以及员工业绩。系统通过首页、系统管理、工作流程、审批中心、线索管理、客户管理、商机管理、合同管理、CRM系统、数据统计和系统配置等模块&…...
API异常信息如何实时发送到钉钉
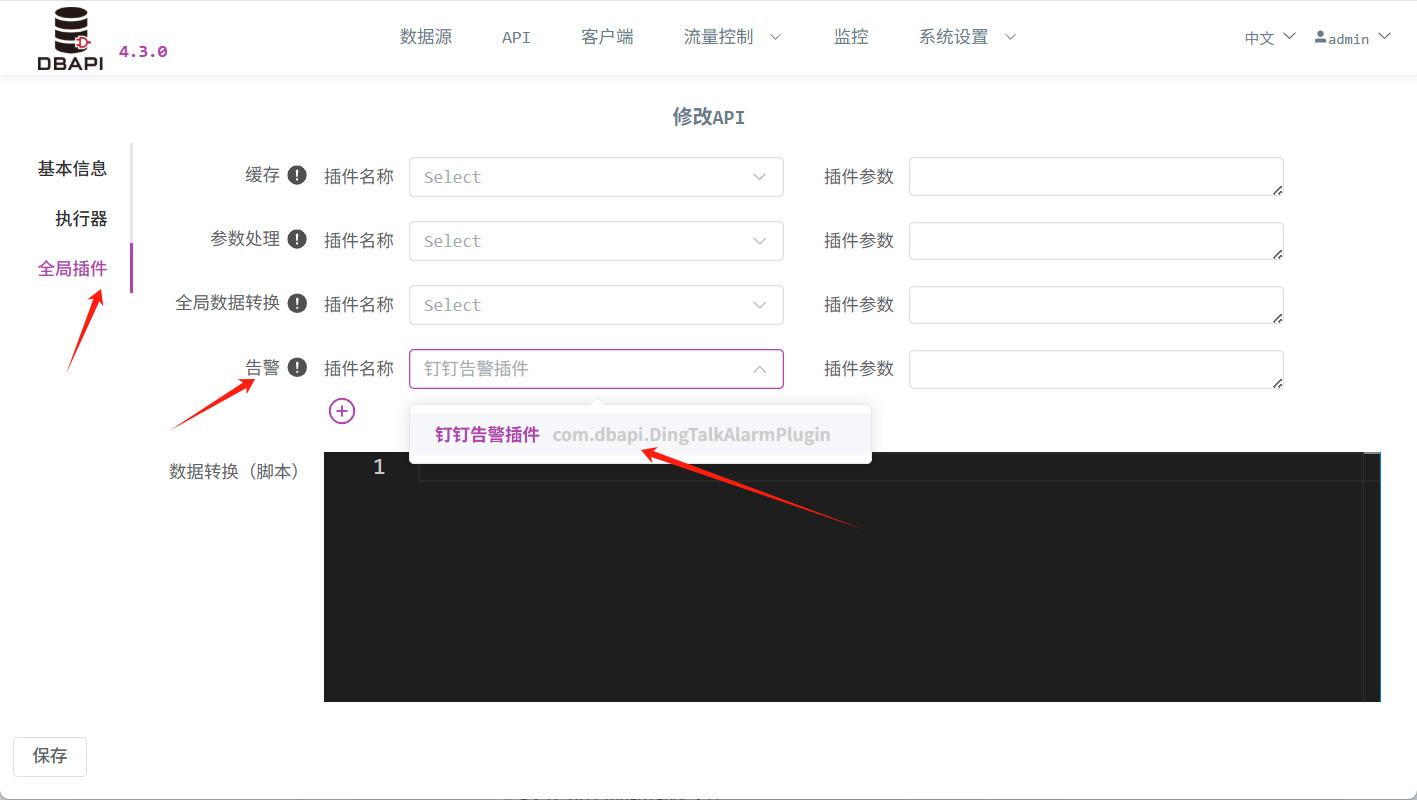
#背景 对于一些重要的API,开发人员会非常关注API有没有报错,为了方便开发人员第一时间获取错误信息,我们可以使用插件来将API报错实时发送到钉钉群。 接下来我们就来实操如何实现 #准备工作 #创建钉钉群 如果已有钉钉群,可以跳…...

Python爬虫(48)基于Scrapy-Redis与深度强化学习的智能分布式爬虫架构设计与实践
目录 一、背景与行业痛点二、核心技术架构设计2.1 分布式爬虫基础架构2.2 深度强化学习模块 三、生产环境实践案例3.1 电商价格监控系统3.2 学术文献采集系统 四、高级优化技术4.1 联邦学习增强4.2 神经架构搜索(NAS) 五、总结🌈Python爬虫相…...

AtCoder Beginner Contest 407 E - Most Valuable Parentheses
AtCoder Beginner Contest 407 E - Most Valuable Parentheses E - Most Valuable Parentheses 反悔贪心算法 性质: 假设长度为 n n n, n ≡ 0 ( m o d 2 ) n \equiv 0 \pmod{2} n≡0(mod2) 的括号序列是合法的,那么有 n 2 \frac{n}{2}…...
(1-6-3)Java 多线程
目录 0.知识拓扑 1. 多线程相关概念 1.1 进程 1.2 线程 1.3 java 中的进程 与 线程概述 1.4 CPU、进程 与 线程的关系 2.多线程的创建方式 2.1 继承Thread类 2.2 实现Runnable接口 2.3 实现Callable接口 2.4 三种创建方式对比 3.线程同步 3.1 线程同步机制概述 …...
java31
1.网络编程 三要素: 网址实质上就是ip InetAddress: UDP通信程序: 多个接收端的地址都要加入同一个组播地址,这样发送端发信息,全部接收端都能接受到数据 广播的代码差不多,就是地址不一样而已 TCP通信程序…...

多模态之智能数字人
多模态下智能数字人的开发是一个复杂且系统性的工程,它融合了人工智能(AI)、计算机图形学、自然语言处理(NLP)、语音技术、计算机视觉(CV)等多个前沿领域。 多模态下智能数字人的开发流程规范 目标: 构建一个能够理解并生成多模态信息(文本、语音、视觉等),具备智…...
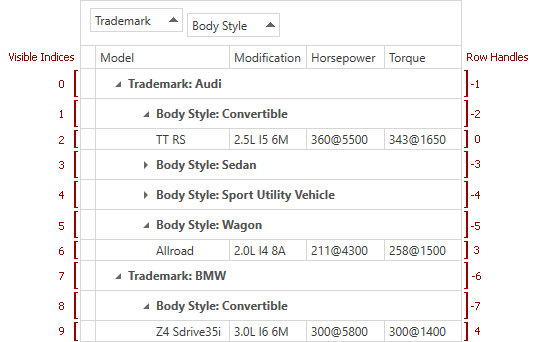
界面组件DevExpress WPF中文教程:Grid - 如何识别行和卡片?
DevExpress WPF拥有120个控件和库,将帮助您交付满足甚至超出企业需求的高性能业务应用程序。通过DevExpress WPF能创建有着强大互动功能的XAML基础应用程序,这些应用程序专注于当代客户的需求和构建未来新一代支持触摸的解决方案。 无论是Office办公软件…...
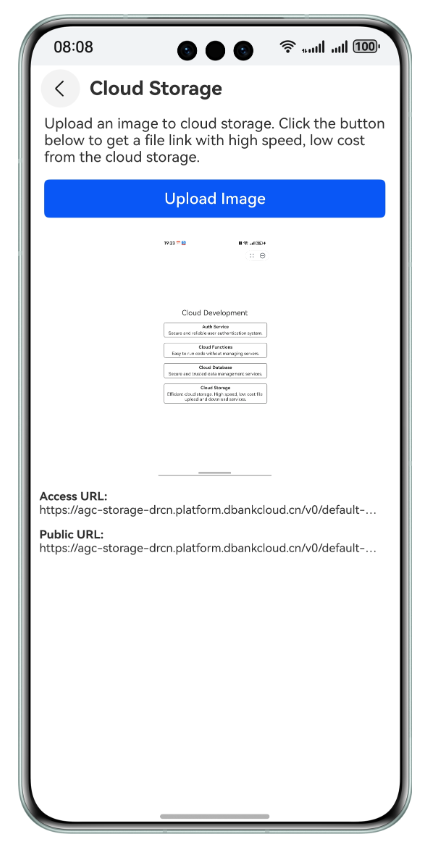
【HarmonyOS Next之旅】DevEco Studio使用指南(三十)
目录 1 -> 部署云侧工程 2 -> 通过CloudDev面板获取云开发资源支持 3 -> 通用云开发模板 3.1 -> 适用范围 3.2 -> 效果图 4 -> 总结 1 -> 部署云侧工程 可以选择在云函数和云数据库全部开发完成后,将整个云工程资源统一部署到AGC云端。…...
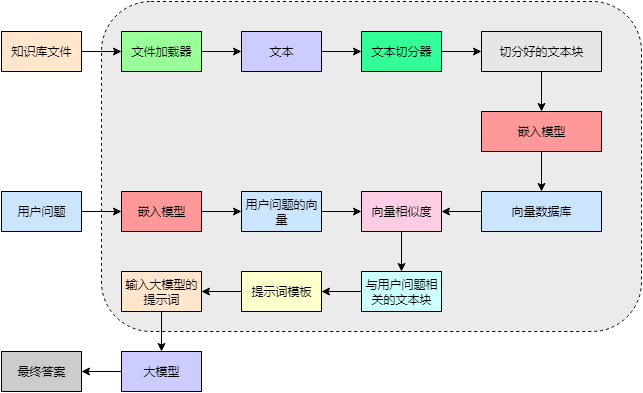
AI基础知识(LLM、prompt、rag、embedding、rerank、mcp、agent、多模态)
AI基础知识(LLM、prompt、rag、embedding、rerank、mcp、agent、多模态) 1、LLM大语言模型 --基于深度学习技术,通过海量文本数据训练而成的超大规模人工智能模型,能够理解、生成和推理自然语言文本 --产品&…...
[蓝桥杯]高僧斗法
高僧斗法 题目描述 古时丧葬活动中经常请高僧做法事。仪式结束后,有时会有"高僧斗法"的趣味节目,以舒缓压抑的气氛。 节目大略步骤为:先用粮食(一般是稻米)在地上"画"出若干级台阶(…...

pycharm F2 修改文件名 修改快捷键
菜单:File-> Setting, Keymap中搜索 Rename, 其中,有 Refactor-> Rename,右键添加快捷键,F2,删除原有快捷键就可以了。...
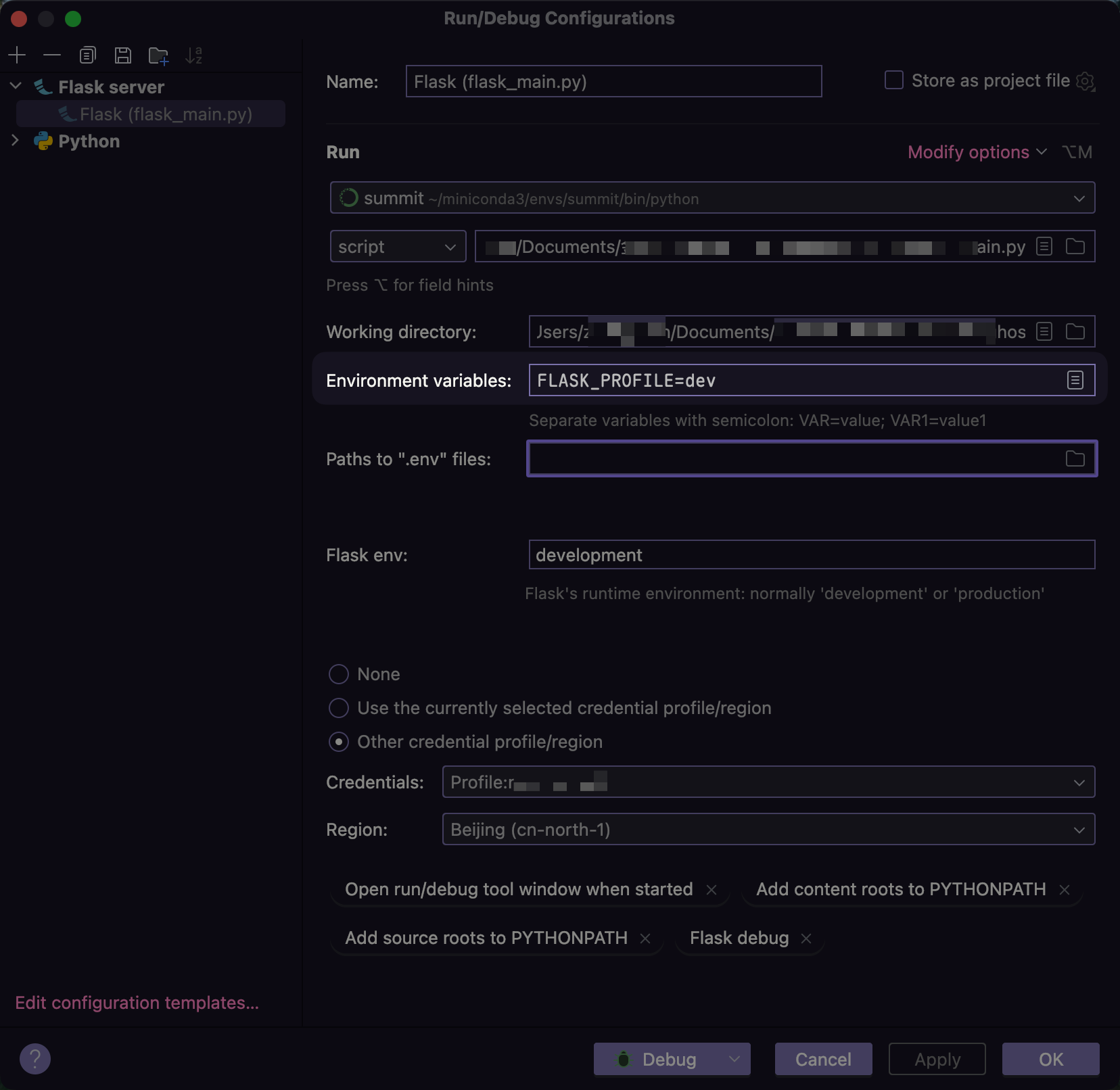
Python Flask中启用AWS Secrets Manager+AWS Parameter Store配置中心
问题 最近需要改造一个Python的Flask项目。需要在这个项目中添加AWS Secrets Manager作为配置中心,主要是数据库相关配置。 前提 得预先在Amazon RDS里面新建好数据库用户和数据库,以AWS Aurora为例子,建库和建用户语句类似如下࿱…...
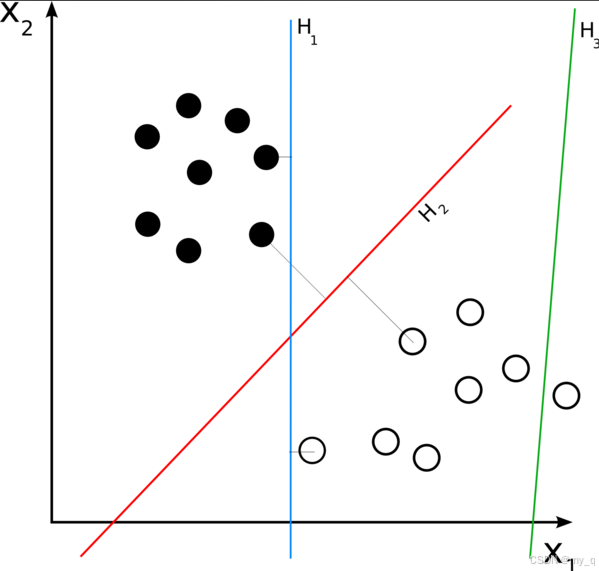
机器学习与深度学习10-支持向量机02
目录 前文回顾6.如何构建SVM7.SVM与多分类问题8.SVM与逻辑回归9.SVM的可扩展性10.SVM的适用性和局限性 前文回顾 上一篇文章链接:地址 6.如何构建SVM 选择合适的核函数和超参数来构建支持向量机(SVM)模型通常需要一定的经验和实验。以下是…...

《深入解析UART协议及其硬件实现》-- 第二篇:UART硬件架构设计与FPGA实现
第二篇:UART硬件架构设计与FPGA实现 1. 模块化架构设计 1.1 系统级框图与时钟域划分 核心模块划分 : 发送模块(TX) :负责数据帧组装与串行输出。 接收模块(RX) :负责串行数据采样与…...

java swing 晃动鼠标改变背景颜色
import java.awt.Color; import java.awt.Component; import java.awt.event.MouseEvent; import java.awt.event.MouseMotionListener;import javax.swing.*; public class testA extends JFrame {testA(){super("晃动鼠标改变背景颜色");setBounds(600, 200, 600, …...
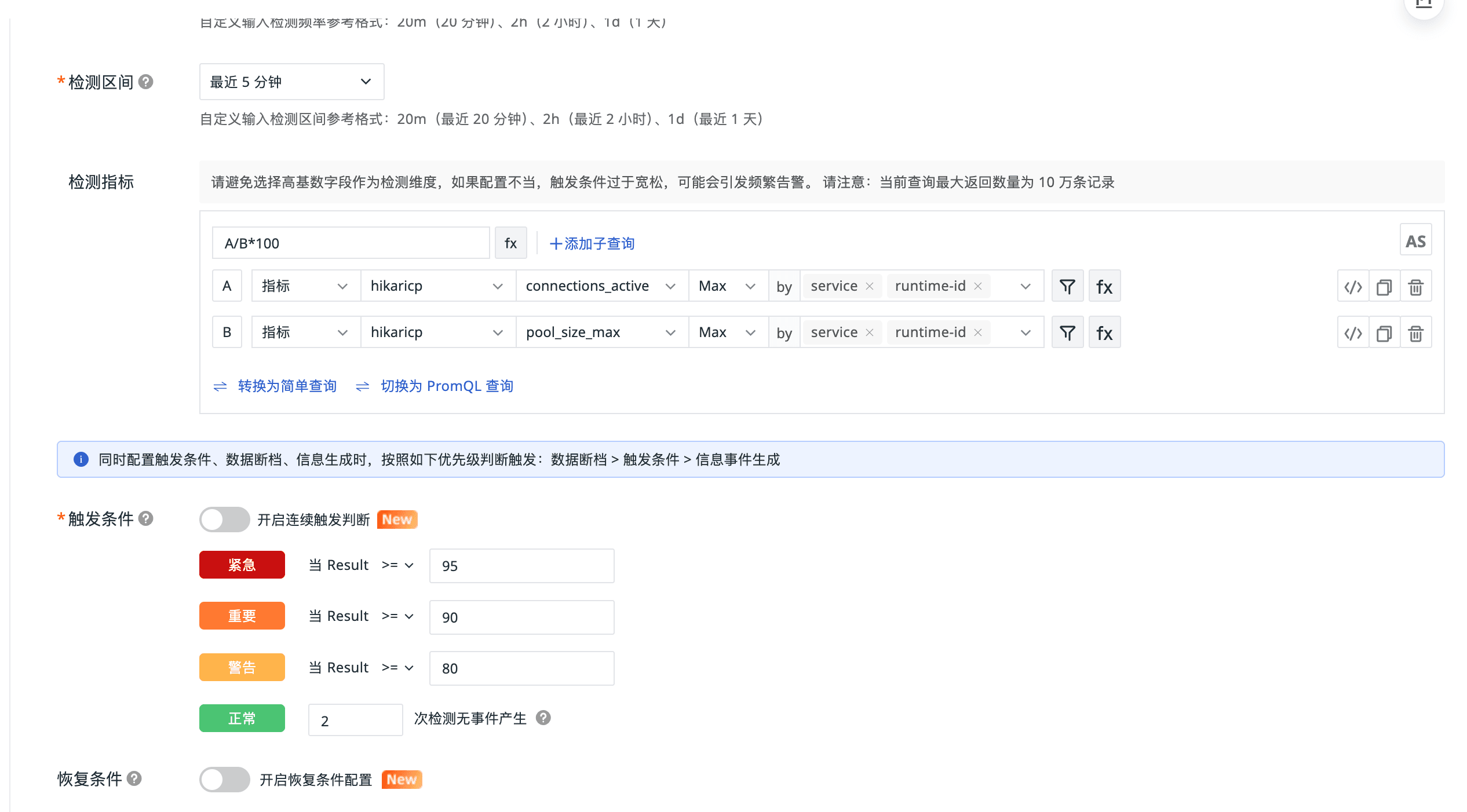
HikariCP 可观测性最佳实践
HikariCP 介绍 HikariCP 是一个高性能、轻量级的 JDBC 连接池,由 Brett Wooldridge 开发。它以“光”命名,象征快速高效。它支持多种数据库,配置简单,通过字节码优化和智能管理,实现低延迟和高并发处理。它还具备自动…...
简简单单探讨下starter
前言 今天其实首先想跟大家探讨下:微服务架构,分业务线了,接入第三方服务、包啥的是否自己定义一个stater更好? 一、starter是什么? 在 Spring Boot 中,Starter 是一种特殊的依赖模块,用于快速…...
PyTest框架学习
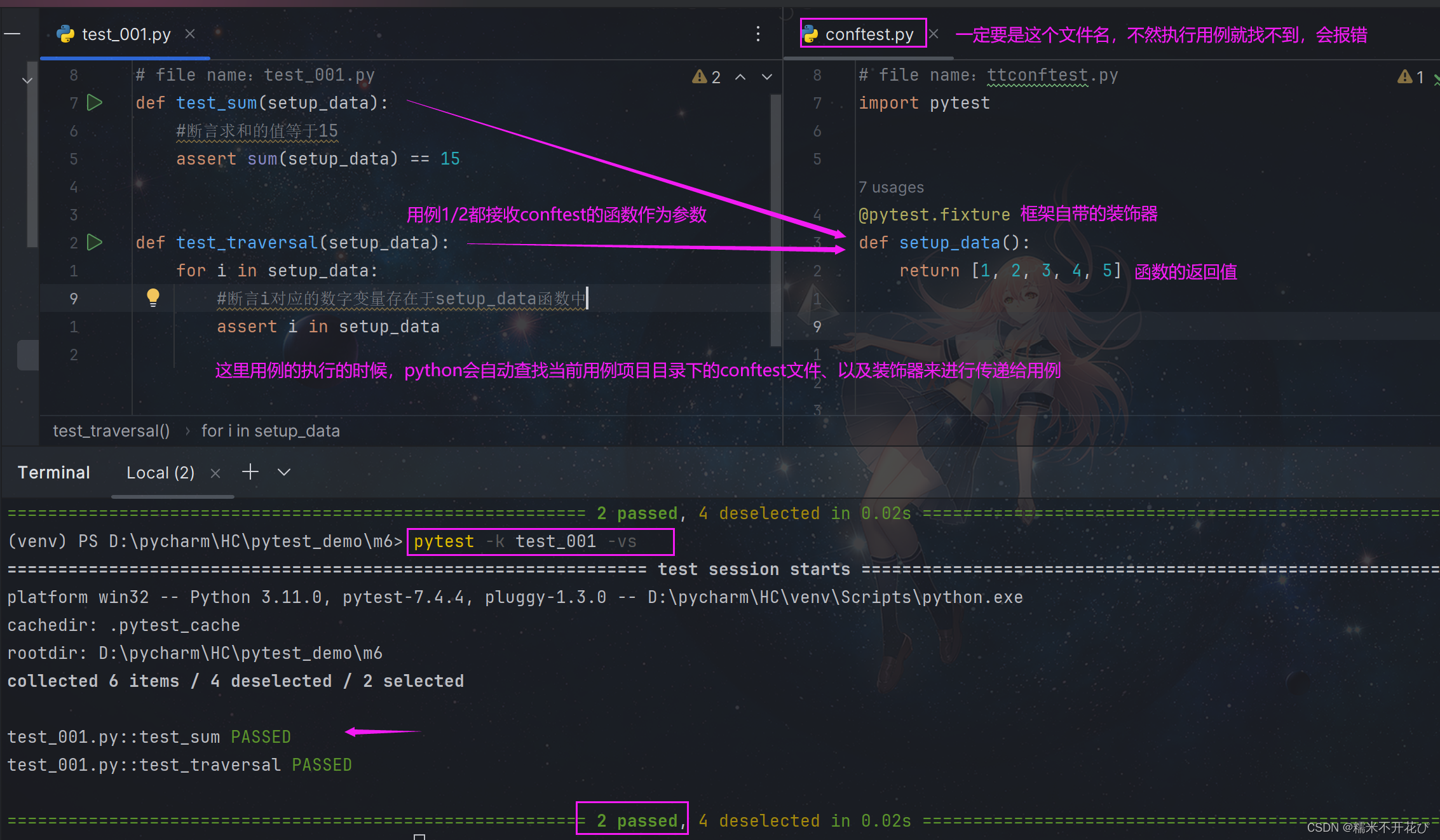
0. 优先查看学习教程 超棒的学习教程 1. yield 语句 yield ptc_udp_clientyield:在 Pytest fixture 中,yield 用于分隔设置和清理代码。yield 之前的代码在测试用例执行前运行,yield 之后的代码在测试用例执行后运行。ptc_udp_client&…...
SIP、SAP、SDP、mDNS、SSH、PTP
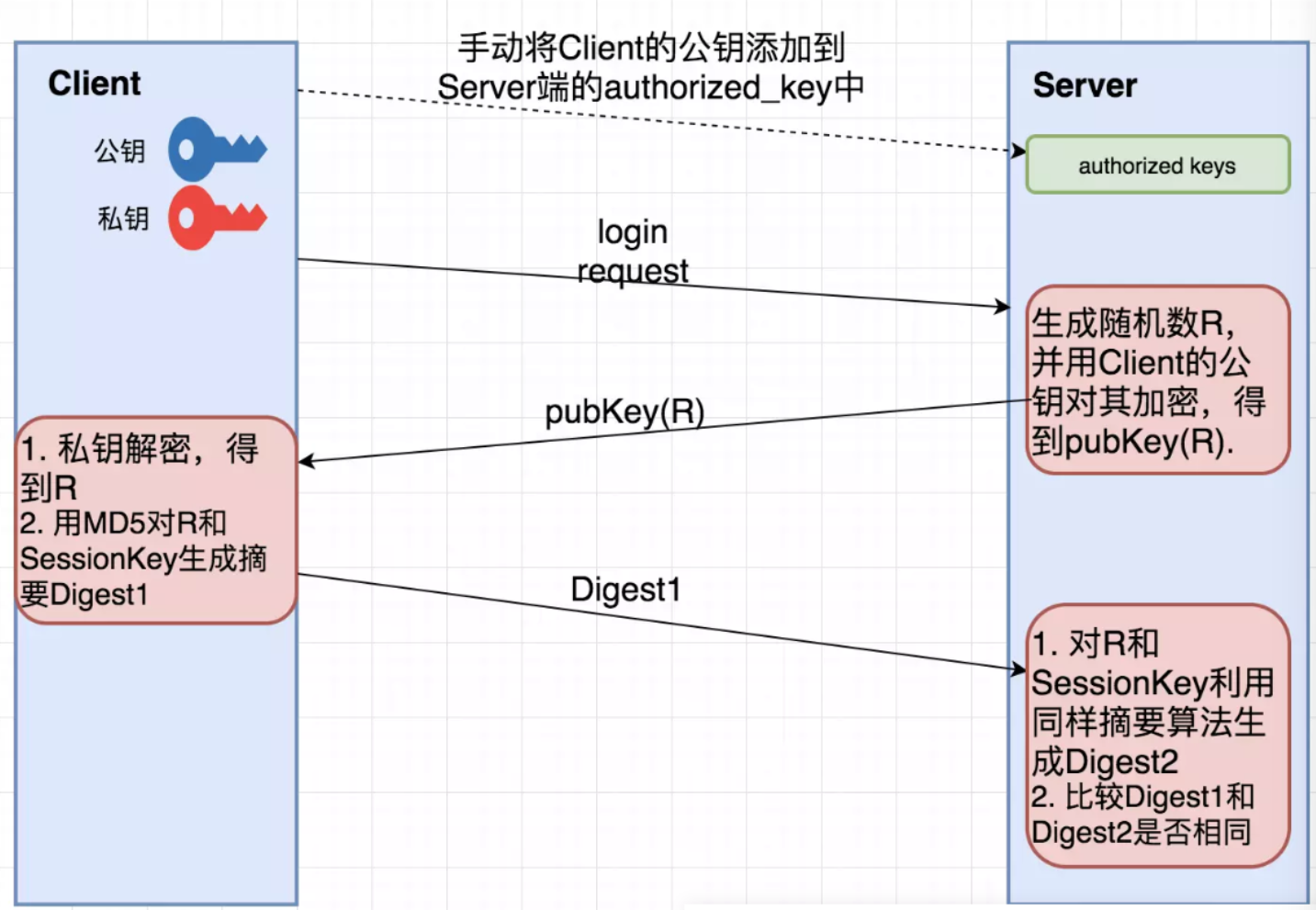
🌈 一、SIP 会话初始协议 会话初始协议 SIP 是一个在 IP 网络上进行多媒体通信的应用层控制协议,它被用来创建、修改和终结 1 / n 个参加者参加的会话进程。SIP 不能单独完成呼叫功能,需要和 RTP、SDP 和 DNS 配合来完成。 1. SIP 协议的功…...

【AI学习笔记】Coze工作流写入飞书多维表格(即:多维表格飞书官方插件使用教程)
背景前摇: 今天遇到一个需求,需要把Coze平台大模型和用户的对话记录保存进飞书表格,这个思路其实不难,因为官方提供了写入飞书表格和多维表格的插件,但是因为平台教程和案例的资料匮乏,依据现有的官方文档…...

System.Threading.Timer 和 System.Timers.Timer
在 .NET 中,System.Threading.Timer 和 System.Timers.Timer 都是用于定时任务的类,但它们的实现方式、使用场景和特性有所不同。以下是它们的 核心区别 和 使用示例: 1. System.Threading.Timer 特点 轻量级,基于线程池…...

在 Windows 系统下配置 VSCode + CMake + Ninja 进行 C++ 或 Qt 开发
在 Windows 系统下配置 VSCode CMake Ninja 进行 C 或 Qt 开发,是一个轻量级但功能强大的开发环境。下面我将分步骤详细说明如何搭建这个开发环境,支持纯 C 和 Qt 项目。 🧰 所需工具安装 1. 安装 Visual Studio Code(VSCode&…...