全球知名具身智能/AI机器人实验室介绍之AI FACTORY基于慕尼黑工业大学
全球知名具身智能/AI机器人实验室介绍之AI FACTORY基于慕尼黑工业大学
TUM AI FACTORY,即KI.FABRIK,是德国慕尼黑工业大学(TUM)在巴伐利亚州推出的一个旗舰项目,旨在打造未来工厂,将传统工厂转变为由人工智能驱动的智能、自适应和敏捷的生产中心。其目标是到2030年,在巴伐利亚地区建立世界上第一个能够通过人工智能实现从单件到批量生产的AI.FACTORY,使工人能够通过AI.PORTALS远程控制机器人完成生产过程,即使在危机时期也能保持经济活动的稳定运行。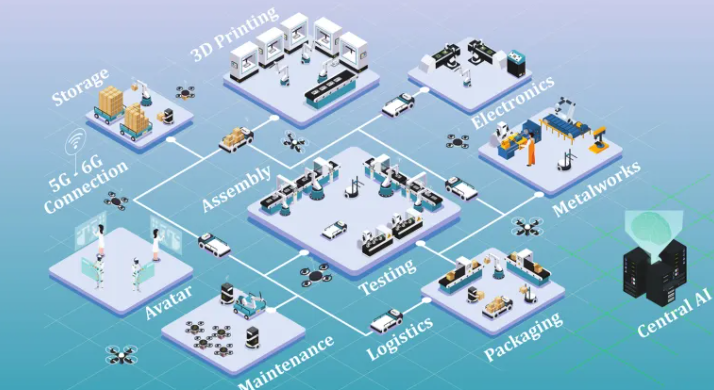
该项目主要设备由20台双臂FRANKA机器人组成,体现了双臂柔性操作的众多优势。Franka机器人中国区域合作商咨询PNP机器人负责,涵盖Franka机器人的培训,渠道和技术支持,支持具身智能/人工智能等方向的实验室建设。
该项目于2020年开始,分为四个部分重叠的阶段进行,部分阶段同时进行。目前正在进行的是第一阶段,即在慕尼黑建立分布式KI.FABRIK的第一个原型,并与精心挑选的合作伙伴公司联合投入运营。KI.FABRIK与以往概念有显著不同,其工厂环境中的中央AI功能可直接与机器人等系统进行物理交互,人类与机器之间的连接也更加直观和透明,例如使用可穿戴技术等。
研究方向
人机协作 :研究如何使人与机器人之间能够更加自然、高效地协作,例如在生产过程中,工人可以通过AI.PORTALS远程控制机器人完成一些复杂的任务,而机器人则可以辅助工人进行重复性或危险性的工作,从而提高生产效率和质量。
智能制造技术 :探索如何利用人工智能、物联网、大数据等先进技术,实现生产过程的智能化和自动化,包括智能排产、质量检测、故障诊断等,以提高生产的灵活性和适应性,满足个性化定制的需求。
机器人技术 :致力于开发具有学习能力和高度适应性的机器人,使其能够通过人工智能算法自我优化和改进,以更好地适应不同的生产任务和环境。例如研究如何提高机器人的运动控制精度、感知能力、决策能力等。
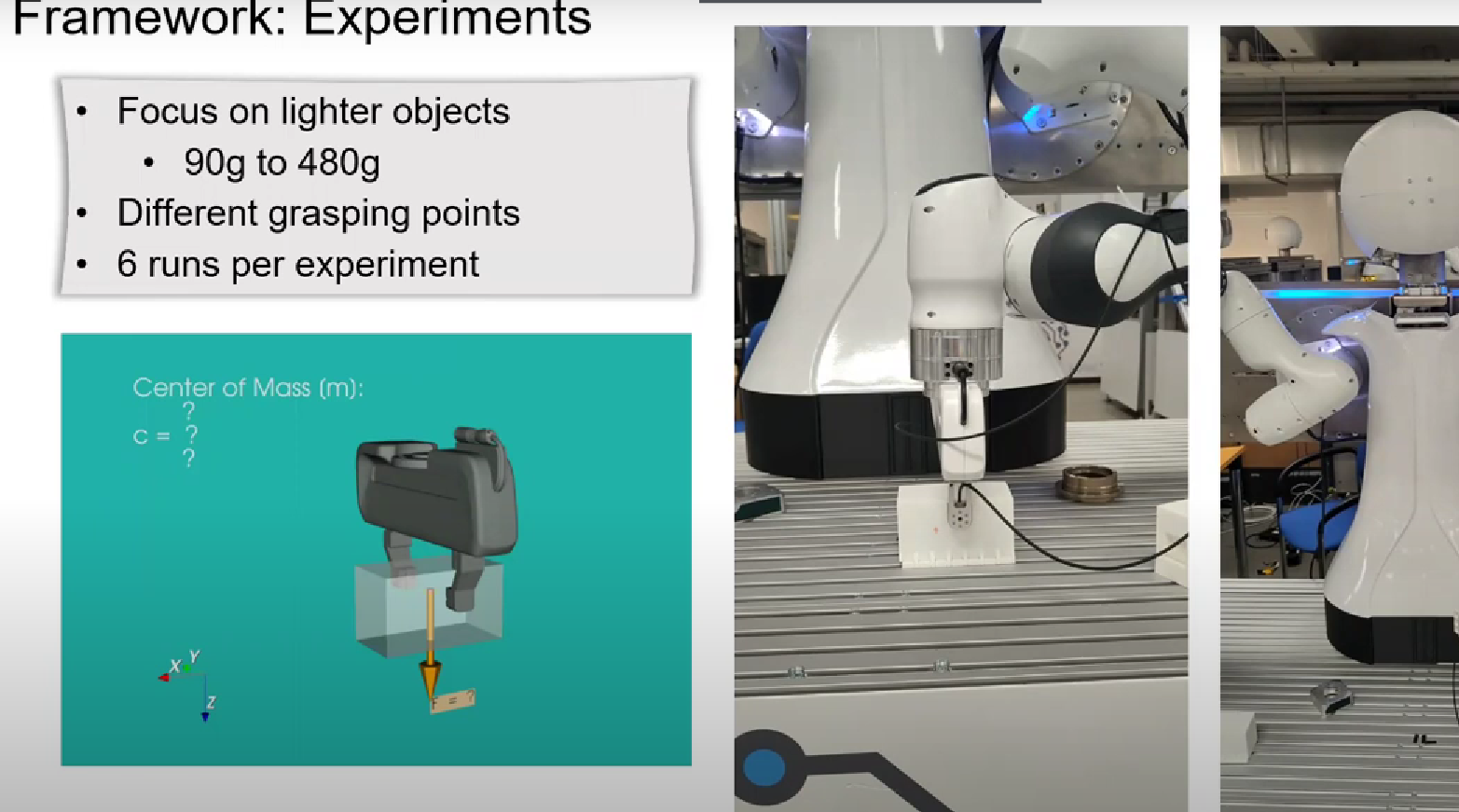
数字孪生技术 :通过创建物理工厂的虚拟副本——数字孪生,实现在虚拟环境中对生产过程进行模拟、优化和预测,从而提高生产的效率和质量,降低成本和风险。在KI.FABRIK中,机器人可以在数字孪生体上进行装配练习,以确定最佳的装配方式。

TUM AI FACTORY中设备
目前有大约20个双臂FRANKA机器人在KI.FABRIK实验室中相互学习,进行电缆和变速器组件的组装等工作
总体方向:
- 25个双臂机器人/每个由AI控制
- 微米公差插入任务
- >100个工业级组件
- 不同的形状和尺寸

每个机器人任务
- 自主学习解决其任务
- 不断分享知识
- 可以获取并传递集体知识
- 柔性部件的智能装配
机器人操作
- 可变形物体的操控(例如电缆)——制造业中常见的、自动化程度不够的流程
- 框架开发——机械臂协作操纵电缆
- 已实现的框架——转移到电缆/线束装配任务的潜力

实时数字孪生
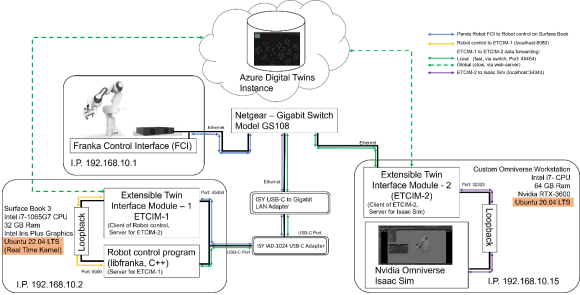
- 使用资产管理外壳、Microsoft Azure 和 Nvidia Omniverse构建工业资产的数字孪生
- 基于套接字通信和 Azure DT 的多功能数字孪生架构
通用机器人技能
- 通过可共享的机器智能知识库,泛化机器人技能,实现灵活的生产线制造。
- 人工智能研讨会旨在构建一个研讨会环境,供用户研究和测试人机协作、力阻抗控制、运动规划和技能学习等主题。
- 用户将体验如何通过触觉技能增强机器人。
机器人看护——从人类观察中学习
- 通过观察学习任务的能力是未来工厂的关键特征,其目标是使高度自动化和智能化的制造系统能够适应不断变化的需求。
- 目标是开发出一种方法,使非专家(就机器人技术而言)人员能够以省时省力的方式重新编程工厂流程。
技能学习
- 通过基于视觉的人体运动追踪,可以通过演示向机器人传授技能。
- 该系统能够分析人类在日常不同环境中的行为,例如,帮助人类完成困难的任务。
AI FACTORY主要设备FRANKA机器人的优势
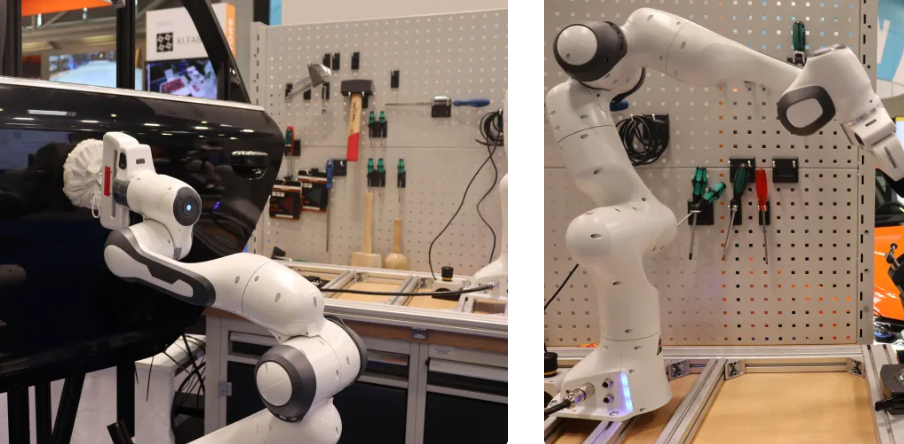
高精度与高灵活性 :FRANK机器人具有7个自由度,重复定位精度高达±0.1mm,能够像人类手臂一样灵活地运动,轻松完成复杂的操作任务,如多角度拧紧、多阶段推注等,其效率较传统方案提升300%。
先进的力控技术 :内置高精度的力矩传感器和1kHz力控带宽,可实时感知接触力的大小和方向,并将这些信息实时传递给操作员,使操作员能够通过VR/AR“触摸”远程环境。同时,具备医疗级柔顺性,力控精度可达±0.01mm,如在手术中可动态适配人体组织等脆弱对象,将手术失误率下降85%,安全系数超行业标准3倍。
强大的人机协作能力 :专为与人类协作而设计,安全性极高。它能够通过先进的传感器和算法实时检测人类的存在,并在必要时自动减速或停止运动,有效保障了人类工人的安全。
高度的可编程性和适应性 :支持多种编程语言和开发环境,如ROS、MATLAB等,开发者可通过C++接口libfranka直接调用底层功能,开发周期缩短60%。此外,还具备模块化即插即用的特点,末端工具标准化,支持快速切换夹爪/焊枪/手术器械等,可根据不同的应用场景进行快速调整和部署。
AI FACTORY为什么要使用FRANKA机器人双臂 :
协同作业能力 :双臂FRANK机器人可以像人类双手一样协同工作,完成复杂的任务。例如,在精密装配任务中,一个手臂可以固定零件,而另一个手臂可以进行拧紧或焊接操作;在物流搬运中,双臂可以共同搬运大型或重型物体,提高搬运效率和稳定性。
更高的灵活性和适应性 :双臂机器人具有更高的灵活性和适应性,能够轻松地在不同的工作场景中切换,完成多种任务。例如,在一个智能工厂中,双臂FRANK机器人可以在一个工作站上完成精密装配任务,然后移动到另一个工作站进行物料搬运或质量检测等。
增强的感知和交互能力 :双臂FRANK机器人配备了先进的传感器和感知系统,如视觉传感器、力传感器等,能够实时感知周围环境的变化,并根据这些变化调整自己的行为。例如,在一个动态的生产环境中,双臂机器人可以感知到工人的位置和动作,以及物体的位置和状态,从而自动调整运动轨迹,避免碰撞和干扰,实现更加自然和高效的交互。
其他设备 :除了FRANK机器人外,TUM AI FACTORY还配备了其他一些先进的设备和系统,如用于创建数字孪生体的建模软件和计算平台、用于数据采集和分析的传感器网络和大数据处理系统、以及支持远程控制和协作的可穿戴设备等。
未来AI智能工厂趋势
高度智能化 :未来智能工厂将以人工智能为核心,实现生产过程的高度智能化和自动化。机器学习、深度学习等人工智能技术将广泛应用于生产过程的各个环节,如预测性维护、质量检测、智能调度等,以提高生产的效率和质量,降低生产成本。
灵活性和适应性 :随着市场需求的日益多样化和个性化,未来智能工厂需要具备高度的灵活性和适应性,能够快速响应市场变化和客户需求。通过采用先进的机器人技术和模块化生产系统,工厂可以轻松地调整生产流程和产品配置,实现小批量、多品种的生产模式。
人机协作的深化 :人机协作将成为未来智能工厂的重要特征之一。机器人将不再是简单的工具,而是与人类工人共同工作的伙伴。通过 intuitive 的界面和自然的交互方式,人类工人可以与机器人进行更加紧密和高效的合作,充分发挥各自的优势,共同完成复杂的生产任务。

AI FACTORY未来规划
慕尼黑工业大学(TUM)推出的 KI.FABRIK(人工智能工厂)项目,代表了未来智能制造的前沿方向。该项目以人工智能(AI)为核心,融合了双臂机器人、数字孪生、可穿戴技术等先进技术,旨在打造一个灵活、高效、人机协作的生产环境。其中,FRANKA Emika 的双臂机器人在实现高精度、柔性制造方面发挥了关键作用。
KI.FABRIK 是 TUM 机器人与机器智能研究所(MIRMI)主导的旗舰项目,旨在建立一个完全灵活、互联的生产基地,用于本地、经济地生产最先进的 IT 和机电高科技组件。该项目计划于 2030 年前完成原型工厂的建设 项目的核心理念是通过 AI 技术,实现机器人与人类的直接物理交互,以及通过可穿戴技术实现人机之间的直观和透明的连接 。这标志着从传统的“自动化”向“智能化”制造的转变。
PNP机器人原创,转载请申请授权。
相关文章:
全球知名具身智能/AI机器人实验室介绍之AI FACTORY基于慕尼黑工业大学
全球知名具身智能/AI机器人实验室介绍之AI FACTORY基于慕尼黑工业大学 TUM AI FACTORY,即KI.FABRIK,是德国慕尼黑工业大学(TUM)在巴伐利亚州推出的一个旗舰项目,旨在打造未来工厂,将传统工厂转变为由人工智…...
DASCTF
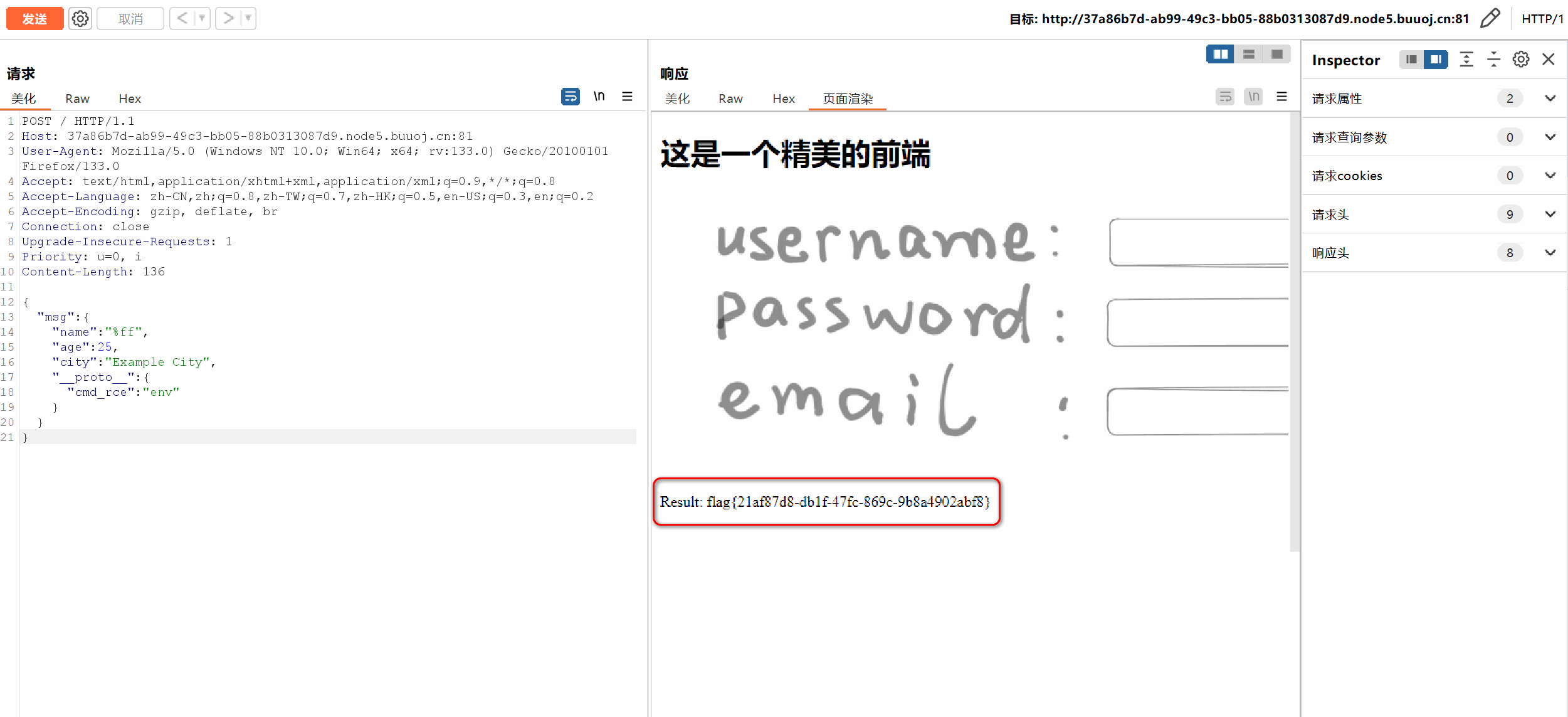
[DASCTF X 0psu3十一月挑战赛|越艰巨越狂热]EzPenetration Tip:数据库里的邮箱key已更改为管理员密码,拿到后可直接登录 打开靶机,用Wappalyzer分析网站,可以看到管理系统是Wordpress,因此可以尝试用WPSSCAN扫描公开…...
)
钉钉 - 机器人消息推送(签名版)
前言 在日常生活中,我们可能会遇到某些异常发生后需要紧急通知到群里,让相关人员看到紧急处理的事件触发机制。 消息群我采用的是钉钉推送,本文介绍了如何用php 推送钉钉机器人消息。 源码封装 <?php /*** 钉钉通知 - 签名版*/ class …...

Redux 实践与中间件应用
Redux 异步处理的挑战 Redux 核心设计是同步的、单向数据流,但现代应用中异步操作无处不在。Redux 中间件填补了这一缺口,专门解决异步流程管理、副作用隔离等复杂场景。 中间件架构原理 中间件位于 action 被发起之后、到达 reducer 之前,…...

ModBus总线协议
一、知识点 1. 什么是Modbus协议? Modbus 是一种工业通信协议,最早由 Modicon 公司在1979年提出,目的是用于 PLC(可编程逻辑控制器)之间的数据通信。它是主从式通信,即一个主机(主设备…...
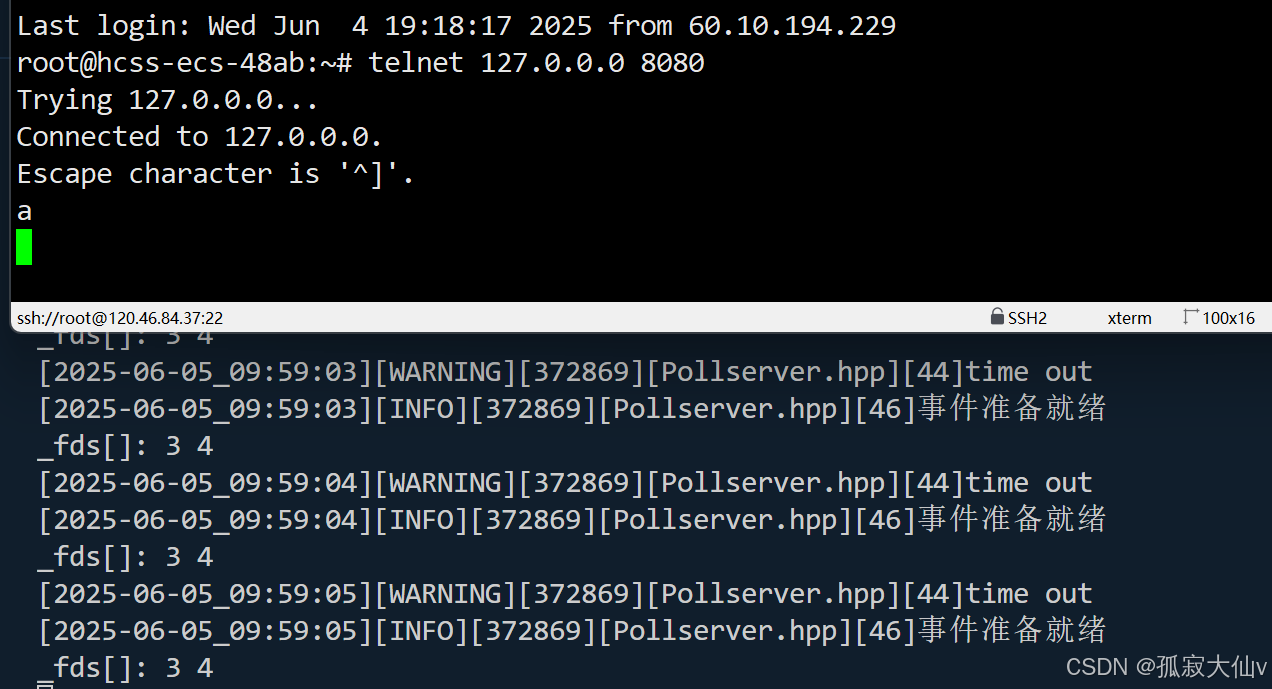
【计算机网络】非阻塞IO——poll实现多路转接
🔥个人主页🔥:孤寂大仙V 🌈收录专栏🌈:计算机网络 🌹往期回顾🌹:【计算机网络】非阻塞IO——select实现多路转接 🔖流水不争,争的是滔滔不息 一、…...

在.NET Core控制器中获取AJAX传递的Body参数
.Net Core是支持前后端不分离式的开发的,如果在原始系统中采用不分离式开发,后面需要在原系统中增加功能,并且新的服务采用其他语言开发,且系统原来功能保持原样,这样前端系统可以单独调用新开发的接口。 但是&#x…...

snprintf函数用法及注意事项详解
当 format 后没有可变参数(即 ... 为空)时,va_start 的行为和后续操作如下: 1. va_start 的行为 va_start 的核心任务是根据最后一个固定参数(format)的地址,计算可变参数列表的起始位置。即使…...
)
vue-20(Vuex 状态管理的最佳实践)
Vuex 状态管理的最佳实践 Vuex 是管理大型 Vue.js 应用状态的一个强大工具,但其有效性取决于其组织和维护的质量。管理不善的 Vuex 存储可能会变得难以控制、难以调试,并成为性能瓶颈。本课程深入探讨构建 Vuex 存储的最佳实践,重点关注可维…...

DAX权威指南8:DAX引擎与存储优化
文章目录 十七、DAX引擎17.1 DAX 引擎的体系结构17.1.1 表格模型的双引擎架构17.1.2 存储引擎的三种模式17.1.2.1 VertiPaq引擎17.1.2.2 DirectQuery 引擎17.1.2.3 对比与最佳实践 17.1.3 数据刷新 17.2 理解 VertiPaq 存储引擎17.2.1 列式数据库17.2.2 VertiPaq 压缩17.2.2.1 …...

智慧货运飞船多维度可视化管控系统
图扑搭建智慧货运飞船可视化系统,借数字孪生技术,高精度复刻货运飞船外观、结构与运行场景。整合多维度数据,实时呈现飞行状态、设备参数等信息,助力直观洞察货运飞船运行逻辑,为航天运维、任务推演及决策提供数字化支…...

电脑开不了机,主板显示67码解决过程
文章目录 现象分析内存条问题BIOS设置问题其它问题 解决清理内存条金手指所需工具操作步骤注意事项 电脑在运行过程中,显示内存不足,重启电脑却无法启动。 现象 System Initialization 主板风扇是转的,也有灯光显示,插上屏幕&am…...

Spring Boot 类加载机制深度解析
Spring Boot 类加载机制深度解析 前言 在 Java 应用开发中,类加载机制是一个重要且复杂的话题。Spring Boot 作为现代 Java 开发的主流框架,其类加载机制更是值得深入了解。本文将从基础概念到实际应用,全面解析 Spring Boot 的类加载机制。…...

Python 训练营打卡 Day 45
TensorBoard 简单来说,TensorBoard 是 TensorFlow 自带的一个「可视化工具」,就像给机器学习模型训练过程装了一个「监控屏幕」。你可以用它直观看到训练过程中的数据变化(比如损失值、准确率)、模型结构、数据分布等,…...

自托管图书搜索引擎Bookologia
简介 什么是 Bookologia ? Bookologia 是一个专门的书籍搜索引擎,可以在几秒钟内找到任何书籍。它是开源的,可以轻松自托管在 Docker 上,为用户提供一个简单而高效的书籍查找体验。 主要特点 简洁的用户界面:界面设计…...
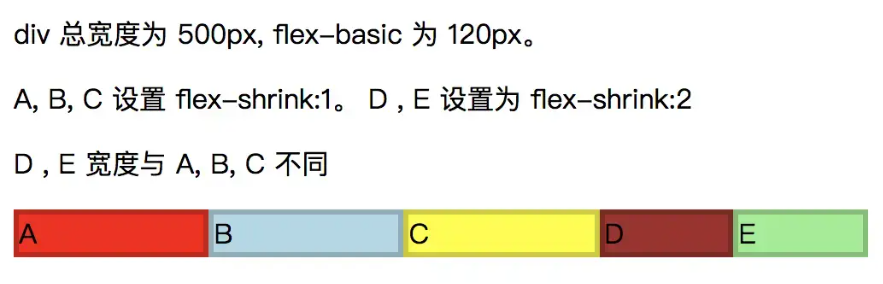
前端flex、grid布局
flex布局 弹性布局是指通过调整其内元素的宽高,从而在任何的显示设备上实现对可用显示空间最佳填充的能力。弹性容器扩展其内元素来填充可用空间,或将其收缩来避免溢出 简单来说,弹性盒子模型,是为了你的网页可以在不同分辨率设…...
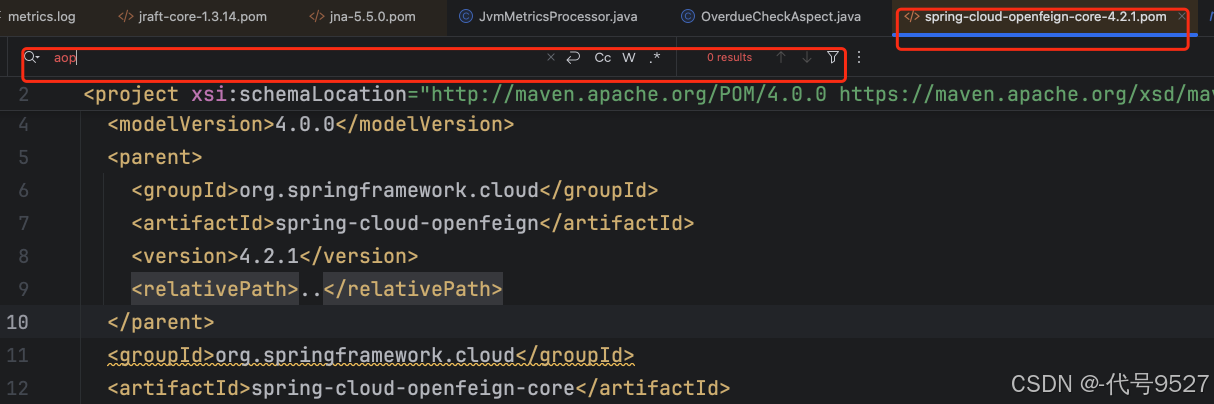
Maven相关问题:jna版本与ES冲突 + aop失效
文章目录 1、背景2、解决3、一点思考4、环境升级导致AOP失效5、okhttp Bean找不到6、总结 记录一些Maven依赖相关的思考 1、背景 做一个监控指标收集,用一下jna依赖: <dependency><groupId>net.java.dev.jna</groupId><artifact…...
Tomcat全方位监控实施方案指南
#作者:程宏斌 文章目录 一.二进制部署1、安装包信息2、新建配置文件2.1 配置config.yaml文件2.2 上传jar包 3、修改配置3.1 备份3.2 修改bin目录下的startup.sh文件 4、重启tomcat5、访问测试 二.docker部署1、临时方案1.1、重新启动容器1.2…...

开源PHP在线客服系统源码搭建教程
在当今数字化时代,在线客服系统已成为企业与客户沟通的重要桥梁。开源PHP客服系统因其灵活性、低成本和高可定制性而受到众多企业的青睐。本文将介绍几款优秀的开源PHP客服系统,并提供详细的搭建教程。 演示网站:gofly.v1kf.com 1.1 主流开源…...

centos7升级glibic-2.28
centos7升级glibic-2.28 最近使用trae连接服务器的时候,提示远程系统不兼容: Trae CN需要glibc 2.28或更高版本。检测到的版本: 2.17。下面是升级步骤。centos7默认的glibc不支持node v18及以上。 1、进入/home/download目录(没有download,则新建一个)…...

在Docker里面运行Docker
Docker 凭借其轻量级和可移植的容器,无疑改变了软件开发和部署的世界。但如果我告诉你 Docker 本身可以在另一个 Docker 容器中运行,你会怎么想?没错!这个概念通常被称为“Docker Inside Docker”或“DinD”,它为开发人员和系统管理员开辟了一个全新的可能性领域。在这篇博…...

设计模式复习小结
1.容易忘得设计原则 接口隔离:指接口中的功能太杂则可以拆分一下。防止实现类实现了接口后自动依赖了一些不需要的功能。不同功能拆分成不同的接口。 里氏代换:强调父类能出现的地方,子类一定能正常跑。 迪米特法则:又称最少知…...
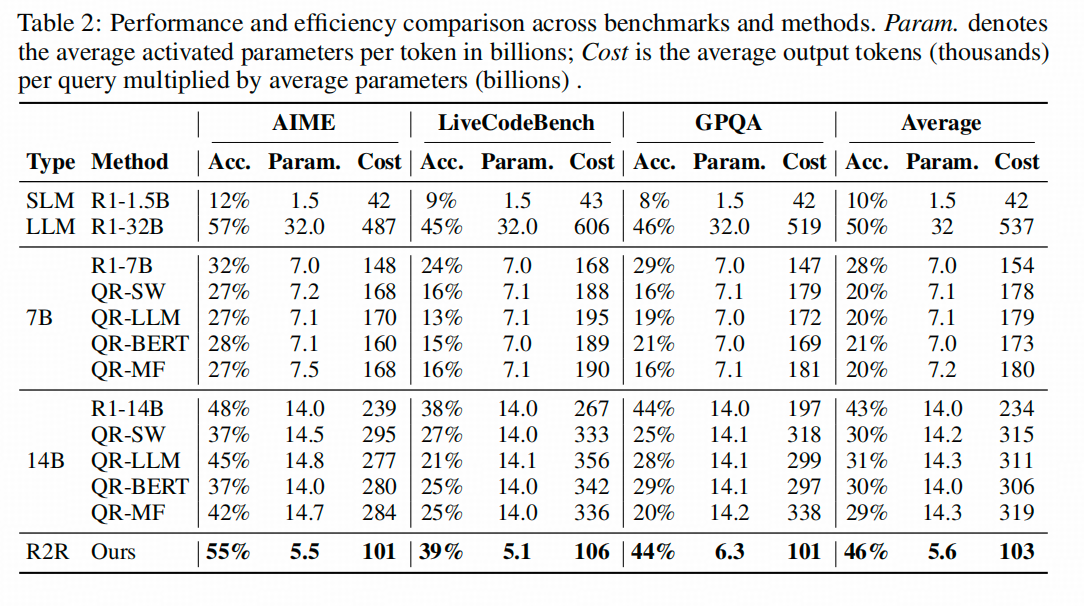
To be or Not to be, That‘s a Token——论文阅读笔记——Beyond the 80/20 Rule和R2R
本周又在同一方向上刷到两篇文章,可以说,……同学们确实卷啊,要不卷卷开放场域的推理呢? 这两篇都在讲:如何巧妙的利用带有分支能力的token来提高推理性能或效率的。 第一篇叫 Beyond the 80/20 Rule: High-Entropy Mi…...

【基础】每天掌握一个Linux命令 - awk
目录 【基础】每天掌握一个Linux命令 - awk一、工具概述二、安装方式Ubuntu/Debian系统:CentOS/RHEL系统:macOS系统: 三、核心功能四、基础用法基本语法常用选项内置变量基本操作示例1. 打印文件所有内容2. 打印每行的第一个字段3. 指定分隔符…...

《UE5_C++多人TPS完整教程》学习笔记37 ——《P38 变量复制(Variable Replication)》
本文为B站系列教学视频 《UE5_C多人TPS完整教程》 —— 《P38 变量复制(Variable Replication)》 的学习笔记,该系列教学视频为计算机工程师、程序员、游戏开发者、作家(Engineer, Programmer, Game Developer, Author)…...
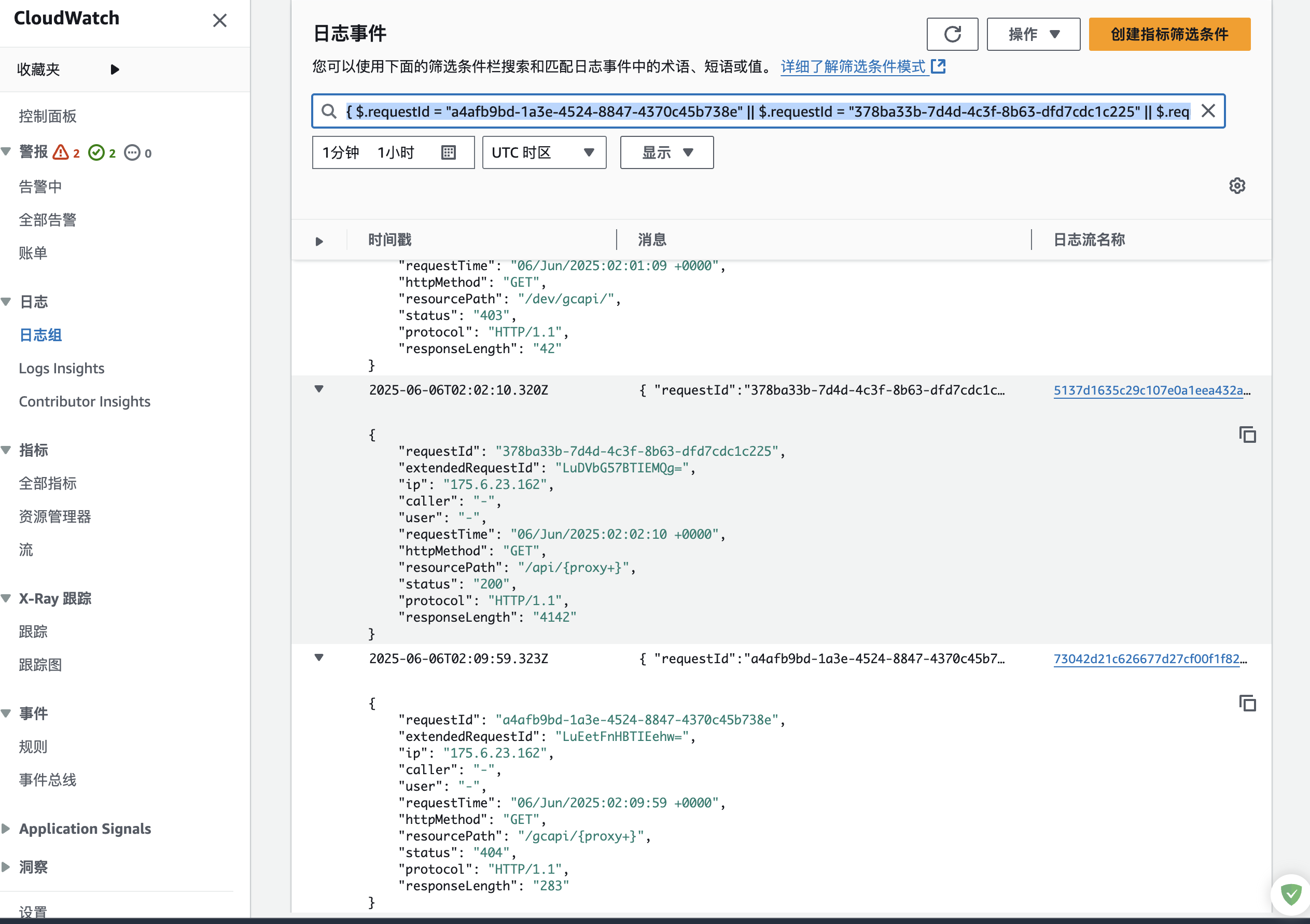
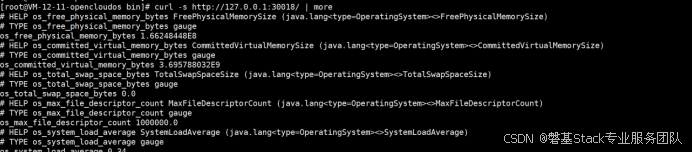
AWS API Gateway配置日志
问题 访问API Gateway接口出现了403问题,具体报错如下: {"message":"Missing Authentication Token"}需要配置AWS API Gateway日志,看请求过程是什么样子的。 API Gateway 先找到API Gateway的的日志角色,…...

Towards Open World Object Detection概述(论文)
论文:https://arxiv.org/abs/2103.02603 代码:https://github.com/JosephKJ/OWOD Towards Open World Object Detection 迈向开放世界目标检测 Abstract 摘要 Humans have a natural instinct to identify unknown object instances in their environ…...

轻松备份和恢复 Android 系统 | 4 种解决方案
我们通常会在 Android 手机上存储大量重要的个人数据,包括照片、视频、联系人、信息等等。如果您不想丢失宝贵的数据,可以备份 Android 数据。当您需要访问和使用这些数据时,可以将其恢复到 Android 设备。如果您想了解 Android 备份和恢复&a…...
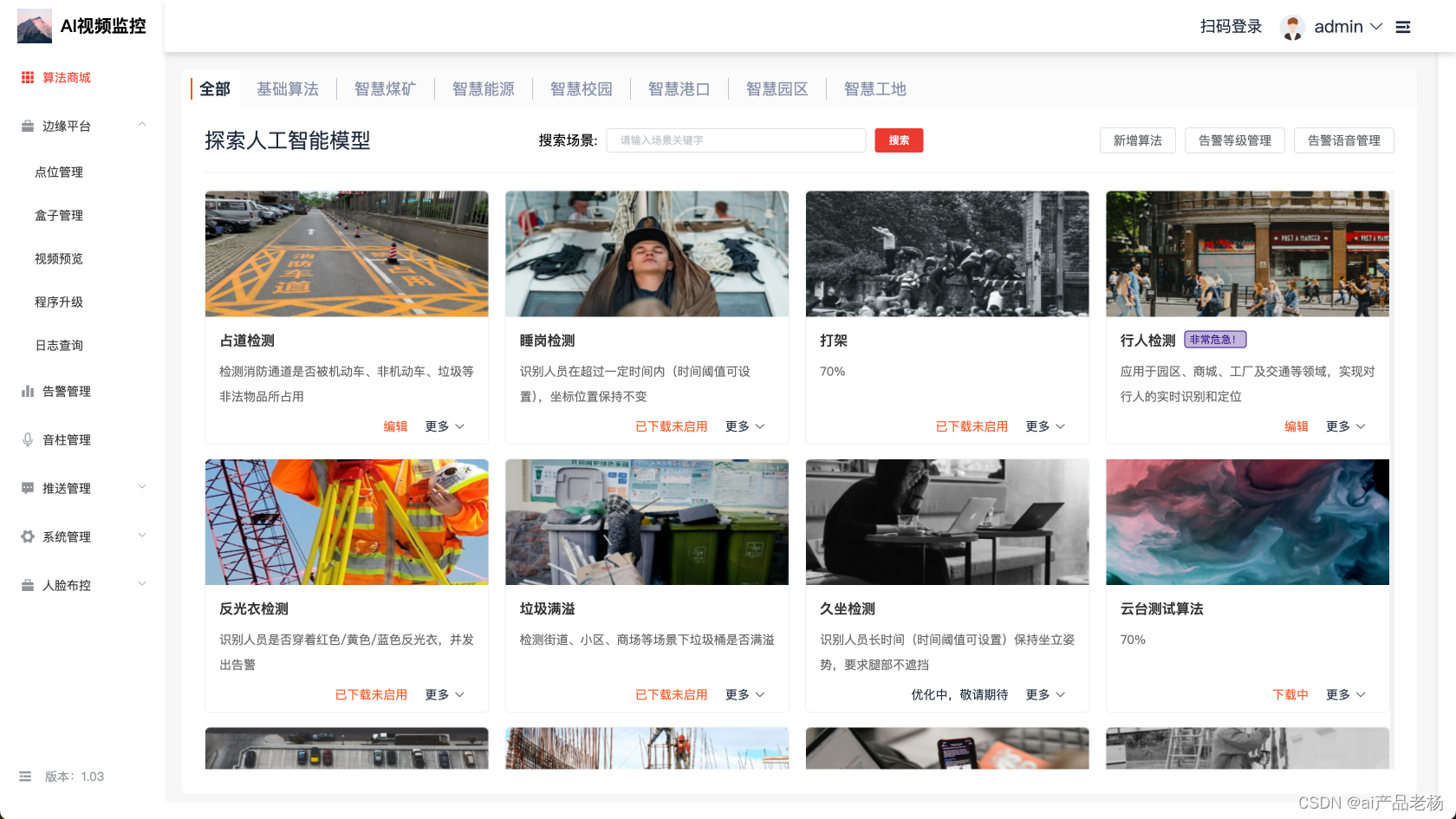
具备强大的数据处理和分析能力的智慧地产开源了
智慧地产视觉监控平台是一款功能强大且简单易用的实时算法视频监控系统。它的愿景是最底层打通各大芯片厂商相互间的壁垒,省去繁琐重复的适配流程,实现芯片、算法、应用的全流程组合,从而大大减少企业级应用约95%的开发成本。 AI是新形势下数…...

RK3588和FPGA桥片之间IO电平信号概率性不能通信原因
1.GPIO管脚配置问题 RK3588对IO进行配置的时候,如果配置为多功能复用,没有明确IO功能,可能引起信号接收不稳定, 需要在驱动中设备树中配置管脚为GPIO功能,确保没有功能复用的干扰。 2.上下拉电阻阻值设置不当 GPIO引脚…...