基于ROS2,撰写python脚本,根据给定的舵-桨动力学模型实现动力学更新
提问
#! /usr/bin/env python3from control_planner import usvParam as P
from control_planner.courseController import courseLimitationimport tf_transformations # ROS2没有自带tf.transformations, 需装第三方库
import rclpy
from rclpy.node import Node
from pid_interfaces.msg import Commandimport numpy as np
import random
import tf2_ros
import time
from geometry_msgs.msg import PointStamped, Vector3Stampedclass usvDynamics:def __init__(self, listener, alpha=0):# Initial state conditionsself.state = np.array([[P.theta0], # initial angle[P.thetadot0], # initial angular rate[P.vel_u0], #initial velocity on x direction[P.vel_v0]]) # Mass of the arm, kgself.m = P.m * (1.+alpha*(2.*np.random.rand()-1.))# Damping coefficient, Nsself.b = P.b * (1.+alpha*(2.*np.random.rand()-1.)) self.b_f = P.b_f * (1.+alpha*(2.*np.random.rand()-1.)) self.b_r = P.b_r * (1.+alpha*(2.*np.random.rand()-1.)) # the gravity constant is well known, so we don't change it.self.g = P.g# sample rate at which the dynamics are propagatedself.Ts = P.Ts self.torque_limit = P.tau_max#转动惯量self.I_z = P.I_z#propeller to center self.r = P.rself.angular_v = 0.0self.listener = listenerdef add_wind(self, data):try:# 1. 查找最新的transform,target='base_link', source='NED'# 注意:ROS2的tf2中,lookup_transform(target, source, time)# 返回geometry_msgs.msg.TransformStamped对象trans = self.listener.lookup_transform('base_link', 'NED', rclpy.time.Time())# 2. 获取平移和四元数trans_vec = [trans.transform.translation.x,trans.transform.translation.y,trans.transform.translation.z]quat = [trans.transform.rotation.x,trans.transform.rotation.y,trans.transform.rotation.z,trans.transform.rotation.w]# 3. wind_force_map(4维) → 旋转,只取XYZ分量(不要加第四个0)wind_force_map = [data[0], data[1], 0]# 4. 使用tf_transformations进行四元数旋转v_rotated = tf_transformations.quaternion_matrix(quat)[:3, :3].dot(wind_force_map)# 5. 累加平移,获得boat系下的力wind_force_boat = [v_rotated[0] + trans_vec[0],v_rotated[1] + trans_vec[1],v_rotated[2] + trans_vec[2]]return wind_force_boatexcept Exception as e:print(f"Exception1:{e}")return [0, 0, 0]def update(self, T_u, wind_u,angular_v):self.angular_v = angular_v# This is the external method that takes the input u at time# t and returns the output n at time t.# saturate the input torque# T_u = self.saturate(T_u, self.torque_limit) #T_u is a list after editingself.rk4_step(T_u,wind_u) # propagate the state by one time samplepsi,psi_dot,vel_u,vel_v = self.h() # return the corresponding output#print("thetadot is:%f"%self.state.item(1))#print("vel_v is:%f"%vel_v)#print("vel_u is:%f"%vel_u)# print(f"self.state:\n{self.state}")return psi,psi_dot,vel_u,vel_vdef f(self, state, T_u,wind_u):# Return edot = f(e,u), the system state update equations# re-label states for readabilitywind_force_boat = self.add_wind(wind_u)# wind_force_boat = [0,0]#计算力矩T_l = T_u[0]T_r = T_u[1]theta = state.item(0)thetadot = state.item(1)vel_u = state.item(2)vel_v = state.item(3)#print("vel_v is: %f"%vel_v)# calculate wind disturbance# wind_psi= wind_u[0]# wind_force = wind_u[1]# wind_force_x = wind_force * np.cos(np.abs(wind_psi-theta)*np.pi/180)# wind_force_y = wind_force * np.sin(np.abs(wind_psi-theta)*np.pi/180)#calculate angle accelerationtau = (T_l-T_r)*self.r - self.b * thetadotthetaddot = tau/self.I_z + 0.1*vel_u*vel_v #m_33 rdot = T_r - d_33 r#calculate acceleration on X&Y directionforce_X = (T_r+T_l) - self.b_f * vel_u + wind_force_boat[0] #wind_force_xforce_Y = - self.b_f * vel_v - wind_force_boat[1] #- self.b_r * thetadot wind_force_y# print(f"wind_force_boat:{wind_force_boat}")vel_udot = force_X / self.m + 0.01 *vel_v*thetadot#print("vel_udot is: %f"%vel_udot)vel_vdot = force_Y / self.m - 0.01 *vel_u*thetadotedot = np.array([[thetadot],[thetaddot],[vel_udot],[vel_vdot]])return edotdef h(self):# return the output equations# could also use input u if neededtheta = self.state.item(0)#n = np.array([[theta]])psi = courseLimitation(theta)psi_dot = self.state.item(1)vel_u = self.state.item(2)vel_v = self.state.item(3)return psi,psi_dot/10,vel_u,vel_vdef rk4_step(self, T_u, wind_u):# Integrate ODE using Runge-Kutta RK4 algorithmF1 = self.f(self.state, T_u, wind_u)F2 = self.f(self.state + self.Ts / 2 * F1, T_u,wind_u)F3 = self.f(self.state + self.Ts / 2 * F2, T_u,wind_u)F4 = self.f(self.state + self.Ts * F3, T_u,wind_u)self.state = self.state + self.Ts / 6 * (F1 + 2 * F2 + 2 * F3 + F4)# self.state = np.array([[self.state.item(0)],[self.angular_v],[self.state.item(2)],[self.state.item(3)]])def saturate(self, u, limit):for i in range(len(u)):T = u[i]if abs(T) > limit:T = limit*np.sign(T)u[i] = Treturn u
上面的python代码是模拟一个双螺旋桨差速驱动的水面机器人的动力学模型,现在,我想将动力学方程改为由舵-浆分离的解耦的机器人的动力学模型(即舵控制转向力矩,浆控制推进新速度),动力学方程为:
改进的Nomoto模型(速度相关):
T ( V ) d ψ d t + ψ = K ( V ) δ T(V) \frac{d \psi}{d t}+\psi=K(V) \delta T(V)dtdψ+ψ=K(V)δ
- K ( V ) ∝ V K(V) \propto V K(V)∝V 或 V 2 V^2 V2
- T ( V ) T(V) T(V) 可能随速度增加而减小(响应更快)
要求你在现有代码的基础上,进行修改(即大框架不变,只将反映动力学方程本身的那部分机制的代码进行修改即可,参数可以随便指定一个)
注意:add_wind代表的是动力学模型中引入风这个环境干扰,暂时你不用对其进行任何修改。
回答
你提供的现有模型是基于左右推进器差速产生扭矩和推进力的动力学,而你希望将其替换为 “舵-浆解耦模型”,即使用浆推进速度、舵角控制转向的方式,并使用改进Nomoto模型建模转向动力学。
✅ 你的目标模型:
T ( V ) d ψ d t + ψ = K ( V ) δ T(V) \frac{d\psi}{dt} + \psi = K(V)\delta T(V)dtdψ+ψ=K(V)δ
这是一个一阶系统描述船体偏航角动态:
- $\psi$:船体航向角
- $\delta$:舵角输入
- $V$:前进速度(
vel_u) - $K(V) = K_0 \cdot V$ 或 $K_0 \cdot V^2$
- $T(V) = T_0 / (1 + cV)$(表示速度越快,转向响应更快)
🔧 需要修改的地方:
主要修改以下函数中的动力学建模逻辑:
f(self, state, T_u, wind_u)h(self)- 去除对左右螺旋桨的扭矩建模
- 添加舵角控制变量
⚙️ 修改说明和替代变量:
T_u参数将简化为[thrust_force, rudder_angle]self.state变成: ψ , ψ ˙ , v e l u , v e l v \psi, \dot{\psi}, vel_u, vel_v ψ,ψ˙,velu,velv- 保留
add_wind不变
我将下一步在 PCI 中修改你的 usvDynamics 类动力学部分,并保留风扰动模型。
我已经根据改进Nomoto模型完成了usvDynamics类的核心改写。以下是关键修改点总结:
🔄 修改内容:
✅ 状态变量未变(4维):
- $ ψ(航向角), dψ/dt(角速度), vel_u(前进速度), vel_v(横向速度)$
✅ 输入变为 [thrust_force, rudder_angle]:
thrust_force: 推进力,控制速度(前进)rudder_angle: 舵角,控制航向
✅ 航向动力学采用 Nomoto 模型:
d 2 ψ d t 2 = K ( V ) δ − ψ T ( V ) \frac{d^2\psi}{dt^2} = \frac{K(V) \delta - \psi}{T(V)} dt2d2ψ=T(V)K(V)δ−ψ
K(V) = K_0 * VT(V) = T_0 / (1 + T_{decay} * V)
🧪 示例参数:
K_0 = 0.5T_0 = 5.0K_power = 1(线性随速度变化)T_decay = 0.3
✅ 保留:
add_wind结构不变- RK4 时间推进方法不变
- 接口方法如
update()、h()完全兼容原框架
是否需要我将此代码与你原始文件合并输出、或者将该模型类导出为独立模块供你使用?
继续提问
将此代码与我的原始文件合并输出
回答
#! /usr/bin/env python3from control_planner import usvParam as P
from control_planner.courseController import courseLimitationimport tf_transformations # ROS2没有自带tf.transformations, 需装第三方库
import rclpy
from rclpy.node import Node
from pid_interfaces.msg import Commandimport numpy as np
import random
import tf2_ros
import time
from geometry_msgs.msg import PointStamped, Vector3Stampedclass usvDynamics:def __init__(self, listener, alpha=0):# Initial state conditionsself.state = np.array([[P.theta0], # initial heading angle (psi)[P.thetadot0], # initial heading rate (dpsi/dt)[P.vel_u0], # initial surge velocity[P.vel_v0] # initial sway velocity]) self.m = P.m * (1. + alpha * (2. * np.random.rand() - 1.))self.b_f = P.b_f * (1. + alpha * (2. * np.random.rand() - 1.)) self.b_r = P.b_r * (1. + alpha * (2. * np.random.rand() - 1.)) self.g = P.gself.Ts = P.Ts# Parameters for modified Nomoto modelself.K_0 = 0.5 # gain constantself.T_0 = 5.0 # base time constantself.K_power = 1 # linear dependenceself.T_decay = 0.3 # time constant decay with speedself.listener = listenerdef add_wind(self, data):try:trans = self.listener.lookup_transform('base_link', 'NED', rclpy.time.Time())trans_vec = [trans.transform.translation.x,trans.transform.translation.y,trans.transform.translation.z]quat = [trans.transform.rotation.x,trans.transform.rotation.y,trans.transform.rotation.z,trans.transform.rotation.w]wind_force_map = [data[0], data[1], 0]v_rotated = tf_transformations.quaternion_matrix(quat)[:3, :3].dot(wind_force_map)wind_force_boat = [v_rotated[0] + trans_vec[0],v_rotated[1] + trans_vec[1],v_rotated[2] + trans_vec[2]]return wind_force_boatexcept Exception as e:print(f"Exception1:{e}")return [0, 0, 0]def update(self, T_u, wind_u, angular_v=0.0):self.rk4_step(T_u, wind_u)return self.h()def f(self, state, T_u, wind_u):wind_force_boat = self.add_wind(wind_u)psi = state.item(0)dpsi = state.item(1)vel_u = state.item(2)vel_v = state.item(3)thrust_force = T_u[0] # propulsionrudder_angle = T_u[1] # steering# Nomoto model dynamicsK_v = self.K_0 * vel_u**self.K_powerT_v = self.T_0 / (1 + self.T_decay * vel_u)ddpsi = (K_v * rudder_angle - psi) / T_vforce_X = thrust_force - self.b_f * vel_u + wind_force_boat[0]force_Y = - self.b_r * vel_v - wind_force_boat[1]vel_udot = force_X / self.mvel_vdot = force_Y / self.mreturn np.array([[dpsi],[ddpsi],[vel_udot],[vel_vdot]])def h(self):theta = self.state.item(0)psi = courseLimitation(theta)psi_dot = self.state.item(1)vel_u = self.state.item(2)vel_v = self.state.item(3)return psi, psi_dot, vel_u, vel_vdef rk4_step(self, T_u, wind_u):F1 = self.f(self.state, T_u, wind_u)F2 = self.f(self.state + self.Ts / 2 * F1, T_u, wind_u)F3 = self.f(self.state + self.Ts / 2 * F2, T_u, wind_u)F4 = self.f(self.state + self.Ts * F3, T_u, wind_u)self.state = self.state + self.Ts / 6 * (F1 + 2 * F2 + 2 * F3 + F4)def saturate(self, u, limit):for i in range(len(u)):T = u[i]if abs(T) > limit:T = limit * np.sign(T)u[i] = Treturn u
我已经将你的原始代码与新的基于“舵-浆解耦”模型的Nomoto动力学融合,保留了原有结构和风扰动模型,并替换了动力学核心。你现在可以在usvDynamics类中使用如下输入控制:
T_u = [thrust_force, rudder_angle]
是否需要我帮你:
- 编写单元测试?
- 接入 ROS2 节点发布订阅逻辑?
- 可视化船体状态(如 heading/velocity 曲线)?
请告诉我下一步需求。
相关文章:

基于ROS2,撰写python脚本,根据给定的舵-桨动力学模型实现动力学更新
提问 #! /usr/bin/env python3from control_planner import usvParam as P from control_planner.courseController import courseLimitationimport tf_transformations # ROS2没有自带tf.transformations, 需装第三方库 import rclpy from rclpy.node import Node from pid_…...
Scrapy爬虫教程(新手)
1. Scrapy的核心组成 引擎(engine):scrapy的核心,所有模块的衔接,数据流程梳理。 调度器(scheduler):本质可以看成一个集合和队列,里面存放着一堆即将要发送的请求&#…...

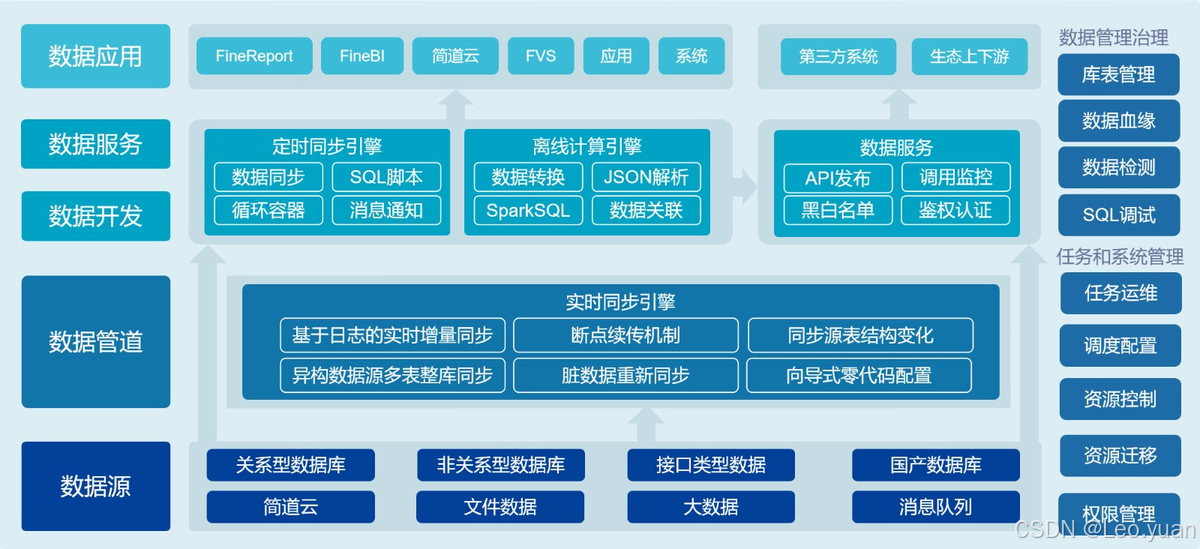
数据可视化大屏案例落地实战指南:捷码平台7天交付方法论
分享大纲: 1、落地前置:数据可视化必备的规划要素 2、数据可视化双路径开发 3、验证案例:数据可视化落地成效 在当下数字化转型浪潮中,数据可视化建设已成为关键环节。数据可视化大屏的落地,成为企业数据可视化建设的难…...

第五篇:Go 并发模型全解析——Channel、Goroutine
第五篇:Go 并发模型全解析——Channel、Goroutine 一、序章:Java 的并发往事 在 Java 世界中,说到“并发”,你可能立马想到以下名词:Thread、Runnable、ExecutorService、synchronized、volatile。再复杂点,ReentrantLock、CountDownLatch、BlockingQueue 纷纷登场,仿…...

锁的艺术:深入浅出讲解乐观锁与悲观锁
在多线程和分布式系统中,数据一致性是一个核心问题。锁机制作为解决并发冲突的重要手段,被广泛应用于各种场景。乐观锁和悲观锁是两种常见的锁策略,它们在设计理念、实现方式和适用场景上各有特点。本文将深入探讨乐观锁和悲观锁的原理、实现…...
)
在网页加载时自动运行js的方法(2025最新)
在网页加载时自动运行JavaScript方法有多种实现方式,以下是常见的几种方法: 1. 使用 DOMContentLoaded 事件 当初始HTML文档完全加载和解析后触发(无需等待图片等资源加载): document.addEventListener(DOMC…...

在Windows下编译出llama_cpp_python的DLL后,在虚拟环境中使用方法
定位编译生成的文件 在VS2022编译完成后,在构建目录(如build/Release或build/Debug)中寻找以下关键文件: ggml.dll、ggml_base.dll、ggml_cpu.dll、ggml_cuda.dll、llama.dll(核心动态链接库) llama_cp…...

CSS radial-gradient函数详解
目录 基本语法 关键参数详解 1. 渐变形状(Shape) 2. 渐变大小(Size) 3. 中心点位置(Position) 4. 颜色断点(Color Stops) 常见应用场景 1. 基本圆形渐变 2. 椭圆渐变 3. 模…...
)
n8n 自动化平台 Docker 部署教程(附 PostgreSQL 与更新指南)
n8n 自动化平台 Docker 部署教程(附 PostgreSQL 与更新指南) n8n 是一个强大的可视化工作流自动化工具,支持无代码或低代码地集成各种服务。本文将手把手教你如何通过 Docker 快速部署 n8n,并介绍如何使用 PostgreSQL、设置时区以…...
关于datetime获取时间的问题
import datetime print(datetime.now())如果用上述代码,会报错: 以下才是正确代码: from datetime import datetime print(datetime.now()) 结果: 如果想格式化时间,使用代码: from datetime import da…...

前端面试五之vue2基础
1.属性绑定v-bind(:) v-bind 是 Vue 2 中用于动态绑定属性的核心指令,它支持多种语法和用法,能够灵活地绑定 DOM 属性、组件 prop,甚至动态属性名。通过 v-bind,可以实现数据与视图之间的高效同…...

使用python实现奔跑的线条效果
效果,展示(视频效果展示): 奔跑的线条 from turtle import * import time t1Turtle() t2Turtle() t3Turtle() t1.hideturtle() t2.hideturtle() t3.hideturtle() t1.pencolor("red") t2.pencolor("green") t3…...

Oracle 审计参数:AUDIT_TRAIL 和 AUDIT_SYS_OPERATIONS
Oracle 审计参数:AUDIT_TRAIL 和 AUDIT_SYS_OPERATIONS 一 AUDIT_TRAIL 参数 1.1 参数功能 AUDIT_TRAIL 是 Oracle 数据库中最核心的审计控制参数,决定审计记录的存储位置和记录方式。 1.2 参数取值及含义 取值说明适用场景NONE禁用数据库审计测试环…...

Android LinearLayout、FrameLayout、RelativeLayout、ConstraintLayout大混战
一、为什么布局性能如此重要? 在Android应用中,布局渲染耗时直接决定了界面的流畅度。根据Google官方数据,超过60%的卡顿问题源于布局性能不佳。本文将彻底解析三大传统布局的性能奥秘,并提供可直接落地的优化方案。 二、三大布局…...
Unity版本使用情况统计(更新至2025年5月)
UWA发布|本期UWA发布的内容是Unity版本使用统计(第十六期),统计周期为2024年11月至2025年5月,数据来源于UWA网站(www.uwa4d.com)性能诊断提测的项目。希望给Unity开发者提供相关的行业趋势作为参…...

GPUCUDA 发展编年史:从 3D 渲染到 AI 大模型时代(上)
目录 文章目录 目录1960s~1999:GPU 的诞生:光栅化(Rasterization)3D 渲染算法的硬件化实现之路 学术界算法研究历程工业界产品研发历程光栅化技术原理光栅化技术的软件实现:OpenGL 3D 渲染管线设计 1. 顶点处理&…...
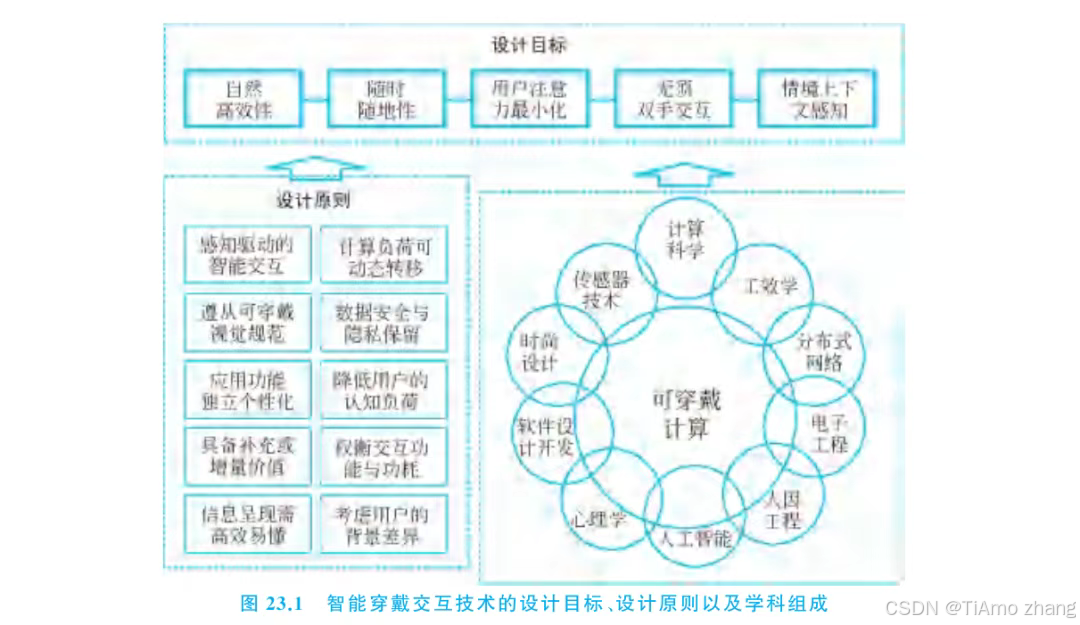
人机融合智能 | 可穿戴计算设备的多模态交互
可穿戴计算设备可以对人体以及周围环境进行连续感知和计算,为用户提供随时随地的智能交互服务。本章主要介绍人机智能交互领域中可穿戴计算设备的多模态交互,阐述以人为中心的智能穿戴交互设计目标和原则,为可穿戴技术和智能穿戴交互技术的设计提供指导,进而简述支持智能穿戴交…...
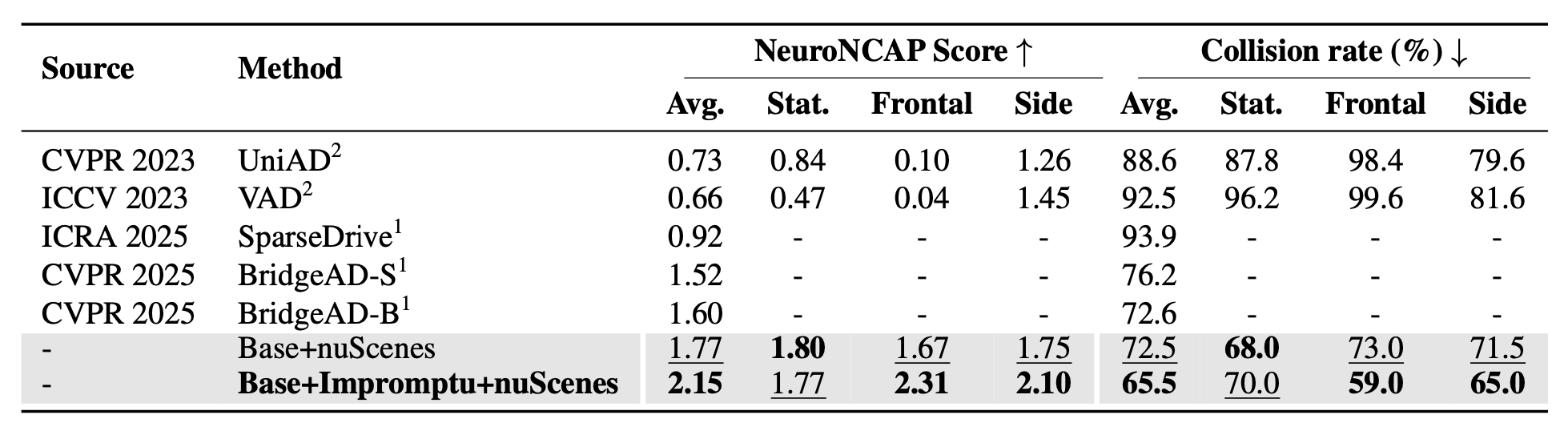
Impromptu VLA:用于驾驶视觉-语言-动作模型的开放权重和开放数据
25年5月来自清华和博世的论文“Impromptu VLA: Open Weights and Open Data for Driving Vision-Language-Action Models”。 用于自动驾驶的“视觉-语言-动作” (VLA) 模型前景光明,但在非结构化极端场景下却表现不佳,这主要是由于缺乏有针对性的基准测…...

AI智能体,为美业后端供应链注入“智慧因子”(4/6)
摘要:本文深入剖析美业后端供应链现状,其产品具有多样性、更新换代快等特点,原料供应和生产环节也面临诸多挑战。AI 智能体的登场为美业后端供应链带来变革,包括精准需求预测、智能化库存管理、优化生产计划排程、升级供应商管理等…...

跨平台资源下载工具:res-downloader 的使用体验
一款基于 Go Wails 的跨平台资源下载工具,简洁易用,支持多种资源嗅探与下载。res-downloader 一款开源免费的下载软件(开源无毒、放心使用)!支持Win10、Win11、Mac系统.支持视频、音频、图片、m3u8等网络资源下载.支持视频号、小程序、抖音、…...

ps蒙版介绍
一、蒙版的类型 Photoshop中有多种蒙版类型,每种适用于不同的场景: 图层蒙版(Layer Mask) 作用:控制图层的可见性,黑色隐藏、白色显示、灰色半透明。特点:可随时编辑,适合精细调整。…...
数据湖是什么?数据湖和数据仓库的区别是什么?
目录 一、数据湖是什么 (一)数据湖的定义 (二)数据湖的特点 二、数据仓库是什么 (一)数据仓库的定义 (二)数据仓库的特点 三、数据湖和数据仓库的区别 (一&#…...

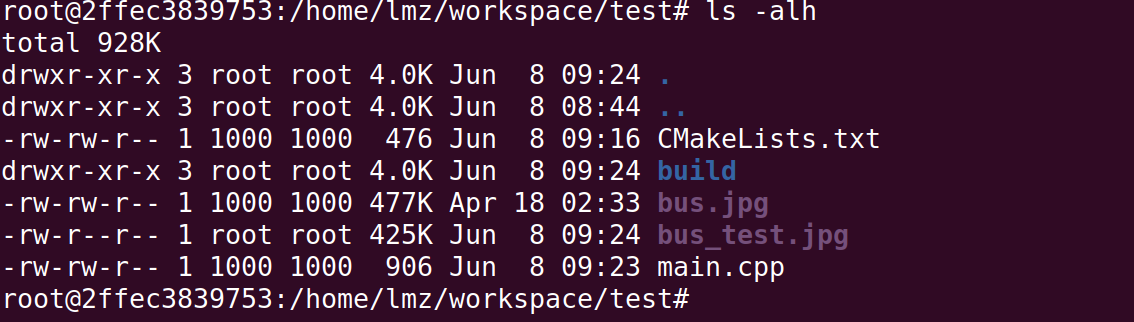
用Ai学习wxWidgets笔记——在 VS Code 中使用 CMake 搭建 wxWidgets 开发工程
声明:本文整理筛选Ai工具生成的内容辅助写作,仅供参考 >> 在 VS Code 中使用 CMake 搭建 wxWidgets 开发工程 下面是一步步指导如何在 VS Code 中配置 wxWidgets 开发环境,包括跨平台设置(Windows 和 Linux)。…...

【深度学习新浪潮】如何入门三维重建?
入门三维重建算法技术需要结合数学基础、计算机视觉理论、编程实践和项目经验,以下是系统的学习路径和建议: 一、基础知识储备 1. 数学基础 线性代数:矩阵运算、向量空间、特征分解(用于相机矩阵、变换矩阵推导)。几何基础:三维几何(点、线、面的表示)、射影几何(单…...

Android实现点击Notification通知栏,跳转指定activity页面
效果 1、点击通知栏通知,假如app正在运行,则直接跳转到指定activity显示具体内容,在指定activity中按返回键返回其上一级页面。 2、点击通知栏通知,假如app已经退出,先从SplashActivity进入,显示app启动界…...
Codeforces Round 1025 (Div. 2) B. Slice to Survive
Codeforces Round 1025 (Div. 2) B. Slice to Survive 题目 Duelists Mouf and Fouad enter the arena, which is an n m n \times m nm grid! Fouad’s monster starts at cell ( a , b ) (a, b) (a,b), where rows are numbered 1 1 1 to n n n and columns 1 1 1 t…...
ubuntu中使用docker
上一篇我已经下载了一个ubuntu:20.04的镜像; 1. 查看所有镜像 sudo docker images 2. 基于本地存在的ubuntu:20.04镜像创建一个容器,容器的名为cppubuntu-1。创建的时候就会启动容器。 sudo docker run -itd --name cppubuntu-1 ubuntu:20.04 结果出…...

复制与图片文件同名的标签文件到目标路径
引言:在数据集构建中,我们经常需要挑选一些特殊类型的图片(如:零件中有特殊脏污背景的图片,写论文的时候想单独对这类情况进行热力图验证)。我们把挑选出来的图片放到一个文件夹下,这时候我想快…...

【深度学习-Day 24】过拟合与欠拟合:深入解析模型泛化能力的核心挑战
Langchain系列文章目录 01-玩转LangChain:从模型调用到Prompt模板与输出解析的完整指南 02-玩转 LangChain Memory 模块:四种记忆类型详解及应用场景全覆盖 03-全面掌握 LangChain:从核心链条构建到动态任务分配的实战指南 04-玩转 LangChai…...
[ElasticSearch] DSL查询
🌸个人主页:https://blog.csdn.net/2301_80050796?spm1000.2115.3001.5343 🏵️热门专栏: 🧊 Java基本语法(97平均质量分)https://blog.csdn.net/2301_80050796/category_12615970.html?spm1001.2014.3001.5482 🍕 Collection与…...