基于FasterRCNN深度学习网络的车辆检测算法matlab仿真
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程
1.算法运行效果图预览

2.算法运行软件版本
MATLAB2022A
3.部分核心程序
.......................................................................
% 训练Faster R-CNN目标检测器
[detector, info] = trainFasterRCNNObjectDetector(trainingData,lgraph,options,'NegativeOverlapRange',[0 0.3],'PositiveOverlapRange',[0.6 1]);
% 在测试集上进行检测
figure;
for i = 1:12isubplot(3,4,i); I = imread(test_Tbl0.imageFilename{i});I = imresize(I,In_layer_Size(1:2));[bboxes,scores] = detect(detector,I);if isempty(bboxes)==0I1 = insertObjectAnnotation(I,'rectangle',bboxes,scores);elseI1 = I;endimshow(I1)
end
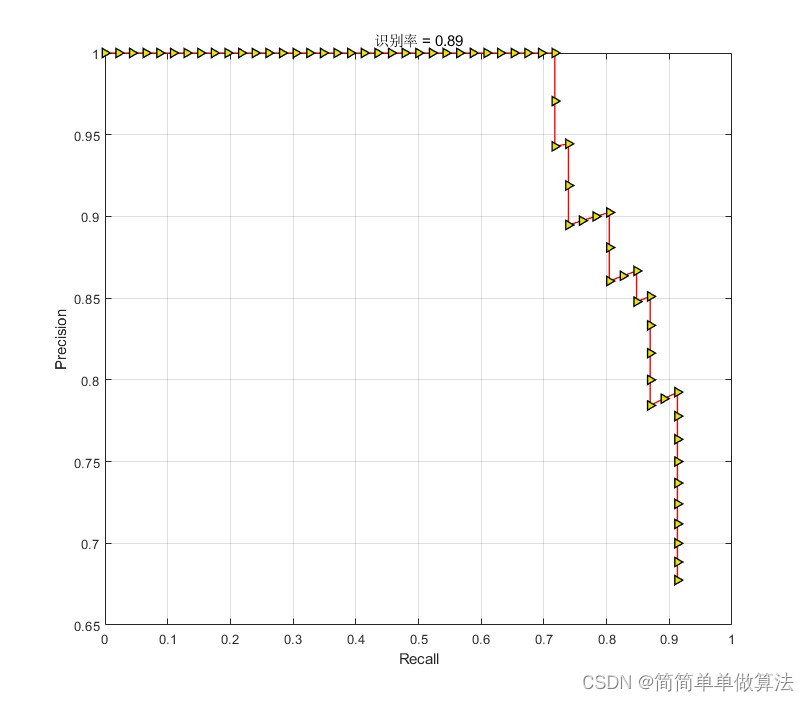
% 绘制精度-召回曲线并显示AP值
figure
plot(recall,precision,'-r>',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);
xlabel('Recall')
ylabel('Precision')
grid on
title(sprintf('识别率 = %.2f', ap))
00334.算法理论概述
车辆检测是计算机视觉和人工智能领域的重要研究方向,它在交通管理、智能驾驶和安防等领域具有广泛的应用。Faster R-CNN是一种常用的目标检测算法,结合了深度学习和区域建议技术,能够高效地检测出图像中的车辆目标。
1、数学原理:
Faster R-CNN是一种基于深度学习的目标检测算法,由Ross Girshick等人在2015年提出。它的核心思想是引入区域建议网络(Region Proposal Network,RPN)来生成候选区域,并结合Fast R-CNN来进行目标分类和边界框回归。通过端到端的训练,Faster R-CNN能够在一张图像中高效地检测出多个不同类别的目标。
RPN网络:
RPN是Faster R-CNN的核心组件之一,用于生成候选区域(Region Proposal)。RPN通过滑动窗口在特征图上提取多个不同尺度的锚框(Anchor),对每个锚框进行分类和回归预测。其中,分类预测用于判断锚框是否含有目标,回归预测用于修正锚框的位置,使其更准确地覆盖目标。RPN的数学原理可以描述为:
输入:特征图F,其中每个像素点对应于原始图像的一个区域。
输出:每个锚框的分类得分(是否含有目标)和位置调整量。
具体来说,对于每个锚框i,RPN将特征图F中的对应区域作为输入,通过两个全连接层(一个用于分类,一个用于回归)得到分类得分p_i和位置调整量t_i:
p_i = P_cls(F_i)
t_i = P_reg(F_i)
其中,P_cls和P_reg分别是分类和回归的全连接层,F_i是特征图中对应锚框i的区域。
Fast R-CNN分类和回归:
在RPN生成的候选区域基础上,Faster R-CNN引入Fast R-CNN网络来进行目标的最终分类和边界框回归。
Fast R-CNN的数学原理与Faster R-CNN之前的版本相同,可以表示为:
输入:候选区域R_i,对应于原始图像的一个目标区域。
输出:目标类别的分类概率p_i和边界框回归的位置调整量t_i。
具体来说,Fast R-CNN将候选区域R_i作为输入,通过多个卷积和全连接层提取特征,并在最后的全连接层上得到分类概率p_i和位置调整量t_i:
p_i = P_cls(R_i)
t_i = P_reg(R_i)
其中,P_cls和P_reg分别是分类和回归的全连接层。
2、实现过程:
基于Faster R-CNN深度学习网络的车辆检测算法的实现过程主要包括以下几个步骤:数据准备、网络构建、训练和测试。下面将详细介绍每个步骤:
数据准备:
首先,需要准备车辆检测的训练数据和测试数据。训练数据包括带有标签的图像样本,标签中包含每个目标的类别和边界框信息。测试数据是用于评估算法性能的图像样本,不需要标签信息。
网络构建:
构建Faster R-CNN网络,包括RPN网络和Fast R-CNN网络。在MATLAB中,可以使用Deep Learning Toolbox提供的函数来构建网络,例如imageInputLayer、convolution2dLayer、fullyConnectedLayer等。
在构建RPN网络时,通常采用VGG16或ResNet等预训练的卷积神经网络作为特征提取器,然后在其基础上添加RPN层和全连接层。
训练:
使用准备好的训练数据对Faster R-CNN网络进行训练。在训练过程中,通过计算分类损失和回归损失来更新网络参数,使得网络能够准确地检测出车辆目标。
可以使用MATLAB的trainFasterRCNNObjectDetector函数来进行训练,该函数将训练图像、标签和网络结构作为输入,同时可以设置训练参数,例如学习率、迭代次数等。
测试:
使用准备好的测试数据对训练好的Faster R-CNN网络进行测试。通过将测试图像输入到网络中,获取每个目标的类别和边界框信息。然后可以将检测结果与真实标签进行比较,评估算法的性能。MATLAB中可以使用detect函数对图像进行目标检测,输出每个目标的边界框和得分。
5.算法完整程序工程
OOOOO
OOO
O
相关文章:

基于FasterRCNN深度学习网络的车辆检测算法matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 MATLAB2022A 3.部分核心程序 ....................................................................... % 训练Faster R-…...
机器学习深度学习——多层感知机
👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er 🌌上期文章:机器学习&&深度学习——感知机 📚订阅专栏:机器学习&&深度学习 希望文章对你们有所帮助 上一节…...

Django模型将模型注释同步到数据库
1、安装django-comment-migrate库 pip install django-comment-migrate 2、将库注册到settings.py文件中 INSTALLED_APPS [...django_comment_migrate, # 表注释... ] 3、加注释 3.1、给模型(表)加注释 在模型的class Meta中编辑 verbose_name&…...
)
STM32 Flash学习(二)
STM32F1的官方固件库操作FLASH的几个常用函数。这些函数和定义分布在源文件stm32f1xx_hal_flash.c/stm32f1xx_hal_flash_ex.c以及头文件stm32f1xx_hal_flash.h/stm32f1xx_hal_flash_ex.h中。 锁定解函数 对FLASH进行写操作前必须先解锁,解锁操作:在FLA…...

kotlin获取泛型集合的类型信息
通过 reified 关键字和内联函数来实现 inline fun <reified T> getClassFromList(list: List<T>): Class<T> {return T::class.java }fun main() {val list listOf("Hello", "World")val clazz getClassFromList(list)println(clazz)…...

AQS源码解析
关于 AQS,网上已经有无数的文章阐述 AQS 的使用及其源码,所以多这么一篇文章也没啥所谓,还能总结一下研究过的源码。源码解析和某某的使用,大概是互联网上 Java 文章中写得最多的主题了。 AQS AQS 是 AbstractQueuedSynchronize…...

关于在VS2017中编译Qt项目遇到的问题
关于在VS2017中编译Qt项目遇到的问题 【QT】VS打开QT项目运行不成功 error MSB6006 “cmd.exe”已退出,代码为 2。如何在VS2017里部署的Qt Designer上编辑槽函数 【QT】VS打开QT项目运行不成功 error MSB6006 “cmd.exe”已退出,代码为 2。 链接 如何在VS2017里部署的Qt Design…...

Python web实战 | 使用 Flask 实现 Web Socket 聊天室
概要 今天我们学习如何使用 Python 实现 Web Socket,并实现一个实时聊天室的功能。本文的技术栈包括 Python、Flask、Socket.IO 和 HTML/CSS/JavaScript。 什么是 Web Socket? Web Socket 是一种在单个 TCP 连接上进行全双工通信的协议。它是 HTML5 中的…...
隐藏recovery菜单项)
Android10 Recovery系列(一)隐藏recovery菜单项
一 、背景 起因是遇到了一个隐藏删除recovery菜单项的需求。在寻找解决问题的时候,我经历了找到源码位置,调试修改,生效,思考是否可拓展,优化修改,符合要求的整个过程,下面简单分享一下。如果不想立即实现效果或者只想看解决方案,可以直接看总结那一个部分 二 、准备…...
选好NAS网络储存解决方案,是安全储存的关键
随着网络信息的发展,NAS也越来越受到企业的关注,NAS网络存储除了提供简单的存储服务外,还可以提供更好的数据安全性、更方便的文件共享方式。但市面上的产品种类繁多,我们该如何选择合适的产品,通过企业云盘࿰…...

AnimateDiff论文解读-基于Stable Diffusion文生图模型生成动画
文章目录 1. 摘要2. 引言3. 算法3.1 Preliminaries3.2. Personalized Animation3.3 Motion Modeling Module 4. 实验5.限制6. 结论 论文: 《AnimateDiff: Animate Your Personalized Text-to-Image Diffusion Models without Specific Tuning》 github: https://g…...
centos7安装tomcat
安装tomcat 必须依赖 JDK 环境,一定要提前装好JDK保证可以使用 一、下载安装包 到官网下载 上传到linux 服务器 二、安装tomcat 创建tomcat 文件夹 mkdir -p /usr/local/tomcat设置文件夹权限 chmod 757 tomcat将安装包上传至 新建文件夹 解压安装包 tar zx…...
【C#教程】零基础从入门到精通
今天给大家分享一套零基础从入门到精通:.NetCore/C#视频教程;这是2022年最新整理的、590G的开发教程资料。课程涵盖了.Net各方面的知识,跟着这个教程学习,就足够了。 课程分类 1、C#从基础到精通教程; 2、Winform从…...
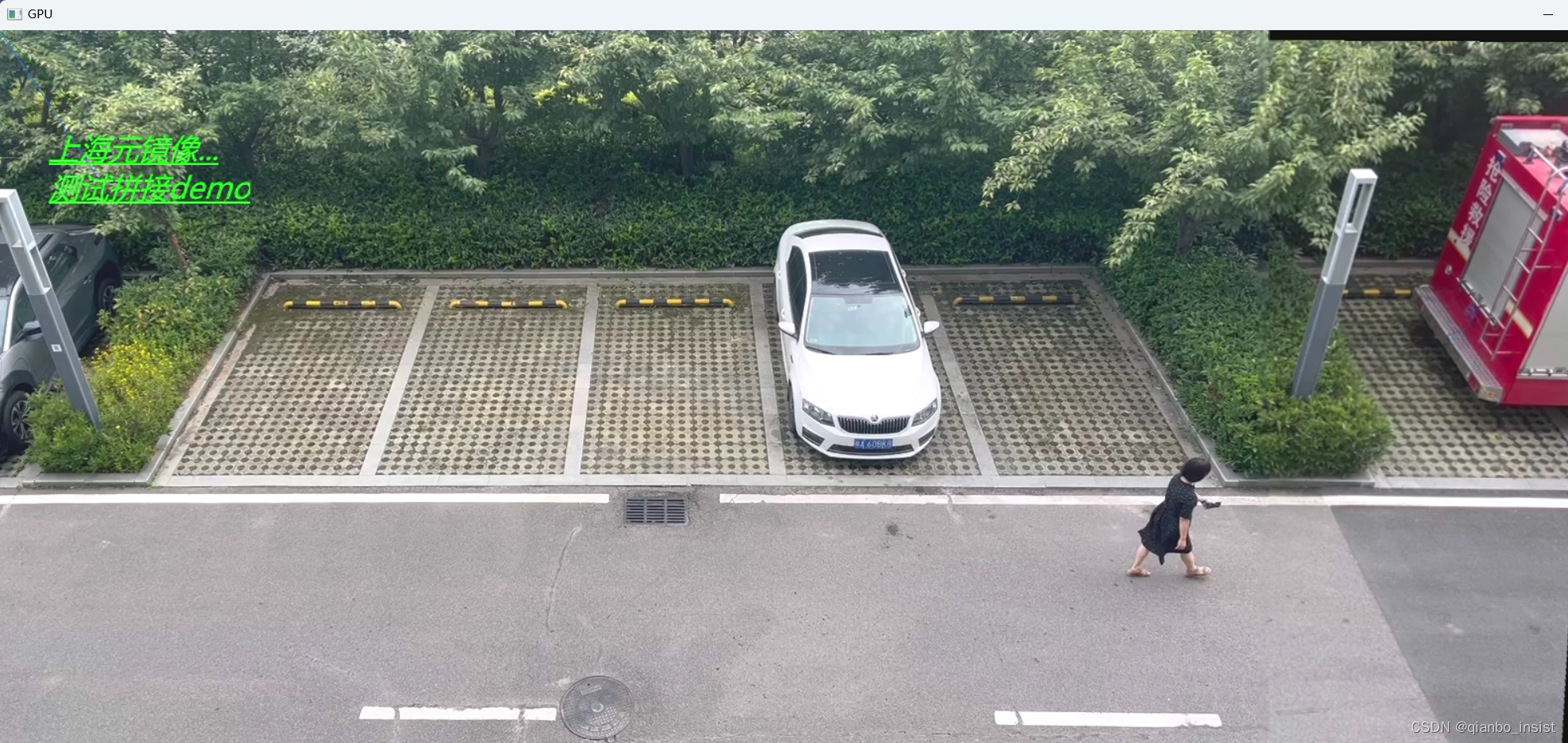
opencv rtsp 硬件解码
讨论使用opencv的reader 硬件解码的方案有太多种,如果使用ffmpeg硬件解码是最方便的,不方便的是把解码过后的GPU 拉到 CPU 上,再使用opencv的Mat 从cpu 上上载到gpu上,是不是多了两个过程,应该是直接从GPU mat 直接去…...

机器学习-Gradient Descent
机器学习(Gradient Descent) videopptblog 梯度下降(Gradient Descent) optimization problem: 损失函数最小化 假设本模型有两个参数𝜃1和𝜃2,随机取得初始值 求解偏微分,梯度下降对参数进行更新 Visualize: 确定梯度方向&…...
基础知识)
MySql003——SQL(结构化查询语言)基础知识
一、数据库的相关概念 DB:数据库(Database) 即存储数据的“仓库”,其本质是一个文件系统。它保存了一系列有组织的数据。DBMS:数据库管理系统(Database Management System) 是一种操纵和管理数…...

springCloud Eureka注册中心配置详解
1、创建一个springBoot项目 2、在springBoot项目中添加SpringCloud依赖 <dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-dependencies</artifactId><version>2021.0.3</version><type>…...

gti 远程操作
目录 一. 分布式版本控制管理系统 1. 理解分布式版本控制管理系统 二. 创建远程仓库 编辑 编辑 三. 克隆远程仓库_HTTP 四. 克隆远程仓库_SSH 配置公钥 添加公钥 五. git 向远程仓库推送 六. 拉取远程仓库 七. 忽略特殊文件 八. 配置别名 一. 分布式版本控制管理…...

Ftrace
一、概述 Ftrace有剖析器和跟踪器。剖析器提供统计摘要,如激素胡和直方图;而跟踪器提供每一个事件的细节。 Ftrace剖析器列表: 剖析器描述function内核函数统计分析kprobe profiler启用的kprobe计数器uprobe profiler启用的uprobe计数器hi…...
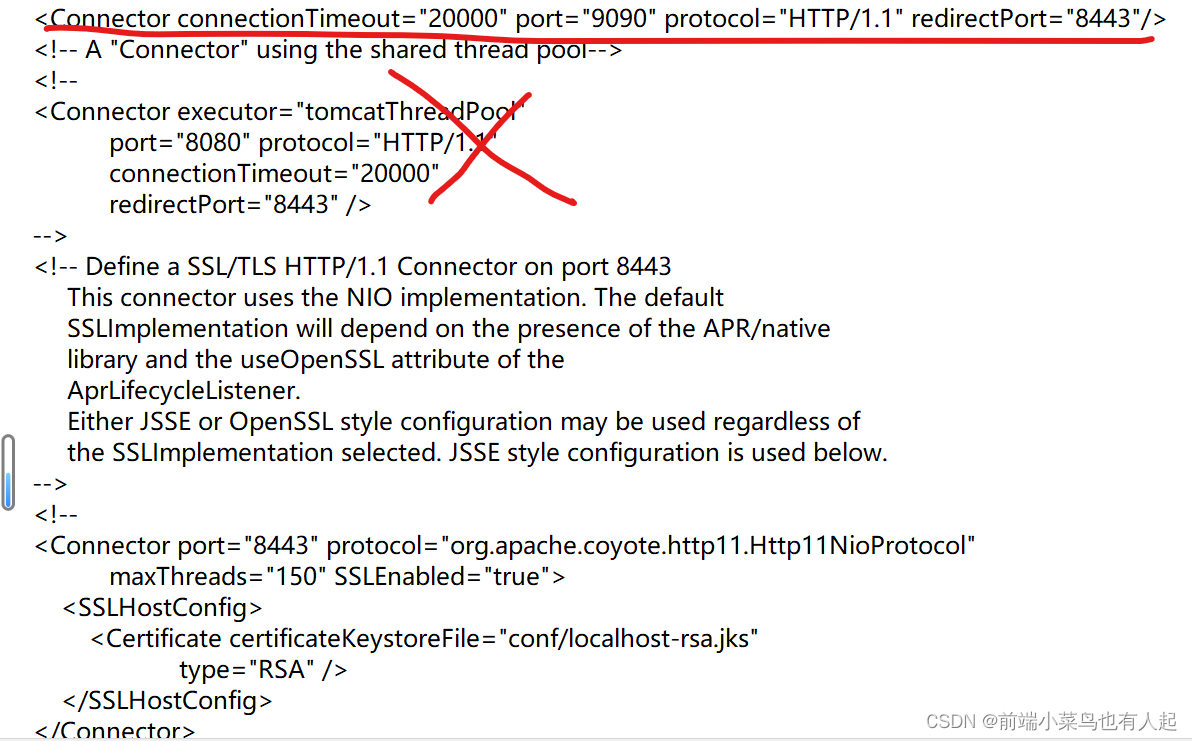
Tomcat修改端口号
网上的教程都比较老,今天用tomcat9.0记录一下 conf文件夹下server.xml文件 刚开始改了打红叉的地方,发现没用,改了上面那行...

嵌入式与复杂系统安全开发实战:从威胁建模到安全编码的十大核心实践
1. 项目概述:为什么安全开发不再是“可选项”?干了十几年软件开发,从早期的桌面应用到后来的Web服务,再到近几年深度参与的嵌入式系统,我最大的感触就是:安全这件事,已经从“锦上添花”变成了“…...

macOS用户必看:vscode-icons安装与使用完整手册
macOS用户必看:vscode-icons安装与使用完整手册 【免费下载链接】vscode-icons Custom Visual Studio Code Icons 项目地址: https://gitcode.com/gh_mirrors/vsc/vscode-icons 想要为你的Visual Studio Code换上个性化图标吗?vscode-icons项目提…...

交易所技术三重门:吞吐量、安全性与合规性的不可能三角破解之道
引言:交易所战争进入3.0时代 当Coinbase市值突破千亿美元,当Binance单日交易量超越纳斯达克,当Uniswap用AMM机制改写交易规则——数字货币交易所已从边缘实验进化为金融基础设施的核心。在这场价值万亿美元的军备竞赛中,技术架构的…...

5分钟快速生成专业README文件:readme-md-generator完全指南
5分钟快速生成专业README文件:readme-md-generator完全指南 【免费下载链接】readme-md-generator 📄 CLI that generates beautiful README.md files 项目地址: https://gitcode.com/gh_mirrors/re/readme-md-generator 在开源项目开发中&#x…...

TensorFlow数据增强Pipeline:从固定顺序到条件驱动的工业级重构
1. 为什么“写死顺序”的增强 pipeline 在真实项目中总是卡壳?你有没有遇到过这种场景:模型在验证集上指标涨得不错,一到线上推理就崩得稀里哗啦?或者训练时 loss 曲线看着很稳,但模型对稍微偏移一点的拍摄角度、光照变…...

【芯片测试】:自定义波形与条件波形
第四篇:进阶篇(上)—— 用户自定义波形与条件波形 系列:《VCDSTIL 实战:从仿真波形到 ATE 测试向量》第 4 篇(共 5 篇) 前言 前三篇介绍的都是 VCDSTIL 的"自动提取"模式:…...

标准化封装国产电源:钡特电源 VB50-24S24LD 与金升阳 URB2424LD-50WR3 同属工业高可靠
在工业电子系统设计中,工业 DC-DC 电源模块作为核心供电单元,其标准化程度、稳定性及适配性直接影响设备整体可靠性与研发效率。钡特电源 VB50-24S24LD 与金升阳 URB2424LD-50WR3 作为 50W 级国产工业 DC-DC 代表产品,均采用国际标准封装引脚…...

RAG 和 NotebookLM 都试过后,我才发现数据库知识库真正缺的不是搜索
很多数据库知识库不好用,不是模型不会答,而是知识没有被整理成可调用、可校验、可维护的资产。 前面几篇一直在聊 DB Agent。 聊 Skill,聊记忆,聊告警风暴,聊编排,也聊到了系统画像、历史案例和当前证据。…...

PHP Intelephense项目结构解析:多工作区、虚拟工作区与远程开发
PHP Intelephense项目结构解析:多工作区、虚拟工作区与远程开发 【免费下载链接】vscode-intelephense PHP intellisense for Visual Studio Code 项目地址: https://gitcode.com/gh_mirrors/vs/vscode-intelephense PHP Intelephense是一款为Visual Studio …...

量子转导技术:微波与光学量子系统的桥梁
1. 量子转导技术概述量子转导技术是连接微波与光学量子系统的关键桥梁,其核心功能是实现不同频段量子信息的高保真转换。作为一名长期从事量子器件研发的工程师,我见证了这项技术从实验室走向实际应用的完整历程。简单来说,它就像量子世界的&…...