PID模块化__以stm32直流电机速度为例
文章目录
- 前言
- 一、相关PID源码
- .c
- .h
- 二、如何使用
- 1.创建变量
- 2.初始化
- 3.运算
- 4.修改pid参数
- 总结
前言
本篇使用到的基于这个STM32CubeMX 直流电机PID速度控制、HAL库、cubemx、PID、速度控制、增量式
由于上次使用的pid没有模块化,当多出使用pid的时候就会很麻烦
所以这次使用的模块化的
一、相关PID源码
.c
/* 包含头文件 ----------------------------------------------------------------*/
#include "pid.h"/* 私有类型定义 --------------------------------------------------------------*/
/* 私有宏定义 ----------------------------------------------------------------*/
/* 私有变量 ------------------------------------------------------------------*/
/* 扩展变量 ------------------------------------------------------------------*/
/* 私有函数原形 --------------------------------------------------------------*/
/* 函数体 --------------------------------------------------------------------*/
void abs_limit(float *a, float ABS_MAX)// 对输入 a 进行限制,使其在 [-ABS_MAX, ABS_MAX] 区间内
{if (*a > ABS_MAX)*a = ABS_MAX;if (*a < -ABS_MAX)*a = -ABS_MAX;
}// 初始化 PID 参数
static void pid_param_init(pid_t* pid, // PID 控制器结构体uint32_t mode, // PID 控制器模式uint32_t maxout, // PID 控制器输出最大值uint32_t intergral_limit, // PID 控制器积分限制float kp, // PID 控制器 P 项系数float ki, // PID 控制器 I 项系数float kd) // PID 控制器 D 项系数
{pid->integral_limit = intergral_limit;pid->max_out = maxout;pid->pid_mode = mode;pid->p = kp;pid->i = ki;pid->d = kd;}
/*** @brief modify pid parameter when code running* @param[in] pid: control pid struct* @param[in] p/i/d: pid parameter* @retval none*/
static void pid_reset(pid_t *pid, float kp, float ki, float kd)// 重置 PID 控制器的参数
{pid->p = kp;pid->i = ki;pid->d = kd;pid->pout = 0;pid->iout = 0;pid->dout = 0;pid->out = 0;}/*** @brief calculate delta PID and position PID* @param[in] pid: control pid struct* @param[in] get: measure feedback value* @param[in] set: target value* @retval pid calculate output */
float pid_calc(pid_t *pid, float get, float set)// 计算 PID 控制器的输出
{pid->get = get;pid->set = set;pid->err[NOW] = set - get;if ((pid->input_max_err != 0) && (pid->err[NOW] > pid->input_max_err))pid->err[NOW] = pid->input_max_err;if ((pid->input_min_err != 0) && (pid->err[NOW] < pid->input_min_err))pid->err[NOW] = pid->input_min_err;if (pid->pid_mode == POSITION_PID) //position PID// 位置式 PID 控制器{pid->pout = pid->p * pid->err[NOW];pid->iout += pid->i * pid->err[NOW];pid->dout = pid->d * (pid->err[NOW] - pid->err[LAST]);abs_limit(&(pid->iout), pid->integral_limit);pid->out = pid->pout + pid->iout + pid->dout;abs_limit(&(pid->out), pid->max_out);}else if (pid->pid_mode == DELTA_PID) //delta PID// 增量式 PID 控制器{pid->pout = pid->p * (pid->err[NOW] - pid->err[LAST]);pid->iout = pid->i * pid->err[NOW];pid->dout = pid->d * (pid->err[NOW] - 2 * pid->err[LAST] + pid->err[LLAST]);pid->out += pid->pout + pid->iout + pid->dout;abs_limit(&(pid->out), pid->max_out);}pid->err[LLAST] = pid->err[LAST];pid->err[LAST] = pid->err[NOW];if ((pid->output_deadband != 0) && (fabs(pid->out) < pid->output_deadband))return 0;elsereturn pid->out;}
void pid_ClearIntegrals(pid_t* pid)// 清除积分项
{pid->pout = 0;pid->iout = 0;pid->dout = 0;pid->out = 0;
}
/*** @brief initialize pid parameter* @retval none*/
void PID_struct_init( // 初始化 PID 结构体pid_t* pid,uint32_t mode,uint32_t maxout,uint32_t intergral_limit,float kp,float ki,float kd)
{pid->f_param_init = pid_param_init;pid->f_pid_reset = pid_reset;pid->f_pid_calc = pid_calc;pid->f_pid_ClearIntegrals = pid_ClearIntegrals;pid->f_param_init(pid, mode, maxout, intergral_limit, kp, ki, kd);pid->f_pid_reset(pid, kp, ki, kd);
}.h
#ifndef __PID_H__
#define __PID_H__/* 包含头文件 ----------------------------------------------------------------*/
#include "stdint.h"
#include "math.h"
/* 类型定义 ------------------------------------------------------------------*/
enum
{LLAST = 0,LAST,NOW,POSITION_PID,DELTA_PID,
};
typedef struct pid_t
{float p;float i;float d;float set;float get;float err[3];float pout;float iout;float dout;float out;float input_max_err; //input max err;float input_min_err; //input max err;float output_deadband; //output deadband;uint32_t pid_mode;uint32_t max_out;uint32_t integral_limit;void (*f_param_init)(struct pid_t *pid, uint32_t pid_mode,uint32_t max_output,uint32_t inte_limit,float p,float i,float d);void (*f_pid_reset)(struct pid_t *pid, float p, float i, float d);float (*f_pid_calc)(struct pid_t *pid, float get, float set);void (*f_pid_ClearIntegrals)(struct pid_t* pid);
} pid_t;
/* 宏定义 --------------------------------------------------------------------*/
/* 扩展变量 ------------------------------------------------------------------*/
/* 函数声明 ------------------------------------------------------------------*/
void PID_struct_init(pid_t* pid,uint32_t mode,uint32_t maxout,uint32_t intergral_limit,float kp,float ki,float kd);
float pid_calc(pid_t *pid, float get, float set);
#endif // __PID_H__二、如何使用
1.创建变量
在main.c或者其他位置创建pid的变量
pid_t a_moto_pid;
pid_t b_moto_pid;
2.初始化
注意一定要在pid计算之前初始化all_moto_pid_init,不然会导致stm32硬件错误!!!!
void all_moto_pid_init(void)
{PID_struct_init(&a_moto_pid, // PID 控制器对象DELTA_PID, // 控制器模式7500, // 输出最大值0, // 积分限制45.0f, // P 项系数25.0f, // I 项系数0.0f // D 项系数);PID_struct_init(&b_moto_pid, // PID 控制器对象DELTA_PID, // 控制器模式7500, // 输出最大值0, // 积分限制45.0f, // P 项系数25.0f, // I 项系数0.0f // D 项系数); }
3.运算
int a_moto_pid_calc(float current_value,float target_value)/*current_value当前值target_value目标值*/
{
// 使用 PID 控制器计算控制输出int control_output = a_moto_pid.f_pid_calc(&a_moto_pid, current_value, target_value); return control_output;
}
int b_moto_pid_calc(float current_value,float target_value)/*current_value当前值target_value目标值*/
{
// 使用 PID 控制器计算控制输出int control_output = b_moto_pid.f_pid_calc(&b_moto_pid, current_value, target_value); return control_output;
}4.修改pid参数
/*
修改pid的值
*/
void angle_pid_set(float p,float i ,float d )
{angle_pid.f_pid_reset(&angle_pid, p, i, d);
}
总结
简述一下,不喜勿喷谢谢。
相关文章:

PID模块化__以stm32直流电机速度为例
文章目录 前言一、相关PID源码.c.h 二、如何使用1.创建变量2.初始化3.运算4.修改pid参数 总结 前言 本篇使用到的基于这个STM32CubeMX 直流电机PID速度控制、HAL库、cubemx、PID、速度控制、增量式 由于上次使用的pid没有模块化,当多出使用pid的时候就会很麻烦 所以…...
Java ~ Collection/Executor ~ DelayQueue【总结】
前言 文章 相关系列:《Java ~ Collection【目录】》(持续更新)相关系列:《Java ~ Executor【目录】》(持续更新)相关系列:《Java ~ Collection/Executor ~ DelayQueue【源码】》(学…...

前端高级面试题-安全相关
1 XSS 跨⽹站指令码(英语: Cross-site scripting ,通常简称为: XSS )是⼀种⽹站应⽤程式的安全漏洞攻击,是代码注⼊的⼀种。 它允许恶意使⽤者将程式码注⼊到⽹⻚上,其他使⽤者在观看⽹⻚时就会…...
【前缀和】560.和为 K 的子数组
Halo,这里是Ppeua。平时主要更新C,数据结构算法,Linux与ROS…感兴趣就关注我bua! 和为K的子数组 题目:示例:题解:解法一:解法二: 题目: 示例: 题解: 解法一: 暴力解法:我们很容易想到通过两个for循环去遍…...
【Docker】安全及日志管理
安全及日志管理 Docker 安全及日志管理一:Docker 容器与虚拟机的区别1. 隔离与共享2. 性能与损耗 二:Docker 存在的安全问题1.Docker 自身漏洞2.Docker 源码问题 三:Docker 架构缺陷与安全机制1. 容器之间的局域网攻击2. DDoS 攻击耗尽资源3.…...
基于x-scan扫描线的3D模型渲染算法
基于x-scan算法实现的z-buffer染色。c#语言,.net core framework 3.1运行。 模型是读取3D Max的obj模型。 x-scan算法实现: public List<Vertex3> xscan() {List<Vertex3> results new List<Vertex3>();SurfaceFormula formula g…...
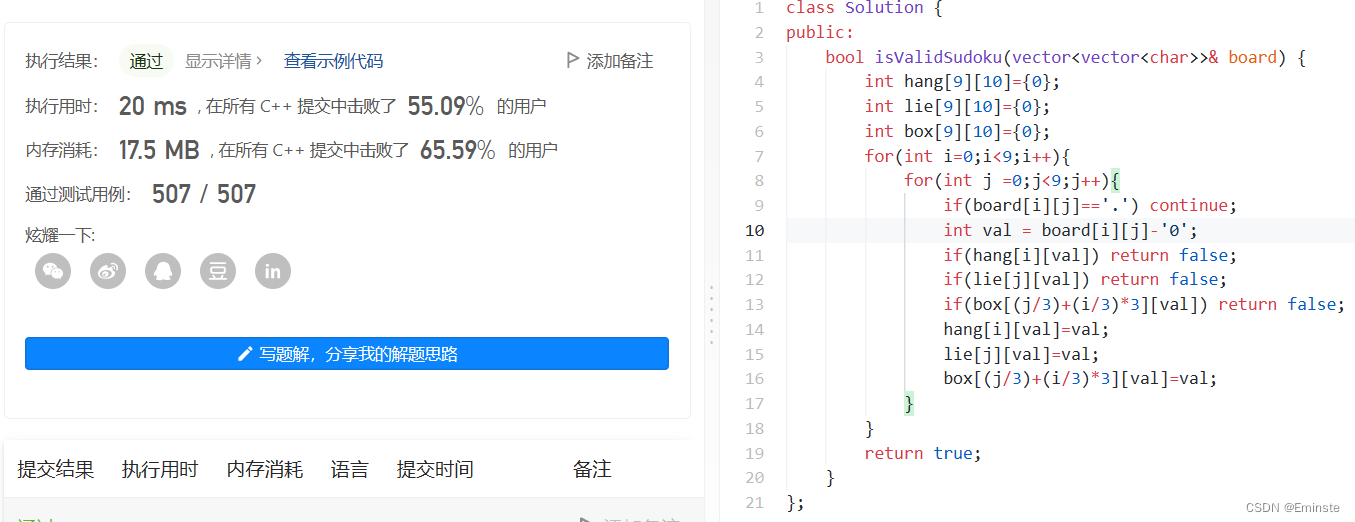
LeetCode36.Valid-Sudoku<有效的数独>
题目: 思路: 这题并不难,它类似于N皇后问题。在N皇后问题中,行,列,对角线,写对角线,都不能出现连续的皇后。 本题类似,不过他是行,列,还有一个B…...
Linux中的pause函数
2023年7月29日,周六上午 函数原型 在Linux中,pause()函数用于使当前进程暂停执行,直到接收到一个信号。 #include <unistd.h>int pause(void);pause()函数不接受任何参数。 通常,pause()函数用于编写简单的信号处理程序&…...

CommonCollections6链分析
前面和CC1一样 优点是不限制jdk版本和cc的版本 先开一个ChainedTransformer 然后创LazyMap 我们顺便执行一下避免上面写错 能弹计算器 没问题 后面就是CC6不同的地方了 我们需要一个TiedMapEntry 因为需要一个类调用了get方法 在TiedMapEntry的getValue()方法中调用了get()…...
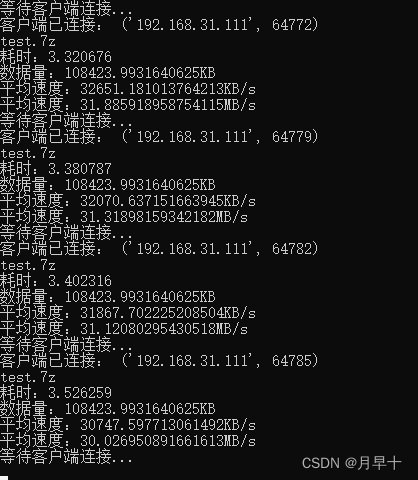
优化基于tcp,socket的ftp文件传输程序
原始程序: template_ftp_server_old.py: import socket import json import struct import os import time import pymysql.cursorssoc socket.socket(socket.AF_INET, socket.SOCK_STREAM) HOST 192.168.31.111 PORT 4101 soc.bind((HOST,PORT)) p…...
MySQL 数据库 【增删查改(二)】
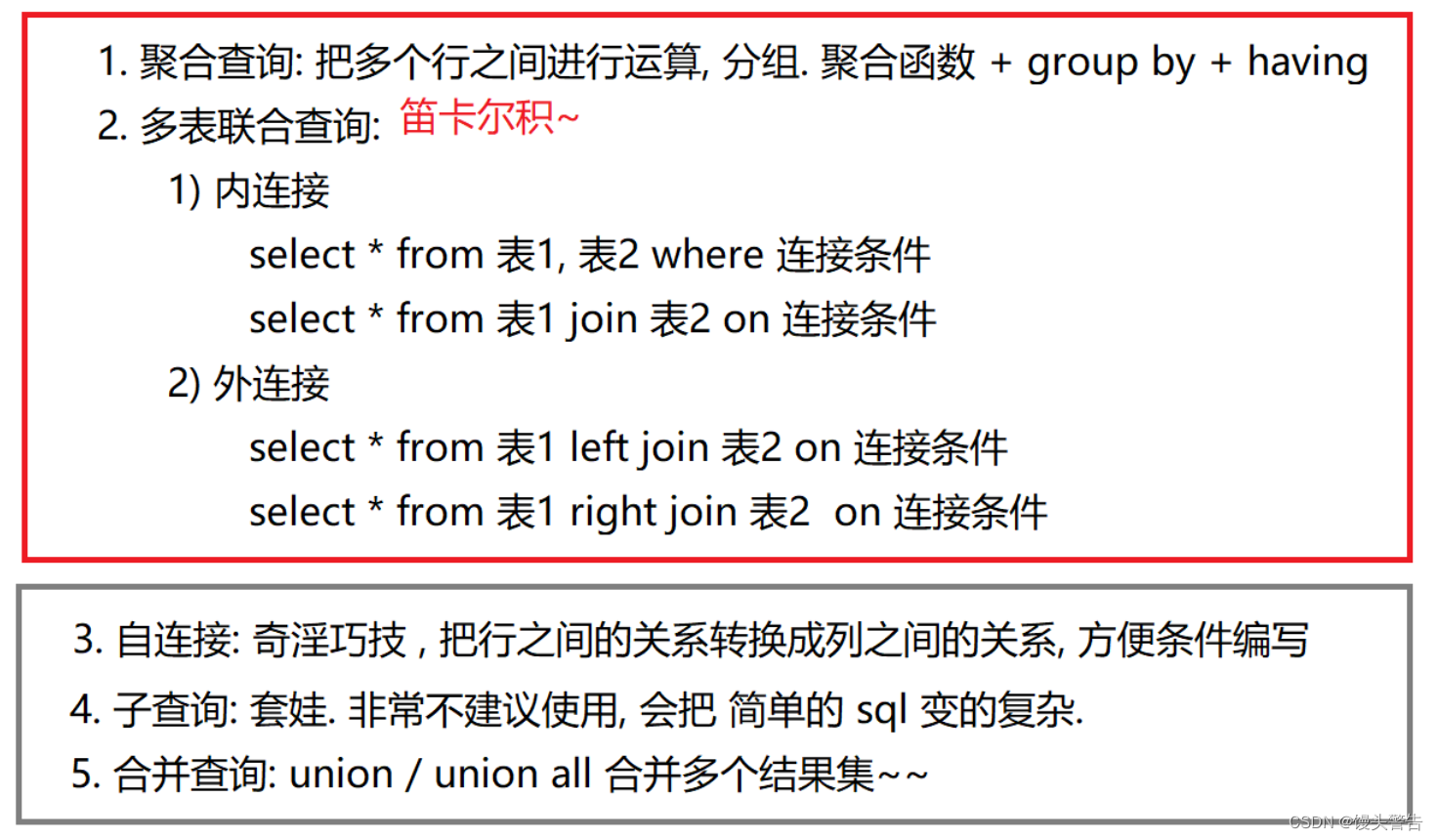
目录 一、表的设计 1、一对一 2、一对多 3、多对多 二、新增 三、查询 1、聚合查询 (1)聚合函数: (2) group by 子句 (3)having 2、联合查询 (1)内连接 (2)外连接 (3)自链接 (4)…...

力扣 -- 978. 最长湍流子数组
一、题目 二、解题步骤 下面是用动态规划的思想解决这道题的过程,相信各位小伙伴都能看懂并且掌握这道经典的动规题目滴。 三、参考代码 class Solution { public:int maxTurbulenceSize(vector<int>& nums) {int nnums.size();vector<int> f(n);…...
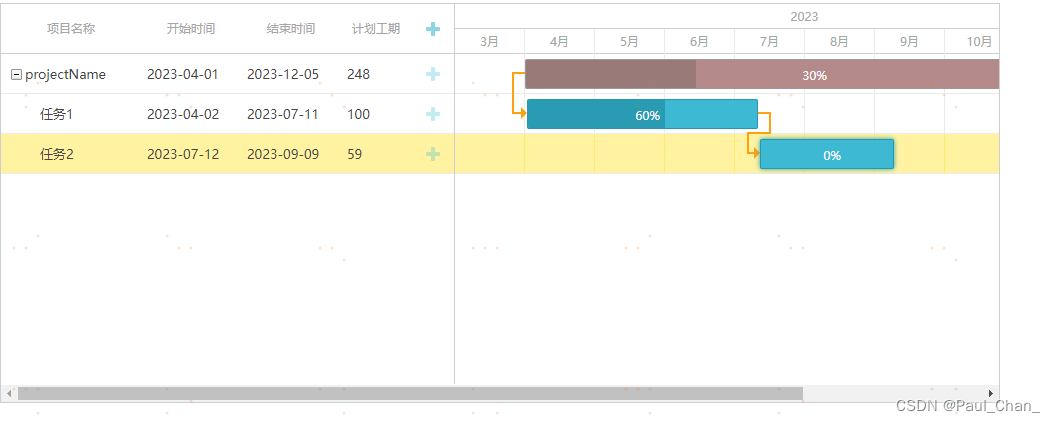
甘特图 Dhtmlx Gantt
介绍 在一些任务计划、日程进度等场景中我们会使用到甘特图,Dhtmlx Gantt 对于甘特图的实现支持很友好,文档API介绍全面,虽然增强版的收费,但免费版的足以够用。 官网:https://docs.dhtmlx.com/gantt/ 安装dhtml gannt…...

iOS 应用上架流程详解
iOS 应用上架流程详解 欢迎来到我的博客,今天我将为大家分享 iOS 应用上架的详细流程。在这个数字化时代,移动应用已经成为了人们生活中不可或缺的一部分,而 iOS 平台的 App Store 则是开发者们发布应用的主要渠道之一。因此,了解…...
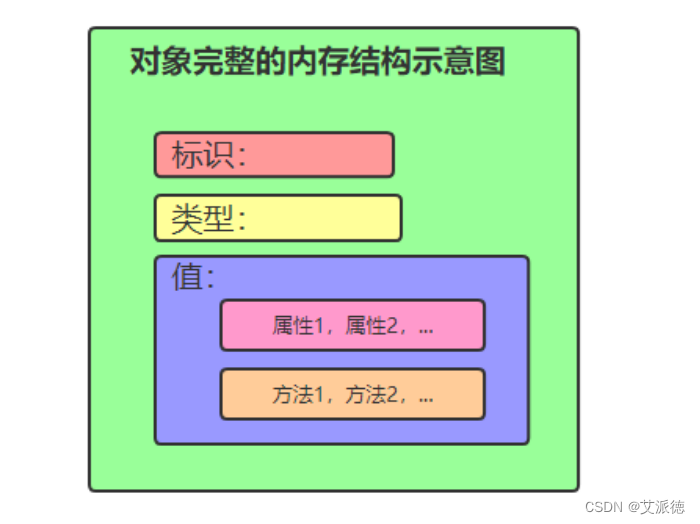
Python入门【LEGB规则、面向对象简介、面向过程和面向对象思想、面向对象是什么? 对象的进化 、类的定义、对象完整内存结构 】(十三)
👏作者简介:大家好,我是爱敲代码的小王,CSDN博客博主,Python小白 📕系列专栏:python入门到实战、Python爬虫开发、Python办公自动化、Python数据分析、Python前后端开发 📧如果文章知识点有错误…...

【消息中间件】原生PHP对接Uni H5、APP、微信小程序实时通讯消息服务
文章目录 视频演示效果前言一、分析二、全局注入MQTT连接1.引入库2.写入全局连接代码 二、PHP环境建立总结 视频演示效果 【uniapp】实现买定离手小游戏 前言 Mqtt不同环境问题太多,新手可以看下 《【MQTT】Esp32数据上传采集:最新mqtt插件(支…...

【C语言初阶】指针篇—上
目录 1. 指针是什么?2. 指针和指针类型2.1 指针-整数2.2 指针的解引用 3. 野指针3.1 野指针成因1. 指针未初始化2. 指针越界访问3. 指针指向的空间释放 3.2 如何规避野指针 1. 指针是什么? 指针是什么? 指针理解的2个要点: > 1…...

基于FasterRCNN深度学习网络的车辆检测算法matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 MATLAB2022A 3.部分核心程序 ....................................................................... % 训练Faster R-…...
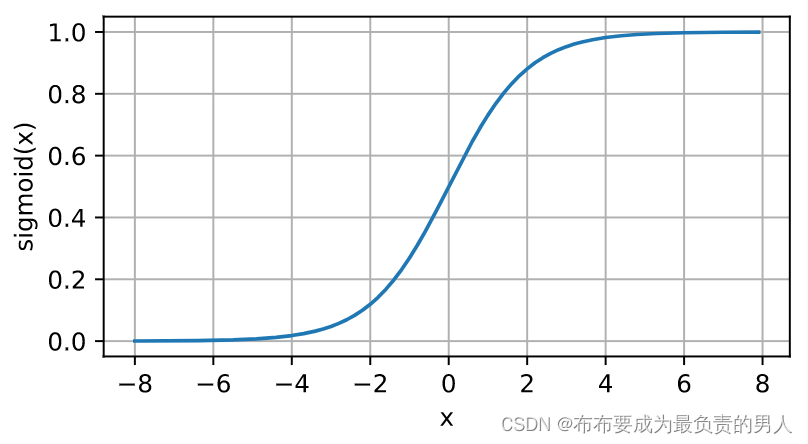
机器学习深度学习——多层感知机
👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er 🌌上期文章:机器学习&&深度学习——感知机 📚订阅专栏:机器学习&&深度学习 希望文章对你们有所帮助 上一节…...

Django模型将模型注释同步到数据库
1、安装django-comment-migrate库 pip install django-comment-migrate 2、将库注册到settings.py文件中 INSTALLED_APPS [...django_comment_migrate, # 表注释... ] 3、加注释 3.1、给模型(表)加注释 在模型的class Meta中编辑 verbose_name&…...

鸿蒙备考题库页面构建:今日计划与题目预览模块的详细解析
鸿蒙备考题库页面构建:今日计划与题目预览模块的详细解析 前言 在 HarmonyOS 6.0 应用开发中,在线教育类页面的学习计划展示和题目练习模块是用户停留时间最长的核心区域。本文将以“备考题库”应用中的“今日学习计划”任务列表和“题目预览”答题卡片为…...

【SSD】闪存1
闪存的特点 闪存是非易失存储器,掉电了数据也不会丢失,但是闪存不能够覆写,必须按块擦除,按页写入。 闪存的基本单元 闪存的基本单元是Cell,一种类Nmos的双层浮栅MOS管 MOS管 首先理解什么是MOS管:(金…...

短波通讯:魔术6米波
制作一个用于50MHz(6米波段)的天线,是业余无线电爱好者探索这一“魔术波段”的基础。该频段天线相对短波天线更易于制作和架设,但良好的设计对捕捉稍纵即逝的远距离传播至关重要。以下是基于不同需求的天线类型、设计要点和制作指…...

H3CSE 高性能园区网:VRRP 技术详解
H3CSE 高性能园区网:VRRP 技术详解VRRP 技术详解一、VRRP 简介1.1 VRRP 技术背景与定义1.1.1 技术背景1.1.2 VRRP 核心定义1.2 VRRP 核心原理与关键概念1.2.1 主备切换工作流程1.2.2 关键概念解析1.2.3 免费ARP工作原理二、VRRP 核心工作原理2.1 VRRP 基础运行原理概…...

Unity游戏配置管线实战:Luban Schema与Data分离设计
1. 为什么表格配置不是“偷懒”,而是Unity项目规模化生存的刚需在Unity游戏开发里,我见过太多团队把角色属性、武器参数、任务对话全写死在C#脚本里——刚上线时改个血量要改三处代码,策划提个新武器需求得等程序员下班后加字段,版…...
:仅支持至2024年Q3 API v2退役前)
【限时开放】ElevenLabs波斯文语音调试秘钥包(含Persian SSML扩展标签库、RTL音频波形对齐工具、实时音素诊断CLI):仅支持至2024年Q3 API v2退役前
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs波斯文语音支持的演进与技术边界 ElevenLabs自2022年推出多语言TTS服务以来,波斯文(Farsi)长期处于实验性支持阶段。早期版本仅能通过自定义音色音素级微调…...

如何安全提取未知文件:unblob的5大安全防护机制实战指南
如何安全提取未知文件:unblob的5大安全防护机制实战指南 【免费下载链接】unblob Extract files from any kind of container formats 项目地址: https://gitcode.com/gh_mirrors/un/unblob 在数字取证和固件分析工作中,我们经常需要处理来源不明…...

ChatGPT-Web-Midjourney-Proxy终极指南:10大功能特性全解析
ChatGPT-Web-Midjourney-Proxy终极指南:10大功能特性全解析 ChatGPT-Web-Midjourney-Proxy是一个革命性的开源项目,它将ChatGPT对话、Midjourney图像生成、GPTs应用商店以及多种AI功能整合到一个统一的Web界面中。这个项目为开发者和普通用户提供了一站…...

rebar3高级配置与性能优化:让你的构建速度提升300% [特殊字符]
rebar3高级配置与性能优化:让你的构建速度提升300% 🚀 【免费下载链接】rebar3 Erlang build tool that makes it easy to compile and test Erlang applications and releases. 项目地址: https://gitcode.com/gh_mirrors/re/rebar3 你是否曾经因…...

长期项目使用Taotoken聚合API的稳定性与容灾感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期项目使用Taotoken聚合API的稳定性与容灾感受 1. 项目背景与接入初衷 我们团队负责一个面向内部用户的中型知识问答系统&#…...