A Generalized Loss Function for Crowd Counting and Localization阅读笔记
简单来说,就是用了UOT来解决人群计数问题
代码:https://github.com/jia-wan/GeneralizedLoss-Counting-Pytorch.git
我改了一点的:https://github.com/Nightmare4214/GeneralizedLoss-Counting-Pytorch.git
loss
设density map为 A = { ( a i , x i ) } i = 1 n \mathcal{A} =\left\{\left(a_i, \mathbf{x}_i\right)\right\}_{i=1}^{n} A={(ai,xi)}i=1n
其中 a i a_i ai为预测density, x i ∈ R n \mathbf{x}_i\in\mathbb{R}^n xi∈Rn为坐标, n n n为像素个数
令 a = [ a i ] i \mathbf{a} = \left[a_i\right]_i a=[ai]i,也就是density map转成列向量
真实点图为 B = { ( b j , y j ) } j = 1 m \mathcal{B}=\left\{\left(b_j,\mathbb{y}_j\right)\right\}_{j=1}^m B={(bj,yj)}j=1m
其中 y j \mathbf{y}_j yj为坐标, m m m为标注点个数, b j b_j bj为这个点代表的人群数量
这个论文假设 b = [ b j ] j = 1 m \mathbf{b}=\left[b_j\right]_j = \mathbf{1}_m b=[bj]j=1m,也就是说每个点只有一个人
熵正则化的UOT为
L C τ ( A , B ) = min P ∈ R + n × m ⟨ C , P ⟩ − ϵ H ( P ) + τ D 1 ( P 1 m ∣ a ) + τ D 2 ( P T 1 n ∣ b ) \mathcal{L}_{\mathbf{C}}^{\tau}\left(\mathcal{A},\mathcal{B}\right) = \min_{\mathbf{P}\in\mathbb{R}_+^{n\times m}} \left\langle \mathbf{C},\mathbf{P}\right\rangle -\epsilon H\left(\mathbf{P}\right) + \tau D_1\left(\mathbf{P}\mathbf{1}_m|\mathbf{a}\right) +\tau D_2\left(\mathbf{P}^T\mathbf{1}_n|\mathbf{b}\right) LCτ(A,B)=P∈R+n×mmin⟨C,P⟩−ϵH(P)+τD1(P1m∣a)+τD2(PT1n∣b)
其中 C ∈ R + n × m \mathbf{C}\in\mathbb{R}_+^{n\times m} C∈R+n×m是传输代价矩阵, C i , j C_{i,j} Ci,j为将density从 x i \mathbf{x}_i xi搬运到 y j \mathbf{y}_j yj的距离
P \mathbf{P} P为传输矩阵
令 a ^ = P 1 m , b ^ = P T 1 n \hat{\mathbf{a}} = \mathbf{P}\mathbf{1}_m, \hat{\mathbf{b}}=\mathbf{P}^T\mathbf{1}_n a^=P1m,b^=PT1n
这个loss有4个部分
第一部分是传输的loss,目的是将预测的density map往真实标注靠
第二部分是熵 H ( P ) = − ∑ i , j P i , j log P i , j H\left(\mathbf{P}\right) = -\sum_{i,j}P_{i,j}\log P_{i,j} H(P)=−∑i,jPi,jlogPi,j是熵正则化项,用来控制稀疏程度,越大越稀疏(会趋于均匀分布),反之亦然
第三部分就是希望 a ^ \hat{\mathbf{a}} a^靠近 a \mathbf{a} a
第四部分就是希望 b ^ \hat{\mathbf{b}} b^靠近 b \mathbf{b} b
论文里, D 1 D_1 D1取 L 2 L_2 L2的平方
D 2 D_2 D2取 L 1 L_1 L1
代价矩阵
C i , j = e 1 η ( x i , y j ) ∥ x i − y j ∥ 2 C_{i,j} = e^{\frac{1}{\eta\left(x_i,y_j\right)}\|\mathbf{x}_i-\mathbf{y}_j\|_2} Ci,j=eη(xi,yj)1∥xi−yj∥2
这里的 x i , y j \mathbf{x}_i,\mathbf{y}_j xi,yj是经过归一化的
不过要注意,代码里这个 η ( x i , y j ) \eta\left(x_i,y_j\right) η(xi,yj)是常数,默认是 0.6 0.6 0.6
求解
采用的是sinkhorn
P = diag ( u ) K diag ( v ) , K = exp ( − C / ε ) \mathbf{P}=\operatorname{diag}(\mathbf{u}) \mathbf{K} \operatorname{diag}(\mathbf{v}), \quad \mathbf{K}=\exp (-\mathbf{C} / \varepsilon) P=diag(u)Kdiag(v),K=exp(−C/ε)
这里近似 D 1 , D 2 D_1,D_2 D1,D2为KL散度,这样的话有高效的解法
u ( ℓ + 1 ) = ( a K v ( ℓ ) ) τ τ + ϵ , v ( ℓ + 1 ) = ( b K ⊤ u ( ℓ + 1 ) ) τ τ + ϵ \mathbf{u}^{(\ell+1)}=\left(\frac{\boldsymbol{a}}{\mathbf{K} \mathbf{v}^{(\ell)}}\right)^{\frac{\tau}{\tau+\epsilon}}, \quad \mathbf{v}^{(\ell+1)}=\left(\frac{\boldsymbol{b}}{\mathbf{K}^{\top} \mathbf{u}^{(\ell+1)}}\right)^{\frac{\tau}{\tau+\epsilon}} u(ℓ+1)=(Kv(ℓ)a)τ+ϵτ,v(ℓ+1)=(K⊤u(ℓ+1)b)τ+ϵτ
(其实即使是 K L KL KL散度,他代码似乎也不能这么写)
代码
数据集
预处理
用的是UCF-QNRF
预处理:
1.让 h , w h,w h,w中较小的那个,处于 [ 512 , 2048 ] \left[512,2048\right] [512,2048]的范围,另一个按照缩放比例调整
2.过滤不在图片中的点
3.额外计算每个点到其他点的一个距离,具体地
P = ( p 1 T p 2 T ⋮ p m T ) , p i ∈ R 2 \mathbf{P} = \begin{pmatrix} \mathbf{p}_1^T\\ \mathbf{p}_2^T\\ \vdots\\ \mathbf{p}_m^T \end{pmatrix},\quad \mathbf{p}_i\in\mathbb{R}^2 P= p1Tp2T⋮pmT ,pi∈R2
d i s = [ ∥ p i − p j ∥ ] i , j \mathbf{dis} = \left[\|\mathbf{p}_i-\mathbf{p}_j\|\right]_{i,j} dis=[∥pi−pj∥]i,j
最后对每一行进行快排的那个选择哨兵的过程,找到第3个(从0开始数)
对第 1 , 2 , 3 1,2,3 1,2,3个元素取平均(从0开始数)
def find_dis(point):a = point[:, None, :]b = point[None, ...]dis = np.linalg.norm(a - b, ord=2, axis=-1) # dis_{i,j} = ||p_i - p_j||# mean(4th_min, 2 of the [1st_min, 2nd_min, 3rd_min])dis = np.mean(np.partition(dis, 3, axis=1)[:, 1:4], axis=1, keepdims=True)return dis
因此得到的标签为
P = [ ( x i , y i , d i s i ) ] i ∈ R m × 3 \mathbf{P}=\left[\left(x_i,y_i,dis_i\right)\right]_i\in\mathbb{R}^{m\times 3} P=[(xi,yi,disi)]i∈Rm×3
读取数据
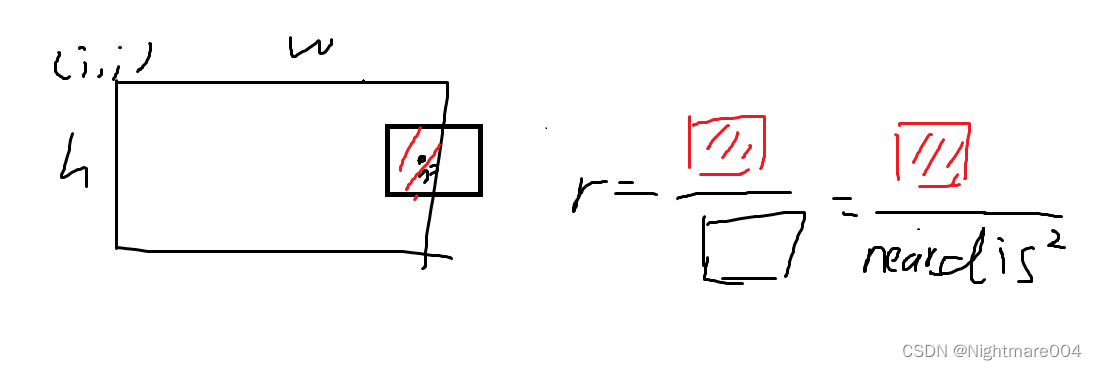
随机裁剪图片,到 ( 512 , 512 ) \left(512,512\right) (512,512)
设 i , j i,j i,j为裁剪的左上角坐标, h = w = 512 h=w=512 h=w=512
接着读取标签
根据 d i s dis dis来设定一个小矩形
计算这个矩形在裁剪范围的面积,和矩形面积的 1 4 \frac{1}{4} 41
如果这个比例大于0.3,就选择这个点,否则舍弃
然后其他的就是随机水平翻转
模型
vgg19+上采样+两层卷积+abs
训练
注意这里sinkhorn是有 ϵ − scaling heuristic \epsilon-\text{scaling heuristic} ϵ−scaling heuristic的这样可以做到20轮以内收敛
为了数值稳定,还用了 log-domain \text{log-domain} log-domain
结果
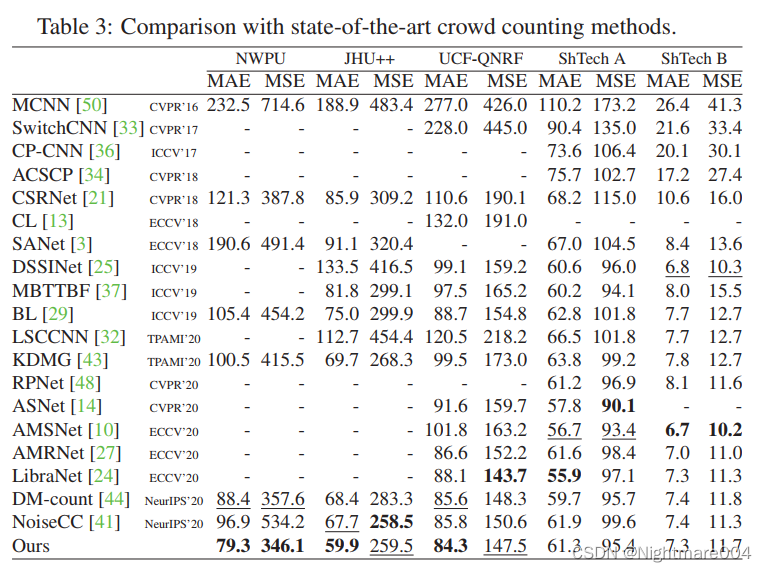
作者的提供的模型的结果:mae 85.09911092883813, mse 150.88815648865386
我在UCF-QNRF跑的结果:mae:85.69232401590861, mse:155.30853159819492
相关文章:
A Generalized Loss Function for Crowd Counting and Localization阅读笔记
简单来说,就是用了UOT来解决人群计数问题 代码:https://github.com/jia-wan/GeneralizedLoss-Counting-Pytorch.git 我改了一点的:https://github.com/Nightmare4214/GeneralizedLoss-Counting-Pytorch.git loss 设density map为 A { ( a…...

SocketD协议单链接双向RPC模式怎么实现
SocketD是一个基于Socket的通信框架,支持单链接双向RPC模式。在实现单链接双向RPC模式时,需要按照一定的协议进行通信,以下是一个简单的实现示例: 定义通信协议:首先,需要定义客户端和服务端之间的通信协议…...

apache poi 设置背景颜色
apache poi 设置背景颜色 要设置 Apache POI 中 HSSFCellStyle 的背景颜色,你可以按照以下步骤进行操作: 首先,创建一个 HSSFWorkbook 对象来表示你的 Excel 工作簿: HSSFWorkbook workbook new HSSFWorkbook();然后ÿ…...

Vue2-Vue3组件间通信-EventBus方式-函数封装
Vue3中采用EventBus方式进行组件间通信与Vue2有一定区别 1.创建EventBus 在Vue2中,我们可以在main.js中创建一个全局的EventBus,代码如下: // EventBus.js import Vue from vue const EventBus new Vue() export default EventBus// main.…...

【SpringBoot】| SpringBoot 和 web组件
目录 一:SpringBoot 和 web组件 1. SpringBoot中使用拦截器(重点) 2. SpringBoot中使用Servlet 3. SpringBoot中使用过滤器(重点) 4. 字符集过滤器的应用 一:SpringBoot 和 web组件 1. SpringBoot中使…...
dflow工作流使用1——架构和基本概念
对于容器技术、工作流等概念完全不懂的情况下理解dflow的工作方式会很吃力,这里记录一下个人理解。 dflow涉及的基本概念 工作流的概念很好理解,即某个项目可以分为多个步骤,每个步骤可以实现独立运行,只保留输入输出接口&#x…...
python小游戏课程设计报告,python游戏课程设计报告
大家好,给大家分享一下python2048游戏课程设计报告,很多人还不知道这一点。下面详细解释一下。现在让我们来看看!...
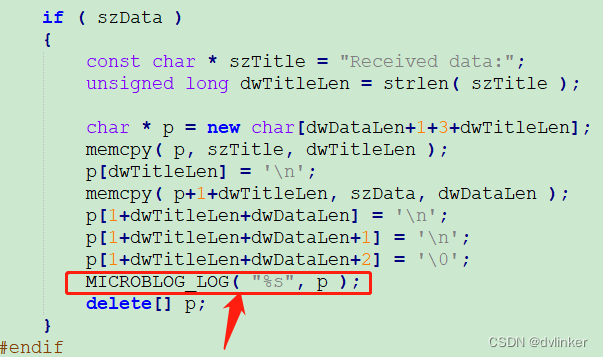
使用Windbg分析从系统应用程序日志中找到的系统自动生成的dump文件去排查问题
目录 1、尝试将Windbg附加到目标进程上进行动态调试,但Windbg并没有捕获到 2、在系统应用程序日志中找到了系统在程序发生异常时自动生成的dump文件 2.1、查看应用程序日志的入口 2.2、在应用程序日志中找到系统自动生成的dump文件 3、使用Windbg静态分析dump文…...
后端技术趋势指南|如何选择自己的技术方向
编程多条路,条条通罗马 后台大佬 后台路线都是面对后台服务器业务,比如web后台服务器,视频后台服务器,搜索后台服务器,游戏后台服务器,直播后台服务器,社交IM后台服务器等等,大部分…...

Delphi XE的原生JSONObject如何判断键值是否存在?
【问题现象】 Delphi XE的原生JSONObject,取出键值的时候如下: //json是传入的参数,里面包括"food_name"等之类的键值,没有food_type键值 procedure XXXXFunciton(json:TJSONObject) var strFoodName,strFoodType:S…...

Go Runtime功能初探
以下内容,是对 运行时 runtime的神奇用法[1] 的学习与记录 目录: 1.获取GOROOT环境变量 2.获取GO的版本号 3.获取本机CPU个数 4.设置最大可同时执行的最大CPU数 5.设置cup profile 记录的速录 6.查看cup profile 下一次堆栈跟踪数据 7.立即执行一次垃圾回收 8.给变量…...
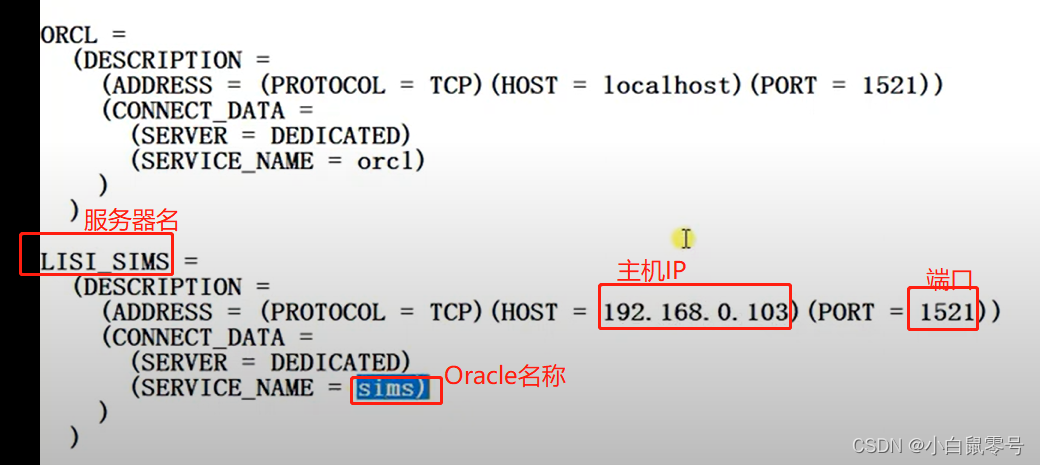
01|Oracle学习(监听程序、管理工具、PL/SQL Developer、本地网络服务介绍)
基础概念 监听程序:运行在Oracle服务器端用于侦听客户端请求的程序。 相当于保安,你来找人,他会拦你,问你找谁。他去帮你叫人过来。 配置监听程序应用场景 Oracle数据库软件安装之后没有监听程序(服务)…...
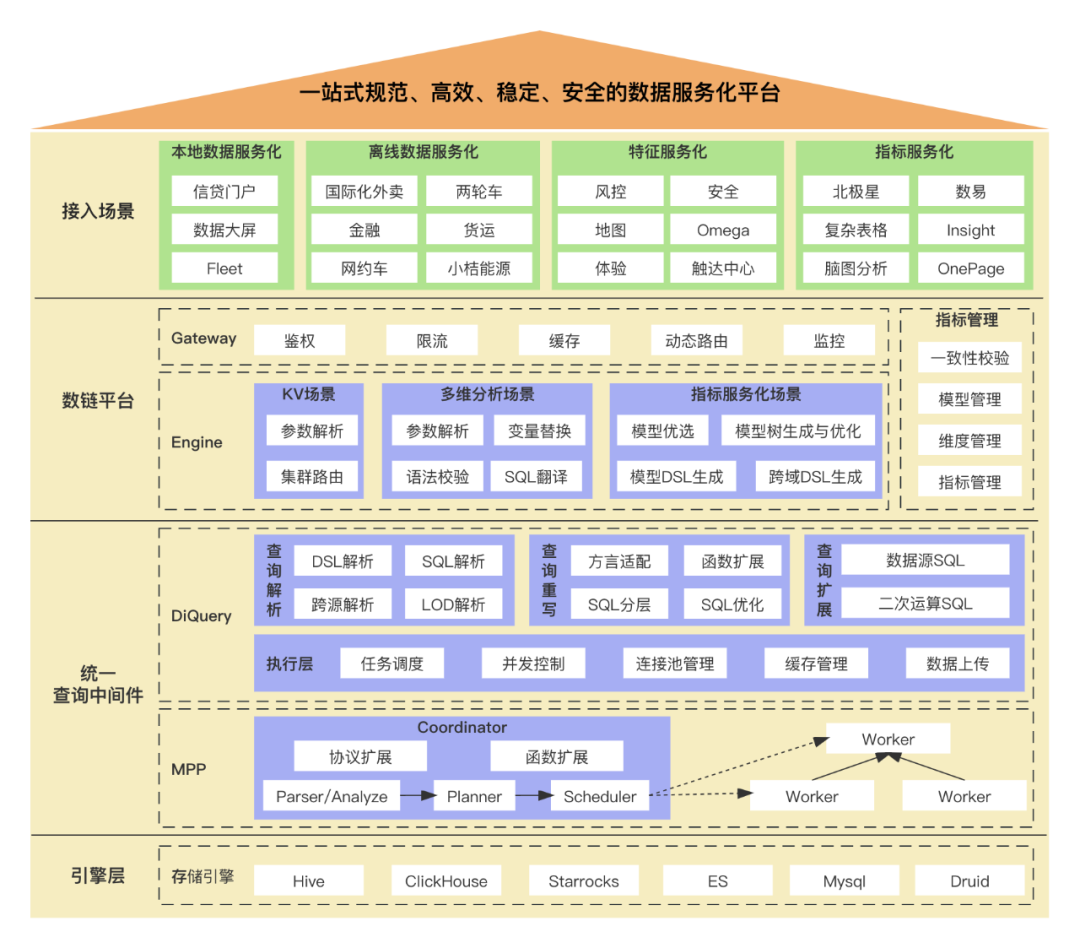
滴滴数据服务体系建设实践
什么是数据服务化 大数据开发的主要流程分为数据集成、数据开发、数据生产和数据回流四个阶段。数据集成打通了业务系统数据进入大数据环境的通道,通常包含周期性导入离线表、实时采集并清洗导入离线表和实时写入对应数据源三种方式,当前滴滴内部同步中心…...

VBA技术资料MF36:VBA_在Excel中排序
【分享成果,随喜正能量】一个人的气质,并不在容颜和身材,而是所经历过的往事,是内在留下的印迹,令人深沉而安谧。所以,优雅是一种阅历的凝聚;淡然是一段人生的沉淀。时间会让一颗灵魂࿰…...

Shell脚本学习3
文章目录 Shell脚本学习3函数函数定义及使用函数参数获取函数返回值 重定向输入输出重定向 其他Here Document/dev/null 文件Shell文件包含获取当前正在执行脚本的绝对路径按特定字符串截取字符串 Shell脚本学习3 函数 函数定义及使用 函数可以让我们将一个复杂功能划分成若…...

代理模式--静态代理和动态代理
1.代理模式 定义:代理模式就是代替对象具备真实对象的功能,并代替真实对象完成相应的操作并且在不改变真实对象源代码的情况下扩展其功能,在某些情况下,⼀个对象不适合或者不能直接引⽤另⼀个对象,⽽代理对象可以在客户…...
C++容器——list的模拟实现
目录 一.list的基本结构 二. 接下来就是对list类构造函数的设计了: 三.链表数据的增加: 四.接下来就是迭代器的创建了: 四.简单函数的实现: 五.构造与析构 六.拷贝构造和赋值重载 传统写法: 现代写法: 七.迭…...

VUE3 祖孙组件传值调用方法
1.在 Vue 3 中,你可以使用 provide/inject 来实现祖孙组件之间的传值和调用方法。 首先,在祖组件中使用 provide 来提供数据或方法,例如: // 祖组件 import { provide } from vue;export default {setup() {const data Hello;c…...

我的网安之路
机缘 我目前从事网安工作,一转眼我从发布的第一篇文章到现在已经过去了4年了,感慨时间过得很快 曾经我是一名Java开发工程师所以我的第一篇文章是跟开发相关的那个时候还是实习生被安排 一个很难的工作是完成地图实时定位以及根据GPS信息模拟海上追捕,这对刚入职的我来说很难 …...

langchain-ChatGLM源码阅读:webui.py
样式定制 使用gradio设置页面的视觉组件和交互逻辑 import gradio as gr import shutilfrom chains.local_doc_qa import LocalDocQA from configs.model_config import * import nltk import models.shared as shared from models.loader.args import parser from models.load…...

AI模型GUI开发实战:从架构设计到部署的完整指南
1. 项目概述:一个为AI模型打造的图形化交互界面最近在GitHub上看到一个挺有意思的项目,叫GrahamMiranda-AI/openclaw-model-gui。光看名字,就能猜个八九不离十:这大概率是一个为某个名为“OpenClaw”的AI模型配套开发的图形用户界…...

开源机械臂技能化控制:从硬件驱动到应用集成的实践指南
1. 项目概述:从开源机械臂到技能控制台最近在机器人控制领域,一个名为esmatcm/openclaw-control-console-skill的项目引起了我的注意。乍一看,这像是一个围绕开源机械臂OpenClaw的控制台技能项目。作为一名长期混迹于硬件开源社区和机器人应用…...

WCH CH348L USB转多串口芯片实战:6路UART+2路RS485工业网关设计与电平兼容方案
1. CH348L芯片深度解析:为什么它是工业网关的理想选择 第一次拿到CH348L这颗芯片的时候,我正被一个工业现场的数据采集项目折磨得焦头烂额。现场有6台不同品牌的PLC需要通过串口通信,还有2个RS485总线的温控器需要接入,传统的解决…...

Motrix WebExtension:浏览器下载加速的终极解决方案
Motrix WebExtension:浏览器下载加速的终极解决方案 【免费下载链接】motrix-webextension A browser extension for the Motrix Download Manager and its forks 项目地址: https://gitcode.com/gh_mirrors/mo/motrix-webextension 在当今数字时代ÿ…...

基于ChatGPT与飞书开放平台构建企业级智能聊天机器人实践指南
1. 项目概述:当ChatGPT遇上飞书,打造你的专属智能工作伙伴 最近在折腾一个挺有意思的项目,叫“chatgpt-for-chatbot-feishu”。简单来说,这就是一个桥梁,一个能让OpenAI的ChatGPT模型,直接接入到飞书&…...
自学避坑指南:这些印刷错误和公式笔误你遇到了吗?)
信号与线性系统分析(吴大正第5版)自学避坑指南:这些印刷错误和公式笔误你遇到了吗?
信号与线性系统分析(吴大正第5版)自学避坑指南:这些印刷错误和公式笔误你遇到了吗? 当你独自面对《信号与线性系统分析》这本经典教材时,是否曾因某个公式推导卡壳数小时?是否反复检查自己的计算步骤&#…...

基于节点电价的电网对电动汽车接纳能力评估模型研究附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、程序设计科研仿真。 🍎完整代码获取 定制创新 论文复现点击:Matlab科研工作室 👇 关注我领取海量matlab电子书和数学建模资料 &…...

GDB断点管理保姆级指南:从查看、删改到批量操作,告别调试混乱
GDB断点管理保姆级指南:从查看、删改到批量操作,告别调试混乱 调试大型C/C项目时,断点管理往往成为工程师的痛点。想象一下,当你在一个包含数十个源文件的项目中设置了50多个断点,每次调试时都要在密密麻麻的断点列表中…...

实战指南:深度掌握5大梯度下降优化器的可视化秘籍
实战指南:深度掌握5大梯度下降优化器的可视化秘籍 【免费下载链接】gradient_descent_viz interactive visualization of 5 popular gradient descent methods with step-by-step illustration and hyperparameter tuning UI 项目地址: https://gitcode.com/gh_mi…...

如何快速掌握Winhance中文版:Windows优化终极指南
如何快速掌握Winhance中文版:Windows优化终极指南 【免费下载链接】Winhance-zh_CN A Chinese version of Winhance. C# application designed to optimize and customize your Windows experience. 项目地址: https://gitcode.com/gh_mirrors/wi/Winhance-zh_CN …...