【图像分类】CNN+Transformer结合系列.3
介绍两篇图像分类的论文:ResMLP(arXiv2305),MetaFormer(CVPR2022),两者都与Transformer有关系,前者基于transformer结构的特点设计ResMLP,后者认为宏观架构才是Transformer成功的原因并设计一个简单的PoolFormer结构。
ResMLP: Feedforward networks for image classification with data-efficient training, arXiv2105
论文:https://arxiv.org/abs/2105.03404
代码:https://github.com/rishikksh20/ResMLP-pytorch
解读:【图像分类】2022-ResMLP_resmlp代码_說詤榢的博客-CSDN博客
论文阅读:ResMLP: Feedforward networks for image classification with data-efficient training_多层感知机的经典论文_Phoenixtree_DongZhao的博客-CSDN博客
摘要
研究内容:本文提出了基于多层感知器的图像分类体系结构 ResMLP。
方法介绍:它是一种简单的残差网络,它可以替代
(i) 一个线性层,其中图像小块在各个通道之间独立而相同地相互作用,以及
(ii)一个两层前馈网络,其中每个通道在每个小块之间独立地相互作用。
实验结论:当使用大量数据增强和选择性蒸馏的现代训练策略进行训练时,它在 ImageNet 上获得了惊人的准确性/复杂度权衡。
本文还在自监督设置中训练 ResMLP 模型,以进一步去除使用标记数据集的先验。
最后,通过将模型应用于机器翻译,取得了令人惊讶的良好结果。
ResMLP方法
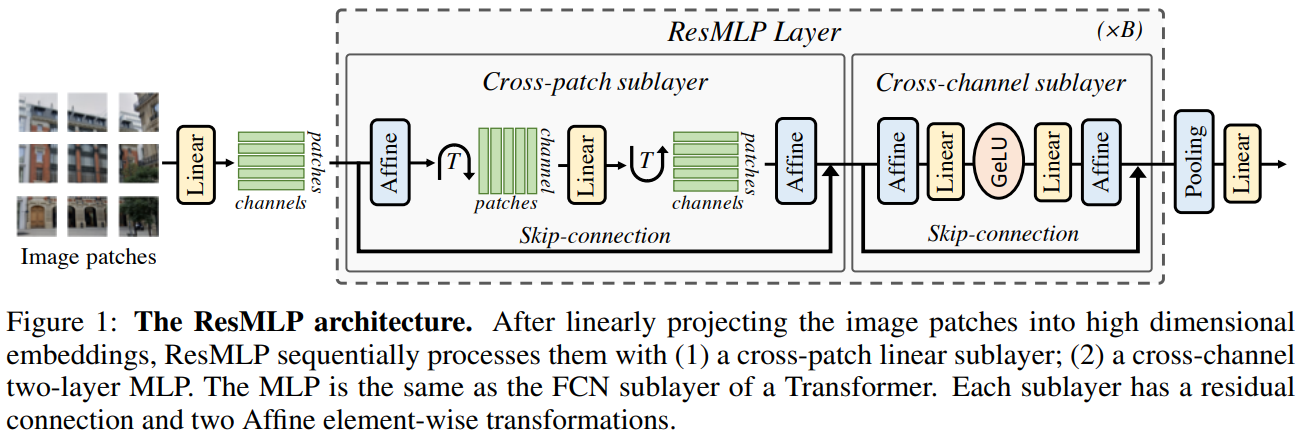
网络的基本block包括一个linear层和一个MLP,其中linear层完成patchs间的信息交互,而MLP则是各个patch的channel间的信息交互。
ResMLP,以N × N个不重叠的 patch 组成的网格作为输入,其中 patch 的大小通常等于16 × 16 。然后,这些 patches 独立通过一层线性层,形成一组维的embeddings。
所得的 embeddings 集合被输入到一个残差多层感知器层序列中,以产生一组
维输出 embeddings。然后,这些输出嵌入被平均 (“平均池化”) 作为一个 d 维向量来表示图像,该向量被送入线性分类器,以预测与图像相关的标签。训练使用交叉熵损失。

The Residual Multi-Perceptron Layer
ResMLP并没有采用LayerNorm,而是采用了一种Affine transformation来进行norm,这种norm方式不需要像LayerNorm那样计算统计值来做归一化,而是直接用两个学习的参数α和β做线性变换。
本文的网络是一系列具有相同结构的层:一个应用于 cross-patch 的线性子层,然后是应用于 cross-channel 的前馈子层。与 Transformer 层类似,每个子层都与跳接并行。self-attention 层的缺失使得训练更加稳定,允许用一个更简单的仿射变换替换层归一化,放射变换如下 所示。
![]()
其中 α 和 β 是可学习的权向量。此操作仅对输入元素进行缩放和移动。
与其他归一化操作相比,这个操作有几个优点:
- 首先,与 Layer Normalization 相比,它在推断时间上没有成本,因为它可以被相邻的线性层吸收。
- 其次,与 BatchNorm 和 Layer Normalization 相反,Aff 操作符不依赖于批统计。
- 与Aff 更接近的算符是 Touvron et al. 引入的 LayerScale,带有额外的偏差项。
为方便起见,用 Aff(X) 表示独立应用于矩阵 X 的每一列的仿射运算。
在每个残差块的开始 (“预归一化”) 和结束 (“后归一化”) 处应用Aff算子,作为一种预规范化Aff取代了 LayerNorm,而不使用通道统计。初始化α=1,β=0。作为后规范化,Aff类似于LayerScale。
ResMLP流程:将一组维的输入特征堆叠在一个
矩阵X中,并输出一组
维输出特征,堆叠在一个矩阵Y中。其中 A, B 和 C 是该层的主要可学习权矩阵。

Differences with the Vision Transformer architecture
与 Vision Transformer 架构的差异:
ResMLP 体系结构与 ViT 模型密切相关。然而,ResMLP 与 ViT 不同,有几个简化:
• 无 self-attention 块:其被一个没有非线性的线性层所取代,
• 无位置 embedding:线性层隐式编码关于 embedding 位置的信息,
• 没有额外的 “class” tokens:只是在 patch embedding 上使用平均池化,
• 不基于 batch 统计的规范化:使用可学习的仿射运算符。
关键代码
# https://github.com/rishikksh20/ResMLP-pytorchimport torch
import numpy as np
from torch import nn
from einops.layers.torch import Rearrangeclass Aff(nn.Module):def __init__(self, dim):super().__init__()self.alpha = nn.Parameter(torch.ones([1, 1, dim]))self.beta = nn.Parameter(torch.zeros([1, 1, dim]))def forward(self, x):x = x * self.alpha + self.betareturn xclass FeedForward(nn.Module):def __init__(self, dim, hidden_dim, dropout = 0.):super().__init__()self.net = nn.Sequential(nn.Linear(dim, hidden_dim),nn.GELU(),nn.Dropout(dropout),nn.Linear(hidden_dim, dim),nn.Dropout(dropout))def forward(self, x):return self.net(x)class MLPblock(nn.Module):def __init__(self, dim, num_patch, mlp_dim, dropout = 0., init_values=1e-4):super().__init__()self.pre_affine = Aff(dim)self.token_mix = nn.Sequential(Rearrange('b n d -> b d n'),nn.Linear(num_patch, num_patch),Rearrange('b d n -> b n d'),)self.ff = nn.Sequential(FeedForward(dim, mlp_dim, dropout),)self.post_affine = Aff(dim)self.gamma_1 = nn.Parameter(init_values * torch.ones((dim)), requires_grad=True)self.gamma_2 = nn.Parameter(init_values * torch.ones((dim)), requires_grad=True)def forward(self, x):x = self.pre_affine(x)x = x + self.gamma_1 * self.token_mix(x)x = self.post_affine(x)x = x + self.gamma_2 * self.ff(x)return xclass ResMLP(nn.Module):def __init__(self, in_channels, dim, num_classes, patch_size, image_size, depth, mlp_dim):super().__init__()assert image_size % patch_size == 0, 'Image dimensions must be divisible by the patch size.'self.num_patch = (image_size// patch_size) ** 2self.to_patch_embedding = nn.Sequential(nn.Conv2d(in_channels, dim, patch_size, patch_size),Rearrange('b c h w -> b (h w) c'),)self.mlp_blocks = nn.ModuleList([])for _ in range(depth):self.mlp_blocks.append(MLPblock(dim, self.num_patch, mlp_dim))self.affine = Aff(dim)self.mlp_head = nn.Sequential(nn.Linear(dim, num_classes))def forward(self, x):x = self.to_patch_embedding(x)for mlp_block in self.mlp_blocks:x = mlp_block(x)x = self.affine(x)x = x.mean(dim=1)return self.mlp_head(x)if __name__ == "__main__":img = torch.ones([1, 3, 224, 224])model = ResMLP(in_channels=3, image_size=224, patch_size=16, num_classes=1000,dim=384, depth=12, mlp_dim=384*4)parameters = filter(lambda p: p.requires_grad, model.parameters())parameters = sum([np.prod(p.size()) for p in parameters]) / 1_000_000print('Trainable Parameters: %.3fM' % parameters)out_img = model(img)print("Shape of out :", out_img.shape) # [B, in_channels, image_size, image_size]
MetaFormer Is Actually What You Need for Vision, CVPR2022
论文:https://arxiv.org/abs/2111.11418
代码:https://github.com/sail-sg/poolformer
解读:【图像分类】2022-MetaFormer CVPR_cvpr2022图像分类论文_說詤榢的博客-CSDN博客
MetaFormer:宏观架构才是通用视觉模型真正需要的! - 知乎 (zhihu.com)
MetaFormer is Actually What You Need for Vision - 知乎 (zhihu.com)
摘要
令牌混合器类型不重要,宏观架构才是通用视觉模型真正需要的.
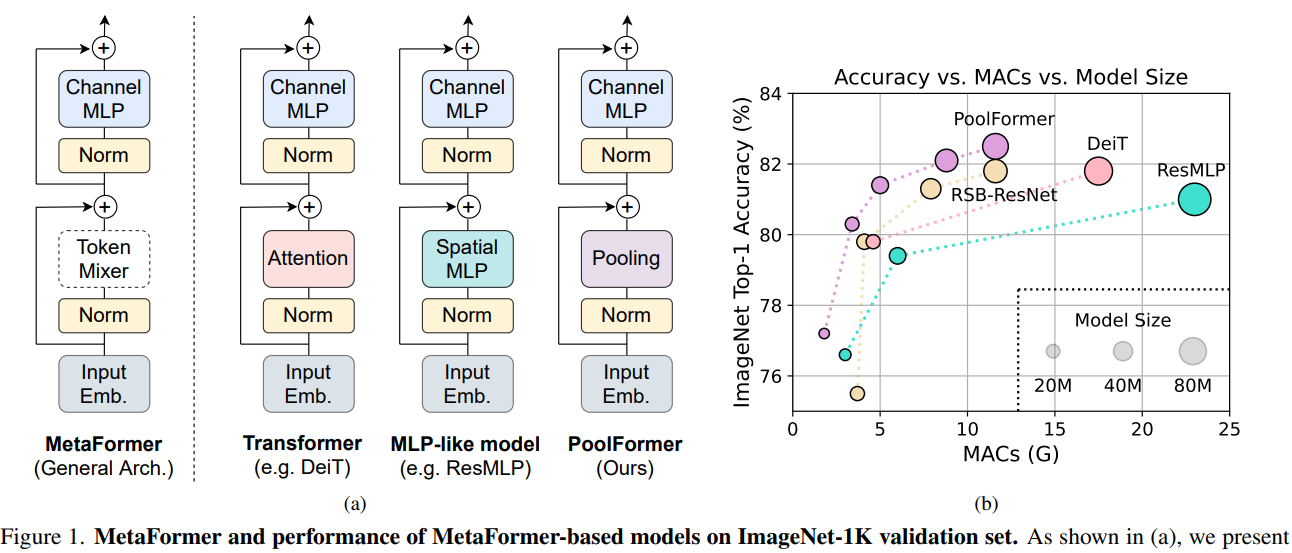
视觉 Transformer 一般性的宏观架构,而不是令牌混合器 (Token Mixer) 对模型的性能更为重要。
本文提出Transformer的成功并不是源于其自注意力结构,而是其广义架构,
通常大家普遍认为基于自注意力的token mixer模块对于Transformer的贡献最大,但最近的工作表明Transformer模型可以被纯MLP 结构替代,并且仍然能够表现得很好,基于这些工作,作者提出了一种假设即Transformer中的自注意力模块并不是最重要的。
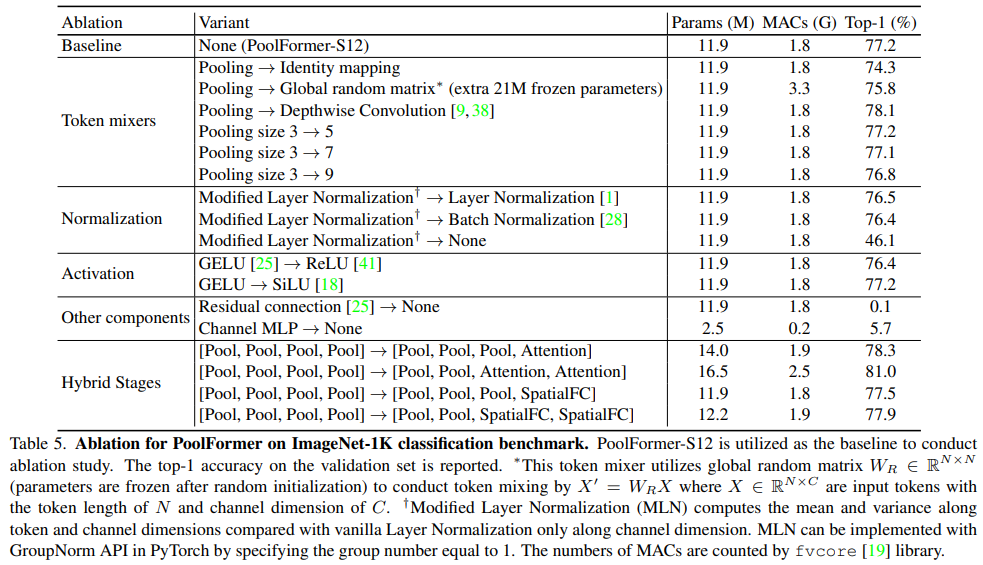
为了证明这个假设,通过一个简单的池化操作来替代attention模块来完成最基本的token mixing, 采用池化操作的原因是,池化不需要参数,并且也能够实现token mixing, 得到的模型称之为PoolFormer。
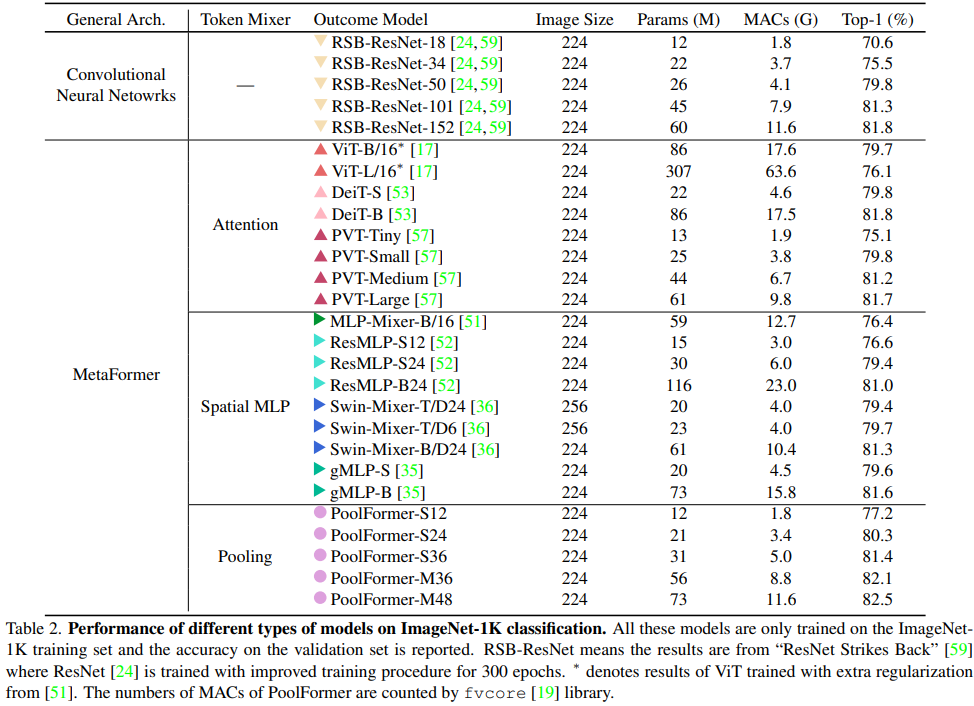
试验结果表明这个模型能够在多个视觉任务中达到很好的表现,比如在ImageNet1K数据集中,能够达到82.1%的准确率,超过DeiT-B(Transformer架构)和ResMLP-B24(MLP架构)的同时还能够大幅减小参数量。
本文的贡献主要有2个方面:
- 首先,将Transformer抽象为一个通用的MetaFormer,并通过经验证明了Transformer/MLP-Like模型的成功很大程度上归因于MetaFormer结构。具体地说,通过只使用一个简单的非参数池化算子作为一个极弱的token mixer,建立了一个简单的模型,发现它仍然可以获得具有很高竞争力的性能。
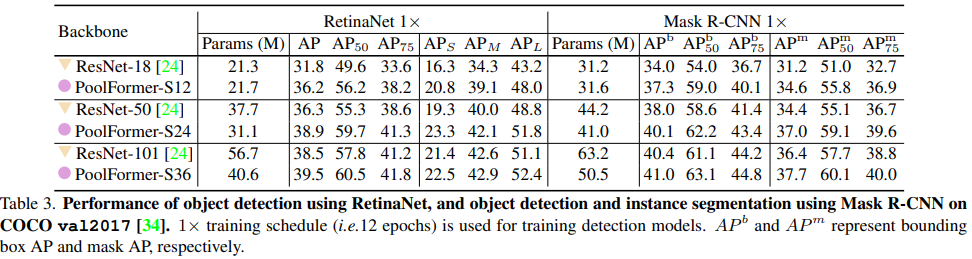
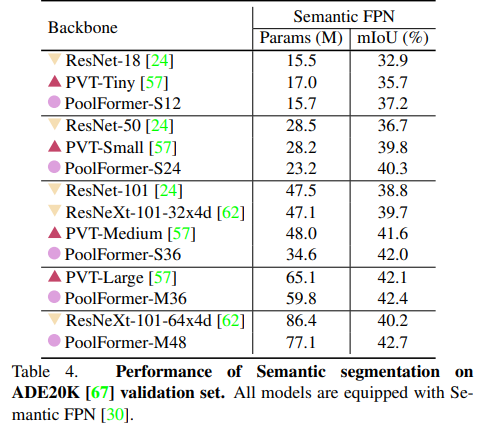
- 其次,对图像分类、目标检测、实例分割和语义分割等多个视觉任务上的PoolFormer进行了评估,发现其与精心设计token mixer的SOTA模型相比具有良好的性能。
PoolFormer方法
从Transformer中抽象出来,MetaFormer是一种通用架构,其中没有指定token mixer,而其他组件与Transformer保持相同。使用一个简单的令牌混合器 (Token Mixer):池化操作 (Pooling)。池化操作只有最最基本的融合不同空间位置信息的能力,它没有任何的权重。
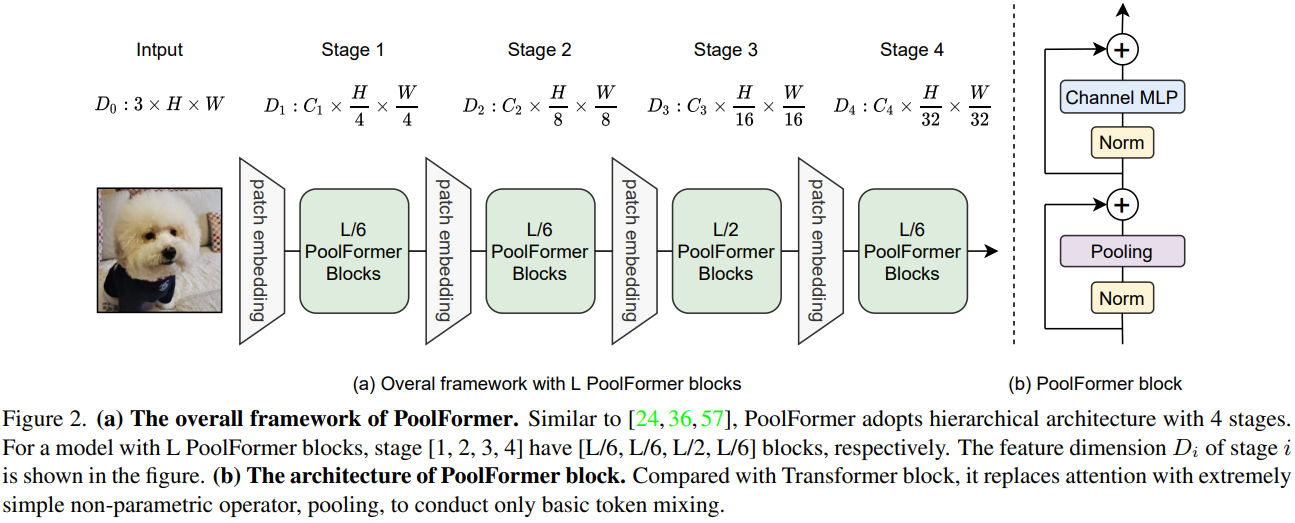
PoolFormer的模型结构

实验

关键代码
# Copyright 2021 Garena Online Private Limited
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""
PoolFormer implementation
"""
import os
import copy
import torch
import torch.nn as nnfrom timm.data import IMAGENET_DEFAULT_MEAN, IMAGENET_DEFAULT_STD
from timm.models.layers import DropPath, trunc_normal_
from timm.models.registry import register_model
from timm.models.layers.helpers import to_2tuple# try:
# from mmseg.models.builder import BACKBONES as seg_BACKBONES
# from mmseg.utils import get_root_logger
# from mmcv.runner import _load_checkpoint
# has_mmseg = True
# except ImportError:
# print("If for semantic segmentation, please install mmsegmentation first")
# has_mmseg = False# try:
# from mmdet.models.builder import BACKBONES as det_BACKBONES
# from mmdet.utils import get_root_logger
# from mmcv.runner import _load_checkpoint
# has_mmdet = True
# except ImportError:
# print("If for detection, please install mmdetection first")
# has_mmdet = Falsedef _cfg(url='', **kwargs):return {'url': url,'num_classes': 1000, 'input_size': (3, 224, 224), 'pool_size': None,'crop_pct': .95, 'interpolation': 'bicubic','mean': IMAGENET_DEFAULT_MEAN, 'std': IMAGENET_DEFAULT_STD, 'classifier': 'head',**kwargs}default_cfgs = {'poolformer_s': _cfg(crop_pct=0.9),'poolformer_m': _cfg(crop_pct=0.95),
}class PatchEmbed(nn.Module):"""Patch Embedding that is implemented by a layer of conv. Input: tensor in shape [B, C, H, W]Output: tensor in shape [B, C, H/stride, W/stride]"""def __init__(self, patch_size=16, stride=16, padding=0, in_chans=3, embed_dim=768, norm_layer=None):super().__init__()patch_size = to_2tuple(patch_size)stride = to_2tuple(stride)padding = to_2tuple(padding)self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=stride, padding=padding)self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()def forward(self, x):x = self.proj(x)x = self.norm(x)return xclass LayerNormChannel(nn.Module):"""LayerNorm only for Channel Dimension.Input: tensor in shape [B, C, H, W]"""def __init__(self, num_channels, eps=1e-05):super().__init__()self.weight = nn.Parameter(torch.ones(num_channels))self.bias = nn.Parameter(torch.zeros(num_channels))self.eps = epsdef forward(self, x):u = x.mean(1, keepdim=True)s = (x - u).pow(2).mean(1, keepdim=True)x = (x - u) / torch.sqrt(s + self.eps)x = self.weight.unsqueeze(-1).unsqueeze(-1) * x \+ self.bias.unsqueeze(-1).unsqueeze(-1)return xclass GroupNorm(nn.GroupNorm):"""Group Normalization with 1 group.Input: tensor in shape [B, C, H, W]"""def __init__(self, num_channels, **kwargs):super().__init__(1, num_channels, **kwargs)class Pooling(nn.Module):"""Implementation of pooling for PoolFormer--pool_size: pooling size"""def __init__(self, pool_size=3):super().__init__()self.pool = nn.AvgPool2d(pool_size, stride=1, padding=pool_size//2, count_include_pad=False)def forward(self, x):return self.pool(x) - xclass Mlp(nn.Module):"""Implementation of MLP with 1*1 convolutions.Input: tensor with shape [B, C, H, W]"""def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):super().__init__()out_features = out_features or in_featureshidden_features = hidden_features or in_featuresself.fc1 = nn.Conv2d(in_features, hidden_features, 1)self.act = act_layer()self.fc2 = nn.Conv2d(hidden_features, out_features, 1)self.drop = nn.Dropout(drop)self.apply(self._init_weights)def _init_weights(self, m):if isinstance(m, nn.Conv2d):trunc_normal_(m.weight, std=.02)if m.bias is not None:nn.init.constant_(m.bias, 0)def forward(self, x):x = self.fc1(x)x = self.act(x)x = self.drop(x)x = self.fc2(x)x = self.drop(x)return xclass PoolFormerBlock(nn.Module):"""Implementation of one PoolFormer block.--dim: embedding dim--pool_size: pooling size--mlp_ratio: mlp expansion ratio--act_layer: activation--norm_layer: normalization--drop: dropout rate--drop path: Stochastic Depth, refer to https://arxiv.org/abs/1603.09382--use_layer_scale, --layer_scale_init_value: LayerScale, refer to https://arxiv.org/abs/2103.17239"""def __init__(self, dim, pool_size=3, mlp_ratio=4., act_layer=nn.GELU, norm_layer=GroupNorm, drop=0., drop_path=0., use_layer_scale=True, layer_scale_init_value=1e-5):super().__init__()self.norm1 = norm_layer(dim)self.token_mixer = Pooling(pool_size=pool_size)self.norm2 = norm_layer(dim)mlp_hidden_dim = int(dim * mlp_ratio)self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)# The following two techniques are useful to train deep PoolFormers.self.drop_path = DropPath(drop_path) if drop_path > 0. \else nn.Identity()self.use_layer_scale = use_layer_scaleif use_layer_scale:self.layer_scale_1 = nn.Parameter(layer_scale_init_value * torch.ones((dim)), requires_grad=True)self.layer_scale_2 = nn.Parameter(layer_scale_init_value * torch.ones((dim)), requires_grad=True)def forward(self, x):if self.use_layer_scale:x = x + self.drop_path(self.layer_scale_1.unsqueeze(-1).unsqueeze(-1)* self.token_mixer(self.norm1(x)))x = x + self.drop_path(self.layer_scale_2.unsqueeze(-1).unsqueeze(-1)* self.mlp(self.norm2(x)))else:x = x + self.drop_path(self.token_mixer(self.norm1(x)))x = x + self.drop_path(self.mlp(self.norm2(x)))return xdef basic_blocks(dim, index, layers, pool_size=3, mlp_ratio=4., act_layer=nn.GELU, norm_layer=GroupNorm, drop_rate=.0, drop_path_rate=0., use_layer_scale=True, layer_scale_init_value=1e-5):"""generate PoolFormer blocks for a stagereturn: PoolFormer blocks """blocks = []for block_idx in range(layers[index]):block_dpr = drop_path_rate * (block_idx + sum(layers[:index])) / (sum(layers) - 1)blocks.append(PoolFormerBlock(dim, pool_size=pool_size, mlp_ratio=mlp_ratio, act_layer=act_layer, norm_layer=norm_layer, drop=drop_rate, drop_path=block_dpr, use_layer_scale=use_layer_scale, layer_scale_init_value=layer_scale_init_value, ))blocks = nn.Sequential(*blocks)return blocksclass PoolFormer(nn.Module):"""PoolFormer, the main class of our model--layers: [x,x,x,x], number of blocks for the 4 stages--embed_dims, --mlp_ratios, --pool_size: the embedding dims, mlp ratios and pooling size for the 4 stages--downsamples: flags to apply downsampling or not--norm_layer, --act_layer: define the types of normalization and activation--num_classes: number of classes for the image classification--in_patch_size, --in_stride, --in_pad: specify the patch embeddingfor the input image--down_patch_size --down_stride --down_pad: specify the downsample (patch embed.)--fork_feat: whether output features of the 4 stages, for dense prediction--init_cfg, --pretrained: for mmdetection and mmsegmentation to load pretrained weights"""def __init__(self, layers, embed_dims=None, mlp_ratios=None, downsamples=None, pool_size=3, norm_layer=GroupNorm, act_layer=nn.GELU, num_classes=1000,in_patch_size=7, in_stride=4, in_pad=2, down_patch_size=3, down_stride=2, down_pad=1, drop_rate=0., drop_path_rate=0.,use_layer_scale=True, layer_scale_init_value=1e-5, fork_feat=False,init_cfg=None, pretrained=None, **kwargs):super().__init__()if not fork_feat:self.num_classes = num_classesself.fork_feat = fork_featself.patch_embed = PatchEmbed(patch_size=in_patch_size, stride=in_stride, padding=in_pad, in_chans=3, embed_dim=embed_dims[0])# set the main block in networknetwork = []for i in range(len(layers)):stage = basic_blocks(embed_dims[i], i, layers, pool_size=pool_size, mlp_ratio=mlp_ratios[i],act_layer=act_layer, norm_layer=norm_layer, drop_rate=drop_rate, drop_path_rate=drop_path_rate,use_layer_scale=use_layer_scale, layer_scale_init_value=layer_scale_init_value)network.append(stage)if i >= len(layers) - 1:breakif downsamples[i] or embed_dims[i] != embed_dims[i+1]:# downsampling between two stagesnetwork.append(PatchEmbed(patch_size=down_patch_size, stride=down_stride, padding=down_pad, in_chans=embed_dims[i], embed_dim=embed_dims[i+1]))self.network = nn.ModuleList(network)if self.fork_feat:# add a norm layer for each outputself.out_indices = [0, 2, 4, 6]for i_emb, i_layer in enumerate(self.out_indices):if i_emb == 0 and os.environ.get('FORK_LAST3', None):# TODO: more elegant way"""For RetinaNet, `start_level=1`. The first norm layer will not used.cmd: `FORK_LAST3=1 python -m torch.distributed.launch ...`"""layer = nn.Identity()else:layer = norm_layer(embed_dims[i_emb])layer_name = f'norm{i_layer}'self.add_module(layer_name, layer)else:# Classifier headself.norm = norm_layer(embed_dims[-1])self.head = nn.Linear(embed_dims[-1], num_classes) if num_classes > 0 \else nn.Identity()self.apply(self.cls_init_weights)self.init_cfg = copy.deepcopy(init_cfg)# load pre-trained model # if self.fork_feat and (# self.init_cfg is not None or pretrained is not None):# self.init_weights()# init for classificationdef cls_init_weights(self, m):if isinstance(m, nn.Linear):trunc_normal_(m.weight, std=.02)if isinstance(m, nn.Linear) and m.bias is not None:nn.init.constant_(m.bias, 0)# init for mmdetection or mmsegmentation by loading # imagenet pre-trained weightsdef init_weights(self, pretrained=None):pass# logger = get_root_logger()# if self.init_cfg is None and pretrained is None:# logger.warn(f'No pre-trained weights for '# f'{self.__class__.__name__}, '# f'training start from scratch')# pass# else:# assert 'checkpoint' in self.init_cfg, f'Only support ' \# f'specify `Pretrained` in ' \# f'`init_cfg` in ' \# f'{self.__class__.__name__} '# if self.init_cfg is not None:# ckpt_path = self.init_cfg['checkpoint']# elif pretrained is not None:# ckpt_path = pretrained## ckpt = _load_checkpoint(# ckpt_path, logger=logger, map_location='cpu')# if 'state_dict' in ckpt:# _state_dict = ckpt['state_dict']# elif 'model' in ckpt:# _state_dict = ckpt['model']# else:# _state_dict = ckpt## state_dict = _state_dict# missing_keys, unexpected_keys = \# self.load_state_dict(state_dict, False)# show for debug# print('missing_keys: ', missing_keys)# print('unexpected_keys: ', unexpected_keys)def get_classifier(self):return self.headdef reset_classifier(self, num_classes):self.num_classes = num_classesself.head = nn.Linear(self.embed_dim, num_classes) if num_classes > 0 else nn.Identity()def forward_embeddings(self, x):x = self.patch_embed(x)return xdef forward_tokens(self, x):outs = []for idx, block in enumerate(self.network):x = block(x)if self.fork_feat and idx in self.out_indices:norm_layer = getattr(self, f'norm{idx}')x_out = norm_layer(x)outs.append(x_out)if self.fork_feat:# output the features of four stages for dense predictionreturn outs# output only the features of last layer for image classificationreturn xdef forward(self, x):# input embeddingx = self.forward_embeddings(x)# through backbonex = self.forward_tokens(x)if self.fork_feat:# otuput features of four stages for dense predictionreturn xx = self.norm(x)cls_out = self.head(x.mean([-2, -1]))# for image classificationreturn cls_outmodel_urls = {"poolformer_s12": "https://github.com/sail-sg/poolformer/releases/download/v1.0/poolformer_s12.pth.tar","poolformer_s24": "https://github.com/sail-sg/poolformer/releases/download/v1.0/poolformer_s24.pth.tar","poolformer_s36": "https://github.com/sail-sg/poolformer/releases/download/v1.0/poolformer_s36.pth.tar","poolformer_m36": "https://github.com/sail-sg/poolformer/releases/download/v1.0/poolformer_m36.pth.tar","poolformer_m48": "https://github.com/sail-sg/poolformer/releases/download/v1.0/poolformer_m48.pth.tar",
}@register_model
def poolformer_s12(pretrained=False, **kwargs):"""PoolFormer-S12 model, Params: 12M--layers: [x,x,x,x], numbers of layers for the four stages--embed_dims, --mlp_ratios: embedding dims and mlp ratios for the four stages--downsamples: flags to apply downsampling or not in four blocks"""layers = [2, 2, 6, 2]embed_dims = [64, 128, 320, 512]mlp_ratios = [4, 4, 4, 4]downsamples = [True, True, True, True]model = PoolFormer(layers, embed_dims=embed_dims, mlp_ratios=mlp_ratios, downsamples=downsamples, **kwargs)model.default_cfg = default_cfgs['poolformer_s']if pretrained:url = model_urls['poolformer_s12']checkpoint = torch.hub.load_state_dict_from_url(url=url, map_location="cpu", check_hash=True)model.load_state_dict(checkpoint)return model@register_model
def poolformer_s24(pretrained=False, **kwargs):"""PoolFormer-S24 model, Params: 21M"""layers = [4, 4, 12, 4]embed_dims = [64, 128, 320, 512]mlp_ratios = [4, 4, 4, 4]downsamples = [True, True, True, True]model = PoolFormer(layers, embed_dims=embed_dims, mlp_ratios=mlp_ratios, downsamples=downsamples, **kwargs)model.default_cfg = default_cfgs['poolformer_s']if pretrained:url = model_urls['poolformer_s24']checkpoint = torch.hub.load_state_dict_from_url(url=url, map_location="cpu", check_hash=True)model.load_state_dict(checkpoint)return model@register_model
def poolformer_s36(pretrained=False, **kwargs):"""PoolFormer-S36 model, Params: 31M"""layers = [6, 6, 18, 6]embed_dims = [64, 128, 320, 512]mlp_ratios = [4, 4, 4, 4]downsamples = [True, True, True, True]model = PoolFormer(layers, embed_dims=embed_dims, mlp_ratios=mlp_ratios, downsamples=downsamples, layer_scale_init_value=1e-6, **kwargs)model.default_cfg = default_cfgs['poolformer_s']# if pretrained:# url = model_urls['poolformer_s36']# checkpoint = torch.hub.load_state_dict_from_url(url=url, map_location="cpu", check_hash=True)# model.load_state_dict(checkpoint)return model@register_model
def poolformer_m36(pretrained=False, **kwargs):"""PoolFormer-M36 model, Params: 56M"""layers = [6, 6, 18, 6]embed_dims = [96, 192, 384, 768]mlp_ratios = [4, 4, 4, 4]downsamples = [True, True, True, True]model = PoolFormer(layers, embed_dims=embed_dims, mlp_ratios=mlp_ratios, downsamples=downsamples, layer_scale_init_value=1e-6, **kwargs)model.default_cfg = default_cfgs['poolformer_m']if pretrained:url = model_urls['poolformer_m36']checkpoint = torch.hub.load_state_dict_from_url(url=url, map_location="cpu", check_hash=True)model.load_state_dict(checkpoint)return model@register_model
def poolformer_m48(pretrained=False, **kwargs):"""PoolFormer-M48 model, Params: 73M"""layers = [8, 8, 24, 8]embed_dims = [96, 192, 384, 768]mlp_ratios = [4, 4, 4, 4]downsamples = [True, True, True, True]model = PoolFormer(layers, embed_dims=embed_dims, mlp_ratios=mlp_ratios, downsamples=downsamples, layer_scale_init_value=1e-6, **kwargs)model.default_cfg = default_cfgs['poolformer_m']if pretrained:url = model_urls['poolformer_m48']checkpoint = torch.hub.load_state_dict_from_url(url=url, map_location="cpu", check_hash=True)model.load_state_dict(checkpoint)return modelif __name__ == '__main__':x=torch.randn(1,3,224,224)model=poolformer_s12(num_classes=10)y=model(x)print(y.shape)# if has_mmseg and has_mmdet:
# """
# The following models are for dense prediction based on
# mmdetection and mmsegmentation
# """
# @seg_BACKBONES.register_module()
# @det_BACKBONES.register_module()
# class poolformer_s12_feat(PoolFormer):
# """
# PoolFormer-S12 model, Params: 12M
# """
# def __init__(self, **kwargs):
# layers = [2, 2, 6, 2]
# embed_dims = [64, 128, 320, 512]
# mlp_ratios = [4, 4, 4, 4]
# downsamples = [True, True, True, True]
# super().__init__(
# layers, embed_dims=embed_dims,
# mlp_ratios=mlp_ratios, downsamples=downsamples,
# fork_feat=True,
# **kwargs)
#
# @seg_BACKBONES.register_module()
# @det_BACKBONES.register_module()
# class poolformer_s24_feat(PoolFormer):
# """
# PoolFormer-S24 model, Params: 21M
# """
# def __init__(self, **kwargs):
# layers = [4, 4, 12, 4]
# embed_dims = [64, 128, 320, 512]
# mlp_ratios = [4, 4, 4, 4]
# downsamples = [True, True, True, True]
# super().__init__(
# layers, embed_dims=embed_dims,
# mlp_ratios=mlp_ratios, downsamples=downsamples,
# fork_feat=True,
# **kwargs)
#
# @seg_BACKBONES.register_module()
# @det_BACKBONES.register_module()
# class poolformer_s36_feat(PoolFormer):
# """
# PoolFormer-S36 model, Params: 31M
# """
# def __init__(self, **kwargs):
# layers = [6, 6, 18, 6]
# embed_dims = [64, 128, 320, 512]
# mlp_ratios = [4, 4, 4, 4]
# downsamples = [True, True, True, True]
# super().__init__(
# layers, embed_dims=embed_dims,
# mlp_ratios=mlp_ratios, downsamples=downsamples,
# layer_scale_init_value=1e-6,
# fork_feat=True,
# **kwargs)
#
# @seg_BACKBONES.register_module()
# @det_BACKBONES.register_module()
# class poolformer_m36_feat(PoolFormer):
# """
# PoolFormer-S36 model, Params: 56M
# """
# def __init__(self, **kwargs):
# layers = [6, 6, 18, 6]
# embed_dims = [96, 192, 384, 768]
# mlp_ratios = [4, 4, 4, 4]
# downsamples = [True, True, True, True]
# super().__init__(
# layers, embed_dims=embed_dims,
# mlp_ratios=mlp_ratios, downsamples=downsamples,
# layer_scale_init_value=1e-6,
# fork_feat=True,
# **kwargs)
#
# @seg_BACKBONES.register_module()
# @det_BACKBONES.register_module()
# class poolformer_m48_feat(PoolFormer):
# """
# PoolFormer-M48 model, Params: 73M
# """
# def __init__(self, **kwargs):
# layers = [8, 8, 24, 8]
# embed_dims = [96, 192, 384, 768]
# mlp_ratios = [4, 4, 4, 4]
# downsamples = [True, True, True, True]
# super().__init__(
# layers, embed_dims=embed_dims,
# mlp_ratios=mlp_ratios, downsamples=downsamples,
# layer_scale_init_value=1e-6,
# fork_feat=True,
# **kwargs)相关文章:
【图像分类】CNN+Transformer结合系列.3
介绍两篇图像分类的论文:ResMLP(arXiv2305),MetaFormer(CVPR2022),两者都与Transformer有关系,前者基于transformer结构的特点设计ResMLP,后者认为宏观架构才是Transform…...
IDA分析实例android_crackme/EasyJNI/Transformers/pingan2
文章目录 第一个实例android_crackme将32位的android_server放到手机目录下给android_server赋予root更改root用户组运行android_serverpc端端口转发安装apk,并运行app打开32位IDA并attach到进程先使用jadx看java层逻辑定位要分析的方法IDA 给两个方法打断点 第二个…...
拿捏--->求一元二次方程的根
文章目录 题目描述算法思路代码示例 题目描述 从键盘输入a, b, c的值,编程计算并输出一元二次方程ax2 bx c 0的根,当a 0时,输出“Not quadratic equation”,当a ≠ 0时,根据△ b2 - 4ac的三种情况计算并输出方程…...
深入浅出之Docker Compose详解
目录 1.Docker Compose概述 1.1 Docker Compose 定义 1.2 Docker Compose产生背景 1.3 Docker Compose 核心概念 1.4 Docker Compose 使用步骤 1.5 Docker Compose 常用命令 2. Docker Compose 实战 2.1 Docker Compose下载和卸载 2.2 Docker Compose 项目概述 2.3 Do…...
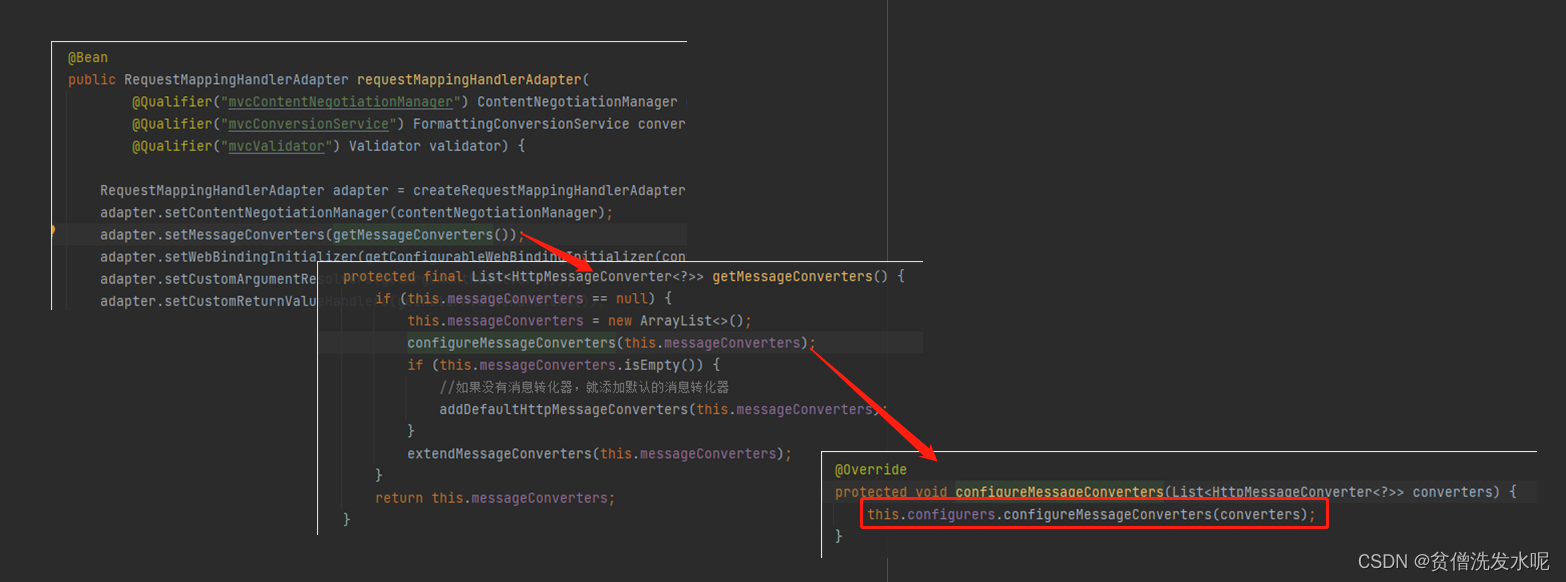
spring5源码篇(12)——spring-mvc请求流程
spring-framework 版本:v5.3.19 文章目录 一、请求流程1、处理器映射器1.1、 RequestMappingHandlerMapping1.2、获取对应的映射方法1.3、添加拦截器 2、获取合适的处理器适配器3、通过处理器适配器执行处理器方法3.1、拦截器的前置后置3.2、处理器的执行3.2.1 参数…...
风辞远的科技茶屋:来自未来的信号枪
很久之前,有位朋友问我,现在科技资讯这么发达了,你们还写啊写做什么呢? 我是这么看的。最终能够凝结为资讯的那个新闻点,其实是一系列事情最终得出的结果,而这个结果又会带来更多新的结果。其中这些“得出”…...

MongoDB教程-8
ObjectId 在之前的所有章节中,我们一直在使用MongoDB的Object Id。在本章中,我们将了解ObjectId的结构。 ObjectId是一个12字节的BSON类型,具有以下结构-- 1. 前4个字节代表自unix epoch以来的秒数 接下来的3个字节是机器标识符 接下来的2…...

Redis 理论部分
前面写了很多redis项目,今天在通过redis的理论加深redis的了解,顺便做个总结 Redis 理论部分 1.redis 速度快的原因 纯内存操作单线程操作,避免频繁的上下文切换以及资源争用的问题,多线程需要占用更多的cpu资源采用非阻塞I/O多…...

Android—Monkey用法
文章目录 Monkey知识 Monkey知识 介绍 Monkey是Android中的一个命令行工具,可以运行在模拟器里或实际设备中。它向系统发送伪随机的用户事件流(如按键输入、触摸屏输入、手势输入等),实现对正在开发的应用程序进行压力测试。Monkey测试是一种为了测试软…...

几个影响 cpu cache 性能因素及 cache 测试工具介绍
》内核新视界文章汇总《 文章目录 1 cache 性能及影响因素1.1 内存访问和性能比较1.2 cache line 对性能的影响1.3 L1 和 L2 缓存大小1.4 指令集并行性对 cache 性能的影响1.5 缓存关联性对 cache 的影响1.6 错误的 cacheline 共享 (缓存一致性)1.7 硬件设计 2 cpu cache benc…...
Java从入门到精通(二)· 基本语法
Java从入门到精通(二) 基本语法 一 变量 1.字面量 计算机是用来处理数据的,字面量就是告诉程序员:数据在程序中的书写格式。 特殊的字符: \n 表示换行, \t 表示一个制表符,即一个tab 2.变量…...
之 面向云原生环境的安全体系)
云安全攻防(三)之 面向云原生环境的安全体系
面向云原生环境的安全体系 根据云原生环境的构成,面向云原生环境的安全体系可包含三个层面的安全体制,它们分别是容器安全、编排系统安全和云原生应用安全,下面,我们逐步来讲解这三点: 容器安全 容器环境࿰…...
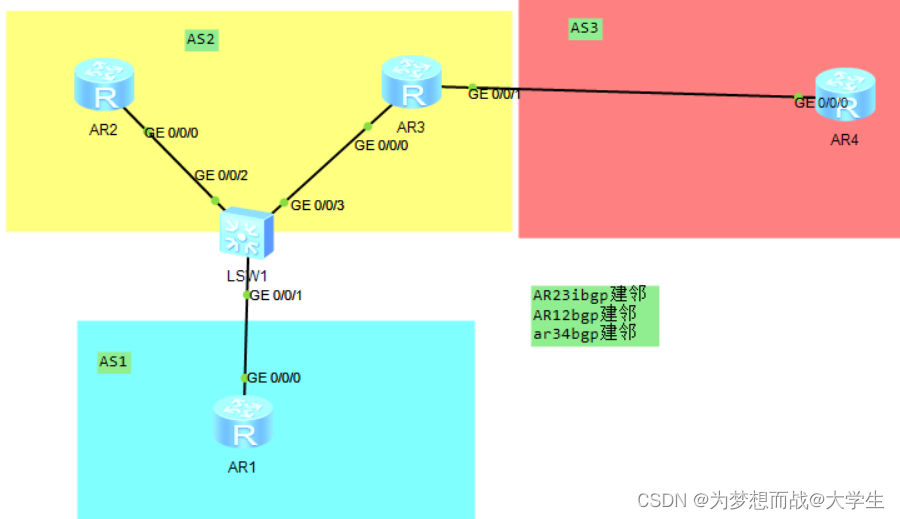
BGP汇总和破解水平分割
一,BGP的宣告问题 在BGP协议中每台运行BGP的设备上,宣告本地直连路由在BGP协议中运行BGP协议的设备来宣告,通过IGP学习到的,未运行BGP协议设备产生的路由; 在BGP协议中宣告本地路由表中路由条目时,将携带本…...

BUG:pm2启动verdaccio报错:Invalid or unexpected toke
输入命令: pm2 state verdaccio 问题描述: pm2 logs verdaccio报错翻译:数据格式错误 导致我呢提原因,没有找到运行文件, 发现问题:因为命令默认查找verdaccio是去系统盘查找。 解决方式 1:…...

Zookeeper笔记
为什么要使用Zookeeper dubbo需要一个注册中心,而Zookeeper是我们在使用Dubbo是官方推荐的注册中心 Zookeeper介绍 Zookeeper的集群机制 Zookeeper是为了其他分布式程序提供服务的,所以不能随便就挂了。Zookeeper的集群机制采取的是半数存活机制。也…...
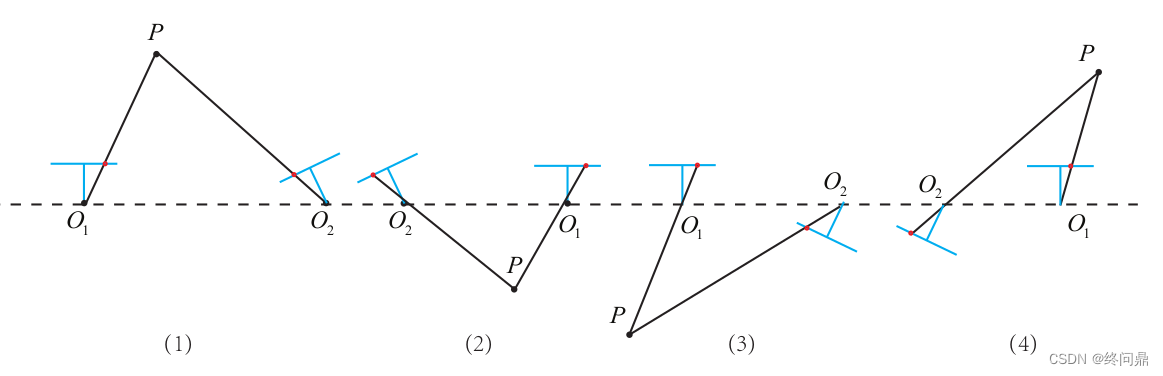
【视觉SLAM入门】5.1. 特征提取和匹配--FAST,ORB(关键点描述子),2D-2D对极几何,本质矩阵,单应矩阵,三角测量,三角化矛盾
"不言而善应" 0. 基础知识1. 特征提取和匹配1.1 FAST关键点1.2 ORB的关键点--改进FAST1.3 ORB的描述子--BRIEF1.4 总结 2. 对极几何,对极约束2.1 本质矩阵(对极约束)2.1.1 求解本质矩阵2.1.2 恢复相机运动 R , t R,t R,…...

【能量管理系统( EMS )】基于粒子群算法对光伏、蓄电池等分布式能源DG进行规模优化调度研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
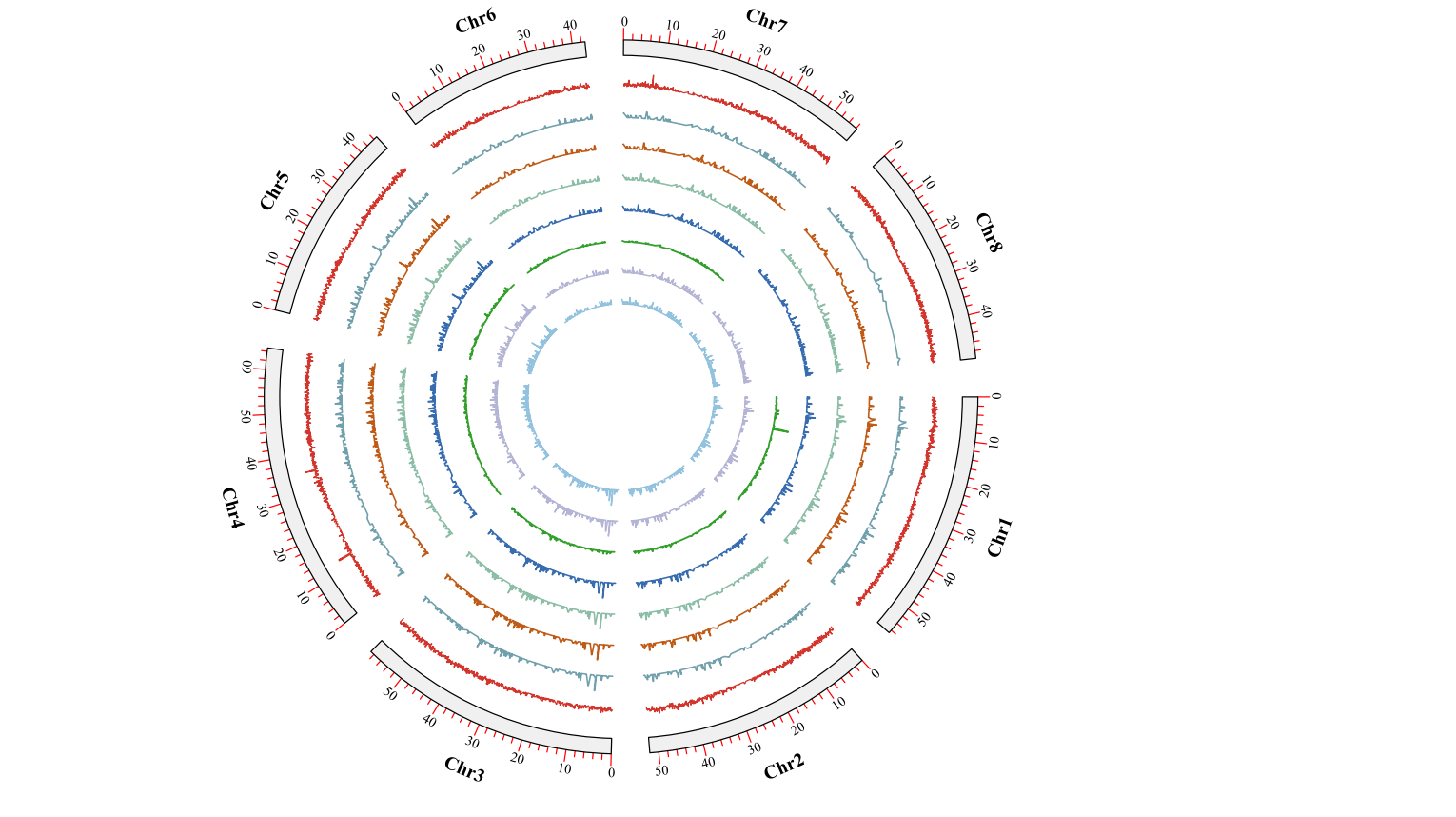
绘制Circos基因圈图
写在前面 昨天在绘制Circos圈图,已经隔了2年左右没有做这类的图了。这时间过得真是快,但是文章和成果依旧是没有很明显的成效。只能安慰自己,后面的时间继续加油吧!关于Cirocs图的制作,我从刚开始到现在都是是使用TBt…...

openGauss学习笔记-26 openGauss 高级数据管理-约束
文章目录 openGauss学习笔记-26 openGauss 高级数据管理-约束26.1 NOT NULL约束26.2 UNIQUE约束26.3 PRIMARY KEY26.4 FOREIGN KEY26.5 CHECK约束 openGauss学习笔记-26 openGauss 高级数据管理-约束 约束子句用于声明约束,新行或者更新的行必须满足这些约束才能成…...

学习React(四)
学习React(四) componentWillMount(被放弃使用)rendercomponentDidMountshouldComponentUpdate(nextProps,nextState)componentWillUpdate(被放弃使用)componentDidUpdatecomponentWillReceiveProps&#x…...

VTube Studio完整指南:从零开始打造你的虚拟主播形象
VTube Studio完整指南:从零开始打造你的虚拟主播形象 【免费下载链接】VTubeStudio VTube Studio API Development Page 项目地址: https://gitcode.com/gh_mirrors/vt/VTubeStudio 想要成为一名虚拟主播,却担心技术门槛太高?VTube St…...

SAP F110自动付款:从零到精通的配置全景图
1. SAP F110自动付款入门指南 第一次接触SAP F110自动付款功能时,我也被那一堆配置项搞得晕头转向。记得当时为了搞清楚银行确定逻辑,整整花了两天时间反复测试。现在回想起来,如果有个系统性的指导手册,至少能节省一半时间。F110…...
)
FPGA驱动ADS1256的ADC精度优化实战(三)
1. 硬件连接优化:从杜邦线到PCB布局的精度跃升 第一次用杜邦线连接FPGA和ADS1256时,我测得的电压误差居然有30mV,这让我差点怀疑人生。后来把万用表直接怼到ADC引脚上,才发现杜邦线本身就有5-8mV的压降波动。这种看似微不足道的干…...

从零到一:基于Ultralytics框架与自定义数据集实战RT-DETR模型训练
1. RT-DETR与Ultralytics框架初探 第一次接触RT-DETR时,我被它的"实时检测Transformer"组合惊艳到了。这个由百度开发的检测器,完美解决了传统Transformer模型在实时场景下的性能瓶颈。不同于YOLO系列的锚框机制,RT-DETR采用端到端…...

解放你的文档下载焦虑:一键保存30+平台内容的神器
解放你的文档下载焦虑:一键保存30平台内容的神器 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚本就是为了解决您…...
)
手把手教你用Vivado 2020.1给MicroBlaze工程挂上DDR3内存(附完整IP核配置流程)
从BRAM到DDR3:MicroBlaze系统内存扩展实战指南 在FPGA嵌入式开发领域,MicroBlaze处理器因其灵活性和可定制性成为众多项目的首选。当系统复杂度从简单的"Hello World"升级到需要处理大量数据时,片上BRAM的有限容量很快会成为瓶颈。…...

UE5《Electric Dreams》项目PCG技术解析 之 基于PCGSettings的模块化关卡构建
1. PCG技术为何成为UE5开发者的新宠 第一次在UE5.2中接触到PCG框架时,那种感觉就像从手动挡汽车换成了自动驾驶。以前用Houdini做程序化生成时,光是处理插件兼容性和资源导入问题就能耗掉大半天。现在原生集成的PCG框架直接把开发效率提升了至少三倍&…...

从0到1搭建AI心理健康预警系统:我是如何用BERT+BiLSTM捕捉情绪拐点的
一、 痛点:为什么通用大模型干不了这活?首先声明,我们不是大模型黑。但在心理预警这个场景下,直接用GPT-4或者文心一言的API,有三个致命伤:成本炸裂: 每天几万条的学生/员工咨询日志ÿ…...

杰理之AutoDuck 闪避节点参数更新结构体【篇】
struct autoduck_update_parm{ int duck_amount; //背景音乐闪避的音量值(dB) int attack; //启动时间(ms) int release; //释放时间(ms) int hold_time; //闪避之后的保持时间 (ms) }; typedef struct AutoDuckParam_TOOL_SET { int is_bypass; struct aut…...

基于ARM核心板的工业无线示教器开发全流程解析
1. 项目概述:当工业机器人遇上“掌上大脑”在工业自动化领域,示教器是人与机器人交互的核心枢纽。传统的示教器,往往体积庞大、线缆缠绕、成本高昂,并且高度依赖特定的控制器硬件。作为一名长期混迹于工控和嵌入式开发一线的工程师…...