计算机毕设 深度学习手势识别 - yolo python opencv cnn 机器视觉
文章目录
- 0 前言
- 1 课题背景
- 2 卷积神经网络
- 2.1卷积层
- 2.2 池化层
- 2.3 激活函数
- 2.4 全连接层
- 2.5 使用tensorflow中keras模块实现卷积神经网络
- 3 YOLOV5
- 3.1 网络架构图
- 3.2 输入端
- 3.3 基准网络
- 3.4 Neck网络
- 3.5 Head输出层
- 4 数据集准备
- 4.1 数据标注简介
- 4.2 数据保存
- 5 模型训练
- 5.1 修改数据配置文件
- 5.2 修改模型配置文件
- 5.3 开始训练模型
- 6 实现效果
- 6.1图片效果
- 6.2 视频效果,摄像头实时效果
- 7 最后
0 前言
🔥 这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
🚩 **基于深度学习加驾驶疲劳与行为检测 **
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:4分
- 工作量:3分
- 创新点:5分

1 课题背景
火灾事故的频发给社会造成不必要的财富损失以及人员伤亡,在当今这个社会消防也是收到越来越多的注视。火灾在发生初期是很容易控制的,因此,如何在对可能发生灾害的场所进行有效监控,使得潜在的损失危害降到最低是当前研究的重点内容。传统的探测器有较大的局限性,感温、感烟的探测器的探测灵敏度相对争分夺秒的灾情控制来说有着时间上的不足,而且户外场所的适用性大大降低。随着计算机视觉的发展,基于深度学习的图像处理技术已经愈发成熟并且广泛应用在当今社会的许多方面,其在人脸识别、安防、医疗、军事等领域已经有相当一段时间的实际应用,在其他领域也展现出跟广阔的前景。利用深度学习图像处理技术对火灾场景下火焰的特征学习、训练神经网络模型自动识别火焰,这项技术可以对具有监控摄像头场景下的火灾火焰进行自动、快速、准确识别并设置预警装置,从而在火灾发生的初期及时响应,赢得更多的时间,把损失降到最低。
2 卷积神经网络
受到人类大脑神经突触结构相互连接的模式启发,神经网络作为人工智能领域的重要组成部分,通过分布式的方法处理信息,可以解决复杂的非线性问题,从构造方面来看,主要包括输入层、隐藏层、输出层三大组成结构。每一个节点被称为一个神经元,存在着对应的权重参数,部分神经元存在偏置,当输入数据x进入后,对于经过的神经元都会进行类似于:y=w*x+b的线性函数的计算,其中w为该位置神经元的权值,b则为偏置函数。通过每一层神经元的逻辑运算,将结果输入至最后一层的激活函数,最后得到输出output。

2.1卷积层
卷积核相当于一个滑动窗口,示意图中3x3大小的卷积核依次划过6x6大小的输入数据中的对应区域,并与卷积核滑过区域做矩阵点乘,将所得结果依次填入对应位置即可得到右侧4x4尺寸的卷积特征图,例如划到右上角3x3所圈区域时,将进行0x0+1x1+2x1+1x1+0x0+1x1+1x0+2x0x1x1=6的计算操作,并将得到的数值填充到卷积特征的右上角。

2.2 池化层
池化操作又称为降采样,提取网络主要特征可以在达到空间不变性的效果同时,有效地减少网络参数,因而简化网络计算复杂度,防止过拟合现象的出现。在实际操作中经常使用最大池化或平均池化两种方式,如下图所示。虽然池化操作可以有效的降低参数数量,但过度池化也会导致一些图片细节的丢失,因此在搭建网络时要根据实际情况来调整池化操作。[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-NsOGzsjj-1658373873444)(C:\Users\Administrator\AppData\Roaming\Typora\typora-user-images\image-20220709114210181.png)]

2.3 激活函数
激活函数大致分为两种,在卷积神经网络的发展前期,使用较为传统的饱和激活函数,主要包括sigmoid函数、tanh函数等;随着神经网络的发展,研宄者们发现了饱和激活函数的弱点,并针对其存在的潜在问题,研宄了非饱和激活函数,其主要含有ReLU函数及其函数变体
2.4 全连接层
在整个网络结构中起到“分类器”的作用,经过前面卷积层、池化层、激活函数层之后,网络己经对输入图片的原始数据进行特征提取,并将其映射到隐藏特征空间,全连接层将负责将学习到的特征从隐藏特征空间映射到样本标记空间,一般包括提取到的特征在图片上的位置信息以及特征所属类别概率等。将隐藏特征空间的信息具象化,也是图像处理当中的重要一环。
2.5 使用tensorflow中keras模块实现卷积神经网络
class CNN(tf.keras.Model):def __init__(self):super().__init__()self.conv1 = tf.keras.layers.Conv2D(filters=32, # 卷积层神经元(卷积核)数目kernel_size=[5, 5], # 感受野大小padding='same', # padding策略(vaild 或 same)activation=tf.nn.relu # 激活函数)self.pool1 = tf.keras.layers.MaxPool2D(pool_size=[2, 2], strides=2)self.conv2 = tf.keras.layers.Conv2D(filters=64,kernel_size=[5, 5],padding='same',activation=tf.nn.relu)self.pool2 = tf.keras.layers.MaxPool2D(pool_size=[2, 2], strides=2)self.flatten = tf.keras.layers.Reshape(target_shape=(7 * 7 * 64,))self.dense1 = tf.keras.layers.Dense(units=1024, activation=tf.nn.relu)self.dense2 = tf.keras.layers.Dense(units=10)def call(self, inputs):x = self.conv1(inputs) # [batch_size, 28, 28, 32]x = self.pool1(x) # [batch_size, 14, 14, 32]x = self.conv2(x) # [batch_size, 14, 14, 64]x = self.pool2(x) # [batch_size, 7, 7, 64]x = self.flatten(x) # [batch_size, 7 * 7 * 64]x = self.dense1(x) # [batch_size, 1024]x = self.dense2(x) # [batch_size, 10]output = tf.nn.softmax(x)return output
3 YOLOV5
我们选择当下YOLO最新的卷积神经网络YOLOv5来进行火焰识别检测。6月9日,Ultralytics公司开源了YOLOv5,离上一次YOLOv4发布不到50天。而且这一次的YOLOv5是完全基于PyTorch实现的!在我们还对YOLOv4的各种高端操作、丰富的实验对比惊叹不已时,YOLOv5又带来了更强实时目标检测技术。按照官方给出的数目,现版本的YOLOv5每个图像的推理时间最快0.007秒,即每秒140帧(FPS),但YOLOv5的权重文件大小只有YOLOv4的1/9。
目标检测架构分为两种,一种是two-stage,一种是one-stage,区别就在于 two-stage 有region proposal过程,类似于一种海选过程,网络会根据候选区域生成位置和类别,而one-stage直接从图片生成位置和类别。今天提到的 YOLO就是一种 one-stage方法。YOLO是You Only Look Once的缩写,意思是神经网络只需要看一次图片,就能输出结果。YOLO 一共发布了五个版本,其中 YOLOv1 奠定了整个系列的基础,后面的系列就是在第一版基础上的改进,为的是提升性能。
YOLOv5有4个版本性能如图所示:

3.1 网络架构图

YOLOv5是一种单阶段目标检测算法,该算法在YOLOv4的基础上添加了一些新的改进思路,使其速度与精度都得到了极大的性能提升。主要的改进思路如下所示:
3.2 输入端
在模型训练阶段,提出了一些改进思路,主要包括Mosaic数据增强、自适应锚框计算、自适应图片缩放;
Mosaic数据增强:Mosaic数据增强的作者也是来自YOLOv5团队的成员,通过随机缩放、随机裁剪、随机排布的方式进行拼接,对小目标的检测效果很不错

3.3 基准网络
融合其它检测算法中的一些新思路,主要包括:Focus结构与CSP结构;
3.4 Neck网络
在目标检测领域,为了更好的提取融合特征,通常在Backbone和输出层,会插入一些层,这个部分称为Neck。Yolov5中添加了FPN+PAN结构,相当于目标检测网络的颈部,也是非常关键的。


FPN+PAN的结构

这样结合操作,FPN层自顶向下传达强语义特征(High-Level特征),而特征金字塔则自底向上传达强定位特征(Low-Level特征),两两联手,从不同的主干层对不同的检测层进行特征聚合。
FPN+PAN借鉴的是18年CVPR的PANet,当时主要应用于图像分割领域,但Alexey将其拆分应用到Yolov4中,进一步提高特征提取的能力。
3.5 Head输出层
输出层的锚框机制与YOLOv4相同,主要改进的是训练时的损失函数GIOU_Loss,以及预测框筛选的DIOU_nms。
对于Head部分,可以看到三个紫色箭头处的特征图是40×40、20×20、10×10。以及最后Prediction中用于预测的3个特征图:
①==>40×40×255②==>20×20×255③==>10×10×255
-
相关代码
class Detect(nn.Module):stride = None # strides computed during buildonnx_dynamic = False # ONNX export parameterdef __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layersuper().__init__()self.nc = nc # number of classesself.no = nc + 5 # number of outputs per anchorself.nl = len(anchors) # number of detection layersself.na = len(anchors[0]) // 2 # number of anchorsself.grid = [torch.zeros(1)] * self.nl # init gridself.anchor_grid = [torch.zeros(1)] * self.nl # init anchor gridself.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output convself.inplace = inplace # use in-place ops (e.g. slice assignment)def forward(self, x):z = [] # inference outputfor i in range(self.nl):x[i] = self.m[i](x[i]) # convbs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()if not self.training: # inferenceif self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)y = x[i].sigmoid()if self.inplace:y[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xyy[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # whelse: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953xy = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xywh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # why = torch.cat((xy, wh, y[..., 4:]), -1)z.append(y.view(bs, -1, self.no))return x if self.training else (torch.cat(z, 1), x)def _make_grid(self, nx=20, ny=20, i=0):d = self.anchors[i].deviceif check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibilityyv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)], indexing='ij')else:yv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)])grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2)).float()anchor_grid = (self.anchors[i].clone() * self.stride[i]) \.view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2)).float()return grid, anchor_grid
4 数据集准备
由于目前针对多源场景下的火焰数据并没有现成的数据集,我们使用使用Python爬虫利用关键字在互联网上获得的图片数据,爬取数据包含室内场景下的火焰、写字楼和房屋燃烧、森林火灾和车辆燃烧等场景下的火焰图片。经过筛选后留下3000张质量较好的图片制作成VOC格式的实验数据集。
深度学习图像标注软件众多,按照不同分类标准有多中类型,本文使用LabelImg单机标注软件进行标注。LabelImg是基于角点的标注方式产生边界框,对图片进行标注得到xml格式的标注文件,由于边界框对检测精度的影响较大因此采用手动标注,并没有使用自动标注软件。
考虑到有的朋友时间不足,博主提供了标注好的数据集和训练好的模型,需要请联系。
4.1 数据标注简介
通过pip指令即可安装
pip install labelimg
在命令行中输入labelimg即可打开

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-f5cQOAtw-1658373873446)(v2-c685ef696eb08477e480b1f185a05a6f_r.jpg)]
打开你所需要进行标注的文件夹,点击红色框区域进行标注格式切换,我们需要yolo格式,因此切换到yolo
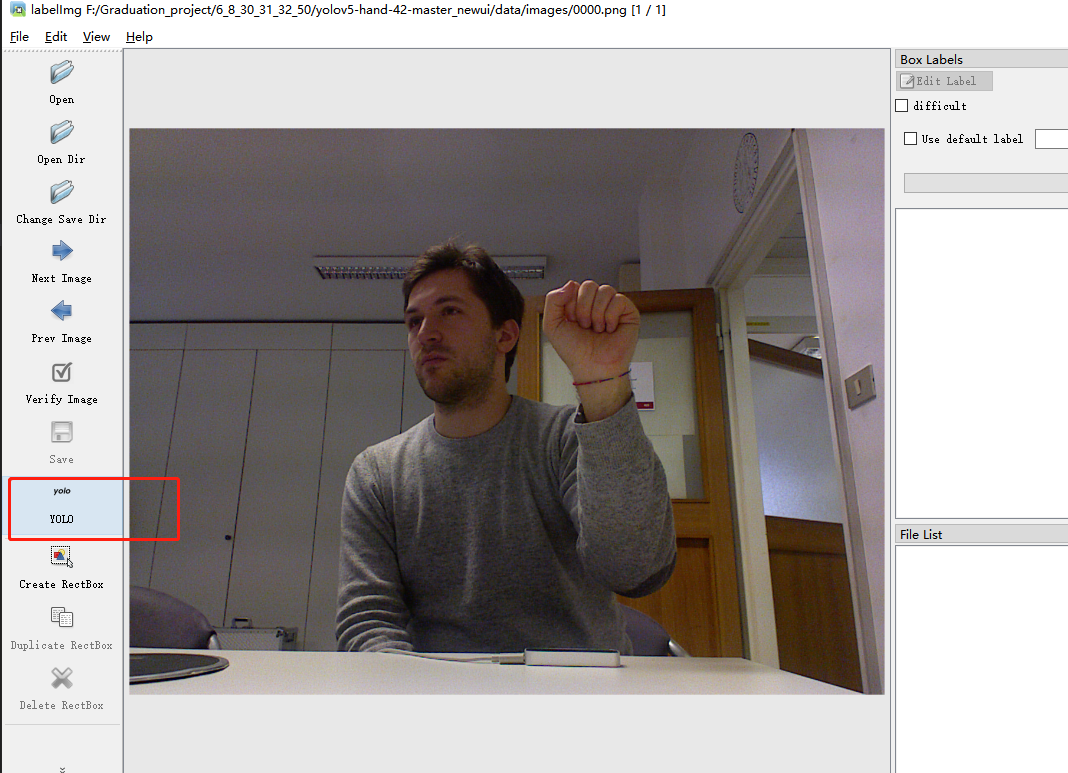
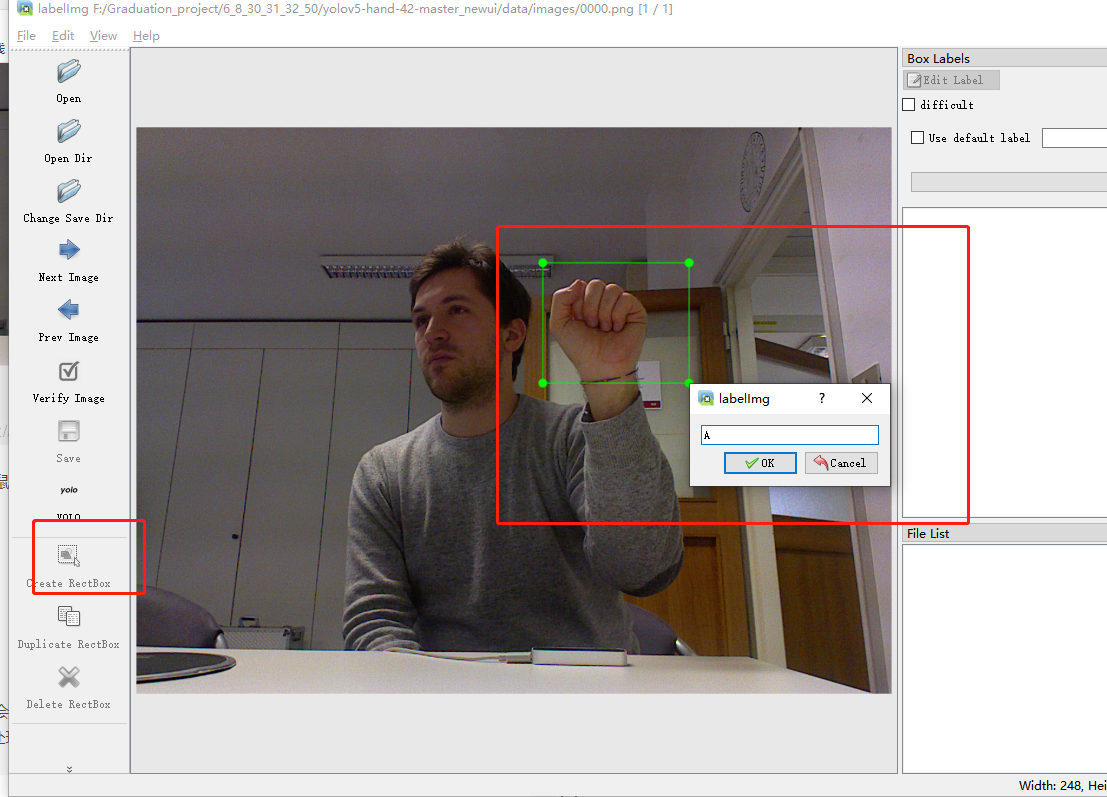
点击Create RectBo -> 拖拽鼠标框选目标 -> 给上标签 -> 点击ok
4.2 数据保存
点击save,保存txt。
打开具体的标注文件,你将会看到下面的内容,txt文件中每一行表示一个目标,以空格进行区分,分别表示目标的类别id,归一化处理之后的中心点x坐标、y坐标、目标框的w和h。

5 模型训练
预训练模型和数据集都准备好了,就可以开始训练自己的yolov5目标检测模型了,训练目标检测模型需要修改两个yaml文件中的参数。一个是data目录下的相应的yaml文件,一个是model目录文件下的相应的yaml文件。
5.1 修改数据配置文件
修改data目录下的相应的yaml文件。找到目录下的voc.yaml文件,将该文件复制一份,将复制的文件重命名,最好和项目相关,这样方便后面操作。我这里修改为fire.yaml。

打开这个文件夹修改其中的参数,需要检测的类别数,这里识别手势有10种,所以这里填写10;最后填写需要识别的类别的名字(必须是英文,否则会乱码识别不出来)。到这里和data目录下的yaml文件就修改好了。

5.2 修改模型配置文件
由于该项目使用的是yolov5s.pt这个预训练权重,所以要使用models目录下的yolov5s.yaml文件中的相应参数(因为不同的预训练权重对应着不同的网络层数,所以用错预训练权重会报错)。同上修改data目录下的yaml文件一样,我们最好将yolov5s.yaml文件复制一份,然后将其重命名
打开yolov5s.yaml文件,主要是进去后修改nc这个参数来进行类别的修改,修改如图中的数字就好了,这里是识别10个类别。

至此,相应的配置参数就修改好了。
目前支持的模型种类如下所示:

5.3 开始训练模型
如果上面的数据集和两个yaml文件的参数都修改好了的话,就可以开始yolov5的训练了。首先我们找到train.py这个py文件。
然后找到主函数的入口,这里面有模型的主要参数。修改train.py中的weights、cfg、data、epochs、batch_size、imgsz、device、workers等参数

至此,就可以运行train.py函数训练自己的模型了。
训练代码成功执行之后会在命令行中输出下列信息,接下来就是安心等待模型训练结束即可。

6 实现效果
我们实现了图片检测,视频检测和摄像头实时检测接口,用Pyqt自制了简单UI
#部分代码
from PyQt5 import QtCore, QtGui, QtWidgetsclass Ui_Win_mask(object):def setupUi(self, Win_mask):Win_mask.setObjectName("Win_mask")Win_mask.resize(1107, 868)Win_mask.setStyleSheet("QString qstrStylesheet = \"background-color:rgb(43, 43, 255)\";\n"
"ui.pushButton->setStyleSheet(qstrStylesheet);")self.frame = QtWidgets.QFrame(Win_mask)self.frame.setGeometry(QtCore.QRect(10, 140, 201, 701))self.frame.setFrameShape(QtWidgets.QFrame.StyledPanel)self.frame.setFrameShadow(QtWidgets.QFrame.Raised)self.frame.setObjectName("frame")self.pushButton = QtWidgets.QPushButton(self.frame)self.pushButton.setGeometry(QtCore.QRect(10, 40, 161, 51))font = QtGui.QFont()font.setBold(True)font.setUnderline(True)font.setWeight(75)self.pushButton.setFont(font)self.pushButton.setStyleSheet("QPushButton{background-color:rgb(151, 191, 255);}")self.pushButton.setObjectName("pushButton")self.pushButton_2 = QtWidgets.QPushButton(self.frame)self.pushButton_2.setGeometry(QtCore.QRect(10, 280, 161, 51))font = QtGui.QFont()font.setBold(True)font.setUnderline(True)font.setWeight(75)self.pushButton_2.setFont(font)self.pushButton_2.setStyleSheet("QPushButton{background-color:rgb(151, 191, 255);}")self.pushButton_2.setObjectName("pushButton_2")self.pushButton_3 = QtWidgets.QPushButton(self.frame)self.pushButton_3.setGeometry(QtCore.QRect(10, 500, 161, 51))QtCore.QMetaObject.connectSlotsByName(Win_mask)
6.1图片效果

6.2 视频效果,摄像头实时效果
7 最后
相关文章:
计算机毕设 深度学习手势识别 - yolo python opencv cnn 机器视觉
文章目录 0 前言1 课题背景2 卷积神经网络2.1卷积层2.2 池化层2.3 激活函数2.4 全连接层2.5 使用tensorflow中keras模块实现卷积神经网络 3 YOLOV53.1 网络架构图3.2 输入端3.3 基准网络3.4 Neck网络3.5 Head输出层 4 数据集准备4.1 数据标注简介4.2 数据保存 5 模型训练5.1 修…...

vue3 axios接口封装
在Vue 3中,可以通过封装axios来实现接口的统一管理和调用。封装后的接口调用更加简洁,代码可维护性也更好。以下是一个简单的Vue 3中axios接口封装的示例: 1.首先,安装axios和qs(如果需要处理复杂数据)&am…...

誉天程序员-2301-3-day08
4. 书籍管理实现CURD 这个结构比较复杂,是有一套复杂的机制,注意它们之间的关系和控制实现。 新增和修改怎么复用对话框 对话框中的数据,表格中展现的数据,临时记录正在操作的数据统一联动起来 单条删除怎么传递数据&am…...

Python爬虫(1)一次性搞定Selenium(新版)8种find_element元素定位方式
selenium中有8种不错的元素定位方式,每个方式和应用场景都不一样,需要根据自己的使用情况来进行修改 8种find_element元素定位方式 1.id定位2.CSS定位3.XPATH定位4.name定位5.class_name定位6.Link_Text定位7.PARTIAL_LINK_TEXT定位8.TAG_NAME定位总结 …...

前端(十一)——Vue vs. React:两大前端框架的深度对比与分析
😊博主:小猫娃来啦 😊文章核心:Vue vs. React:两大前端框架的深度对比与分析 文章目录 前言概述原理与设计思想算法生态系统与社区支持API与语法性能与优化开发体验与工程化对比总结结语 前言 在当今快速发展的前端领…...
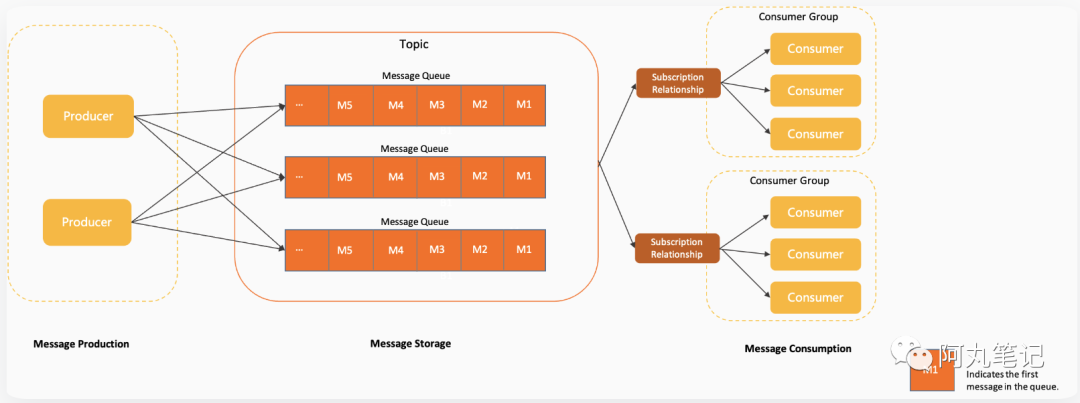
三分钟白话RocketMQ系列—— 核心概念
目录 关键字摘要 Q1:RocketMQ是什么? Q2: 作为消息中间件,RocketMQ和kafka有什么区别? Q3: RocketMQ的基本架构是怎样的? Q4:RocketMQ有哪些核心概念? 总结 RocketMQ是一个开源的分布式消…...

递归竖栏菜单简单思路
自己的项目要写一个竖栏菜单,所以记录一下思路吧,先粗糙的实现一把,有机会再把细节修饰一下 功能上就是无论这个菜单有多少层级,都能显示出来,另外,需要带图标,基于element-plus写成࿰…...

组件化、跨平台…未来前端框架将如何演进?
前端框架在过去几年间取得了显著的进步和演进。前端框架也将继续不断地演化,以满足日益复杂的业务需求和用户体验要求。从全球web发展角度看,框架竞争已经从第一阶段的前端框架之争(比如Vue、React、Angular等),过渡到…...
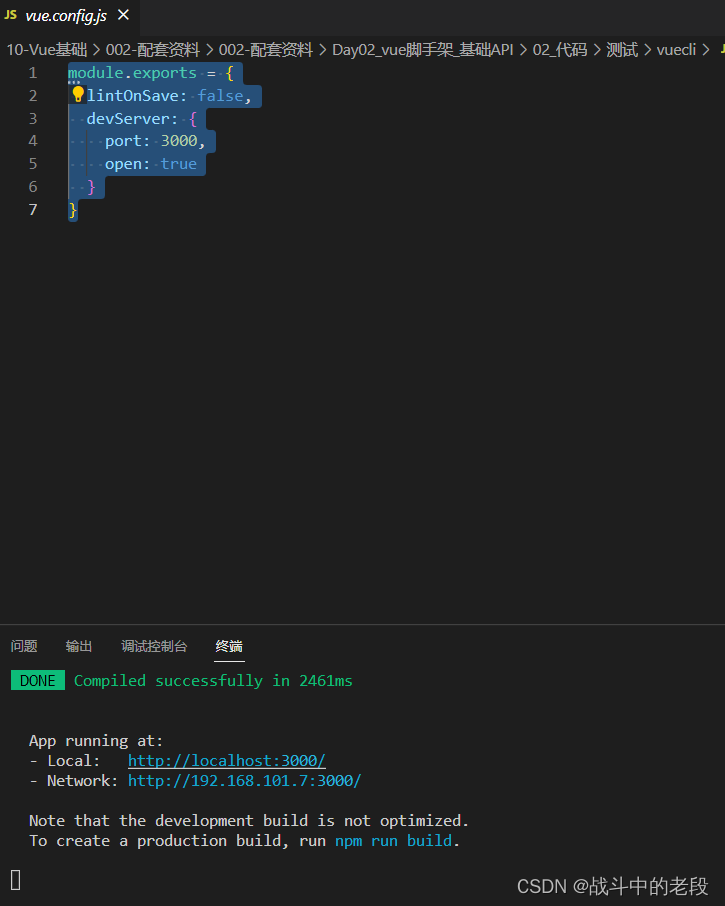
vue 修改端口号
在根目录创建一个vue.config.js文件夹 module.exports {lintOnSave: false,devServer: {port: 3000,open: true} }运行后...

hive的metastore问题汇总
1. metastore内存飙升 1 问题 metastore内存飙升降不下来; spark集群提交的任务无法运行, 只申请到了dirver的资源; 2 原因 当Spark任务无法获取足够资源时,因为任务无法继续进行,不能将元数据从Metastore返回给任务 后,这些元数据暂存在…...
【phaser微信抖音小游戏开发003】游戏状态state场景规划
经过目录优化后的执行结果: 经历过上001,002的规划,我们虽然实现了helloworld .但略显有些繁杂,我们将做以下的修改。修改后的目录和文件结构如图。 game.js//小游戏的重要文件,从这个开始。 main.js 游戏的初始化&a…...
字符串性能优化
String 对象作为 Java 语言中重要的数据类型,是内存中占据空间最大的一个对象。高效地 使用字符串,可以提升系统的整体性能。 来一到题来引出这个话题 通过三种不同的方式创建了三个对象,再依次两两匹配,每组被匹配的两个对象是否…...
从零开始理解Linux中断架构(23)中断运行临界区和占先调度
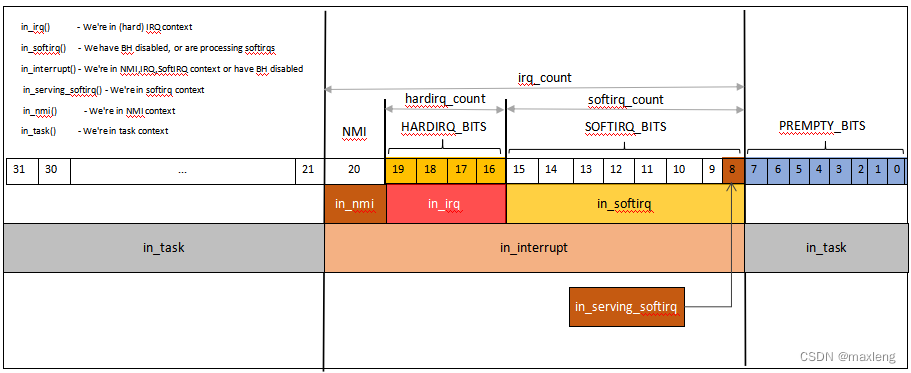
Linux在内核中定义了6种运行临界区。 in_interrupt in_interrupt在驱动中使用频率最高的函数了,in_interrupt()就是指示Core是否正在中断处理中,包含了硬中断,软中断运行临界区。如果在中断处理中,则不能调用__do_softirq执行软中断处理。硬中断中不可调度不可中断,所有…...
Gymnasium--CartPole的测试基于DQN)
(3)Gymnasium--CartPole的测试基于DQN
1、使用Pytorch基于DQN的实现 1.1 主要参考 (1)推荐pytorch官方的教程 Reinforcement Learning (DQN) Tutorial — PyTorch Tutorials 2.0.1cu117 documentation (2) Pytorch 深度强化学习 – CartPole问题|极客笔记 2.2 pytorch官方的教程原理 待续,这两天时…...
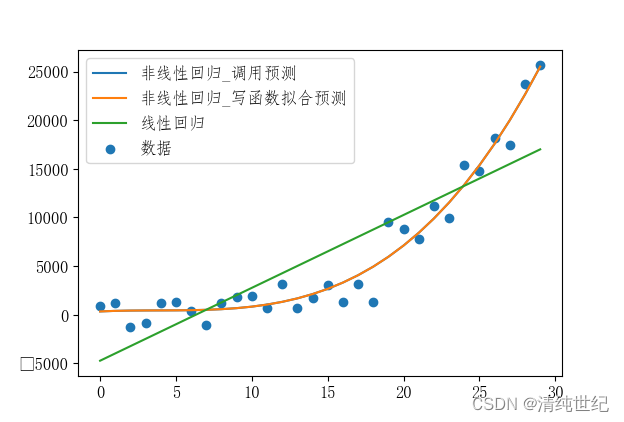
利用sklearn 实现线性回归、非线性回归
代码: import pandas as pd import numpy as np import matplotlib import random from matplotlib import pyplot as plt from sklearn.preprocessing import PolynomialFeatures from sklearn.linear_model import LinearRegression# 创建虚拟数据 x np.array(r…...
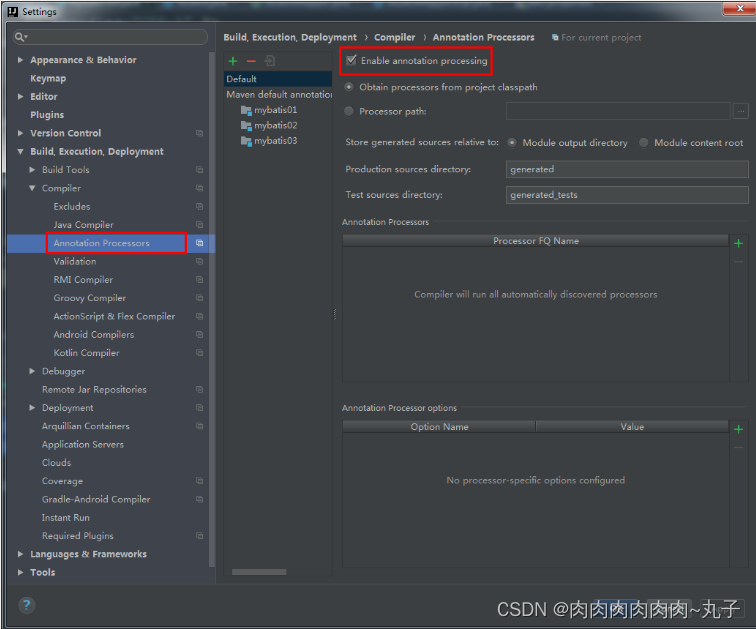
Java课题笔记~ MyBatis入门
一、ORM框架 当今企业级应用的开发环境中,对象和关系数据是业务实体的两种表现形式。业务实体在内存中表现为对象,在数据库中变现为关系数据。当采用面向对象的方法编写程序时,一旦需要访问数据库,就需要回到关系数据的访问方式&…...
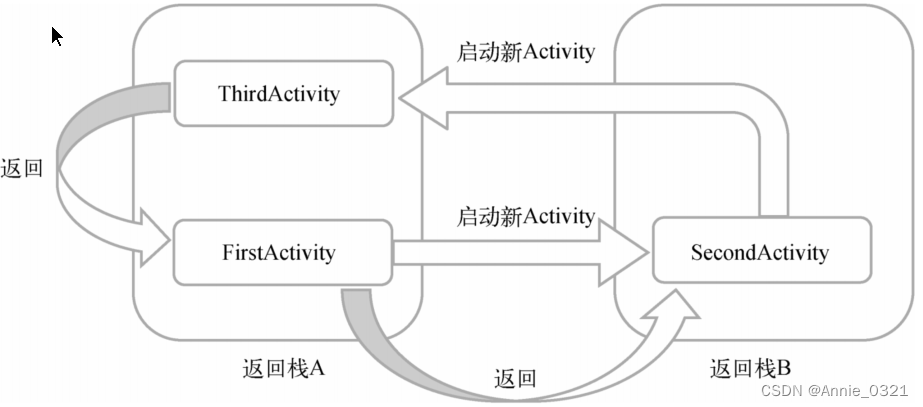
Activity的自启动模式
以下内容摘自郭霖《第一行代码》第三版 文章目录 Activity的自启动模式1.standard(默认)2.singleTop3.singleTask4.singleInstance Activity的自启动模式 启动模式一共有4种,分别是standard、singleTop、singleTask和singleInstance&#x…...

53数组的扩展
数组的扩展 扩展运算符Array.from()Array.of()实例方法:copyWithin()实例方法:find(),findIndex(),findLast(),findLastIndex()实例方法:fill()[实例方法:entries(),keys() 和 valu…...

Rust调试【三】
Local Debug: vscode CodeLLDB extension memory leak analysis: Rust and Valgrind FFI Memory wrapping: Foreign Function Interface FFI panic handling: Panic handling...

uniApp 对接安卓平板刷卡器, 读取串口数据
背景: 设备: 鸿合 电子班牌 刷卡对接 WS-B22CS, 安卓11; 需求: 将刷卡器的数据传递到自己的App中, 作为上下岗信息使用, 以完成业务; 对接方式: 1. 厂家技术首先推荐使用 接收自定义广播的方式来获取, 参考代码如下 对应到uniApp 中的实现如下 <template><view c…...

别再傻傻分不清了!一张图看懂CRT、PEM、PFX、P7B证书格式的区别与应用场景
数字证书格式全解析:CRT、PEM、PFX、P7B的核心差异与实战选择 当你第一次在服务器上配置SSL证书时,面对CRT、PEM、PFX、P7B这些后缀名,是不是感觉像在解密码?上周我帮一个创业团队迁移服务器,他们的CTO拿着五个不同格式…...

如何彻底清理Mac应用残留文件:Pearcleaner完整指南
如何彻底清理Mac应用残留文件:Pearcleaner完整指南 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾经遇到过这样的情况:删除…...

基于Shell与Python的本地化GPT服务部署与架构实践
1. 项目概述:一个基于Shell与NLP的轻量级GPT服务接口最近在折腾一些自动化脚本和智能对话的集成,发现了一个挺有意思的需求:能不能在命令行里,或者通过一个简单的HTTP请求,就能调用类似GPT这样的语言模型,来…...

Git GitLab介绍
Git 是工具,GitLab 是使用这个工具的“工厂”或“协作平台”。它们是完全不同层面的东西,但紧密相关。下面是详细的对比:1. Git - 版本控制系统(核心工具)本质:一个开源的分布式版本控制软件,由…...

FanControl终极指南:让你的Windows风扇控制变得智能又安静
FanControl终极指南:让你的Windows风扇控制变得智能又安静 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trendin…...

港大开源 【OpenHarness】 深度剖析:1.1 万行代码解构 Agent 架构,把黑盒变白盒
港大开源 【OpenHarness】 深度剖析:1.1 万行代码解构 Agent 架构,把黑盒变白盒 写在前面:香港大学数据科学研究所(HKUDS)开源的 OpenHarness 项目,上线两天斩获 1.9K Star,10 天突破 9.5K Star…...

OpenRGB:一站式开源RGB灯光控制神器,彻底摆脱厂商软件束缚!
OpenRGB:一站式开源RGB灯光控制神器,彻底摆脱厂商软件束缚! 【免费下载链接】OpenRGB Open source RGB lighting control that doesnt depend on manufacturer software. Supports Windows, Linux, MacOS. Mirror of https://gitlab.com/Calc…...

Windows热键冲突终极排查指南:5分钟快速定位占用进程
Windows热键冲突终极排查指南:5分钟快速定位占用进程 【免费下载链接】hotkey-detective A small program for investigating stolen key combinations under Windows 7 and later. 项目地址: https://gitcode.com/gh_mirrors/ho/hotkey-detective 你是否曾经…...

hackGPT:基于大语言模型的智能命令行安全工具实践
1. 项目概述:当黑客工具遇上大语言模型最近在安全研究和自动化工具开发的圈子里,一个名为“hackGPT”的项目引起了我的注意。这个由NoDataFound开源的仓库,名字本身就充满了噱头——它将“黑客”(hack)与当下最热的大语…...

自动驾驶系统商业化策略:硬件与软件协同设计解析
1. 自动驾驶系统的商业策略框架解析自动驾驶系统(Autonomous Driving System, ADS)作为智能交通领域的核心技术,其商业化落地需要硬件(SSH)与软件策略的协同设计。从技术架构来看,ADS由感知层、决策层和执行…...