51单片机--红外遥控
文章目录
- 红外遥控的介绍
- 硬件电路
- NEC编码
- 外部中断
- 红外遥控实例代码
红外遥控的介绍
红外遥控是一种无线、非接触控制技术,通过使用红外线来传送控制信号。它具有抗干扰能力强、信息传输可靠、功耗低、成本低、易实现等显著优点,因此被广泛应用于各种电子设备和家用电器,也越来越多地应用于计算机和手机系统中。

硬件电路
红外遥控系统一般由发射和接收两个部分组成。发射部分包括红外发光二极管,它是一种特殊的发光二极管,能够发射调制后的红外光波。接收部分通常采用红外接收模块,用于接收来自遥控器发射的红外信号。当遥控器处于学习状态时,接收模块会接收外来红外信号,并将其转换成电信号。经过检波、整形和放大等处理后,这些电信号会被传送到中央处理单元(CPU)进行解码和执行相应的控制动作。
发射端:
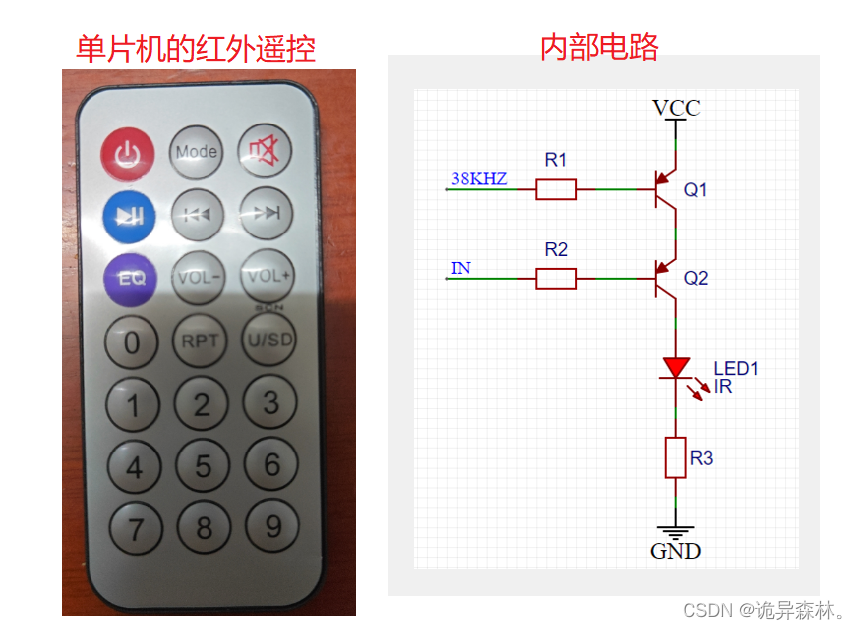
IN是输入信号端口,输入的信号会通过38kHz的频率在三极管中放大,到发光二极管中,二极管发出闪烁着的特制红外光线;
在现实生活中有很多种类型的红外线,为了让接收方只接收这一类型的红外线,就在电路中加入了频率,让这个信号能有一定频率的闪烁;
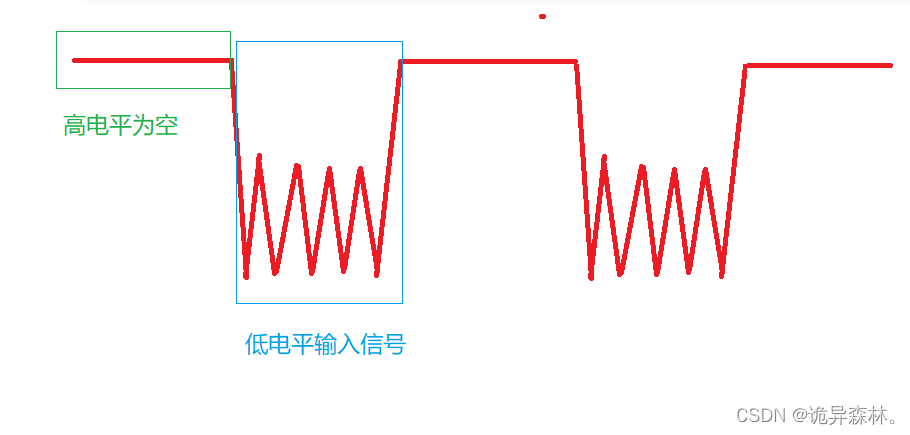
当我们没有输入时,默认为高电平,而当我们输入信号时,就会在低电平发出有频率波动的信号;
接收端:
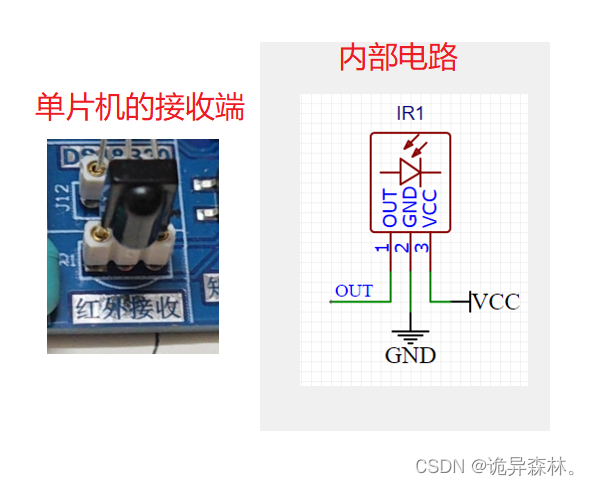
这里将接收的发光二极管内置在了电路中,电路也很容易,电源、接地、以及信号输出;
在这里我们会让OUT端口接上外部中断,当产生下降沿就进入中断;

NEC编码
NEC编码是一种红外遥控协议,常用于遥控器与设备之间的通信。它是一种常用的编码格式;将遥控发送过来的信号进行一定形式的编码,转换为对应的信息;
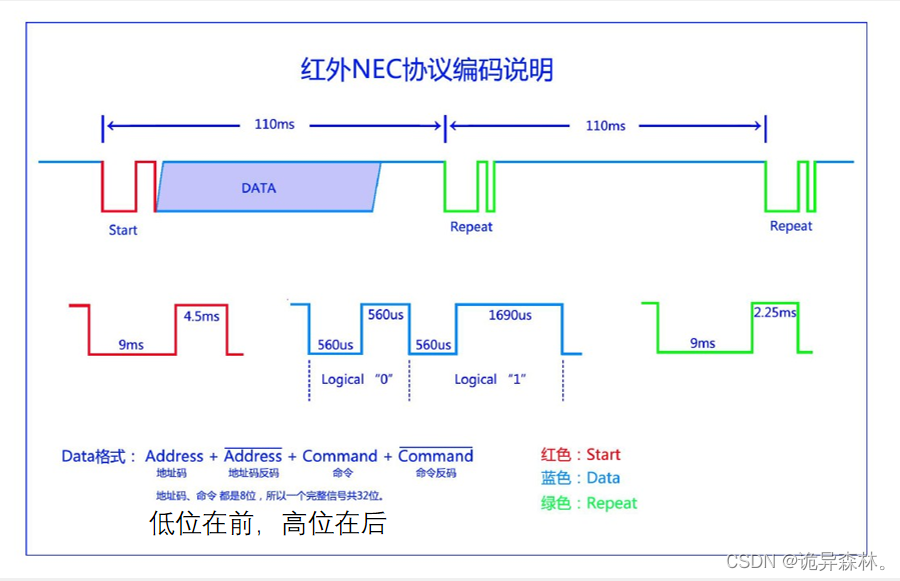
NEC编码的数据格式通常由以下几部分组成:
-
引导码(Leader Code):持续低电平(通常为9ms)和持续高电平(通常为4.5ms),用于标识开始传输数据。
-
系统码(Customer Code):8位二进制代码,用于识别具体的设备或品牌。
-
数据码(Data Code):8位二进制代码,表示具体的指令或按键信息。在传输数据时一般持续低电平(560us)和持续高电平(560us)表示传输‘0’,持续低电平(560us)和持续高电平(1690us)表示传输‘1’;
-
取反码(Inverted Data Code):与数据码和系统码相反的二进制代码,用于检验数据的正确性。
-
结束码(Stop Bit):持续高电平(通常为0.56ms),表示数据传输结束。在这里,我们没有引用到;
-
重复码(Repeat Code):数据传输之后,若持续低电平(9ms)和持续高电平(2.25ms),那么将会重复这个命令信息;
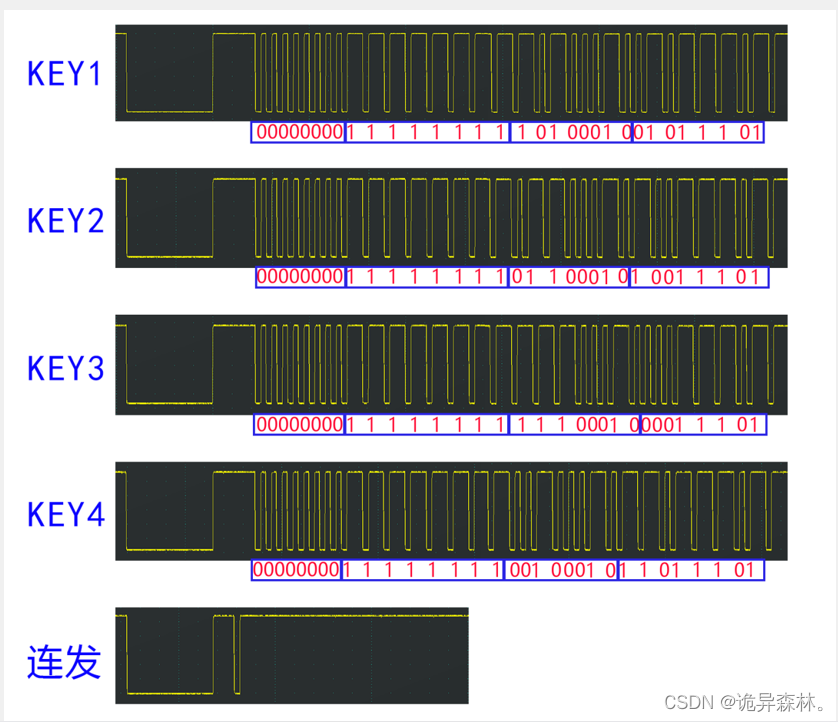
NEC编码使用38kHz的载波频率进行传输,通过在红外光线的调制和解调实现遥控功能。在发射时,数据按照引导码、系统码、数据码和取反码的顺序发送;在接收端,通过解码器将红外信号还原为对应的系统码和数据码,从而实现遥控器与设备的交互。
外部中断
51单片机的外部中断是指通过外部信号触发单片机进行中断处理的一种机制。单片机通过外部引脚接收到特定的信号后,会立即暂停当前的任务,转而执行与该中断相关的程序。
在51单片机中,有两个外部中断源,分别为外部中断0(INT0)和外部中断1(INT1)。这两个中断源分别对应单片机的引脚P3.2和P3.3。
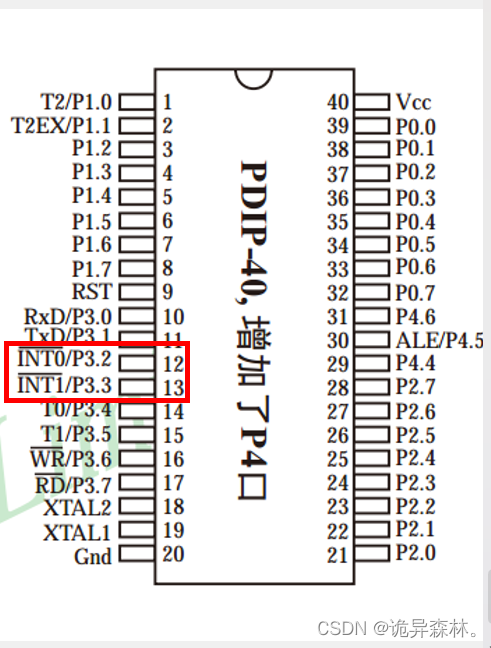
外部中断可以通过两种触发方式来进行中断处理:电平触发和边沿触发。电平触发是指当外部信号维持在某个电平上时触发中断,可以是低电平触发或高电平触发;边沿触发是指当外部信号的跳变沿(上升沿或下降沿)出现时触发中断。
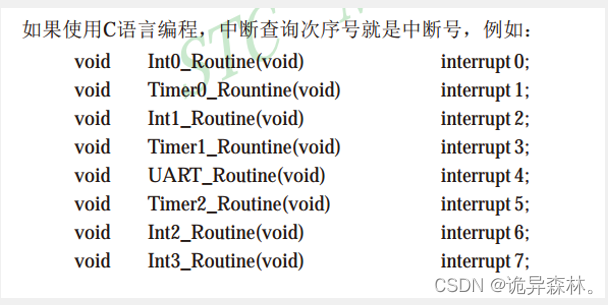
中断号:
此次操作相关寄存器以及原理:
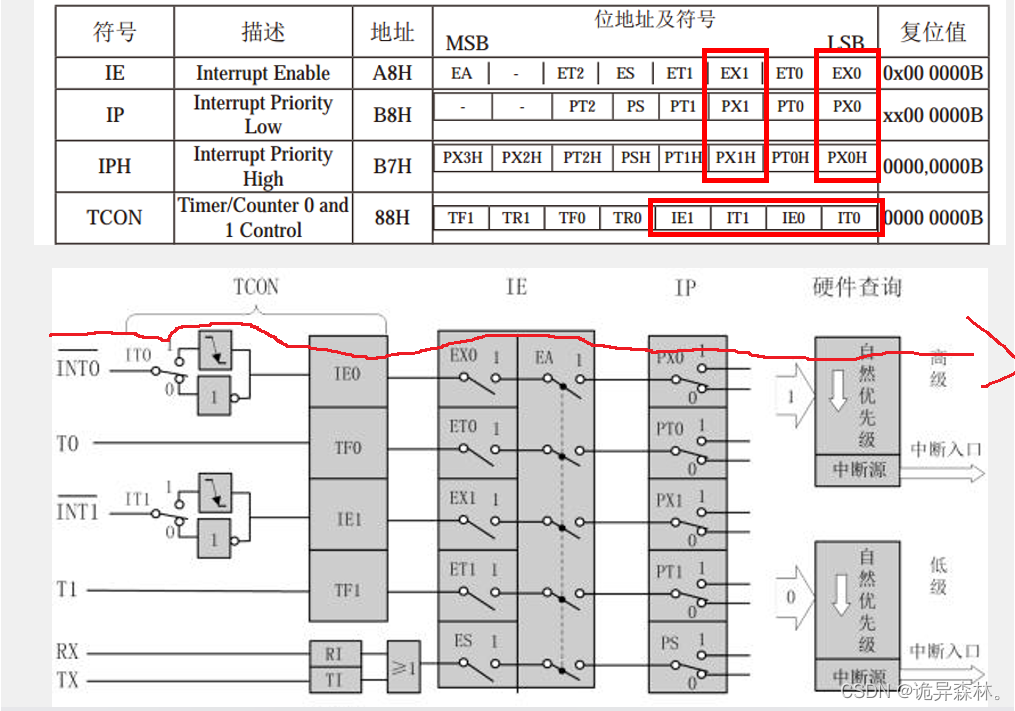
使用外部中断前,需要进行相应的初始化操作。
初始化:
void Interrupt0_Init()
{IT0=1;//外部中断0选择边沿触发IE0=1;//外部中断0请求标志EX0=1;//外部中断0请求允许位EA=1;//总中断允许PX0=1;//中断优先级控制
}
红外遥控实例代码
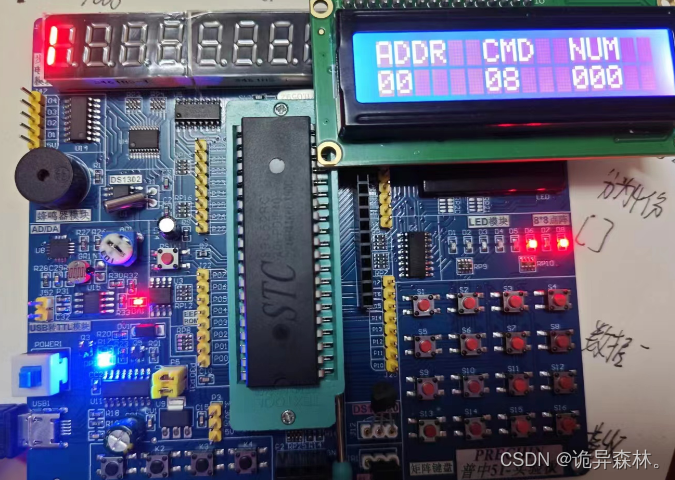
接下来,我们要实现的是在屏幕上显示地址,命令码,数字增减,通过遥控的控制,让命令码随之改变,数字达到增减;
我们将通过定时器和外部中断0来进行操控,写出NEC编码;
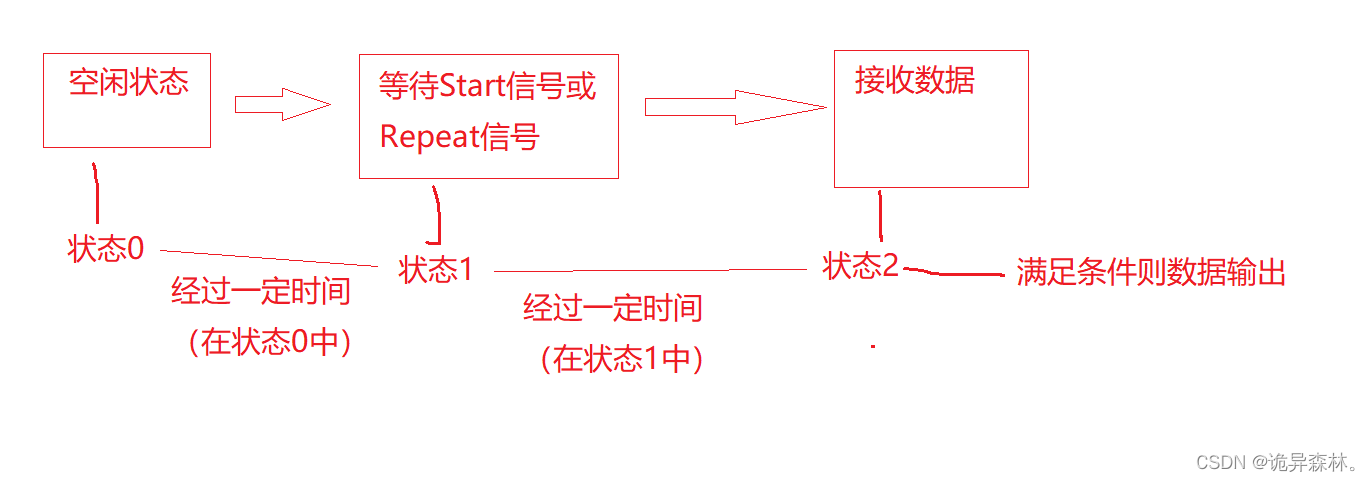
利用不同的状态表示到达不同的编码阶段;
Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__void Timer0Init();
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter();
void Timer0_Run(unsigned char Flag);
#endif
Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @reval 无*/
void Timer0Init(void) //1毫秒@11.0592MHz
{TMOD &= 0xF0; //设置定时器模式TMOD |=0x01;TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0不计时}//定时器0设置计数器值,范围0-65535
void Timer0_SetCounter(unsigned int Value)
{TH0=Value/256;TL0=Value%256;
}//定时器0获取计数器值
unsigned int Timer0_GetCounter()
{return (TH0<<8)|TL0;
}//定时器0启动停止控制
void Timer0_Run(unsigned char Flag)
{TR0=Flag;
}将定时器初始化为0,让定时器实现计时器的功能;
Interrupt.h
#ifndef __INTERRUPT_H__
#define __INTERRUPT_H__void Interrupt0_Init();#endif
Interrupt.c
#include <REGX52.H>//外部中断0初始化
void Interrupt0_Init()
{IT0=1;IE0=1;EX0=1;EA=1;PX0=1;
}按键对应命令码:

IR.h
#ifndef __IR_H__
#define __IR_H__#define IR_POWER 0x45
#define IR_MODE 0x46
#define IR_MUTE 0x47
#define IR_START_STOP 0x44
#define IR_PREVIOUS 0x40
#define IR_NEXT 0x43
#define IR_EQ 0x07
#define IR_VOL_MINUS 0x15
#define IR_VOL_ADD 0x09
#define IR_0 0x16
#define IR_RPT 0x19
#define IR_USD 0x0D
#define IR_1 0x0C
#define IR_2 0x18
#define IR_3 0x5E
#define IR_4 0x08
#define IR_5 0x1C
#define IR_6 0x5A
#define IR_7 0x42
#define IR_8 0x52
#define IR_9 0x4Avoid IR_Init();
unsigned char IR_GetDataFlag();
unsigned char IR_GetRepeatFlag();
unsigned char IR_GetAddress();
unsigned char IR_GetCommand();#endif
IR.c
#include <REGX52.H>
#include"Timer0.h"
#include"Interrupt.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];
unsigned char IR_pData;unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;//红外遥控初始化
void IR_Init()
{Timer0Init();Interrupt0_Init();
}//红外遥控获取收到数据帧标志位
unsigned char IR_GetDataFlag()
{if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0;
}//红外遥控获取收到连发标志位
unsigned char IR_GetRepeatFlag()
{if(IR_DataFlag){IR_RepeatFlag=0;return 1;}return 0;
}//红外遥控获取收到的地址数据
unsigned char IR_GetAddress()
{return IR_Address;
}//红外遥控获取收到的命令数
unsigned char IR_GetCommand()
{return IR_Command;
}//外部中断0函数
void Int0_Routine() interrupt 0
{if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //计数器清0Timer0_Run(1); //定时器启动IR_State=1; //变为状态1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取开始的时间或重复的时间Timer0_SetCounter(0); //计时器清0if(IR_Time>12442-500&&IR_Time<12442+500)//表示是开始信号,进入下一阶段{IR_State=2;}else if(IR_Time>10368-500&&IR_Time<10368+500)//是重复信号,回到最初的起点{IR_RepeatFlag=1; //连发帧标志位置1Timer0_Run(0); //定时器停止IR_State=0; //状态置0}else{IR_State=1;}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter();//获取接收数据的时间段Timer0_SetCounter(0);if(IR_Time>1032-500&&IR_Time<1032+500)//数据接到为0{IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8));IR_pData++;}else if(IR_Time>2074-500&&IR_Time<2074+500)//数据接收到为1{IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8));//除8是将32位下标分为4个元素,模8将32位下标从0~7有序循环IR_pData++;}else //接收错误{IR_pData=0;IR_State=1;}if(IR_pData>=32) //如果收到了32位{IR_pData=0; //下标清0if((IR_Data[0]==~IR_Data[1])&&(IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //存储数据IR_Command=IR_Data[2];IR_DataFlag=1; //数据帧标志位置1}Timer0_Run(0); //定时器停止IR_State=0; //状态置0}}
}
LCD1602.c
#include <REGX52.H>//引脚配置:
sbit LCD_RS=P2^6;
sbit LCD_RW=P2^5;
sbit LCD_EN=P2^7;
#define LCD_DataPort P0//函数定义:
/*** @brief LCD1602延时函数,12MHz调用可延时1ms* @param 无* @retval 无*/
void LCD_Delay()
{unsigned char i, j;i = 2;j = 239;do{while (--j);} while (--i);
}/*** @brief LCD1602写命令* @param Command 要写入的命令* @retval 无*/
void LCD_WriteCommand(unsigned char Command)
{LCD_RS=0;LCD_RW=0;LCD_DataPort=Command;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay();
}/*** @brief LCD1602写数据* @param Data 要写入的数据* @retval 无*/
void LCD_WriteData(unsigned char Data)
{LCD_RS=1;LCD_RW=0;LCD_DataPort=Data;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay();
}/*** @brief LCD1602设置光标位置* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @retval 无*/
void LCD_SetCursor(unsigned char Line,unsigned char Column)
{if(Line==1){LCD_WriteCommand(0x80|(Column-1));}else if(Line==2){LCD_WriteCommand(0x80|(Column-1+0x40));}
}/*** @brief LCD1602初始化函数* @param 无* @retval 无*/
void LCD_Init()
{LCD_WriteCommand(0x38);//八位数据接口,两行显示,5*7点阵LCD_WriteCommand(0x0c);//显示开,光标关,闪烁关LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动LCD_WriteCommand(0x01);//光标复位,清屏
}/*** @brief 在LCD1602指定位置上显示一个字符* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @param Char 要显示的字符* @retval 无*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char)
{LCD_SetCursor(Line,Column);LCD_WriteData(Char);
}/*** @brief 在LCD1602指定位置开始显示所给字符串* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串* @retval 无*/
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=0;String[i]!='\0';i++){LCD_WriteData(String[i]);}
}/*** @brief 返回值=X的Y次方*/
int LCD_Pow(int X,int Y)
{unsigned char i;int Result=1;for(i=0;i<Y;i++){Result*=X;}return Result;
}/*** @brief 在LCD1602指定位置开始显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~65535* @param Length 要显示数字的长度,范围:1~5* @retval 无*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(10,i-1)%10+'0');}
}/*** @brief 在LCD1602指定位置开始以有符号十进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-32768~32767* @param Length 要显示数字的长度,范围:1~5* @retval 无*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length)
{unsigned char i;unsigned int Number1;LCD_SetCursor(Line,Column);if(Number>=0){LCD_WriteData('+');Number1=Number;}else{LCD_WriteData('-');Number1=-Number;}for(i=Length;i>0;i--){LCD_WriteData(Number1/LCD_Pow(10,i-1)%10+'0');}
}/*** @brief 在LCD1602指定位置开始以十六进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFF* @param Length 要显示数字的长度,范围:1~4* @retval 无*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i,SingleNumber;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){SingleNumber=Number/LCD_Pow(16,i-1)%16;if(SingleNumber<10){LCD_WriteData(SingleNumber+'0');}else{LCD_WriteData(SingleNumber-10+'A');}}
}/*** @brief 在LCD1602指定位置开始以二进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(2,i-1)%2+'0');}
}LCD1602.h
#ifndef __LCD1602_H__
#define __LCD1602_H__//用户调用函数:
void LCD_Init();
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char);
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String);
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length);
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);#endifmain.c
#include <REGX52.H>#include"LCD1602.h"
#include"IR.h"unsigned char Num;
unsigned char Address;
unsigned char Command;void main()
{LCD_Init();LCD_ShowString(1,1,"ADDR CMD NUM");LCD_ShowString(2,1,"00 00 000");IR_Init(); //NEC编码初始化while(1){if(IR_GetDataFlag()||IR_GetRepeatFlag()) //数据帧或者重复帧{Address=IR_GetAddress(); //获取遥控器地址吗Command=IR_GetCommand(); //获取遥控器命令吗LCD_ShowHexNum(2,1,Address,2);LCD_ShowHexNum(2,7,Command,2);if(Command==IR_VOL_MINUS){Num--;}if(Command==IR_VOL_ADD){Num++;}LCD_ShowNum(2,12,Num,3);}}
}
通过判断标志位是否为1来表示是否有遥控信息传输
相关文章:
51单片机--红外遥控
文章目录 红外遥控的介绍硬件电路NEC编码外部中断红外遥控实例代码 红外遥控的介绍 红外遥控是一种无线、非接触控制技术,通过使用红外线来传送控制信号。它具有抗干扰能力强、信息传输可靠、功耗低、成本低、易实现等显著优点,因此被广泛应用于各种电子…...
【图像分类】CNN+Transformer结合系列.2
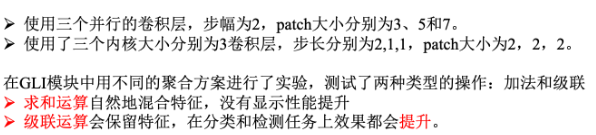
介绍几篇利用CNNTransformer实现图像分类的论文:CMT(CVPR2022),MaxViT(ECCV2022),MaxViT(ECCV2022),MPViT(CVPR2022)。主要是说明Transformer的局限性&#x…...
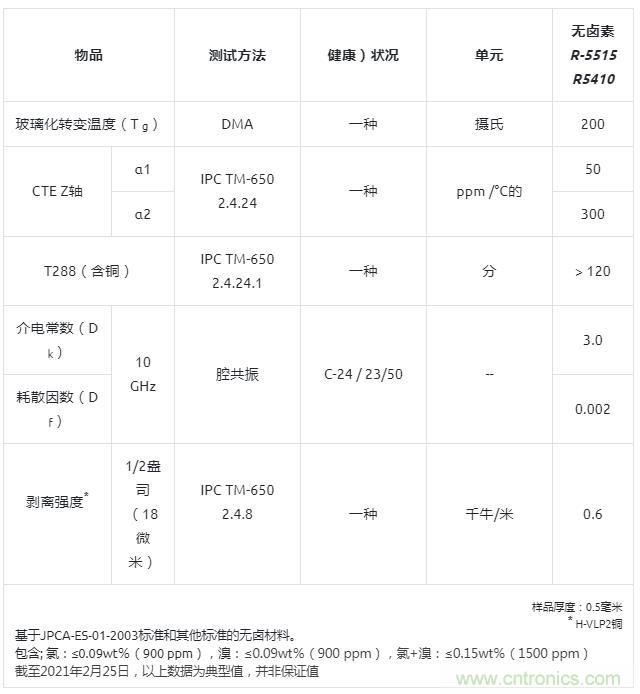
用于毫米波天线的新型无卤素超低传输损耗多层电路板R-5410
3月3日消息,松下公司宣布,其工业解决方案公司已经实现了R-5410的商业化,这是一种无卤素、超低传输损耗的多层电路板(MLCB)材料,适用于毫米波天线。将于2021年3月开始量产。 毫米波雷达是汽车、通信等行业的…...

java数据算法-汉诺塔
1、有三根相邻的柱子,标号为A,B,C。 2、A柱子上从下到上按金字塔状叠放着n个不同大小的圆盘。 3、现在把所有盘子一个一个移动到柱子C上,并且每次移动同一根柱子上都不能出现大盘子在小盘子上方。 题解步骤 1、当n1时; 将1号从A移动到C即…...

[QT编程系列-35]:数据存储 - JSON格式配置数据的存储与通知
目录 1. QJsonObject 2 QJsonDocument 3 JSON本文格式 4. JSON示例 5. JASON配置文件示例 1. QJsonObject QJsonObject 是Qt的类之一,用于表示 JSON 对象。 JSON(JavaScript Object Notation)是一种轻量级的数据交换格式࿰…...

【Spring】Spring 中事务的实现
目录 1.编程式事务(手动编写代码)2.声明式事务(利用注解)2.1 Transactional作用范围2.2 Transactional参数说明2.3 Transactional工作原理 3.Spring 中设置事务隔离级别3.1 事务四大特性ACID3.2 事务的隔离级别3.2 Spring中设置事…...
Linux 学习记录60(ARM篇)
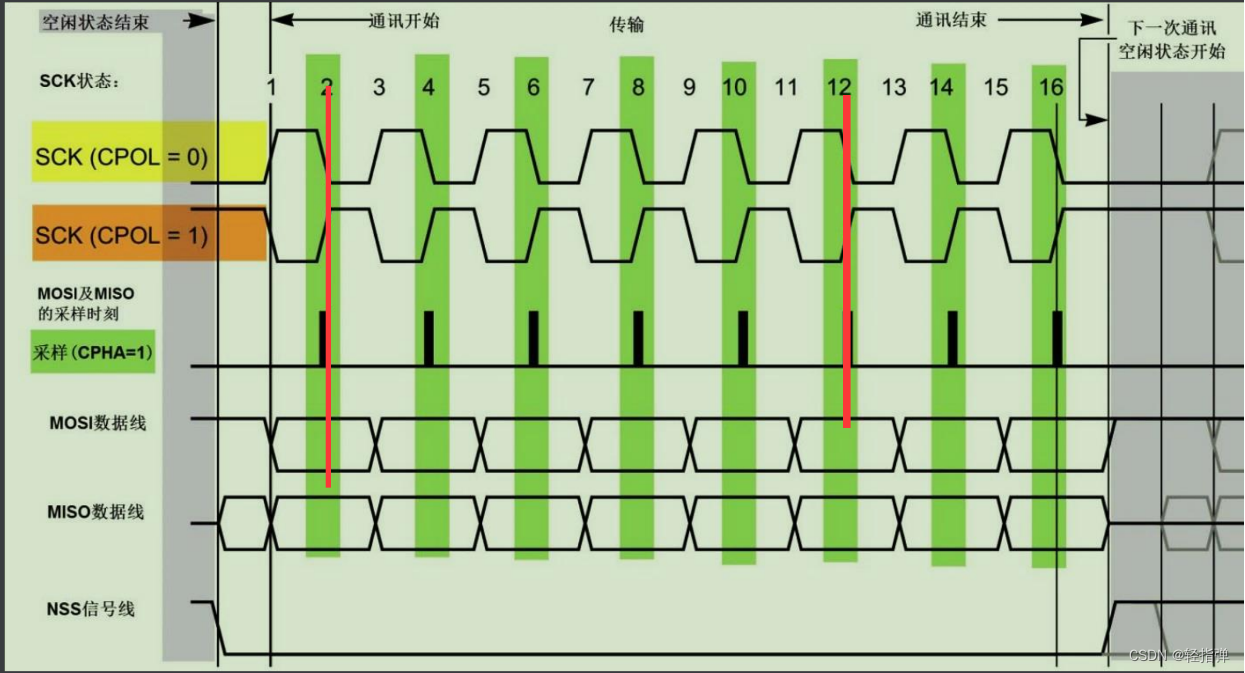
Linux 学习记录60(ARM篇) 本文目录 Linux 学习记录60(ARM篇)一、SPI总线1. 概念2. 硬件连接 二、SPI总线协议三、SPI总线通信模式四、对比IIC总线和SPI总线1. 相同点2. 不同点 思维导图 一、SPI总线 1. 概念 1、SPI总结是Motorola首先提出的全双工三线/四线同步串行总线 2、采…...
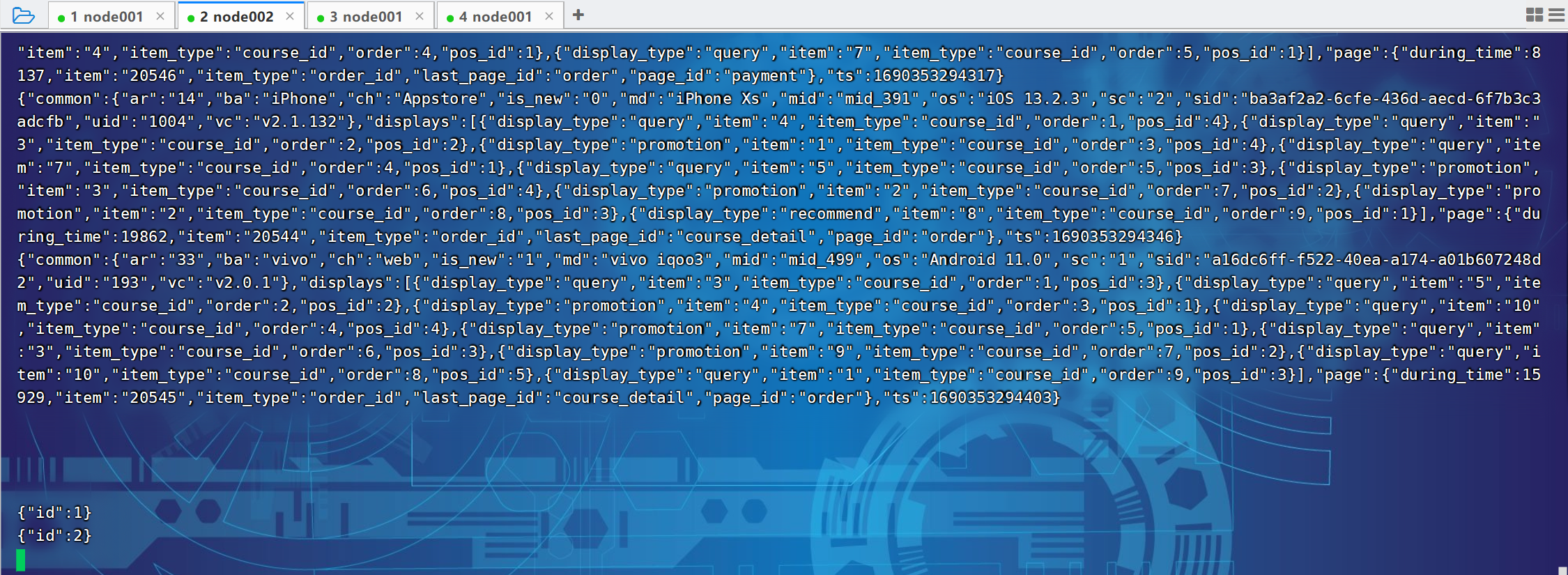
尚硅谷大数据项目《在线教育之采集系统》笔记002
视频地址:尚硅谷大数据项目《在线教育之采集系统》_哔哩哔哩_bilibili 目录 P032 P033 P033 P034 P035 P036 P032 P033 # 1、定义组件,为各组件命名 a1.sources r1 a1.channels c1 a1.sinks - k1# 2、配置sources,描述source a1.sour…...

校园跑腿小程序功能分享
提起校园跑腿小程序大家都不陌生,尤其是对上大学的伙伴们来说,更是熟悉得不能再熟悉了,和我们的生活息息相关,密不可分。 对于现在的年轻人来说,网购是非常简单和方便的一种购物方式,随之快递也会越来越多。在我们国家…...
PHP8的变量-PHP8知识详解
昨天我们讲解了PHP8的常量,今天讲解PHP8的变量。常量有定义常量和预定义常量,变量呢?那就没有定义变量了,那叫给变量赋值,但是还是有预定义变量的。下面就给大家讲解什么是变量、变量赋值及使用及预定义变量。 一、什么…...
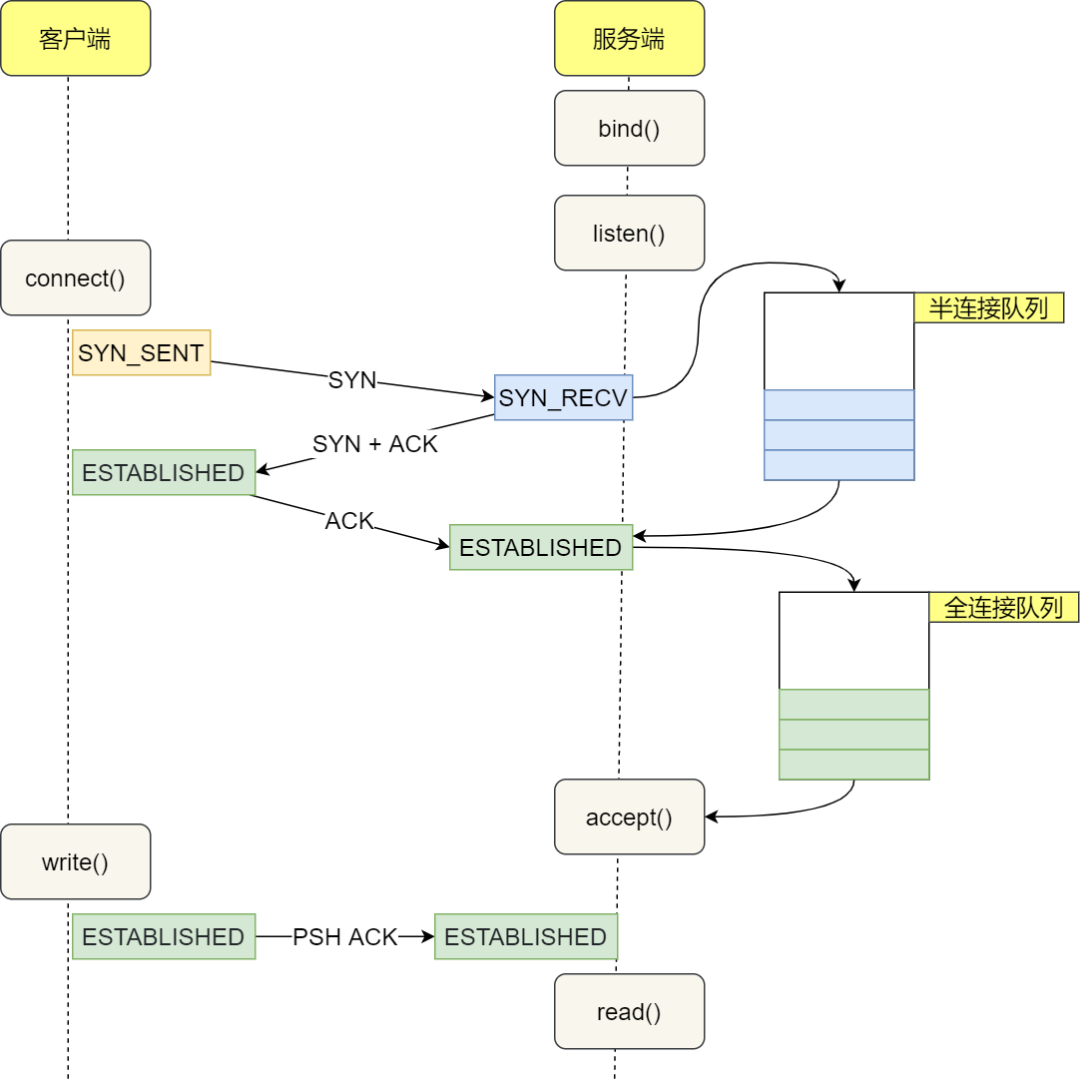
图解TCP 三次握手和四次挥手的高频面试题(2023最新版)
大家好,最近重新整理了一版 TCP 三次握手和四次挥手的面试题(2023最新版)。 ----- 任 TCP 虐我千百遍,我仍待 TCP 如初恋。 巨巨巨巨长的提纲,发车!发车! img TCP 基本认识 TCP 头格式有哪些…...
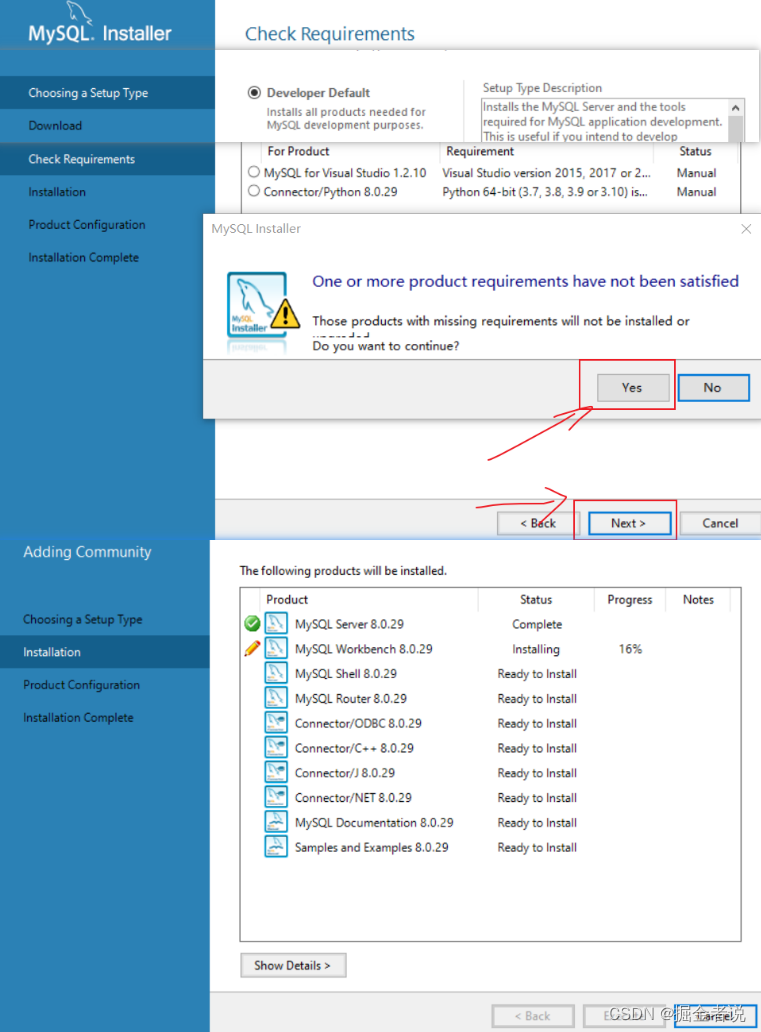
【mysql】Win10安装配置MySQL8.0简要
下载 MySQL官网下载安装包 安装...

SQL SERVER使用发布订阅同步数据库遇到的坑
可能遇到的各种坑 1.在执行 xp_cmdshell 的过程中出错。调用 ‘CreateProcess’ 失败,错误代码: ‘5’ 网上有各种解决办法,包括改本地安全策略,将sql server服务的网络权限改为本机系统,改cmd用户的读写权限,退出360…...
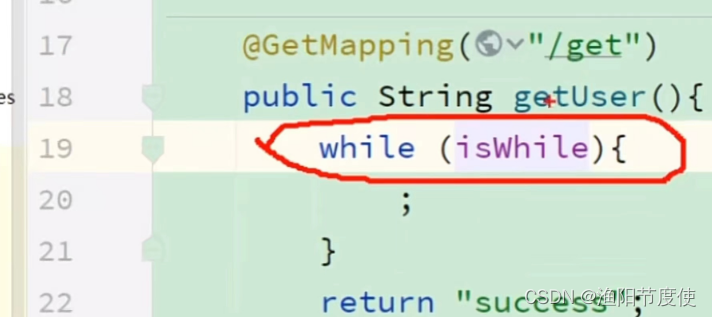
3个命令定位CPU飙高
top 指令找出消耗CPU最厉害的那个进程的pid top -H -p 进程pid 找出耗用CPU资源最多的线程pid printf ‘0x%x\n’ 线程pid 将线程pid转换为16进制 结合jstack 找出哪个代码有问题 jstack 进程pid | grep 16进制的线程pid -A 多少行日志 jstack 进程pid | grep 16进制的线程…...
Java版知识付费 Spring Cloud+Spring Boot+Mybatis+uniapp+前后端分离实现知识付费平台免费搭建
提供职业教育、企业培训、知识付费系统搭建服务。系统功能包含:录播课、直播课、题库、营销、公司组织架构、员工入职培训等。 提供私有化部署,免费售后,专业技术指导,支持PC、APP、H5、小程序多终端同步,支持二次开发…...
使用多数据源dynamic-datasource-spring-boot-starter遇到的问题记录
记录使用多数据源dynamic-datasource-spring-boot-starter遇到的问题: 1、工程启动失败 缺少clickhouse连接驱动,引入对应的maven依赖 <!--ck连接驱动--><dependency><groupId>ru.yandex.clickhouse</groupId><artifactId>…...

构建语言模型:BERT 分步实施指南
学习目标 了解 BERT 的架构和组件。了解 BERT 输入所需的预处理步骤以及如何处理不同的输入序列长度。获得使用 TensorFlow 或 PyTorch 等流行机器学习框架实施 BERT 的实践知识。了解如何针对特定下游任务(例如文本分类或命名实体识别)微调 BERT。为什么我们需要 BERT? 正…...
⛳ Java多线程 一,线程基础
线程基础 ⛳ Java多线程 一,线程基础🐾 一,线程基础💭 1.1,什么是程序,进程,线程🏭 1.2,什么是并行和并发👣 1.3,线程使用的场景🎨 1.…...
【iOS】多线程 锁问题总结
文章目录 前言1. 你理解的多线程优点缺点 2. atomic 和 nonatomic 的区别及其作用3. GCD的队列类型 - 三种队列类型4. GCD的死锁问题5. 多线程之间的区别和联系6. 进程和线程?进程间的通信方式线程间的通信方式 6. iOS的线程安全手段如何保证 前言 iOS 锁和多线程的…...
Pytorch深度学习-----神经网络之池化层用法详解及其最大池化的使用
系列文章目录 PyTorch深度学习——Anaconda和PyTorch安装 Pytorch深度学习-----数据模块Dataset类 Pytorch深度学习------TensorBoard的使用 Pytorch深度学习------Torchvision中Transforms的使用(ToTensor,Normalize,Resize ,Co…...

LAMMPS效率翻倍秘籍:从单机到并行,你的MPICH配置真的对了吗?
LAMMPS效率翻倍秘籍:从单机到并行,你的MPICH配置真的对了吗? 在分子动力学模拟领域,LAMMPS因其开源特性和强大的计算能力成为研究者的首选工具。然而,许多用户在使用过程中常遇到一个令人沮丧的现象——明明配置了多核…...

Arm Neoverse N3核心RAS架构与错误处理机制解析
1. Arm Neoverse N3核心的RAS架构解析 在服务器级处理器设计中,可靠性(Reliability)、可用性(Availability)和可维护性(Serviceability)构成了RAS技术的三大支柱。Arm Neoverse N3作为面向基础设施的核心设计,其RAS机制通过硬件级错误检测、记录和恢复功…...

通过curl命令直接调用Taotoken大模型API的排错指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令直接调用Taotoken大模型API的排错指南 对于需要在无SDK环境下进行快速测试、调试或集成的开发者而言,直接…...

进化算法驱动机械爪设计优化:从原理到EvoClaw项目实践
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫“EvoClaw”。光看这个名字,可能有点摸不着头脑,但点进去一看,发现这是一个关于“进化算法驱动的机械爪设计优化”的开源项目。简单来说,就是利用计算机…...

深部空间专属孪生,打造密闭硐室独有不可替代透明体系技术白皮书
深部空间专属孪生,打造密闭硐室独有不可替代透明体系技术白皮书副标题:井下专用暗光算法实现三维实时重建,搭配地下专属无感定位、多盲区跨镜穿透追踪、身体指纹特征识别,场景适配独一无二,行业无同类对标方案前言矿山…...

构建轻量级LLM工具集:模块化设计、多模型集成与本地化部署实践
1. 项目概述:一个面向日常的轻量级LLM工具集最近在GitHub上闲逛,发现了一个挺有意思的项目,叫“Daily-LLM”。光看名字,你可能会觉得这又是一个庞大的、需要海量算力才能跑起来的“大模型”项目。但点进去仔细研究后,我…...

3步掌握yfinance:从金融数据获取到智能分析的完整指南
3步掌握yfinance:从金融数据获取到智能分析的完整指南 【免费下载链接】yfinance Download market data from Yahoo! Finances API 项目地址: https://gitcode.com/GitHub_Trending/yf/yfinance yfinance是一个强大的Python库,能够轻松从Yahoo! F…...

基于RAG的电影智能体构建:从向量检索到Agentic设计
1. 项目概述:一个能聊电影的智能体最近在GitHub上看到一个挺有意思的项目,叫tomasonjo/llm-movieagent。光看名字,你大概能猜到,这是一个和电影、和大型语言模型(LLM)相关的智能体。简单来说,它…...
)
设计师速存!Midjourney未公开的风格隐藏开关:--style raw、--s 750、--no texture三者协同作用的神经渲染原理(GPU显存占用下降41%实测)
更多请点击: https://intelliparadigm.com 第一章:设计师速存!Midjourney未公开的风格隐藏开关:--style raw、--s 750、--no texture三者协同作用的神经渲染原理(GPU显存占用下降41%实测) Midjourney v6.1…...

Biomni项目解析:大语言模型与生物医学知识图谱融合实践
1. 项目概述:当大语言模型遇见生物医学知识图谱最近在探索如何让大语言模型(LLM)在专业领域,特别是生物医学这种信息密集、关系复杂的领域,变得更“靠谱”一点。相信很多同行都遇到过类似的问题:直接问Chat…...