驱动开发 day8 (设备树驱动,按键中断实现led亮灭)
//编译驱动 (注意Makefile的编译到移植到开发板的内核)
make arch=arm
//清除编译生成文件
make clean
******************************************
//安装驱动
insmod mycdev.ko
//卸载驱动
rmmod mycdev
需要在<内核路径>/arch/arm/boot/dts/
修改 stm32mp157a-fsmp1a-dts 文件
***************************
添加以下内容
leds{led1-gpios=<&gpioe 10 0>;//10表示引脚编号 0表示默认led2-gpios=<&gpiof 10 0>;led3-gpios=<&gpioe 8 0>; };myirq{interrupt-parent=<&gpiof>;//引用中断父节点interrupts=<9 0>,<7 0>,<8 0>;//声明和中断父节点的关系 9表示索引号,0表示默认设置 };
mycdev.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of.h>
#include <linux/of_irq.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>struct device_node *dev;
/* leds{led1-gpios=<&gpioe 10 0>;//10表示引脚编号 0表示默认led2-gpios=<&gpiof 10 0>;led3-gpios=<&gpioe 8 0>;
};*/
struct gpio_desc *gpiono1; // led1
struct gpio_desc *gpiono2; // led2
struct gpio_desc *gpiono3; // led3
/*myirq{interrupt-parent=<&gpiof>;//引用中断父节点interrupts=<9 0>,<7 0>,<8 0>;//声明和中断父节点的关系 9表示索引号,0表示默认设置
};
*/
unsigned int irqno1; // key1
unsigned int irqno2; // key2
unsigned int irqno3; // key3// 定时器处理函数
void ctl_led(struct gpio_desc *gpiono)
{// led状态取反gpiod_set_value(gpiono, !gpiod_get_value(gpiono));
}
// 中断处理函数
irqreturn_t myirq_handler(int irq, void *dev)
{if (irq == irqno1){printk("KEY1_INTERRUPT\n");ctl_led(gpiono3);}else if (irq == irqno2){printk("KEY2_INTERRUPT\n");ctl_led(gpiono2);}else if (irq == irqno3){printk("KEY3_INTERRUPT\n");ctl_led(gpiono1);}return IRQ_HANDLED;
}static int myled_to_init(int a)
{// 根据设备树节点的路径解析设备树信息dev = of_find_node_by_path("/leds");if (dev == NULL){printk("解析设备树节点失败\n");return -EFAULT;}printk("解析设备树节点成功\n");// 申请gpio_desc对象并设置输出为低电平gpiono1 = gpiod_get_from_of_node(dev, "led1-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono1)){printk("申请gpio对象失败\n");return -PTR_ERR(gpiono1);}printk("申请gpio对象成功\n");gpiono2 = gpiod_get_from_of_node(dev, "led2-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono2)){printk("申请gpio对象失败\n");return -PTR_ERR(gpiono2);}printk("申请gpio对象成功\n");gpiono3 = gpiod_get_from_of_node(dev, "led3-gpios", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono3)){printk("申请gpio对象失败\n");return -PTR_ERR(gpiono3);}printk("申请gpio对象成功\n");return 0;
}static void myled_to_exit(int a)
{// 灭灯gpiod_set_value(gpiono1, 0);gpiod_set_value(gpiono2, 0);gpiod_set_value(gpiono3, 0);// 释放gpio编号gpiod_put(gpiono1);gpiod_put(gpiono2);gpiod_put(gpiono3);printk("led注销成功");
}static int __init mycdev_init(void)
{int ret;myled_to_init(1);// 解析按键的设备树节点dev = of_find_node_by_path("/myirq");if (dev == NULL){printk("解析设备树节点失败\n");return -EFAULT;}printk("解析设备树节点成功\n");// 根据设备树节点解析出软中断号irqno1 = irq_of_parse_and_map(dev, 0); // 按键1索引号为0if (!irqno1){printk("解析软中断号1失败\n");return -ENXIO;}printk("解析软中断号1成功 irqno=%d\n", irqno1);irqno2 = irq_of_parse_and_map(dev, 1); // 按键2索引号为1if (!irqno2){printk("解析软中断号2失败\n");return -ENXIO;}printk("解析软中断号2成功 irqno=%d\n", irqno2);irqno3 = irq_of_parse_and_map(dev, 2); // 按键3索引号为2if (!irqno3){printk("解析软中断号3失败\n");return -ENXIO;}printk("解析软中断号3成功 irqno=%d\n", irqno3);// 注册中断ret = request_irq(irqno1, myirq_handler, IRQF_TRIGGER_FALLING, "key1", NULL);if (ret){printk("注册中断1失败\n");return ret;}printk("注册中断1成功\n");ret = request_irq(irqno2, myirq_handler, IRQF_TRIGGER_FALLING, "key2", NULL);if (ret){printk("注册中断2失败\n");return ret;}printk("注册中断2成功\n");ret = request_irq(irqno3, myirq_handler, IRQF_TRIGGER_FALLING, "key3", NULL);if (ret){printk("注册中断3失败\n");return ret;}printk("注册中断3成功\n");return 0;
}
static void __exit mycdev_exit(void)
{myled_to_exit(1);// 注销中断free_irq(irqno1, NULL);free_irq(irqno2, NULL);free_irq(irqno3, NULL);printk("irq注销成功\n");
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");Makefile
KERNELDIR 赋予的路径可能有所不同
modname ?= mycdev
arch ?= armifeq ($(arch),arm)
KERNELDIR := /home/ubuntu/13_UBOOT/linux-stm32mp-5.10.61-stm32mp-r2-r0/linux-5.10.61
else
KERNELDIR := /lib/modules/$(shell uname -r)/build
endifPWD := $(shell pwd)all:make -C $(KERNELDIR) M=$(PWD) modulesclean:make -C $(KERNELDIR) M=$(PWD) cleandistclean:make -C $(KERNELDIR) M=$(PWD) cleanobj-m := $(modname).o相关文章:
)
驱动开发 day8 (设备树驱动,按键中断实现led亮灭)
//编译驱动 (注意Makefile的编译到移植到开发板的内核) make archarm //清除编译生成文件 make clean ****************************************** //安装驱动 insmod mycdev.ko //卸载驱动 rmmod mycdev 需要在<内核路径>/arch/arm/boot/dts/ 修改 stm32mp157a-fsm…...

DataX将MySQL数据同步到HDFS中时,空值不处理可以吗
DataX将MySQL数据同步到HDFS中时,空值存到HDFS中时,默认是存储为\N,这样会有两个缺点: 会产生歧义,如果MySQL业务数据中有\N数据,那么存储到HDFS上是\N,null值存储也是\N,当用Hive查…...

P3373 【模板】线段树 2(乘法与加法)(内附封面)
【模板】线段树 2 题目描述 如题,已知一个数列,你需要进行下面三种操作: 将某区间每一个数乘上 x x x;将某区间每一个数加上 x x x;求出某区间每一个数的和。 输入格式 第一行包含三个整数 n , q , m n,q,m n,…...
)
实现langchain-ChatGLM API调用客户端(及未解决的问题)
langchain-ChatGLM是一个基于本地知识库的LLM对话库。其基于text2vec-large-Chinese为Embedding模型,ChatGLM-6B为对话大模型。原项目地址:https://github.com/chatchat-space/langchain-ChatGLM 对于如何本地部署ChatGLM模型,可以参考我之前…...

【AltWalker】模型驱动:轻松实现自动化测试用例的生成和组织执行
目录 模型驱动的自动化测试 优势 操作步骤 什么是AltWalker? 安装AltWalker 检查是否安装了正确的版本 牛刀小试 创建一个测试项目 运行测试 运行效果 在线模型编辑器 VScode扩展 本地部署 包含登录、选择产品、支付、退出登录的模型编写 模型效果 1…...

大数据课程E3——Flume的Sink
文章作者邮箱:yugongshiye@sina.cn 地址:广东惠州 ▲ 本章节目的 ⚪ 掌握Sink的HDFS Sink; ⚪ 掌握Sink的Logger Sink; ⚪ 掌握Sink的File Roll Sink; ⚪ 掌握Sink的Null Sink; ⚪ 掌握Sink的AVRO Sink; ⚪ 掌握Sink的Custom Sink; 一、HDFS Sink …...

如何快速做单元测试?
首先写unit test之前,要确认自己的测试遵循两个原则: 1、尽量不要干涉原来的代码。从阅读代码的体验来说,不要让你的测试(哪怕是一小段if..else...的代码)出现在你准备测试的代码中。 2、代码要只是测试某个class里面…...

不同对象的集合转换
https://blog.csdn.net/qq_42483473/article/details/128984514 import com.alibaba.fastjson.JSON;import java.util.ArrayList; import java.util.List;/*** author */ public class ObjectConversion {/*** 从List<A> copy到List<B>* param list List<B>…...
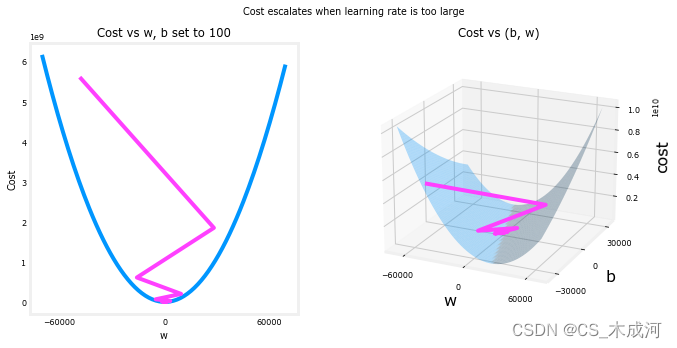
【机器学习】Gradient Descent
Gradient Descent for Linear Regression 1、梯度下降2、梯度下降算法的实现(1) 计算梯度(2) 梯度下降(3) 梯度下降的cost与迭代次数(4) 预测 3、绘图4、学习率 首先导入所需的库: import math, copy import numpy as np import matplotlib.pyplot as plt plt.styl…...

直播读弹幕机器人:直播弹幕采集+文字转语音(附完整代码)
目录 前言代码实现请求数据解析数据文字转语音完整代码 高级点的tk界面版 前言 直播读弹幕机器人是指能够实时读取直播平台上观众发送的弹幕,并将其转化为语音进行播放的机器人。这种机器人通常会使用文字转语音技术,将接收到的弹幕文本转为语音&#x…...
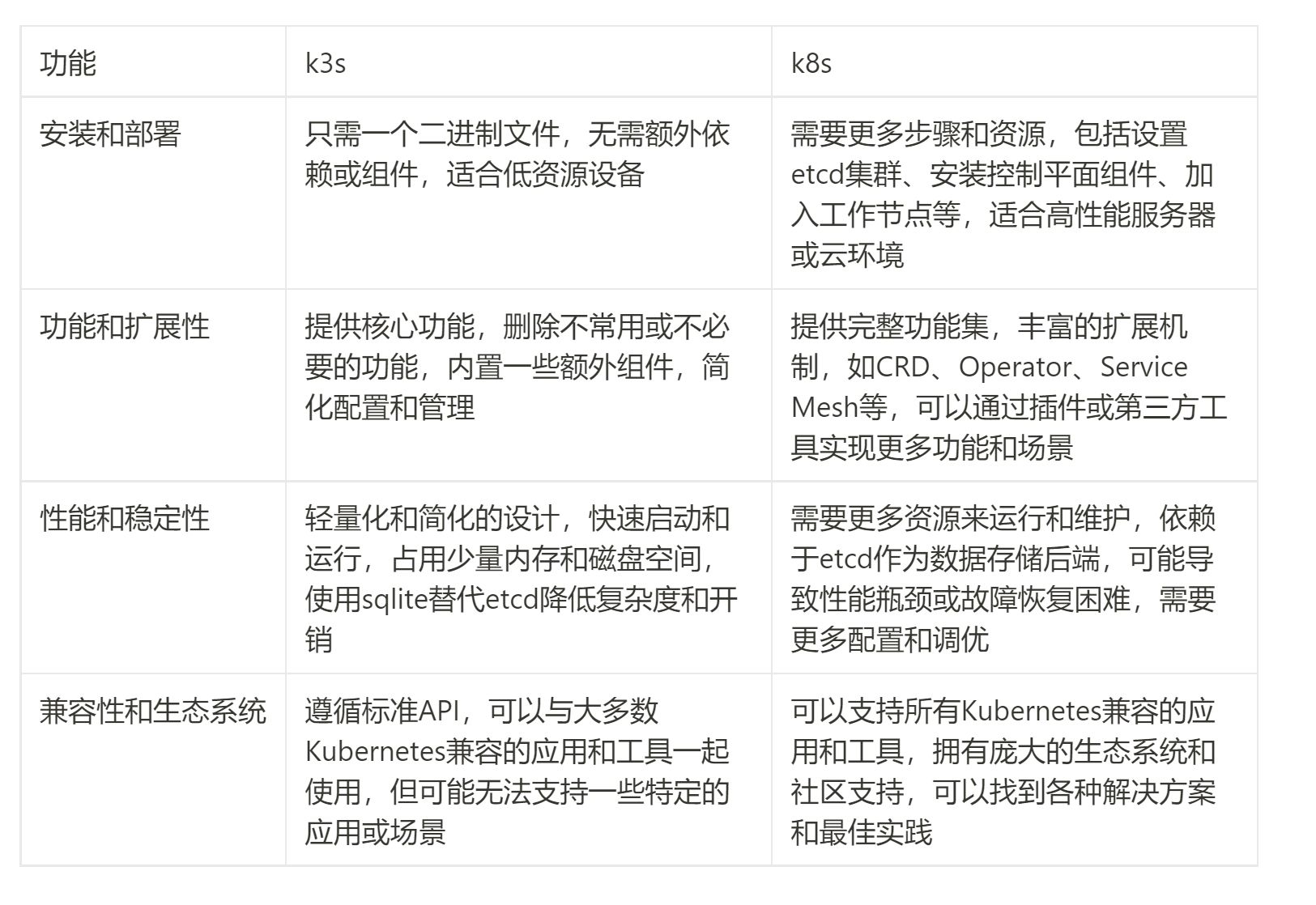
K3s vs K8s:轻量级对决 - 探索替代方案
在当今云原生应用的领域中,Kubernetes(简称K8s)已经成为了无可争议的领导者。然而,随着应用规模的不断增长,一些开发者和运维人员开始感受到了K8s的重量级特性所带来的挑战。为了解决这一问题,一个名为K3s的…...
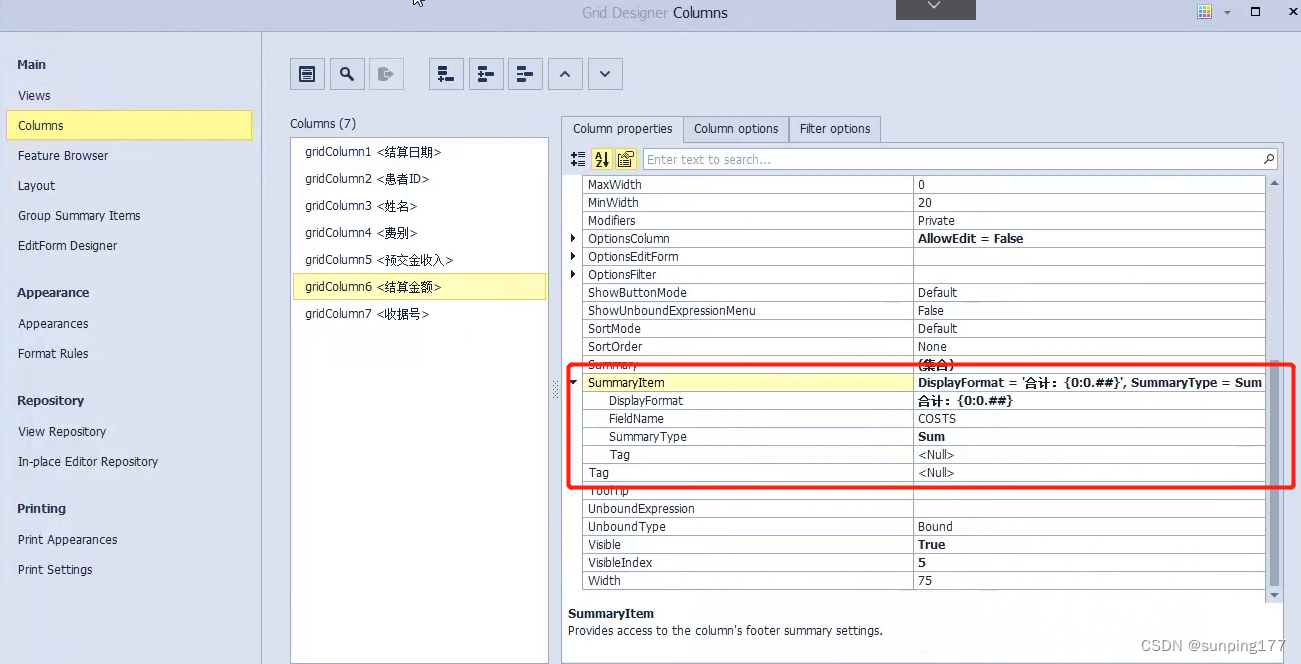
dev控件gridControl,gridview中添加合计
需求:在合并结账查询中,双击每一条结账出现这次结账对应的结算明细: 弹出的页面包括:结算日期,ID,姓名,费别,预交金收入,结算金额,收据号,合计&a…...

SpringBoot基础认识
创建SpringBoot模块 首先需要引设置maven并引用maven环境 1.打开项目结构,new module,选择Spring Initializr,URL选默认: group填写分组如com.kdy , Artifact起个模块名如springboot_quickstart,Type选择M…...
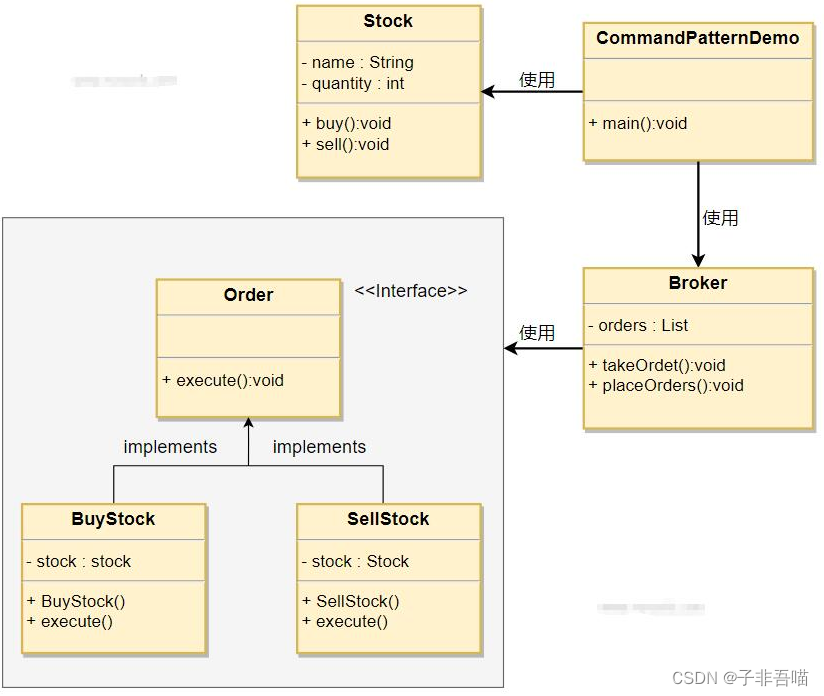
二十三种设计模式第十九篇--命令模式
命令模式是一种行为设计模式,它将请求封装成一个独立的对象,从而允许您以参数化的方式将客户端代码与具体实现解耦。在命令模式中,命令对象充当调用者和接收者之间的中介。这使您能够根据需要将请求排队、记录请求日志、撤销操作等。 命令模…...

STM32基础入门学习笔记:基础知识和理论 开发环境建立
文件目录: 一:基础知识和理论 1.ARM简介 2.STM32简介 3.STM32命名规范 4.STM32内部功能* 5.STM32接口定义 二:开发环境建立 1.开发板简介 2.ISP程序下载 3.最小系统电路 4.KEIL的安装 5.工程简介与调试流程 6.固件库的安装 7.编…...
Qt应用开发(基础篇)——数值微调输入框QAbstractSpinBox、QSpinBox、QDoubleSpinBox
目录 一、前言 二、QAbstractSpinBox类 1、accelerated 2、acceptableInput 3、alignment 4、buttonSymbols 5、correctionMode 6、frame 7、keyboardTracking 8、readOnly 9、showGroupSeparator 10、specialValueText 11、text 12、wrapping 13、信号 二、Q…...

html | 无js二级菜单
1. 效果图 2. 代码 <meta charset"utf-8"><style> .hiddentitle{display:none;}nav ul{list-style-type: none;background-color: #001f3f;overflow:hidden; /* 父标签加这个,防止有浮动子元素时,该标签失去高度*/margin: 0;padd…...
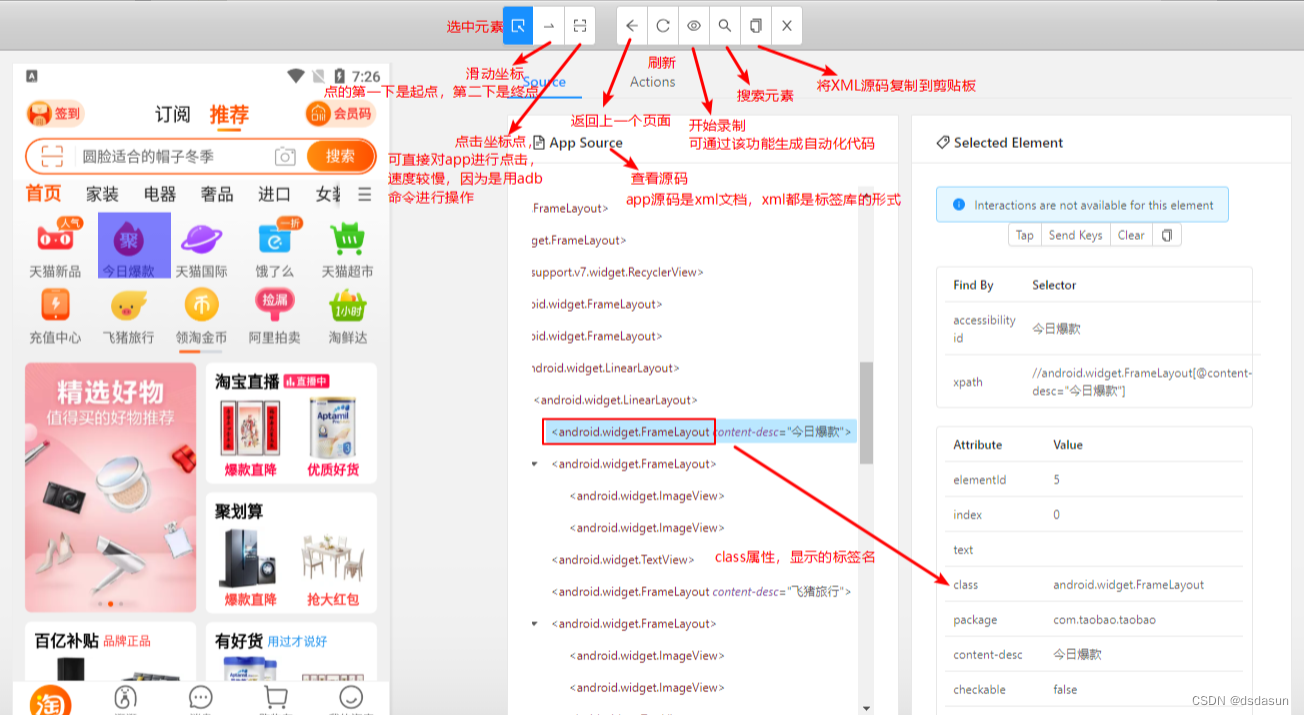
appium的基本使用
appium的基本使用 一、appium的基本使用appium环境安装1、安装Android SDK 2、安装Appium3、安装手机模拟器4、Pycharm安装 appium-python-alicent5、连接appium和模拟器6、Python代码调用appium软件,appium软件在通过adb命令调用android操作系统(模拟器…...
Dockerfile构建nginx镜像(编译安装)
Dockerfile构建nginx镜像 1、建立工作目录 [rootdocker ~]# mkdir nginx [rootdocker ~]# cd nginx/ 2、编写Dockerfile文件 [rootdocker nginx]# vim run.sh [rootdocker nginx]# vim Dockerfile #基于的基础镜像 FROM centos:7#镜像作者信息 MAINTAINER Crushlinux <…...

手机屏幕视窗机器视觉定位软硬件-康耐德
【检测目的】 手机屏幕视窗视觉定位 【效果图片】 【安装示意图】 【硬件配置】...

终极环境数据分析工具Ladybug完整指南:5分钟掌握天气数据可视化
终极环境数据分析工具Ladybug完整指南:5分钟掌握天气数据可视化 【免费下载链接】ladybug 🐞 Core ladybug library for weather data analysis and visualization 项目地址: https://gitcode.com/gh_mirrors/lad/ladybug 你是一个文章写手&#…...

破冰总结:写给 QA 的一份 30 天 AI 技术转型学习路线图
写在前面:一个不得不面对的现实 打开招聘网站,搜索“高级QA工程师”,你会发现薪资最高的一批岗位都有同一个关键词:AI。不是指“用AI写测试用例”那种浮于表面的用法,而是要求你真正理解AI系统的工作原理、能评估模型输出质量、能设计对抗性测试方案、能把RAG管线部署到生…...

盒子不同定位的解说!
目录 一、相对定位 二、绝对定位 三、固定定位 一、相对定位 【概念】:简单来说,就是让一个元素相对于它自己原本应该在的位置进行移动。 【核心特点】:1.不脱离文档流:这是相对定位最关键的特点。元素虽然移动了,…...
)
游戏开发团队必须立即升级的语音合成栈:Llama-3-TTS开源模型实测对比(RTX 4090 vs. Snapdragon 8 Gen3)
更多请点击: https://codechina.net 第一章:AI语音合成在游戏开发中的应用 AI语音合成(Text-to-Speech, TTS)正深刻重塑游戏叙事、角色交互与本地化工作流。相比传统预录语音,实时TTS可动态生成符合上下文语境、情绪状…...

早上好呀
早上好...

OpenHarmony芯片解决方案:从硬件抽象到编译配置实战指南
1. 项目概述:从零理解OpenHarmony芯片解决方案如果你正在或准备踏入OpenHarmony的硬件开发领域,那么“芯片解决方案”这个概念,就是你绕不开的第一道门槛。它不像写一个纯应用层的“Hello World”程序那么简单,而是连接你手中那块…...

2026年获客成本飙升?GEO优化让线索成本降低60%
2026年获客成本飙升?GEO优化让线索成本降低60% 摘要 :传统获客方式成本越来越高,百度竞价按点击付费,展会一次花费数万,线索成本难以下降。本文介绍一种新的获客方式——GEO优化,通过AI搜索优化直接触达目标…...
)
别再乱用sleep了!Linux C++高精度延时实战指南(从usleep到std::sleep_for的避坑总结)
Linux C高精度延时实战:从传统陷阱到现代方案 在开发高性能服务器、嵌入式实时系统或音视频处理程序时,精确控制时间延迟是保证系统稳定性和响应速度的关键。许多开发者在使用sleep、usleep等延时函数时,常常遇到CPU占用率飙升、时序漂移或信…...

暗黑破坏神2存档编辑器终极指南:5分钟掌握Diablo Edit2核心功能
暗黑破坏神2存档编辑器终极指南:5分钟掌握Diablo Edit2核心功能 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 你是否曾经因为暗黑破坏神2中角色技能点分配失误而苦恼?是否…...

FNF-PsychEngine终极指南:3个Lua脚本技巧让游戏体验飙升
FNF-PsychEngine终极指南:3个Lua脚本技巧让游戏体验飙升 【免费下载链接】FNF-PsychEngine Engine originally used on Mind Games mod 项目地址: https://gitcode.com/gh_mirrors/fn/FNF-PsychEngine FNF-PsychEngine是一款功能强大的节奏游戏引擎ÿ…...