Vision Transformer (ViT):图像分块、图像块嵌入、类别标记、QKV矩阵与自注意力机制的解析
作者:CSDN @ _养乐多_
本文将介绍Vision Transformers (ViT)中的关键点。包括图像分块(Image Patching)、图像块嵌入(Patch Embedding)、类别标记、(class_token)、QKV矩阵计算过程、余弦相似度(cosine similarity)、Softmax、自注意力机制等概念。主要介绍QKV矩阵计算过程。
文章目录
- 一、Image Patching
- 二、Patch Embedding
- 三、Class token
- 3.1 Add Class token
- 3.2 Positional Encoding
- 四、QKV
- 4.1 cosine similarity
- 4.2 Q @ K T K^{T} KT
- 4.3 softmax( (Q @ K T K^{T} KT) / d k \sqrt{dk} dk )
- 4.4 A @ V
一、Image Patching
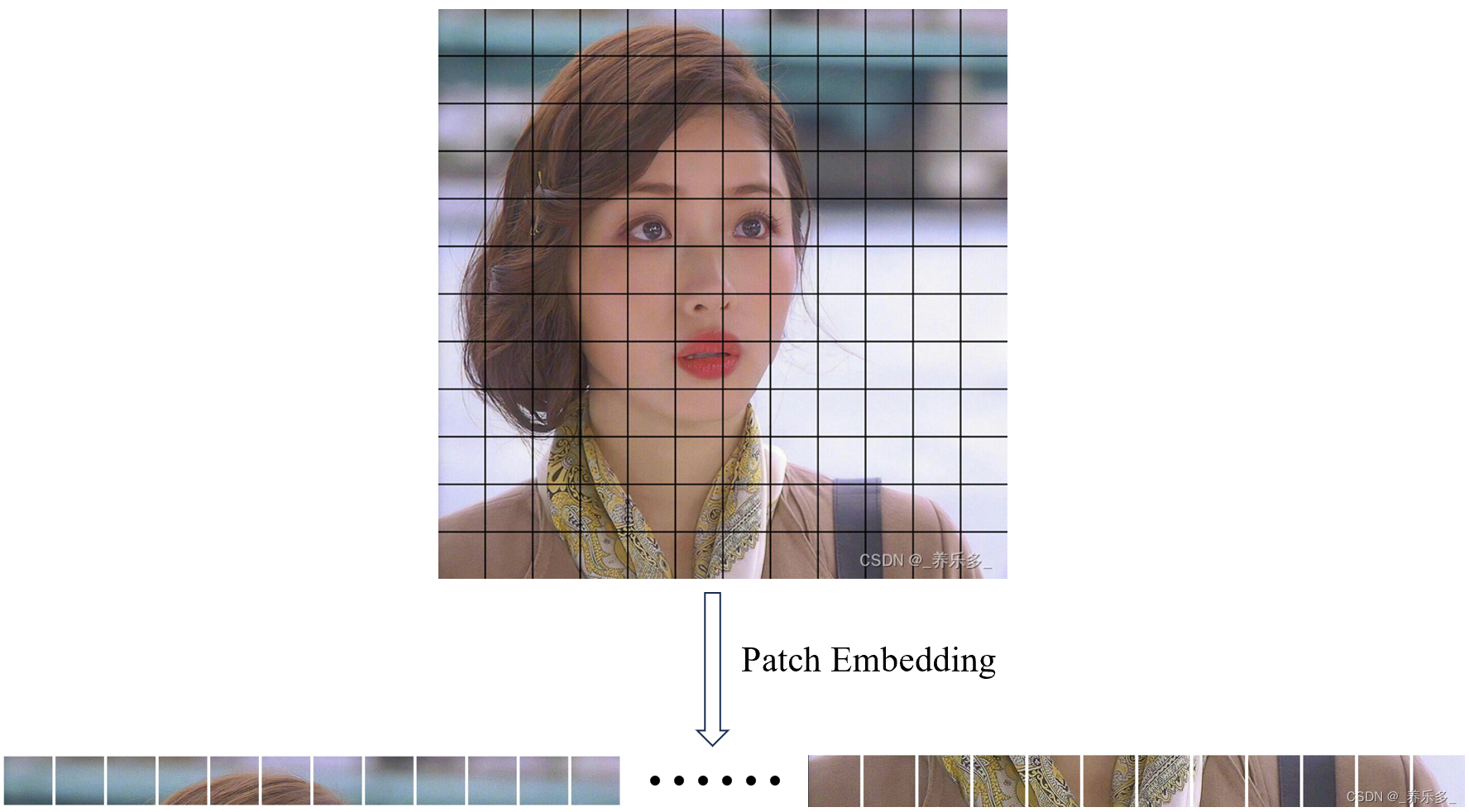
图像被分成小的块的过程是 “Image Patching”(图像分块)或者简称 “Patching”。在这个过程中,图像被划分成一系列大小相同或不同的小块,这些小块通常被称为 “Image Patches”(图像块)或简称 “Patches”。
图像分块(Image Patching)过程如图所示,

“Patch” 是指图像中的一个小块区域或片段。这个概念通常用于将大尺寸的图像分解成更小的部分,以便对每个小块进行单独处理、分析或特征提取。
将图像分成小块(即 Patch)可以带来的优势:
-
特征提取:在一些任务中,特定区域的信息比整个图像更有用。通过对每个 Patch 进行特征提取,可以获得更细粒度的信息,有助于更好地理解图像内容。
-
处理大尺寸图像:对于非常大的图像,可能会遇到计算和存储方面的限制。将图像分成小的 Patch 可以帮助降低计算复杂度,并且可以更轻松地处理这些小尺寸的块。
-
自适应性:在一些自适应处理的算法中,对于不同的图像区域采取不同的策略是很常见的。将图像划分成 Patch 可以使算法在局部区域上更加灵活和自适应。
二、Patch Embedding
“Patch Embedding” 是一个计算机视觉领域的概念,它与图像处理和深度学习中的卷积神经网络(Convolutional Neural Networks,CNN)相关。
传统的卷积神经网络在图像处理时使用的是像素级的操作,通过卷积核在图像上滑动进行特征提取。而在"Patch Embedding"中,这个概念引入了更高级的特征表示方式。它将输入的图像分成小的块(也称为“patch”),然后将每个小块转换为低维的向量表示。这种向量表示可以被用作后续任务的输入。
Patch Embedding的目的在于降低计算复杂度并提高特征提取的效率。由于在传统的卷积操作中,相邻的像素通常会有大量重叠,而Patch Embedding将图像分成块后,可以减少冗余计算,同时保留了重要的特征信息。
三、Class token
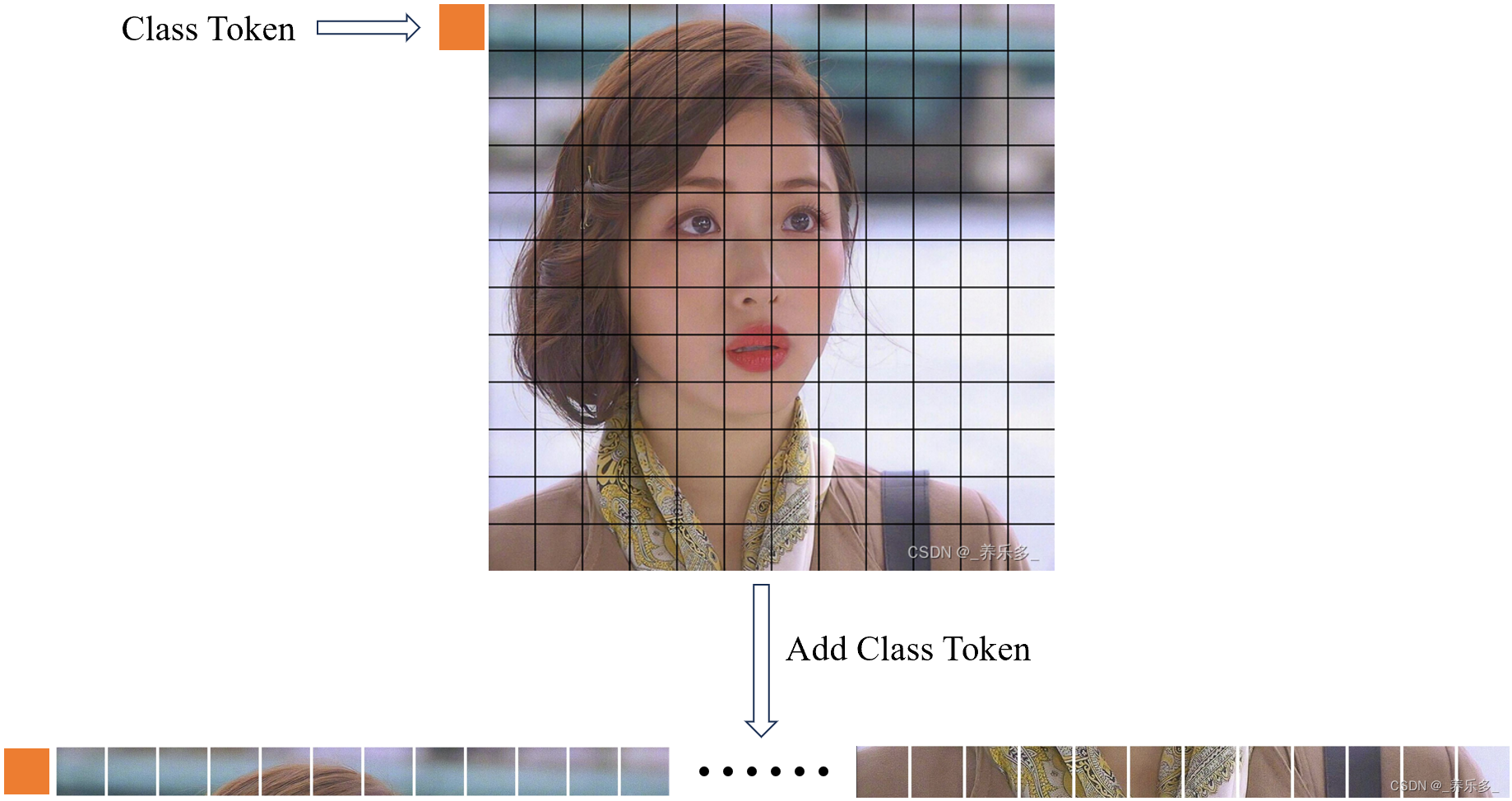
“Class token” 是一个特殊的令牌,用于表示整个图像的类别信息。通常,它会被添加到 Patch Embedding 后得到的向量序列中的某个位置,使得模型能够利用这个类别信息进行分类或生成任务。
3.1 Add Class token
在Transformer模型中,“Class token” 通常被添加在输入序列的开头,并且在训练过程中会经过特定的注意力机制,以使得模型能够对类别信息进行编码和利用。
在 Patch Embedding 操作之后,“Class token” 被添加到 Patch Embedding 向量序列的开头,用于表示整个图像的类别信息,以辅助后续的图像分类或生成任务。
下面举例说明Class token,假设此次应用是为了分类图像是不是石原里美。我们使用 one-hot 编码的方式表示类别信息。那么类别信息就有两种,是和不是,现在用向量 [1, 0] 表示是,[0, 1] 表示不是。那么class_token就是 [1, 0] 或者 [0, 1] 。
现在,我们将这个 “Class token” 与每个小块的 Patch Embedding 向量连接在一起,得到最终的输入序列。假设得到的 196 个 Patch Embedding 向量分别为:
[v1, v2, v3, ..., v196]
那么,添加 “Class token” 后的最终输入序列为:
[Class_token, v1, v2, v3, ..., v196]
这样,整个输入序列中的第一个向量就是 “Class token”,它包含了整个图像的类别信息,即图像属于是不是石原里美。模型在训练过程中可以利用这个类别信息,帮助进行图像分类任务。
往细一点讲,假设 v1 是一个 2 维向量,表示为:
v1 = [0.2, 0.7]
这个向量表示第一个小块的特征。现在,我们将 “Class token” 和 v1 连接在一起,得到最终的输入序列:
[Class_token, v1]
假设 “Class token” 表示图像属于石原里美的类别,它的 one-hot 编码为:
[1, 0]
那么最终的输入序列是:
[[1, 0], [0.2, 0.7]]
这个输入序列包含了整个图像的类别信息(属于石原里美的概率为 1,不是石原里美的概率为 0)以及第一个小块的特征向量 [0.2, 0.7]。
3.2 Positional Encoding
在了解了class token 以后,我们来看看 vit 中的 class token 。
在 Vision Transformer (ViT) 模型中,“PE” 表示位置编码(Positional Encoding),用于将图像中的每个 Patch Embedding 向量与其位置信息相关联,用于将整个图像的全局位置信息引入到 Transformer 模型中。
位置编码是为了给 Transformer 模型提供输入序列中的位置信息,因为 Transformer 模型没有像卷积神经网络那样显式地保留位置信息。在自然语言处理任务中,输入是一个词语序列,为了保留词语的位置信息,通常会添加位置编码。类似地,在 ViT 中,输入是图像的 Patch Embedding 序列,为了保留 Patch 的位置信息,也需要添加位置编码。
在 ViT 中,PE(pos, 2i) 和 PE(pos, 2i + 1) 是用来计算 “Class token” 的位置编码公式。位置编码使用的是 sin 和 cos 函数来计算。对于 “Class token” 的位置编码,计算方式为:
P E ( p o s , 2 i ) = s i n ( p o s / 1000 0 2 i / d m o d e l ) PE(pos, 2i) = sin(pos / 10000^{2i / dmodel}) PE(pos,2i)=sin(pos/100002i/dmodel)
P E ( p o s , 2 i + 1 ) = c o s ( p o s / 1000 0 2 i / d m o d e l ) PE(pos, 2i + 1) = cos(pos / 10000^{2i / dmodel}) PE(pos,2i+1)=cos(pos/100002i/dmodel)
位置编码采用了正弦和余弦函数的形式,其中 PE(pos, 2i) 是对应维度为偶数的位置编码,PE(pos, 2i + 1) 是对应维度为奇数的位置编码。在计算时,pos 表示 Patch 在序列中的位置,i 是位置编码的维度索引,从 0 开始,dmodel 是 Transformer 模型中的隐藏层维度(也称为特征维度)。
这种位置编码的计算方式在 Transformer 中是常见的,它使得不同位置的 Patch Embedding 向量在特征空间上具有不同的位置偏移,以便于模型在处理序列数据时考虑到它们的相对位置关系。
为了更好地说明位置编码的计算过程,我们来举一个简化的例子。假设我们有一个图像,将其分成 4x4 个小块(Patch),共计 16 个小块,每个小块用一个 2 维向量表示。我们假设隐藏层大小(d_model)为 4。
现在,我们来计算 “Class token” 和每个小块的位置编码。
首先,“Class token” 的位置为整个图像,我们可以选择一个虚拟的位置编号 pos = 0 来表示 “Class token” 的位置。然后,我们计算 “Class token” 的位置编码:
d_model = 4
i = 0PE(pos=0, 2i) = sin(0 / 10000^(2*0 / 4)) = sin(0) = 0
PE(pos=0, 2i + 1) = cos(0 / 10000^(2*0 / 4)) = cos(0) = 1
所以 “Class token” 的位置编码为 [0, 1]。
接下来,我们计算每个小块的位置编码。假设小块的位置编号从 1 到 16。我们可以使用以下公式来计算每个小块的位置编码:
d_model = 4
i = 0, 1, 2, 3pos = 1
PE(pos=1, 2*0) = sin(1 / 10000^(2*0 / 4)) = sin(1) ≈ 0.8415
PE(pos=1, 2*0 + 1) = cos(1 / 10000^(2*0 / 4)) = cos(1) ≈ 0.5403pos = 2
PE(pos=2, 2*0) = sin(2 / 10000^(2*0 / 4)) = sin(2) ≈ 0.9093
PE(pos=2, 2*0 + 1) = cos(2 / 10000^(2*0 / 4)) = cos(2) ≈ -0.4161
…
依此类推,计算每个小块的位置编码。最终得到每个小块的位置编码的结果。
请注意,这只是一个简化的例子,并且隐藏层大小(d_model)和小块的位置编号可能会根据实际情况有所不同。实际中,ViT 模型使用更高维度的隐藏层,并且位置编号会更加复杂。这里的目的是为了演示位置编码的计算过程。
四、QKV
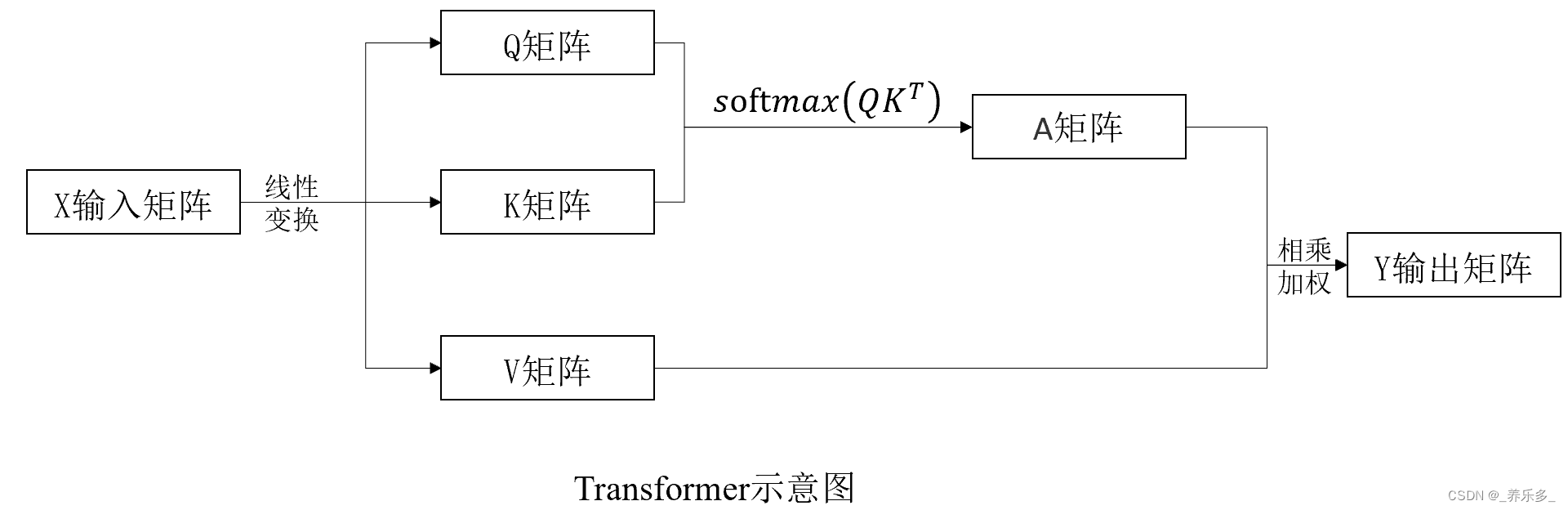
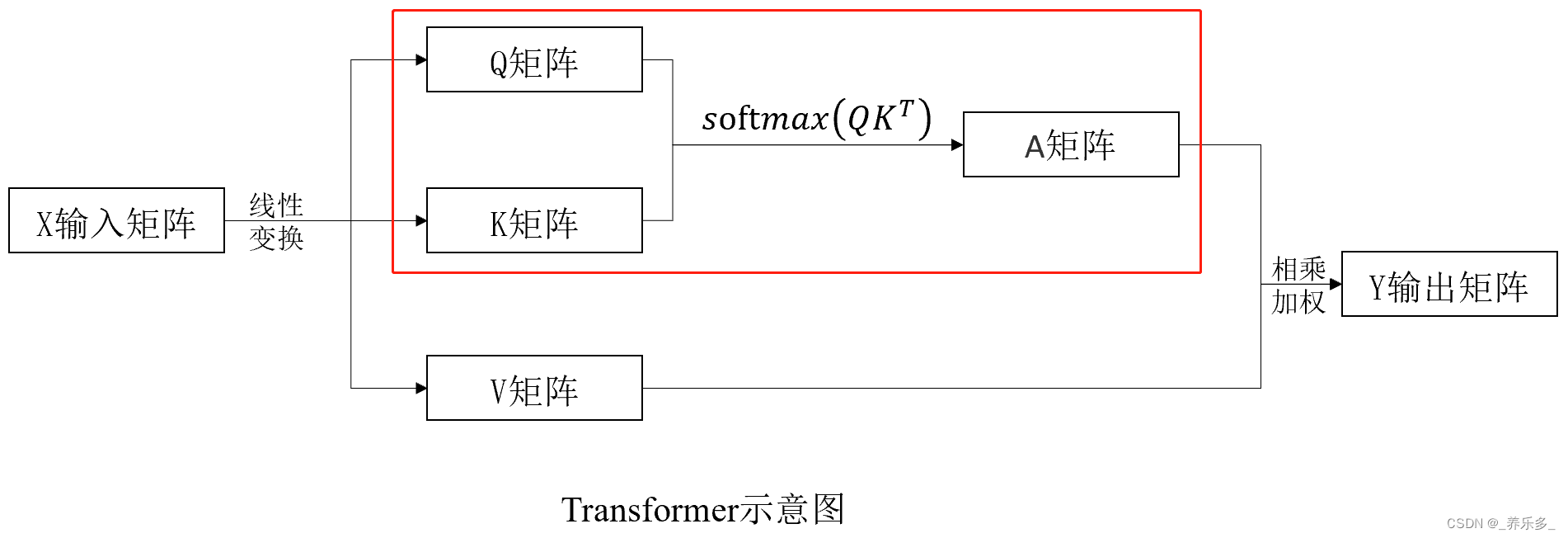
如上图所示,QKV 矩阵是在自注意力机制(Self-Attention Mechanism)中用于计算注意力权重的三个矩阵。这三个矩阵通常是通过对输入序列进行线性变换得到的。它们分别是:
-
Q矩阵(Query Matrix):Q矩阵用于生成查询向量,每个查询向量代表一个小块(Patch)在注意力机制中的查询,即用于寻找与当前小块相关的信息。
-
K矩阵(Key Matrix):K矩阵用于生成键向量,每个键向量代表一个小块(Patch)在注意力机制中的键,即用于表示当前小块与其他小块之间的关系。
-
V矩阵(Value Matrix):V矩阵用于生成值向量,每个值向量代表一个小块(Patch)在注意力机制中的值,即用于表示当前小块的特征信息。
首先需要知道的是X矩阵和Y矩阵的维度大小是一样的,输入维度和输入维度一样。
具体来说,在自注意力机制中,输入序列首先通过三个不同的线性变换,分别得到查询矩阵 Q、键矩阵 K 和值矩阵 V。 这三个矩阵将用于计算注意力权重,从而对输入序列进行加权求和,得到最终的表示。
其中,Q和K的点乘得到的矩阵就是注意力权重矩阵A。假设如果只有V矩阵,不经过Q和K的过程,那么这就算是普通的网络,没有加入注意力机制。
假设不管你用什么线性变换方法,也不过你线性变换用了多少隐藏层(这部分自行百度),现在我们得到了QKV矩阵,并且添加了 class token。如下图所示,
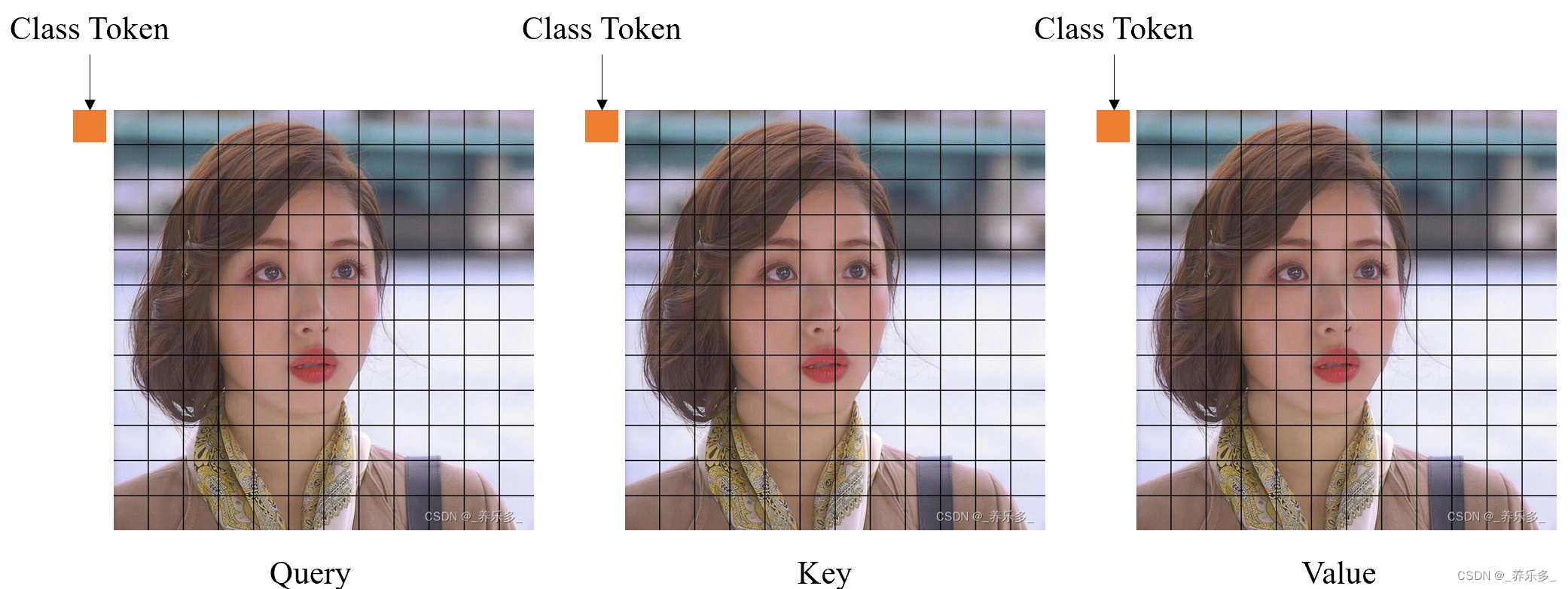
当然我们计算的时候,QKV都是被拉伸成了一行,为了方便表示,这里画的还是矩形形式。
4.1 cosine similarity
在了解Q和K点乘之前,需要理解余弦相似度的概念。因为Q和K的点乘就是在比较其余弦相似度大小,如果Q中第一个patch和K中所有patch相比较,进行点乘,那么他们的余弦相似度会被计算。
余弦相似度越大,自注意力权重越大。
下面是余弦相似度的概念和计算方式,
余弦相似度是一种用于衡量两个向量之间相似性的度量方法,常用于计算两个向量的方向是否相似。在余弦相似度中,向量的长度并不影响相似度的计算,因此它更关注向量的方向。
假设有两个向量 A 和 B,它们可以表示为:
A = [ a 1 , a 2 , a 3 , . . . , a n ] A = [a₁, a₂, a₃, ..., aₙ] A=[a1,a2,a3,...,an]
B = [ b 1 , b 2 , b 3 , . . . , b n ] B = [b₁, b₂, b₃, ..., bₙ] B=[b1,b2,b3,...,bn]
其中 a₁、a₂、…、aₙ 和 b₁、b₂、…、bₙ 分别是两个向量的元素。
余弦相似度的计算公式如下:
c o s i n e _ s i m i l a r i t y = ( A ⋅ B ) / ( ∣ ∣ A ∣ ∣ ∗ ∣ ∣ B ∣ ∣ ) cosine\_similarity = (A·B) / (||A|| * ||B||) cosine_similarity=(A⋅B)/(∣∣A∣∣∗∣∣B∣∣)
其中,
- A·B 表示向量 A 和向量 B 的点积(内积),即 a₁ * b₁ + a₂ * b₂ + … + aₙ * bₙ。
- ||A|| 表示向量 A 的范数(或长度),即 √(a₁² + a₂² + … + aₙ²)。
- ||B|| 表示向量 B 的范数,即 √(b₁² + b₂² + … + bₙ²)。
计算余弦相似度时,首先计算向量 A 和向量 B 的点积,然后分别计算它们的范数。最后将点积除以两个向量的范数的乘积,得到余弦相似度值。余弦相似度的取值范围在 -1 到 1 之间,
- 当余弦相似度为 1 时,表示两个向量的方向完全相同,即它们在空间中指向相同的方向。
- 当余弦相似度为 -1 时,表示两个向量的方向完全相反,即它们在空间中指向相反的方向。
- 当余弦相似度为 0 时,表示两个向量的方向垂直,即它们在空间中互相垂直。
4.2 Q @ K T K^{T} KT
下面我们来看一看 Q 和 K 计算权重矩阵A的过程,如图红框中的过程,
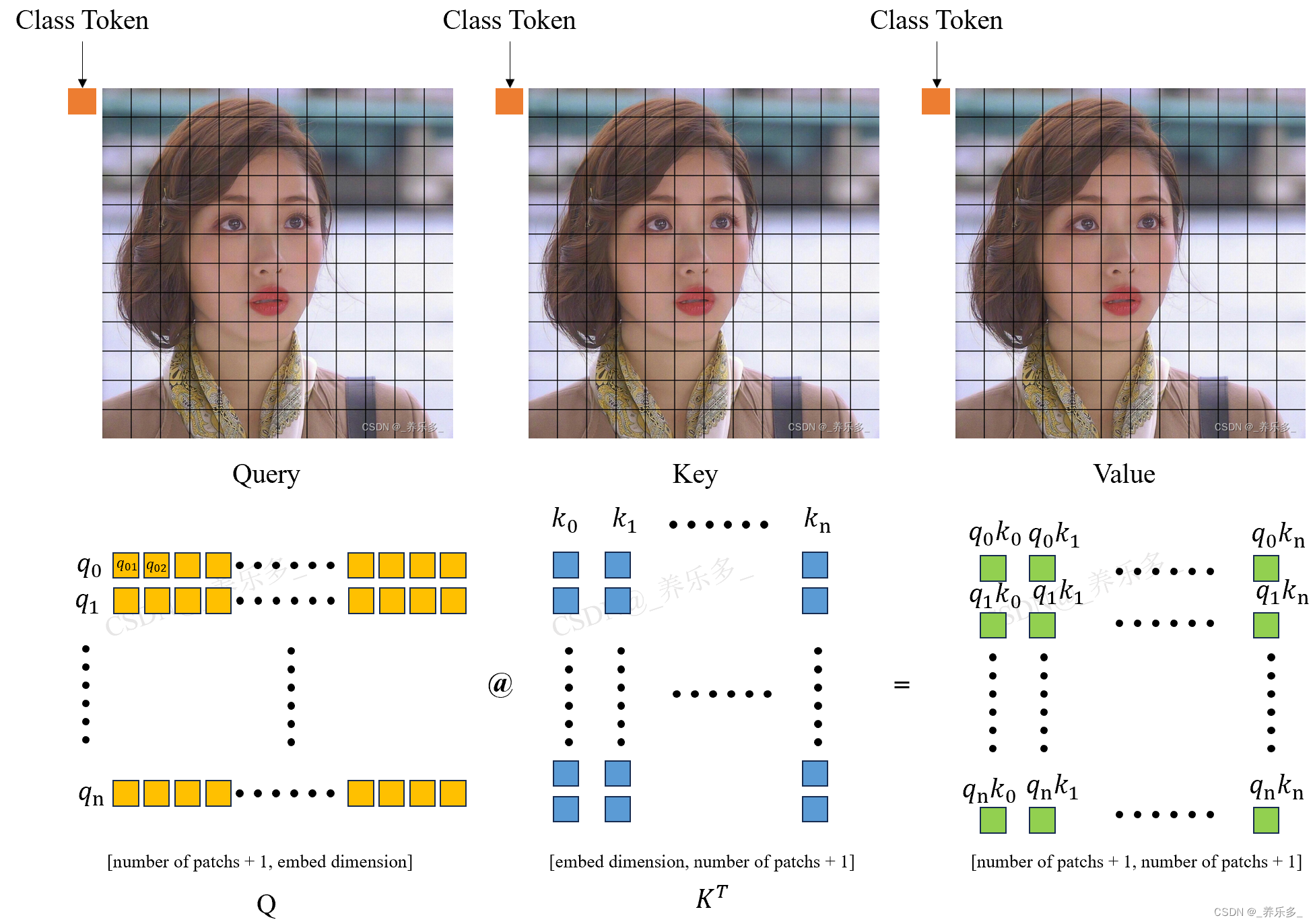
如上图所示,假设黄色矩形表示Q矩阵中的元素,蓝色矩形表示 K T K^{T} KT矩阵中的元素,绿色矩形表示Q点乘K之后的结果矩阵中的元素。其中,q0表示一行,k0表示一列,q0k0表示黄色的一行和蓝色的一列点乘得到的一个数。
这里的 q0 就是 class_token 拉成一维的向量,q1 就是 Q 矩阵(石原里美图片)第一个 patch 向量;k0就是 K 矩阵转置后的矩阵的一列,表示的是 class_token 拉成一维的向量,k1是 K 矩阵(石原里美图片)第一个 patch 向量。
4.3 softmax( (Q @ K T K^{T} KT) / d k \sqrt{dk} dk )
首先,让给我们了解一下 Softmax 函数。Softmax 是一种用于将向量元素转换为概率分布的函数。给定一个输入向量 z = [z₁, z₂, …, zₙ],Softmax 函数将每个元素 zᵢ 转换为一个概率值 pᵢ,使得所有概率值的和等于 1。
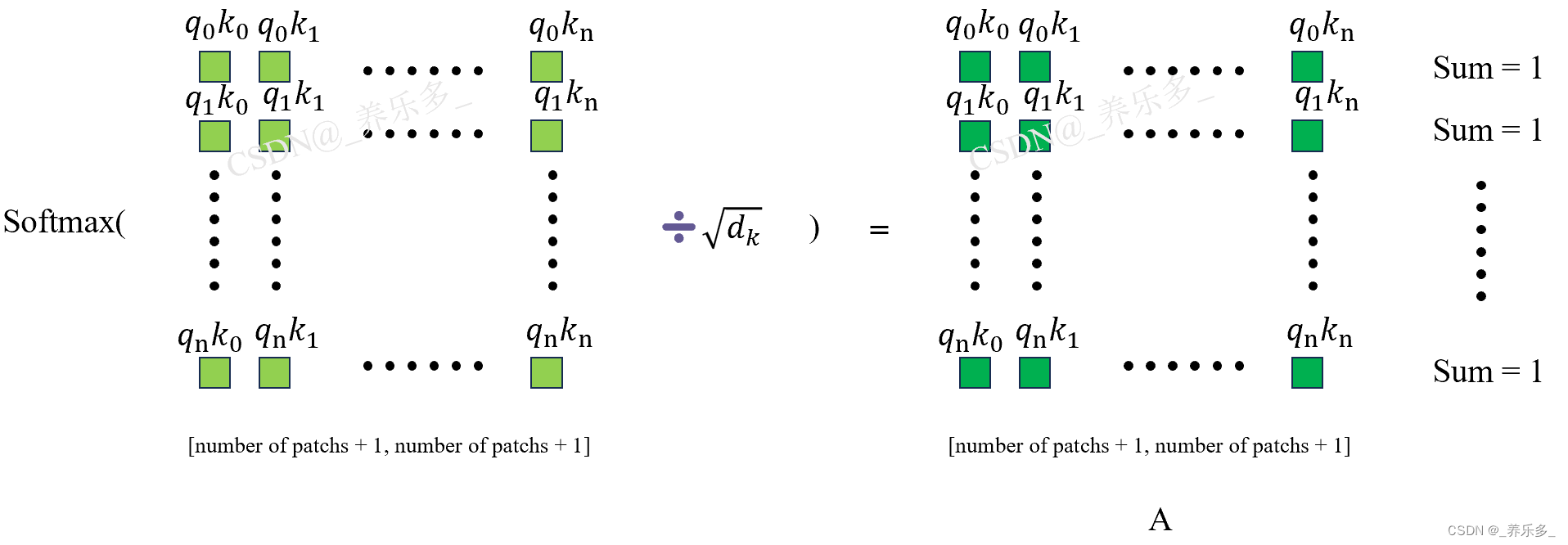
举个例子,这里将q0k0、q0k1…q0kn的值转变为概率值,并将他们的和变为1。
在自注意力机制中,除以 d k \sqrt{d_k} dk 是为了缩放注意力权重,从而避免在深度较大的 Transformer 模型中由于注意力权重过大造成的梯度爆炸问题。
这里的 dk 是模型中注意力头(attention head)的维度(dimension),那么点积结果的大小为 dk ,而不同位置之间的点积结果的值范围可能差异较大。如果不进行缩放,一些较大的点积值在经过 Softmax 后可能会变得非常大,而较小的点积值在经过 Softmax 后可能接近于0。这会导致注意力权重的巨大差异,使得一些位置对其他位置的影响过大或过小,从而影响模型的学习和泛化能力。
通过除以 d k \sqrt{d_k} dk,可以将点积结果进行缩放,使得所有点积结果的范围相对稳定,不会出现过大或过小的情况。这样,Softmax 后得到的注意力权重就会相对均衡,并且更有利于模型学习有效的全局关系和表示。
4.4 A @ V
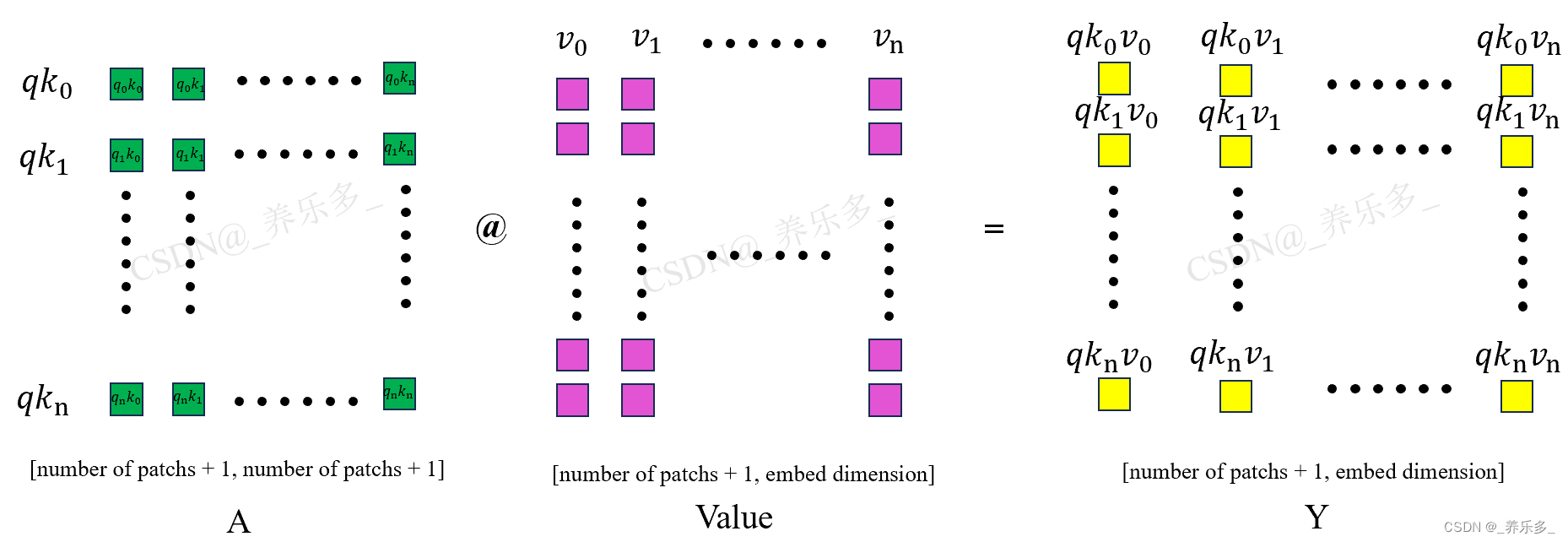
如图所示,经过之前的计算,我们已经得到了权重 A 矩阵,将 A 和 Value 矩阵点乘,就是将注意力权重矩阵应用到 V 矩阵上了。图中黄色的矩形就是经过注意力机制计算得到的 Y 矩阵。Y 矩阵的维度和X 输入矩阵的维度是一模一样的。所以说 Transform 是一个即插即用的模块。
这里的qk0是 A 权重矩阵的一行,v0是 Value 矩阵的一列,qk0v0是它们点乘以后得到的一个数(即q0k0v00+q0k1v10+q0k2v20+…)。
声明:
本人作为一名作者,非常重视自己的作品和知识产权。在此声明,本人的所有原创文章均受版权法保护,未经本人授权,任何人不得擅自公开发布。
本人的文章已经在一些知名平台进行了付费发布,希望各位读者能够尊重知识产权,不要进行侵权行为。任何未经本人授权而将付费文章免费或者付费(包含商用)发布在互联网上的行为,都将视为侵犯本人的版权,本人保留追究法律责任的权利。
谢谢各位读者对本人文章的关注和支持!
相关文章:
Vision Transformer (ViT):图像分块、图像块嵌入、类别标记、QKV矩阵与自注意力机制的解析
作者:CSDN _养乐多_ 本文将介绍Vision Transformers (ViT)中的关键点。包括图像分块(Image Patching)、图像块嵌入(Patch Embedding)、类别标记、(class_token)、QKV矩…...

Mybatis:一对多映射处理
Mybatis:一对多映射处理 前言一、概述二、创建数据模型三、问题四、解决方案1、方案一:collection(嵌套结果)2、方案二:分步查询(嵌套查询) 前言 本博主将用CSDN记录软件开发求学之路上的亲身所…...

HTML+CSS+JavaScript:全选与反选案例
一、需求 1、单击全选按钮,下面三个复选框自动选中,再次单击全选按钮,下面三个复选框自动取消选中 2、当下面三个复选框全都选中时,全选按钮自动选中,下面三个复选框至少有一个未选中,全选按钮自动取消选…...

Python 程序设计入门(001)—— 安装 Python(Windows 操作系统)
Python 程序设计入门(001)—— 安装 Python(Windows 操作系统) 目录 Python 程序设计入门(001)—— 安装 Python(Windows 操作系统)一、下载 Python 安装包二、安装 Python三、测试&…...
【redis】创建集群
这里介绍的是创建redis集群的方式,一种是通过create-cluster配置文件创建部署在一个物理机上的伪集群,一种是先在不同物理机启动单体redis,然后通过命令行使这些redis加入集群的方式。 一,通过配置文件创建伪集群 进入redis源码…...
linux 配置nacos遇见的问题及解决办法
本次的集群是启动一个服务的三个不同端口,配置如下: 一.application.properties 加上下列配置,目的是使用自己的mysql数据库: spring.datasource.platformmysql db.num1 db.url.0jdbc:mysql://127.0.0.1:3306/nacos_config?s…...

小程序开发趋势:探索人工智能在小程序中的应用
第一章:引言 小程序开发近年来取得了快速的发展,成为了移动应用开发的重要一环。随着人工智能技术的飞速发展,越来越多的企业开始探索如何将人工智能应用于小程序开发中,为用户提供更智能、便捷的服务。本文将带您一起探索人工智能…...

基于埋点日志数据的网络流量统计 - PV、UV
水善利万物而不争,处众人之所恶,故几于道💦 文章目录 一、 网站总流量数统计 - PV 1. 需求分析 2. 代码实现 方式一 方式二 方式三:使用process算子实现 方式四:使用process算子实现 二、网站独立访客数统计 - UV 1. …...

cuda入门demo(2)——最基础的二方向sobel
⚠️主要是自己温习用,只保证代码正确性,不保证讲解的详细性。 今天继续总结cuda最基本的入门demo。很多教程会给你说conv怎么写,实际上sobel也是conv,并且conv本身已经用torch实现了。 之前在课题中尝试了sobel的变体࿰…...
软件外包开发的后台开发语言
在软件外包开发中,后台语言的选择通常取决于项目需求、客户偏好、团队技能和开发效率。今天和大家分享一些常用的后台语言及选择它们的原因,希望对大家有所帮助。北京木奇移动技术有限公司,专业的软件外包开发公司,欢迎交流合作。…...
自动驾驶感知系统-全球卫星定位系统
卫星定位系统 车辆定位是让无人驾驶汽车获取自身确切位置的技术,在自动驾驶技术中定位担负着相当重要的职责。车辆自身定位信息获取的方式多样,涉及多种传感器类型与相关技术。自动驾驶汽车能够持续安全可靠运行的一个关键前提是车辆的定位系统必须实时…...
数据结构 | 基本数据结构——队列
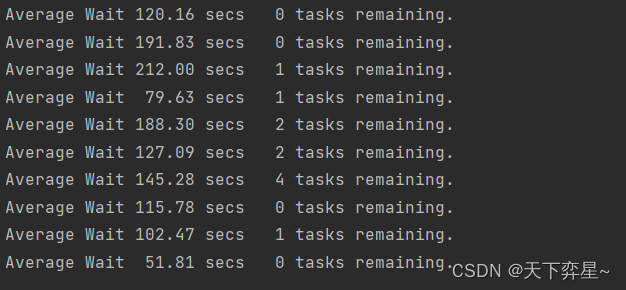
目录 一、何谓队列 二、队列抽象数据类型 三、用Python实现队列 四、模拟:传土豆 五、模拟:打印任务 5.1 主要模拟步骤 5.2 Python实现 一、何谓队列 队列是有序集合,添加操作发生在“尾部”,移除操作则发生在“头部”。新…...
)
QT在label上透明绘图(二)
前面步骤参考前一篇文章 QT在label上透明绘图 一、给TransparentLabel类添加double transparency;变量, 二、ui添加doublespinbox,调整透明参数 void MainWindow::on_doubleSpinBox_valueChanged(double arg1) {transparentLabel->transparencyarg1;…...
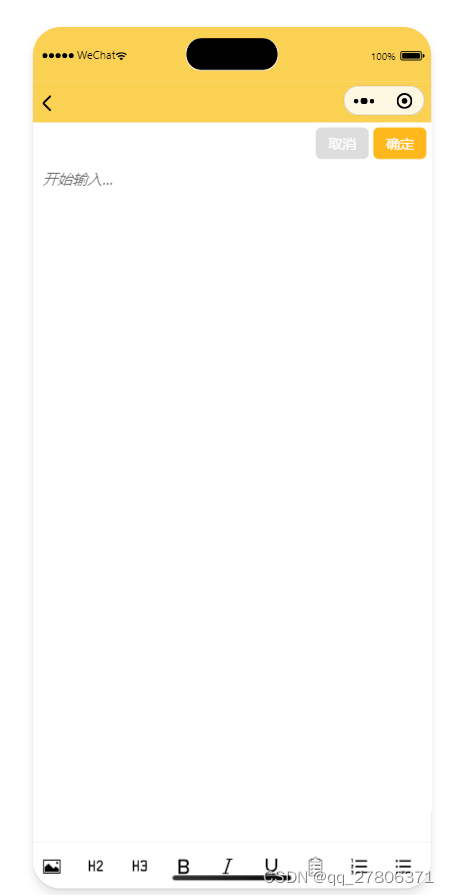
微信小程序使用editor富文本编辑器 以及回显 全屏弹窗的模式
<!--富文本接收的位置--><view class"white-box"><view class"title"><view class"yellow-fence"></view><view class"v1">教研记录</view></view><view class"add-btn"…...
)
在CSDN学Golang场景化解决方案(基于gin框架的web开发脚手架)
一,中间件统一实现Oauth2身份验证 在Golang基于Gin框架开发Web应用程序时,可以使用gin-oauth2来实现Oauth2身份验证。下面是简单的步骤: 安装gin-oauth2包:go get github.com/appleboy/gin-oauth2导入依赖:import &q…...
关于Express 5
目录 1、概述 2、Express 5的变化 2.1 弃用或删除内容的列表: app.param(name,fn)名称中的前导冒号(:) app.del() app.param(fn) 复数方法名 res.json࿰…...

ftrace 原理详细分析
》内核新视界文章汇总《 文章目录 ftrace 原理分析1 简介2 ftrace 的编译器支持2.1 HAVE_FUNCTION_TRACER 选项对 ftrace 的支持2.2 HAVE_DYNAMIC_FTRACE 选项对动态 ftrace 的支持 3 ftrace 的初始化4 function trace 流程5 总结 ftrace 原理分析 1 简介 ftrace 是一个内核…...

UWB定位技术和蓝牙AOA有哪些不同?-高精度室内定位技术对比
UWB超宽带定位 UWB(Ultra Wide Band )即超宽带技术,它是一种无载波通信技术,利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。传统的定位技术是根据信号强弱来判别物体位置,信号强弱受外界…...
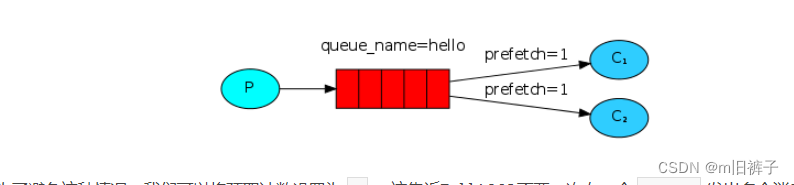
【RabbitMQ】golang客户端教程2——工作队列
任务队列/工作队列 在上一个教程中,我们编写程序从命名的队列发送和接收消息。在这一节中,我们将创建一个工作队列,该队列将用于在多个工人之间分配耗时的任务。 工作队列(又称任务队列)的主要思想是避免立即执行某些…...
芯旺微冲刺IPO,车规级MCU竞争白热化下的“隐忧”凸显
在汽车智能化和电动化发展带来的巨大蓝海市场下,产业链企业迎来了一波IPO小高潮。 日前,上海芯旺微电子技术股份有限公司(以下简称“芯旺微”)在科创板的上市申请已经被上交所受理,拟募资17亿元,用于投建车…...

Unity UGUI轻量UI框架:200行代码实现零GC界面管理
1. 为什么还要自己手写UI框架?——当UGUI原生方案开始“卡脖子”很多人看到这个标题第一反应是:“都2024年了,还手写UI框架?Asset Store里几十个成熟方案,NGUI、FairyGUI、TextMeshPro配套的UI系统一抓一大把ÿ…...

论文创新点像挤牙膏?导师强推这几个AI论文平台
想写论文又快又好,关键是用对 AI 工具、走对流程——资深教授普遍推荐:千笔AI(中文全流程首选) 豆包学术版(轻量高效) DeepSeek 学术版(理工 / 长文本) Grammarly Academicÿ…...

3分钟掌握HashCalculator:你的文件完整性守护专家
3分钟掌握HashCalculator:你的文件完整性守护专家 【免费下载链接】HashCalculator 哈希值计算工具,批量计算/批量校验/查找重复文件/改变哈希值等,支持集成到系统右键菜单 项目地址: https://gitcode.com/gh_mirrors/ha/HashCalculator …...

千亿镁合金产业集群正在成形:成都、抚州、池州的新版图
一个新赛道的地理坐标 如果要在中国地图上标注一条正在成形的新兴产业集群走廊,高强镁合金这条线,值得被认真画出来。 成都龙泉驿——江西抚州临川——安徽池州高新区,三个坐标,三条生产线,一家公司,两年内…...

高精度光照检测
光线检测仪,kotlin开发,调用手机感光模块检测室内外光照强度,用途多多,我主要用途孩子写作业检测光照保护视力。 食用方法∶打开即测,速度快,无广告,手机平视即可,无须直视光线。 买…...

JWT弱密钥爆破实战:从HS256签名原理到CTF权限提升
1. 这不是密码学考试,而是一场“密钥猜谜”实战JWT(JSON Web Token)在现代Web系统中早已不是可选项,而是默认配置。登录成功后返回一串形如eyJhbGciOiJIUzI1NiIsInR5cCI6IkpXVCJ9.eyJ1c2VyX2lkIjoxMjMsIm5hbWUiOiLnlKjliYkiLCJpYX…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...

国内大学生常用的AI写作辅助平台有哪些?
国内高校学生常用的 AI 写作辅助平台,以本土化全流程工具为主,结合通用大模型与专项功能模块,覆盖选题构思、大纲搭建、初稿撰写、语言润色、降重处理、查重检测及格式排版等关键环节,以下是主流平台详解与对比: 一、本…...
)
别再瞎拖拽了!Unity Prefab从创建到批量修改的保姆级工作流(含变体与嵌套实战)
Unity Prefab高效工作流:从创建到批量修改的实战指南在Unity项目开发中,Prefab(预制体)是最基础也最强大的工具之一。但很多开发者,尤其是初学者,往往停留在简单的"拖拽-修改"阶段,没…...
)
保姆级教程:手把手教你为ESXi 6.7配置主板BIOS(VT-x/VT-d/AES全开)
从零开始:ESXi 6.7主板BIOS设置完全指南当你第一次接触企业级虚拟化平台时,那种既兴奋又忐忑的心情我完全理解。作为过来人,我清楚地记得自己第一次为ESXi配置BIOS时的迷茫——那些专业术语像天书一样,生怕设置错误导致服务器无法…...