python: lidar点云转BEV投影及pillar/voxel
点云BEV投影及pillar体素化
- bev投影
- pillar/voxel
bev投影
点云bev投影代码
pillar/voxel
#!/usr/bin/env python
# -*- encoding: utf-8 -*-import os
import numpy as np
import mathn_max_points_per_pillar = 32
n_max_pillars = 20736 # 144*144 = 20736
n_in_features = 7 # x y z i xc yc zcx_step = 0.32 # 32cm 32*144 = 4608 = 46.08m
y_step = 0.16 # 16cm 16*144 = = 15.36mmax_intensity = 255def read_pcd(pcd_file, readline=11):# np.fromfile read pcd 文本/二进制# cloud = np.fromfile(str(pcd_file), dtype=np.float32, count=-1)data = []with open(pcd_file, 'r') as f:lines = f.readlines()[readline:] for line in lines:line = np.array(line.strip('\n').split(' '), dtype=np.float32)# print(line.shape, line)x,y,z,i = line[0], line[1], line[2], line[3]# print(x,y,z,i)# r = math.sqrt(x**2 + y**2 + z**2) * i # for rslidar# r = float(line[4]) # for ouster lidar data.append([x,y,z,i])# points = list(map(lambda line: list(map(lambda x: float(x), line.split(' '))), lines))points = np.array(data)return pointsdef points_to_pillars(points, list_roi_xyz = [0.0, 69.12, -11.52, 11.52, -2.5, 0.5],list_pillar_xy = [0.48, 0.16],list_grid_xy = [144, 144], # (69.12 - 0) / 0.48list_pillar_szie = [20736, 32, 7]):x_min, x_max, y_min, y_max, z_min, z_max = list_roi_xyzx_grid, y_grid = list_grid_xyx_pillar, y_pillar = list_pillar_xyn_max_pillars, n_max_points_per_pillar, n_in_features = list_pillar_szie# ROIidx = np.where((points[:, 0] > x_min) & (points[:, 0] < x_max) &(points[:, 1] > y_min) & (points[:, 1] < y_max) &(points[:, 2] > z_min) & (points[:, 2] < z_max))points_roi = points[idx[0]]# intensity normlizepoints_roi[:,3] /= 255# 计算每个点所在的voxel索引# Compute the indices of the pillars that each point belongs to.x_img = (points_roi[:,0] - x_min) // x_pillary_img = (points_roi[:,1] - y_min) // y_pillarx_img = x_img.reshape(-1, 1).astype(int)y_img = y_img.reshape(-1, 1).astype(int)# pillar_coords = np.concatenate((x_img, y_img), axis=1)# 计算pillar的索引pillar_idx = x_img * y_grid + y_img # 找到每个pillar的点数unique_pillars, num_points_per_pillars = np.unique(pillar_idx, return_counts=True)# print("num pillars: ",unique_pillars, num_points_per_pillars)num_points_per_pillars = np.minimum(num_points_per_pillars, n_max_points_per_pillar)# Initialize the pillar representation with zeros.pillars = np.zeros([n_max_pillars, n_max_points_per_pillar, n_in_features]).astype(np.float32)for i, pillar_id in enumerate(unique_pillars):# 找出pillar对应的点indices = np.where(pillar_idx == pillar_id)[0] # 每个pillar内所有点的索引indices = indices[:num_points_per_pillars[i]] # 每个pillar内取前n个点的索引# 计算pillar的中心坐标pillar_c = np.mean(points_roi[indices, :3], axis=0) # 计算pillar的中心坐标和每个点的偏移offsets = points_roi[indices, :3] - pillar_c# 将点和偏移添加到pillar中pillars[pillar_id, :num_points_per_pillars[i], :4] = points_roi[indices]pillars[pillar_id, :num_points_per_pillars[i], 4:7] = offsetsprint(pillars[pillar_id, ...])if __name__=="__main__":path = "/home/data"for i,f in enumerate(os.listdir(path)):file = os.path.join(path, f)if i < 20:points = read_pcd(file)points_to_pillars(points)相关文章:

python: lidar点云转BEV投影及pillar/voxel
点云BEV投影及pillar体素化 bev投影pillar/voxel bev投影 点云bev投影代码 pillar/voxel #!/usr/bin/env python # -*- encoding: utf-8 -*-import os import numpy as np import mathn_max_points_per_pillar 32 n_max_pillars 20736 # 144*144 20736 n_in_features 7…...

我的创作纪念日2023.8.5
机缘 在CSDN的创作开始于去年,创作的初衷是希望对自己的学习经历进行记录,同时也把自己的经验和收获传递给更多需要的小伙伴。创作博客的过程是一个将输入的知识进行再生产的过程,在此期间,知识获得了沉淀和提纯,思路…...

课程作业-基于Python实现的迷宫搜索游戏附源码
简单介绍一下 该项目不过是一个平平无奇的小作业,基于python3.8开发,目前提供两种迷宫生成算法与三种迷宫求解算法,希望对大家的学习有所帮助。 项目如果有后续的跟进将会声明,目前就这样吧~ 效果图如下所示: 环境…...
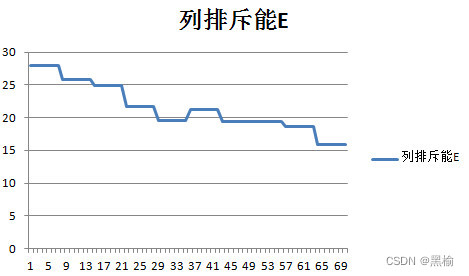
差值结构的相互作用能
( A, B )---3*30*2---( 1, 0 )( 0, 1 ) 让网络的输入只有3个节点,AB训练集各由6张二值化的图片组成,让A,B中各有3个点,且不重合,统计迭代次数并排序。 其中有10组数据 差值结构 A-B 迭代次数 构造平均列 平均列…...

UI、UE、UX的区别
UI、UE、UX的区别 大部分程序员可能对UI、UE、UX这几个概念不是很熟悉,但在整个项目周期里,这些岗位还是很重要的,特别是对于产品公司,这些岗位对于一个产品是否能成功起着关键的作用。老规矩,我们先看看这三个缩写的定义。 UI:是User Interface英文的缩写,即用户界面的…...

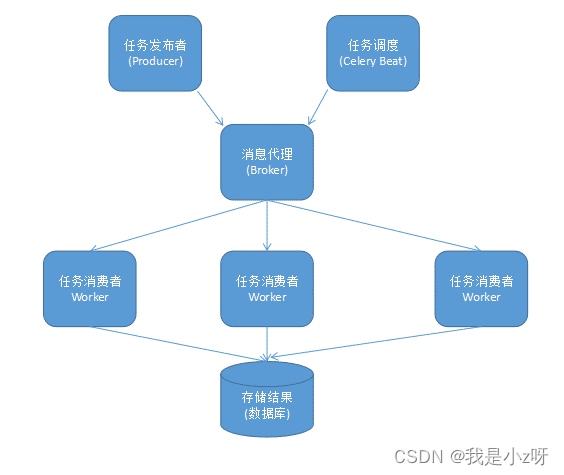
RabbitMQ 教程 | 第10章 网络分区
👨🏻💻 热爱摄影的程序员 👨🏻🎨 喜欢编码的设计师 🧕🏻 擅长设计的剪辑师 🧑🏻🏫 一位高冷无情的编码爱好者 大家好,我是 DevO…...
Flask学习笔记_异步论坛(四)
Flask学习笔记_异步论坛(四) 1.配置和数据库链接1.exts.py里面实例化sqlalchemy数据库2.config.py配置app和数据库信息3.app.py导入exts和config并初始化到app上 2.创建用户模型并映射到数据库1.models/auth.py创建用户模型2.app.py导入模型并用flask-mi…...

K8S系列文章之 kubeasz部署K8S环境
自动化安装方式(kubeasz)* 生产环境推荐(首次安装下载相关配置和安装包)是基于Ansible实现的部署工具 简单介绍 每一具体k8s集群的详细配置参数文件 Ansible 任务配置文件 镜像安装包 安装部署步骤 前提 : 保证Ansib…...

nodejs和vue的关系--vue3教程
文章目录 总结性nodejs和vue的关系nodejs和vue产生关系的周边nodejs和vue的区别 总结性 vue是一套用于构建用户界面的前端框架,如果web项目中有前后端分离,前端项目想单独运行在服务器端,那么就要依赖nodeJs。 Vue的配套周边会和Node.js产生…...

前端大屏尺寸实现自适应屏幕大小
说在前面 目前很多业主在使用系统的时候都会有大屏的需求,很多屏幕并不会像我们开发的屏幕一样标准,比如1920*1080,这样我们就需要根据业主的屏幕尺寸进行适配,避免一些图表或文字在大屏中出现偏移,影响视觉观感。 方…...

leetcode 416. 分割等和子集
给你一个 只包含正整数 的 非空 数组 nums 。请你判断是否可以将这个数组分割成两个子集,使得两个子集的元素和相等。 示例 1: 输入:nums [1,5,11,5] 输出:true 解释:数组可以分割成 [1, 5, 5] 和 [11] 。 示例 2&a…...

cesium加载三维模型3dtiles
1.将数据和代码放到一个目录下 目的:为避免跨域 输入cmd命令 python3 -m http.server 5500 2.三维服务地址 http://127.0.0.1:5500/data/mars3d-max-shihua-3dtiles-master/tileset.json 3.模型网页地址 http://127.0.0.1:5500/cesium/cesium%E5%8A%A0%E8%BD%…...

el-select控制单选还是多选
<el-form :inline"true" :model"form" class"demo-form-inline"><el-form-item><el-select v-model"form.properties_id" placeholder"请选择样品性质" clearable :multiple"multiple_properties"…...

nginx使用
1 安装 yum -y install gcc pcre-devel zlib-devel openssl openssl-devel yum install -y wget wget https://nginx.org/download/nginx-1.16.1.tar.gz tar -zxvf nginx-1.16.1.tar.gz cd nginx-1.16.1 ./configure --prefix/usr/local/nginx make make install2 目录 目录说…...

基于Jenkins+Python+Ubuntu+Docker的接口/UI自动化测试环境部署详细过程
基于JenkinsPythonUbuntuDocker的接口/UI自动化测试环境部署详细过程 1 Jenkins是什么?2 Jenkins目标是什么?3 什么是CI/CD?3.1 CI持续集成3.2 CD持续部署3.3 CD持续交付 4 Ubuntu环境4.1 环境需求4.2 实现思路 5 Ubuntu下安装Docker6 安装Jenkins6.1 拉…...
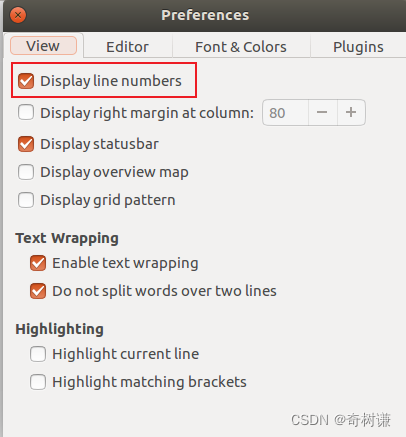
Linux|ubuntu下运行python
参考:ubuntu系统下切换python版本的方法 文章目录 python版本问题查看ubuntu下的所有python版本通过apt-get install可以安装不同版本python查看python版本号更新update-alternatives替代列表查看update-alternatives下的python版本切换python版本删除python版本 p…...
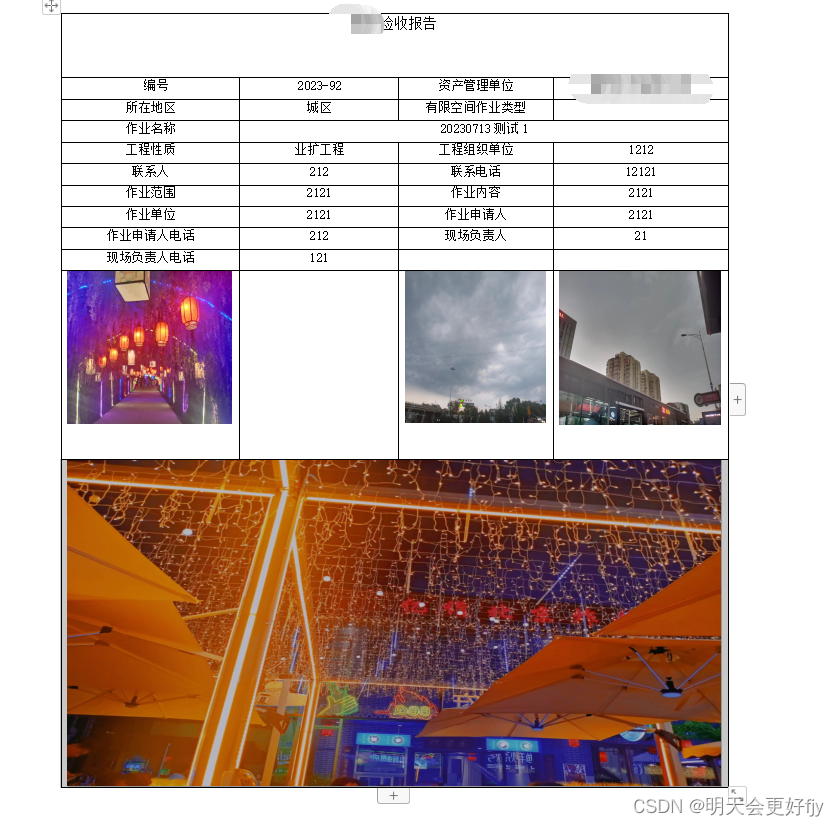
使用FreeMarker导出word文档(支持导出图片)
今天跟大家分享一下工作中比较实用的导出word 带图片的功能。 对于在idea开发中我们需要引入以下依赖: 2.对于eclipse 开发我们需要进入对应的jar包 这个必须放在lib下,同样也需要在当前项目的环境是加入该依赖 需要在MEAT-INF加入 首先制定word 导出…...

C/C++中变量按位操作
一、按位写入1 uint32_t writeBit (1 << 5) // 第5位的掩码 uint32_t value 0x12341234; // 设置第5位为1 value | writeBit;原理就是原值与掩码… 00010000进行按位相与,与0相交的位还是等于原来的值,与1相交的位则变为1。 二、按位写入0…...

uni、css——制作表格样式的模型
案例展示 这里以5列做展示(可随意调节) 案例代码 <view class"list"><view class"item" v-for"(item,index) in list" :key"index">1</view> <!-- 有内容 --><view clas…...
mac前端代码编辑 Sublime Text 4 Dev 中文v4.0(4151)
Sublime Text 4 for Mac是一款功能强大的代码编辑器,适合所有需要高效编写代码和进行代码管理的程序员使用。 快速响应:Sublime Text 4在加载文件和执行命令时非常快速,能够让用户在高效的开发过程中体验到无缝的交互。 多种语言支持&#…...

Fluvio Connectors 终极指南:5步快速构建实时数据管道
Fluvio Connectors 终极指南:5步快速构建实时数据管道 【免费下载链接】fluvio 🦀 event stream processing for developers to collect and transform data in motion to power responsive data intensive applications. 项目地址: https://gitcode.c…...

OpenClaw可视化监控:千问3.5-9B任务实时看板搭建
OpenClaw可视化监控:千问3.5-9B任务实时看板搭建 1. 为什么需要本地可视化监控? 上个月我尝试用OpenClaw自动化处理一批市场分析报告时,突然发现任务执行到一半就中断了。排查了半天才发现是Token耗尽导致模型停止响应——这种"黑盒式…...

基于SpringBoot的高校餐饮档口管理系统
作者:计算机学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等,“文末源码”。 专栏推荐:前后端分离项目源码、SpringBoot项目源码、Vue项目源码、SSM项目源码、微信小程序源码 精品专栏:…...

2026.4.5总结
今天是清明节,祭祖的日子。晚上跟妹妹和姐姐捞了不少家常。聊的是关于上一年自己做过的一些愚蠢事。读书的时候没接触过社会,导致在毕业时,吃了不少亏,也被坑了不少钱。我妹称这叫见世面。确实,刚毕业时,感…...

【Overview Effect】 -在抵达月球之前,让我们最后一次眺望地球
“当我们前往月球时,我们专注于探索月球,但实际上我们发现的是地球。” —— 这种视角让人们意识到,地球不仅是家园,更是一艘在寒冷宇宙中孤立无援的“救生船”。在抵达月球之前,让我们最后一次眺望地球。这张地球照片…...

CSS如何制作透明度渐变的蒙版_使用linear-gradient从黑色过渡到透明
linear-gradient做透明蒙版时背景没变暗,是因为未使用带alpha通道的颜色(如rgba或带透明度的十六进制),而默认颜色如black或#000无透明度,导致渐变失效;必须用rgba(0,0,0,0.8)到rgba(0,0,0,0)等显式透明色&…...

NVIDIA Profile Inspector:解锁显卡潜能的终极配置工具
NVIDIA Profile Inspector:解锁显卡潜能的终极配置工具 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector 作为一款专业的NVIDIA显卡配置工具,NVIDIA Profile Inspector让普通用户也…...

CodeActAgent:以Python代码为通用动作空间,解锁LLM智能体复杂任务处理新范式
1. 为什么Python代码能成为LLM智能体的最佳动作空间? 当你第一次听说"用Python代码作为LLM智能体的动作空间"时,可能会觉得这个想法有点抽象。但想象一下,你正在教一个刚学编程的朋友完成数据分析任务。如果让他用自然语言描述每个…...

医学图像分类与诊断数据集5040张VOC+YOLO
医学图像分类与诊断数据集5040张VOCYOLO数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):5040 标注数量(xml文件个数):5040 标注数…...

Hikyuu性能优化技巧:从AMD 7950x实测看量化平台的极致速度
Hikyuu性能优化技巧:从AMD 7950x实测看量化平台的极致速度 【免费下载链接】hikyuu Hikyuu Quant Framework 基于C/Python的极速开源量化交易研究框架,同时可基于策略部件进行资产重用,快速累积策略资产。 项目地址: https://gitcode.com/g…...