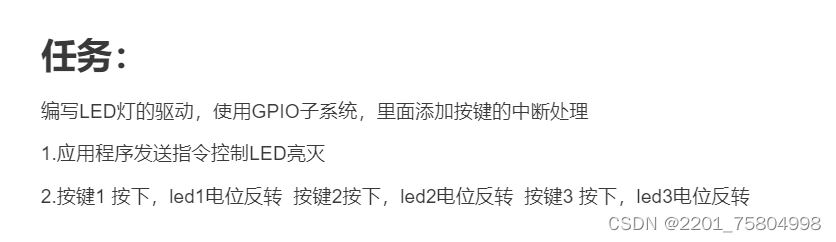
驱动开发(中断)
头文件:
#ifndef __LED_H__
#define __LED_H__#define PHY_LED1_MODER 0X50006000
#define PHY_LED1_ODR 0X50006014
#define PHY_LED1_RCC 0X50000A28#define PHY_LED2_MODER 0X50007000
#define PHY_LED2_ODR 0X50007014
#define PHY_LED2_RCC 0X50000A28#define PHY_LED3_MODER 0X50006000
#define PHY_LED3_ODR 0X50006014
#define PHY_LED3_RCC 0X50000A28
//风扇
#define PHY_FAN_MODER 0X50006000
#define PHY_FAN_ODR 0X50006014
#define PHY_FAN_RCC 0X50000A28
//蜂鸣器
#define PHY_BUZZER_MODER 0X50003000
#define PHY_BUZZER_ODR 0X50003014
#define PHY_BUZZER_RCC 0X50000A28
//马达
#define PHY_MOTOR_MODER 0X50007000
#define PHY_MOTOR_ODR 0X50007014
#define PHY_MOTOR_RCC 0X50000A28
//功能码
#define LED_ON _IO('l',1)
#define LED_OFF _IO('l',0)
#define FAN_ON _IO('f',1)
#define FAN_OFF _IO('f',0)
#define BUZZER_ON _IO('b',1)
#define BUZZER_OFF _IO('b',0)
#define MOTOR_ON _IO('m',1)
#define MOTOR_OFF _IO('m',0)
#endif
应用层程序:
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdlib.h>
#include <string.h>
#include <sys/ioctl.h>
#include "head.h"
int main(int argc, char const *argv[])
{char buf[128] = {0};int led1_fd, led2_fd, led3_fd;// 打开led设备文件led1_fd = open("/dev/mycdev0", O_RDWR);if (led1_fd < 0){printf("打开led1设备文件失败\n");exit(-1);}led2_fd = open("/dev/mycdev1", O_RDWR);if (led2_fd < 0){printf("打开led2设备文件失败\n");exit(-1);}led3_fd = open("/dev/mycdev2", O_RDWR);if (led3_fd < 0){printf("打开led3设备文件失败\n");exit(-1);}int a, b;while (1){printf("请选择要控制的器件: 1(led灯1) 2 (led灯2) 3 (led灯3) ");scanf("%d", &a);printf("请输入指令:0(关闭) 1 (打开)");scanf("%d", &b);switch (b){case 1:switch (a){case 1:ioctl(led1_fd, LED_ON, a);break;case 2:ioctl(led2_fd, LED_ON, a);break;case 3:ioctl(led3_fd, LED_ON, a);break;}break;case 0:switch (a){case 1:ioctl(led1_fd, LED_OFF, a);break;case 2:ioctl(led2_fd, LED_OFF, a);break;case 3:ioctl(led3_fd, LED_OFF, a);break;}break;}}close(led1_fd);close(led2_fd);close(led3_fd);return 0;
}
驱动程序:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/slab.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/poll.h>
#include "head.h"
struct cdev* mycdev;
struct class* cls;
struct device* dev_d;
unsigned int major = 500;
unsigned int minor = 0;
dev_t devno;
char kbuf[128] = {0};
wait_queue_head_t wq_head;
int condition = 0;
struct device_node *dev,*led_dev;
unsigned int irqno1,irqno2,irqno3;
struct gpio_desc* gpiono1,*gpiono2,*gpiono3;
// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{int a = inode->i_rdev;file->private_data = (void *)MINOR(a);printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
long mychrdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{ unsigned int a;printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);a = (unsigned int)file->private_data;switch(a){case 0:if(cmd == LED_ON){gpiod_set_value(gpiono1,1);}else{gpiod_set_value(gpiono1,0);}break;case 1:if(cmd == LED_ON){gpiod_set_value(gpiono2,1);}else{gpiod_set_value(gpiono2,0);}break;case 2:if(cmd == LED_ON){gpiod_set_value(gpiono3,1);}else{gpiod_set_value(gpiono3,0);}break;}return 0;
}
irqreturn_t myirq_handler(int irq,void *dev)
{gpiod_set_value(gpiono1,!gpiod_get_value(gpiono1));return IRQ_HANDLED;
}
irqreturn_t myirq2_handler(int irq,void *dev)
{gpiod_set_value(gpiono2,!gpiod_get_value(gpiono2));return IRQ_HANDLED;
}
irqreturn_t myirq3_handler(int irq,void *dev)
{gpiod_set_value(gpiono3,!gpiod_get_value(gpiono3));return IRQ_HANDLED;
}
//对设备文件进行操作的结构体
struct file_operations fops = {.open = mycdev_open,//打开.unlocked_ioctl = mychrdev_ioctl,//硬件功能的选择.release = mycdev_close,//关闭
};
static int __init mycdev_init(void)
{int i;major = register_chrdev(0,"mycdev",&fops);if(major<0){printk("注册设备驱动失败\n");return major;}printk("注册设备驱动成功major=%d\n",major);//************自动申请设备节点*********************//1、向上提交目录cls = class_create(THIS_MODULE, "mycdev");if(IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");// 2、向上提交设备节点信息for (i = 0; i < 3; i++){dev_d = device_create(cls, NULL, MKDEV(major, i), NULL, "mycdev%d", i);if (IS_ERR(dev_d)){printk("提交led设备信息失败\n");return -PTR_ERR(dev_d);}}printk("提交设备信息成功\n");/***********************************///解析设备树的节点int ret;dev = of_find_node_by_name(NULL,"myirq");if(dev == NULL){printk("解析设备树节点失败\n");return -EIO;}printk("解析myirq设备树节点成功\n");led_dev = of_find_node_by_name(NULL,"leds");if(led_dev == NULL){printk("解析led设备树节点失败\n");return -EIO;}printk("解析led设备树节点成功\n");gpiono1 = gpiod_get_from_of_node(led_dev,"led1-gpios",0,GPIOD_OUT_LOW,NULL);if(IS_ERR(gpiono1)){printk("申请gpio对象失败\n");return -PTR_ERR(gpiono1);}gpiono2 = gpiod_get_from_of_node(led_dev,"led2-gpios",0,GPIOD_OUT_LOW,NULL);if(IS_ERR(gpiono2)){printk("申请gpio2对象失败\n");return -PTR_ERR(gpiono2);}gpiono3 = gpiod_get_from_of_node(led_dev,"led3-gpios",0,GPIOD_OUT_LOW,NULL);if(IS_ERR(gpiono3)){printk("申请gpio3对象失败\n");return -PTR_ERR(gpiono3);}//根据设备树节点解析出软中断号irqno1 = irq_of_parse_and_map(dev,0);if(!irqno1){printk("解析led1软中断号失败\n");return -ENXIO;}printk("解析软led1中断号成功irqno=%d\n",irqno1);irqno2 = irq_of_parse_and_map(dev,1);if(!irqno2){printk("解析led2软中断号失败\n");return -ENXIO;}printk("解析led2软中断号成功irqno=%d\n",irqno2);irqno3 = irq_of_parse_and_map(dev,2);if(!irqno3){printk("解析led3软中断号失败\n");return -ENXIO;}printk("解析led3软中断号成功irqno=%d\n",irqno3);//注册中断ret = request_irq(irqno1,myirq_handler,IRQF_TRIGGER_FALLING,"key1",NULL);if(ret){printk("key1软中断号注册失败\n");return ret;}printk("key1软中断号注册成功\n");ret = request_irq(irqno2,myirq2_handler,IRQF_TRIGGER_FALLING,"key2",NULL);if(ret){printk("key2软中断号注册失败\n");return ret;}printk("key2软中断号注册成功\n");ret = request_irq(irqno3,myirq3_handler,IRQF_TRIGGER_FALLING,"key3",NULL);if(ret){printk("key3软中断号注册失败\n");return ret;}printk("key3软中断号注册成功\n");return 0;
}
static void __exit mycdev_exit(void)
{int i;//灭灯gpiod_set_value(gpiono1,0);//释放gpio编号gpiod_put(gpiono1);//灭灯gpiod_set_value(gpiono2,0);//释放gpio编号gpiod_put(gpiono2);//灭灯gpiod_set_value(gpiono3,0);//释放gpio编号gpiod_put(gpiono3);//注销中断号free_irq(irqno1,NULL);free_irq(irqno2,NULL);free_irq(irqno3,NULL);//销毁节点信息for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}//销毁目录信息class_destroy(cls);//注销字符设备驱动unregister_chrdev(major,"mycdev");}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");相关文章:
驱动开发(中断)
头文件: #ifndef __LED_H__ #define __LED_H__#define PHY_LED1_MODER 0X50006000 #define PHY_LED1_ODR 0X50006014 #define PHY_LED1_RCC 0X50000A28#define PHY_LED2_MODER 0X50007000 #define PHY_LED2_ODR 0X50007014 #define PHY_LED2_RCC 0X50000A28#def…...

TypeScript最新语法总结
注意注意!!!本文介绍的是最新的TypeScript4的重要语法 第一部分:TypeScript的简介 TypeScript 是由微软开发的一款开源的编程语言,TypeScript 是 Javascript 的超集,遵循最新的 ES6、ES5 规范,…...
sentinel组件
目录 定义 4.加SentinelResource,blockHander是超过阈值之后执行的函数 5.设置阈值 6.springboot集成sentinel 定义 1.sentinel知道当前流量大小,在浏览器和后端之间加sentinel控制流量,避免大批量的瞬时请求都达到服务上,将服务压垮 2.…...
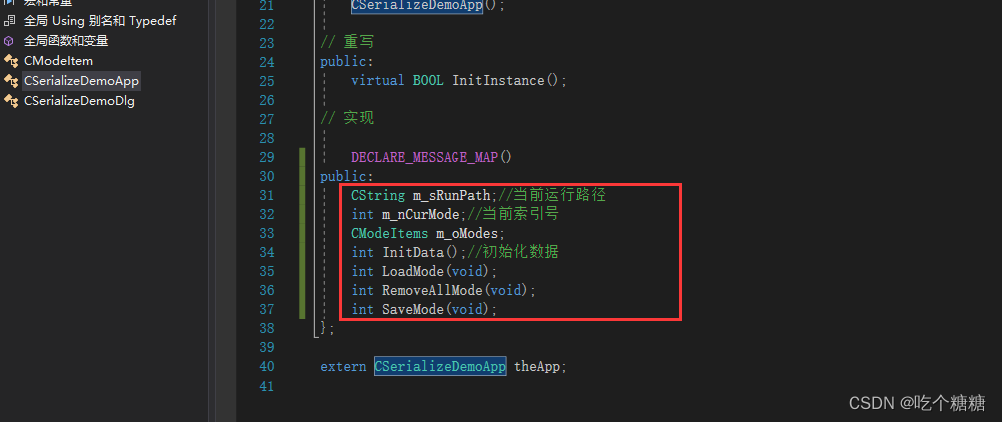
26 MFC序列化函数
文章目录 Serialize对于存储文件的序列化 Serialize Serialize 是一个在 MFC (Microsoft Foundation Classes) 中常用的函数或概念。它用于将对象的数据进行序列化和反序列化,便于在不同的场景中保存、传输和恢复对象的状态。 在 MFC 中,Serialize 函数…...
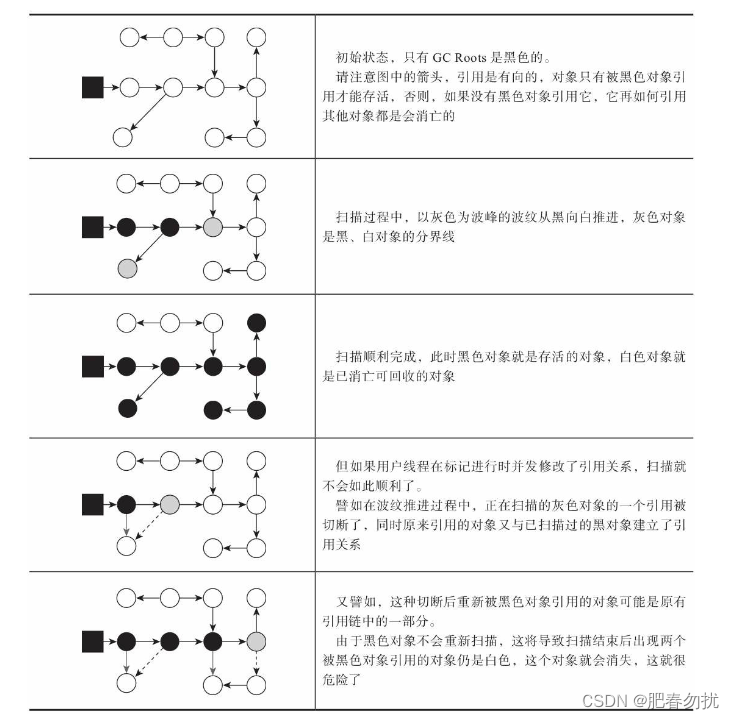
GC 深入(小白,对gc有一个进一步的了解)
垃圾回收器的搭配 一般固定 一般这年轻代垃圾回收器,老年代垃圾回收器,如上图搭配着使用 1.8呢默认就是最后边那哥俩 jvm调优 一个就是增加吞吐量 一个就是减少STW的时间。 三色标记算法(理解根可达算法) 并发的可达性分析 有…...

CSS前端面试
文章目录 rem、em、vh、px各自代表的含义?盒模型poison 定位属性flex属性让元素水平垂直居中页面适配的方法有哪些 rem、em、vh、px各自代表的含义? px:绝对单位,页面按精确像素展示 em:相对单位,基准点为…...

VB+SQL餐饮管理系统设计与实现
第一章 前言 1.1 绪论 当今世界已进入了在计算机信息管理领域中激烈竞争的时代,应用计算机已经变得十分普遍了,如同我们离不开的自行车、汽车一样。我们应该承认,谁掌握的知识多,信息量大,信息处理速度快,批量大,谁的效率就高,谁就能够在各种竞争中立于不败之地。随着…...
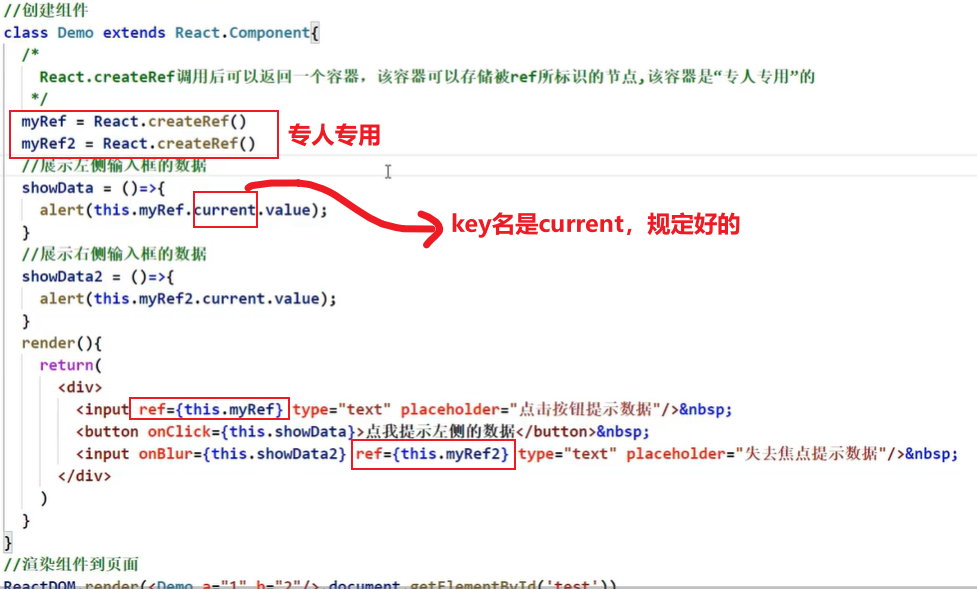
React入门学习笔记2
jsx语法规则 定义虚拟DOM时,不要写引号。标签中混入JS表达式时要用{ }。样式的类名指定不要用class,要用className。内联样式,要用style{{key:value}}的形式去写。只有一个根标签标签必须闭合标签首字母 )若小写字母开头…...
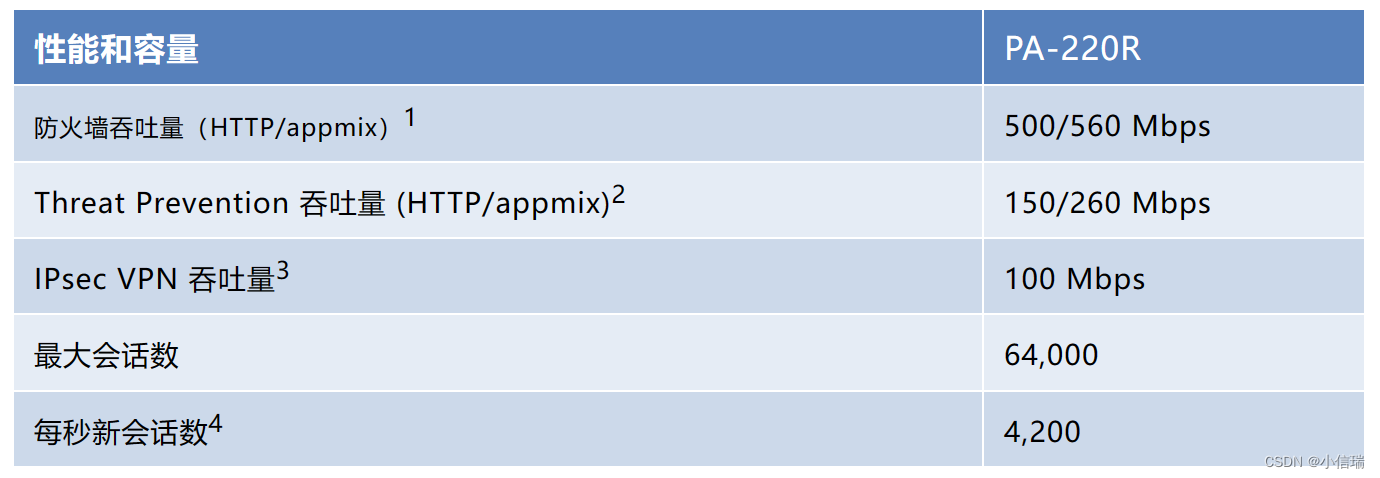
Palo Alto Networks® PA-220R 下一代防火墙 确保恶劣工况下的网络安全
一、主要安全功能 1、每时每刻在各端口对全部应用进行分类 • 将 App-ID 用于工业协议和应用,例如 Modbus、 DNP3、IEC 60870-5-104、Siemens S7、OSIsoft PI 等。 • 不论采用何种端口、SSL/SSH 加密或者其他规避技术,都会识别应用。 • 使用…...
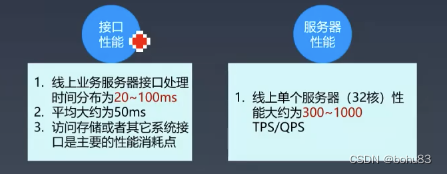
架构训练营学习笔记:5-2 负载均衡架构
多级负载架构 设计关键点 性能需求、维护复杂度之间做取舍。 一可以去掉F5、LVS : F5 是成本较高,LVS 是复杂,对于性能没那么高需求,可以去掉。 二 去掉ng: 服务网关服务 适应于初创公司快速验证,内部的 小系统…...
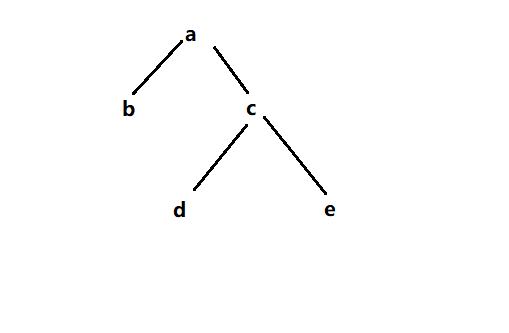
二叉树的性质、前中后序遍历【详细】
1. 树概念2.二叉树的概念1.2二叉树的性质 3.二叉树遍历3.2前序遍历3.2 中序遍历3.3 后序遍历 1. 树概念 树是一种非线性的数据结构,它是由n(n>0)个有限结点组成一个具有层次关系的集合,有二叉树,N叉树等等。 子树…...

涨姿势了,有意思的气泡 Loading 效果
今日,群友提问,如何实现这么一个 Loading 效果: 这个确实有点意思,但是这是 CSS 能够完成的? 没错,这个效果中的核心气泡效果,其实借助 CSS 中的滤镜,能够比较轻松的实现࿰…...
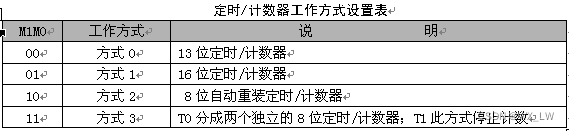
单片机中断系统
单片机中断系统 中断的概念: CPU在处理某一事件A时,发生了另一事件B请求CPU迅速去处理(中断发生);CPU暂时中断当前的工作,转去处理事件B(中断响应和中断服务);待CPU将事…...
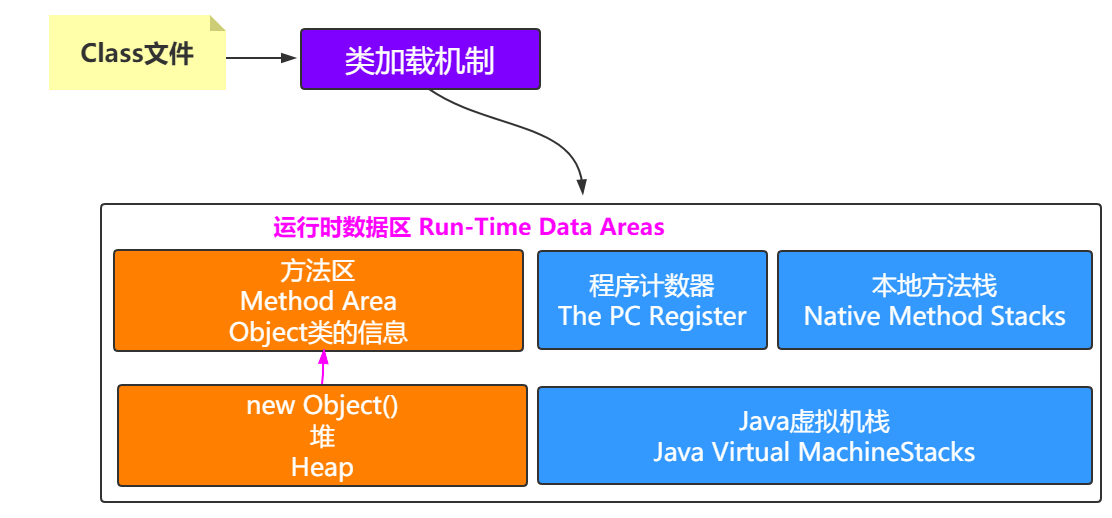
二、JVM-深入运行时数据区
深入运行时数据区 计算机体系结构 JVM的设计实际上遵循了遵循冯诺依曼计算机结构 CPU与内存交互图: 硬件一致性协议: MSI、MESI、MOSI、Synapse、Firely、DragonProtocol 摩尔定律 摩尔定律是由英特尔(Intel)创始人之一戈登摩尔(Gordon Moore)提出来…...

随机验证码vue实现,登录验证码随机验证码数字和字母类型的
1、组件 <!--loginCode登录验证码组件--> <template> <canvas id"canvasCode" :width"contentWidth" :height"contentHeight" /> </template> <script> export default { name: LoginCode, props: { identif…...
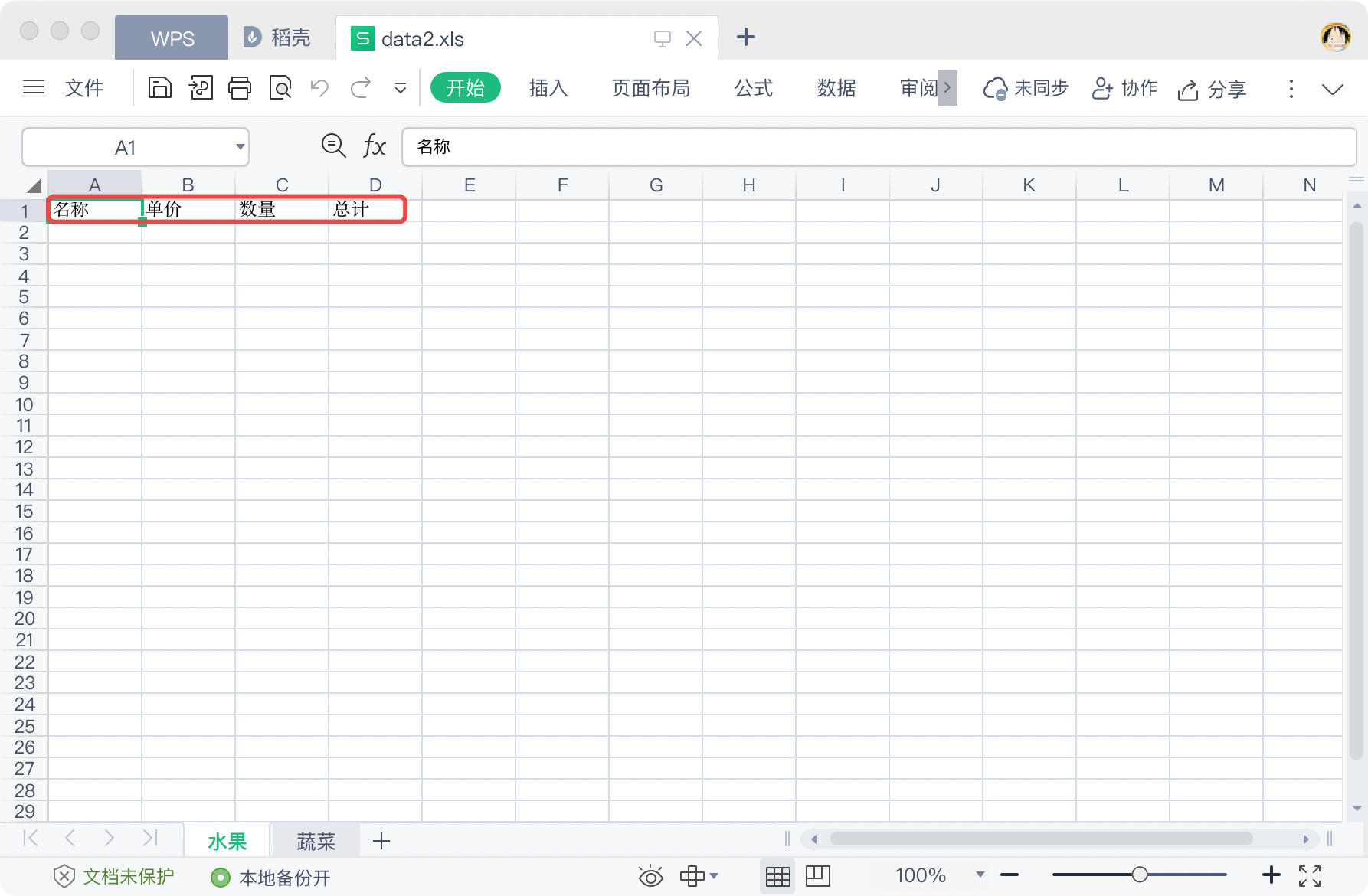
xlrd与xlwt操作Excel文件详解
Python操作Excel的模块有很多,并且各有优劣,不同模块支持的操作和文件类型也有不同。下面是各个模块的支持情况: .xls.xlsx获取文件内容写入数据修改文件内容保存样式调整插入图片xlrd√√√xlwt√√√√√xlutils√√√√xlwings√√√√√…...
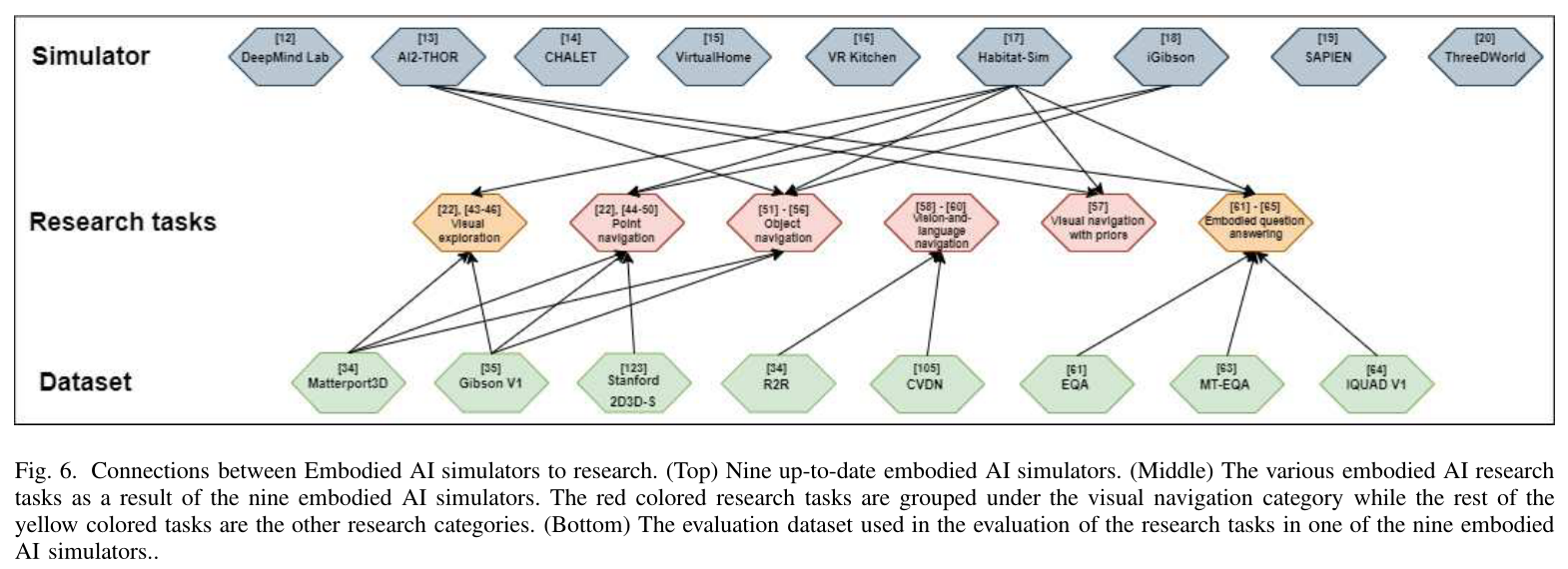
A Survey of Embodied AI: From Simulators to Research Tasks 论文阅读
论文信息: 题目:A Survey of Embodied AI: From Simulators to Research Tasks 作者:Jiafei Duan, Samson Yu 来源:arXiv 时间:2022 Abstract 通过评估当前的九个具体人工智能模拟器与我们提出的七个功能࿰…...
spark-sql数据重复之File Output Committer问题
前言 我们先来回顾下之前介绍过的三种Committer:FileOutputCommitter V1、FileOutputCommitter V2、S3A Committer,其基本代表了整体的演进趋势。 核心代码讲解详细参照:Spark CommitCoordinator 保证数据一致性 OutputCommitter commitTask…...
面试热题(前中序遍历构建树)
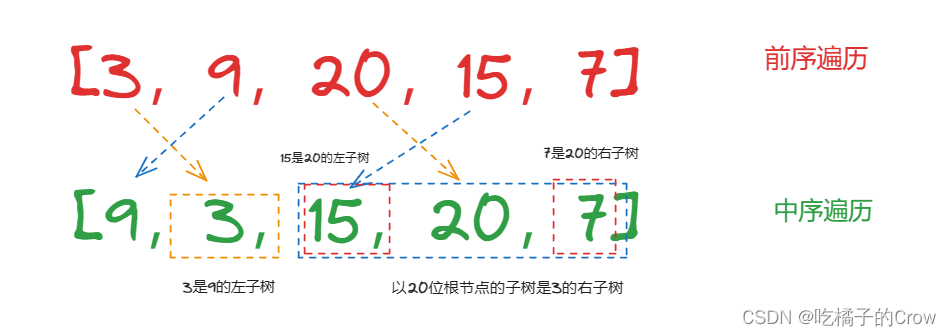
给定两个整数数组 preorder 和 inorder ,其中 preorder 是二叉树的先序遍历, inorder 是同一棵树的中序遍历,请构造二叉树并返回其根节点。 题目中是给定两个数组,一个是存放这颗树的前序遍历的数组,一个是存放这棵树的…...

美术:贴图
游戏模型制作流程,SP和BP根据情况来选择软件对UV进行处理 3Dmax 制作模型和动画(橘肉)RizomUV 对模型进行展UV(橘皮)Substance Painter 纹理手绘(给橘皮制定想要的皮肤)BodyPaint 3D 纹理手绘&a…...

Win11Debloat:让你的Windows系统告别臃肿,重获极速体验的完整指南
Win11Debloat:让你的Windows系统告别臃肿,重获极速体验的完整指南 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other chang…...

企业微信SCRM与客户管理系统推荐:2026年这12家值得关注
2026年,一个企业要选客户管理系统,第一个要回答的问题是:你的客户在哪里?如果答案是"微信",那企业微信SCRM就是最直接的路径——而在这个领域,微盛企微管家作为企业微信最大ISV,服务了…...

OpenAI 模型攻克离散几何 80 年难题:Erdős 单位距离猜想被 AI 证明
OpenAI 模型攻克离散几何 80 年难题:Erdős 单位距离猜想被 AI 证明 一场改写数学史的AI突破 2026年5月20日,OpenAI 宣布其内部通用推理模型成功证明了一个困扰数学界近80年的开放问题——Erdős 单位距离问题(Unit Distance Problem&#…...

YetiForceCRM社区与支持:如何获得帮助并参与开源贡献
YetiForceCRM社区与支持:如何获得帮助并参与开源贡献 【免费下载链接】YetiForceCRM Weve moved! For more information, visit https://github.com/YetiForceCompany/YetiForce 项目地址: https://gitcode.com/gh_mirrors/ye/YetiForceCRM YetiForceCRM是一…...
:PsFile——远程“谁在占用这个文件/共享”的取证与解占用)
《Windows Sysinternals实战指南》PsTools 学习笔记(7.10):PsFile——远程“谁在占用这个文件/共享”的取证与解占用
🔥个人主页:杨利杰YJlio❄️个人专栏:《Sysinternals实战教程》《Windows PowerShell 实战》《WINDOWS教程》《IOS教程》《微信助手》《锤子助手》 《Python》 《Kali Linux》 《那些年未解决的Windows疑难杂症》🌟 让复杂的事情更…...

模型替换易,工作流锁定难!AI 锁定效应转移,企业决策何去何从?
模型替换易,工作流锁定难模型替换正变得越来越容易,但围绕模型的操作、集成和治理机制却难以更换。近日,普华永道(PwC)宣布为 3 万名员工提供有关 Anthropic 公司 Claude 模型的培训和认证,并围绕该模型为银…...

B站SEO优化底层逻辑:以用户需求为核心,解锁低成本流量密码
在B站流量竞争日趋激烈的当下,很多创作者陷入“唯算法论”的误区,过度纠结于完播率、互动量等数据,却忽略了SEO优化的本质——匹配用户搜索需求。 一、认知重构:B站SEO的本质是“用户需求匹配”,而非“算法博弈”多数创…...

影刀RPA跨境店群自动化实战:Python协同Chromium打破风控「垄断」的高并发调度系统架构
定了。彻底打破传统商业指纹浏览器的生态「垄断」与电商巨头风控体系的「底层封锁」,我们用一套完全“自主可控”的、基于 Python 深度协同的分布式微服务调度架构,重塑了跨境千店矩阵的自动化底座。 这几天,科技圈被“DeepSeek V4 首发华为…...

Seaborn可视化从入门到精通:风格设置、调色板与常用图表详解
Seaborn可视化 Seaborn的介绍 简介 Seaborn 是以 matplotlib为底层,更容易定制化作图的Python库。官网http://seaborn.pydata.org/ Seaborn其实是在matplotlib的基础上进行了更高级的API封装,从而使得作图更加容易。在大多数情况下使用Seabo…...

Swift底层多线程:POSIX线程封装与安全并发实践
1. 项目概述:当Swift遇见POSIX线程如果你在Swift里用过DispatchQueue或者Thread,有没有想过它们背后到底是怎么运作的?特别是当你的应用需要处理高并发、低延迟的任务,或者需要在Linux服务器上跑一个Swift后端服务时,仅…...