【Apollo学习笔记】—— 相机仿真

文章目录
- 前言
- 相关代码整理
- 测试实践
- 文件目录
- 包管理BUILD文件以及cyberfile.xml文件
- 源程序
- BUILD
- 运行
- 结果
- 其他参考
- Camera
- Output channels
- 启动camera驱动
- 启动camera + video compression驱动
前言
本文是对Cyber RT的学习记录,文章可能存在不严谨、不完善、有缺漏的部分,还请大家多多指出。这一章的内容还是比较简单的,直接上代码与结果。
课程地址: https://apollo.baidu.com/community/course/outline/329?activeId=10200
更多还请参考:
[1] Apollo星火计划学习笔记——第三讲(Apollo Cyber RT 模块详解与实战)https://blog.csdn.net/sinat_52032317/article/details/126924375
[2] 【Apollo星火计划】—— Cyber基础概念|通信机制
https://blog.csdn.net/sinat_52032317/article/details/131878429?spm=1001.2014.3001.5501
[3] 第一章:Cyber RT基础入门与实践https://apollo.baidu.com/community/article/1093
[4] 第二章:Cyber RT通信机制解析与实践https://apollo.baidu.com/community/article/1094
[5] 第三章:Component组件认知与实践https://apollo.baidu.com/community/article/1103
[6] 第四章:Cyber RT之调度简介与实践https://apollo.baidu.com/community/article/1106
[7] 第五章:使用Cyber RT进行相机仿真https://apollo.baidu.com/community/article/1105相关代码整理
链接: https://pan.baidu.com/s/1ENgXE4yQ1v4nJRjcfZtd8w?pwd=ht4c 提取码: ht4c
测试实践
文件目录
参考以下文件目录进行
camera_demo
|-- driver|-- camera_sim| |-- BUILD| |-- camera_driver.cc
|--BUILD
|--camera_demo.BUILD
|--cyberfile.xml
包管理BUILD文件以及cyberfile.xml文件
参考之前的文章https://blog.csdn.net/sinat_52032317/article/details/131878429?spm=1001.2014.3001.5501
源程序
camera_driver.cc
/* 需求: 发布摄像头仿真数据。实现:1.头文件;2.初始化 cyber 框架;3.创建节点;4.创建发布者;5.组织数据并发布;6.等待关闭。
*/
#include "cyber/cyber.h"
#include "modules/common_msgs/sensor_msgs/sensor_image.pb.h"using apollo::drivers::Image;int main(int argc, char *argv[])
{apollo::cyber::Init(argv[0]);// 3.创建节点;auto talker_node = apollo::cyber::CreateNode("camear_sim_node");// 4.创建发布者;auto talker = talker_node->CreateWriter<Image>("/image_sim");// 5.组织数据并发布;size_t width = 500;size_t height = 350;size_t cell = 50; // 单元格宽度size_t step = width * 3; // 一行像素数char black = 200;char white = 10;apollo::cyber::Rate rate(10.0);while (apollo::cyber::OK()){// 组织数据auto msg = std::make_shared<Image>();msg->set_frame_id("camera");auto now = apollo::cyber::Time::Now();msg->set_measurement_time(now.ToSecond());msg->set_width(width);msg->set_height(height);msg->set_encoding("rgb8");msg->set_step(msg->width() * 3); // 一图片行的元素个数size_t length = msg->width() * msg->height() * 3;char value[length]; for (size_t i = 0; i < height; i++){ // 遍历像素行for (size_t j = 0; j < step; j++){ // 遍历列// 当前字节索引 value[i * step + j]int index = i * step + j;// 行赋值if (i / cell % 2 == 0){ // 偶数行value[index] = black;} else {value[index] = white;}// 列赋值// 偶数列,无需更改if (j / 3 / cell % 2 == 1) {// 奇数列,取反value[index] = value[index] == white ? black : white;}}}msg->set_data(value);//发布talker->Write(msg);rate.Sleep();}// 6.等待关闭。apollo::cyber::WaitForShutdown();return 0;
}
BUILD
load("@rules_cc//cc:defs.bzl", "cc_binary", "cc_library")
load("//tools/install:install.bzl", "install", "install_src_files")
load("//tools:cpplint.bzl", "cpplint")
package(default_visibility = ["//visibility:public"])cc_binary(name = "camera_driver",srcs = ["camera_driver.cc"],deps = ["//cyber","//modules/common_msgs/sensor_msgs:sensor_image_cc_proto",],
)install(name = "install",runtime_dest = "camera_demo/bin",targets = [":camera_driver"],
)install_src_files(name = "install_src",src_dir = ["."],dest = "camera_demo/src/cyberatest",filter = "*",
)
记得修改包管理BUILD中的deps
运行
./bazel-bin/test/test_camera/camera_driver
另开一个终端打开DreamView
aem bootstrap start
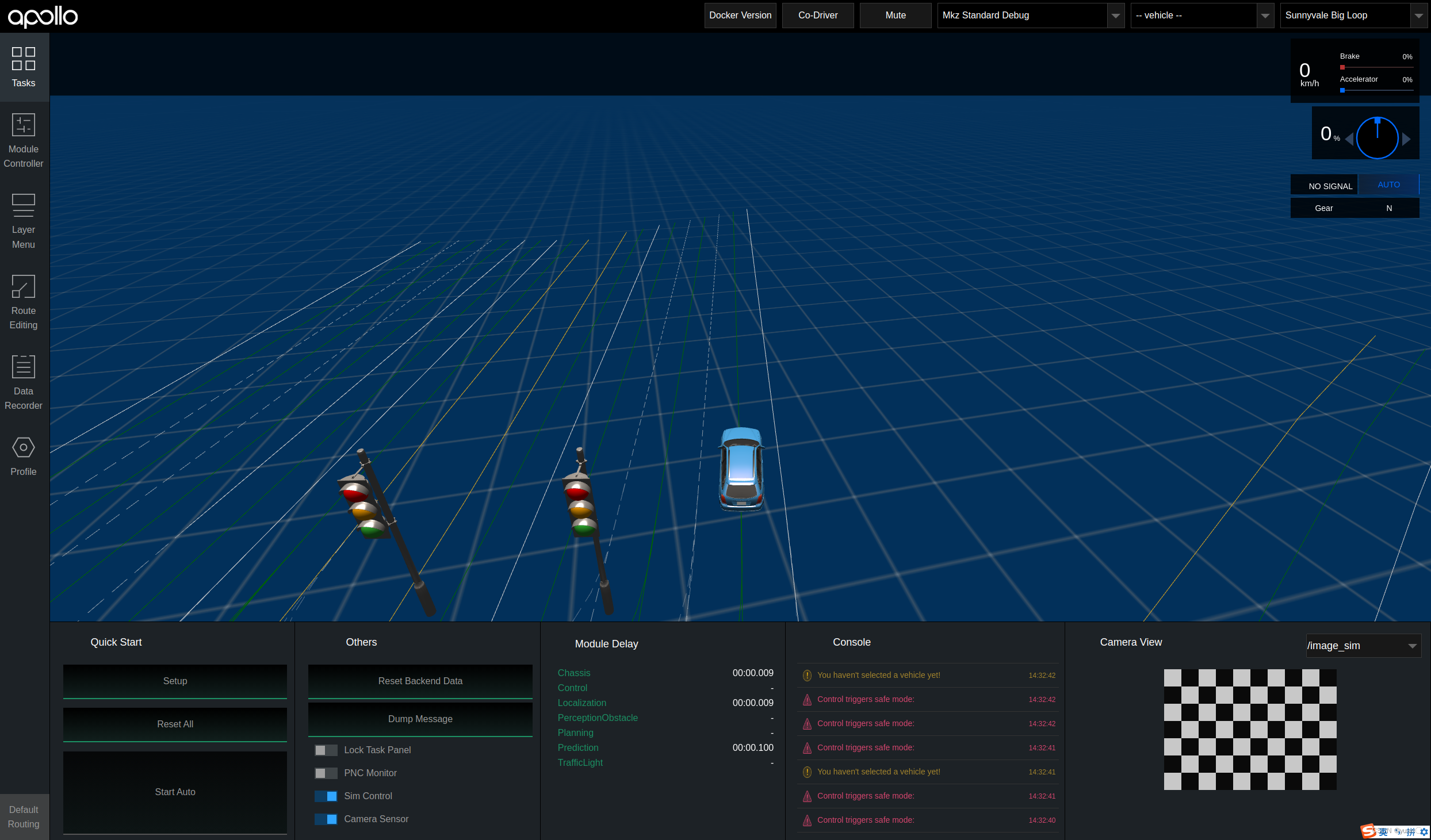
选定合适的camera channel
结果
其他参考
apollo相机驱动在modules/drivers/camera文件目录下,需要设置好相应的配置文件,才能进行正常驱动。下面贴出文档中的README部分
Camera
camera包是基于V4L USB相机设备实现封装,提供图像采集及发布的功能。本驱动中使用了一台长焦相机和一台短焦相机。
Output channels
- /apollo/sensor/camera/front_12mm/image
- /apollo/sensor/camera/front_6mm/image
- /apollo/sensor/camera/front_fisheye/image
- /apollo/sensor/camera/left_fisheye/image
- /apollo/sensor/camera/right_fisheye/image
- /apollo/sensor/camera/rear_6mm/image
启动camera驱动
请先修改并确认launch文件中的参数与实际车辆相对应
# in docker
bash /apollo/scripts/camera.sh
# or
cd /apollo && cyber_launch start modules/drivers/camera/launch/camera.launch
启动camera + video compression驱动
请先修改并确认launch文件中的参数与实际车辆相对应
# in docker
bash /apollo/scripts/camera_and_video.sh
# or
cd /apollo && cyber_launch start modules/drivers/camera/launch/camera_and_video.launch### 常见问题
1. 如果出现报错“sh: 1: v4l2-ctl: not found”,需要安装v4l2库。```bash
sudo apt-get install v4l-utils
camera 驱动解释可以参考这篇博客Apollo camera驱动分析(二十九)
实践例子可参考自动驾驶开发者说|框架|如何在apollo中添加自己的USB摄像头?
相关文章:
【Apollo学习笔记】—— 相机仿真
文章目录 前言相关代码整理 测试实践文件目录包管理BUILD文件以及cyberfile.xml文件源程序BUILD运行结果其他参考CameraOutput channels启动camera驱动启动camera video compression驱动 前言 本文是对Cyber RT的学习记录,文章可能存在不严谨、不完善、有缺漏的部分࿰…...
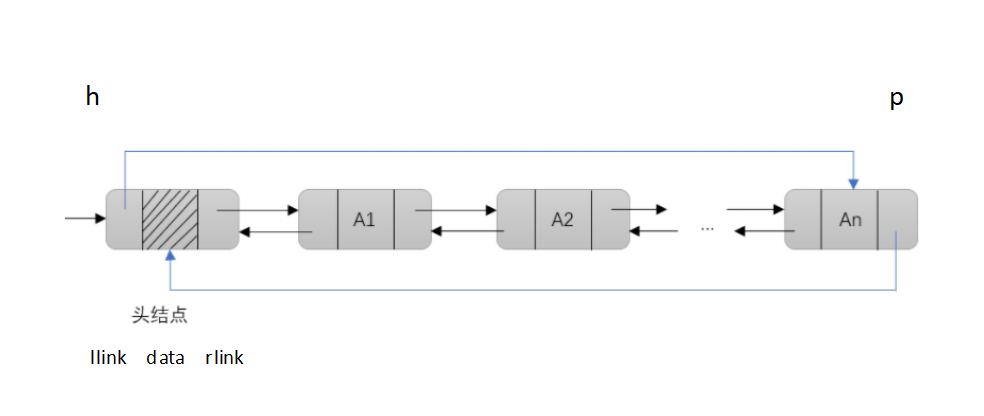
【数据结构】——线性表的相关习题
目录 题型一(线性表的存储结构)题型二(链表的判空)题型三(单链表的建立)题型四(顺序表、单链表的插入删除操作)题型五(双链表的插入删除操作)题型六ÿ…...
|(新版本Java API Client的Painless语言脚本script使用))
SpringBoot集成Elasticsearch8.x(8)|(新版本Java API Client的Painless语言脚本script使用)
SpringBoot集成Elasticsearch8.x(8)|(新版本Java API Client的Painless语言脚本script使用) 文章目录 SpringBoot集成Elasticsearch8.x(8)|(新版本Java API Client的Painless语言脚本script使用…...
Condition接口和@Conditional注解)
SpringBoot复习:(19)Condition接口和@Conditional注解
Condition接口代码如下: public interface Condition {boolean matches(ConditionContext context, AnnotatedTypeMetadata metadata);}它是一个函数式接口,只有一个方法matches用来表示条件是否满足。matches方法中的ConditionContext类对象context可以…...

K8s中的Controller
Controller的作用 (1)确保预期的pod副本数量 (2)无状态应用部署 (3)有状态应用部署 (4)确保所有的node运行同一个pod,一次性任务和定时任务 1.无状态和有状态 无状态&…...

【MFC】03.常用复杂控件的使用-笔记
热键: 对话框-类向导:初始化函数中,热键需要在最开始的时候就注册进去: 注册热键: 在这之前,先去定义一个宏,代表你这个快捷键。 参数:窗口句柄,热键编号(热…...

Autosar诊断实战系列14-NRC优先级解析
本文框架 前言1. NRC分类2. NRC优先级判断2.1. NRC优先级判断逻辑介绍2.2 NRC测试注意事项前言 在本系列笔者将结合工作中对诊断实战部分的应用经验进一步介绍常用UDS服务的进一步探讨及开发中注意事项, Dem/Dcm/CanTp/Fim模块配置开发及注意事项,诊断与BswM/NvM关联模块的应…...

《向量数据库指南》——腾讯云向量数据库Tencent Cloud VectorDB产品特性,架构和应用场景
腾讯云向量数据库(Tencent Cloud VectorDB)是一款全托管的自研企业级分布式数据库服务,专用于存储、检索、分析多维向量数据。该数据库支持多种索引类型和相似度计算方法,单索引支持 10 亿级向量规模,可支持百万级 QPS 及毫秒级查询延迟。腾讯云向量数据库不仅能为大模型提…...

xcode 的app工程与ffmpeg 4.4版本的静态库联调,ffmpeg内下的断点无法暂停。
先阐述一下我的业务场景,我有一个iOS的app sdk项目,下面简称 A ,以及运行 A 的 app 项目,简称 A demo 。 引用关系为 A demo 引用了 A ,而 A 引用了 ffmpeg 的静态库(.a文件)。此时业务出现了 b…...
)
机器学习06 数据准备-(利用 scikit-learn基于Pima Indian数据集作 数据特征选定)
什么是数据特征选定? 数据特征选定(Feature Selection)是指从原始数据中选择最相关、最有用的特征,用于构建机器学习模型。特征选定是机器学习流程中非常重要的一步,它直接影响模型的性能和泛化能力。通过选择最重要的特征&#…...
机器学习-特征选择:如何使用Lassco回归精确选择最佳特征?
一、引言 特征选择在机器学习领域中扮演着至关重要的角色,它能够从原始数据中选择最具信息量的特征,提高模型性能、减少过拟合,并加快模型训练和预测的速度。在大规模数据集和高维数据中,特征选择尤为重要,因为不必要的…...
SpringBoot之Actuator基本使用
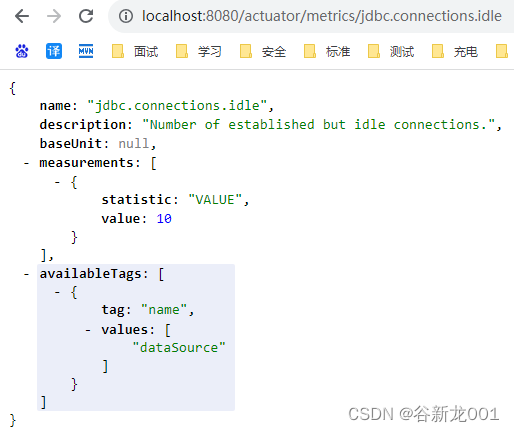
SpringBoot之Actuator基本使用 引入分类常用接口含义healthbeansconditionsheapdumpmappingsthreaddumploggersmetrics 引入 <!-- actuator start--> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter…...
)
排序算法(一)
1.冒泡排序-Bubble Sort 1.算法原理 依次比较相邻的两个元素,若按照从小到大的顺序,则将相邻元素中较大的一个放在后面;然后对每一对相邻元素都做这种比较,序列的最后一个元素就是最大的数; 2.算法复杂度 时间复杂度…...

Centos虚拟机忘记密码-修改密码
1.重启系统 2.在这个选择界面,按e建 3.找到如下位置,插入init/bin/sh 4.填写完成后按Ctrlx引导启动 5.输入mount -o remount, rw / (注意空格) 6.重置密码 出现以下为重置成功 7.执行touch /.autorelabel 8.退出exec /sbin/init 9.输入你的新密…...

Shell 分析服务器日志常用命令
1、查看有多少个IP访问: 日志文件的第一列是IP地址 awk {print $1} log_file|sort|uniq|wc -l2、查看某一个页面被访问的次数: grep "/index.php" log_file | wc -l3、查看每一个IP访问了多少个页面: awk {S[$1]} END {for (a i…...

mysql8配置binlog日志skip-log-bin,开启、关闭binlog,清理binlog日志文件
1.概要说明 binlog 就是binary log,二进制日志文件,这个文件记录了MySQL所有的DML操作。通过binlog日志我们可以做数据恢复,增量备份,主主复制和主从复制等等。对于开发者可能对binlog并不怎么关注,但是对于运维或者架…...

机器学习:训练集与测试集分割train_test_split
1 引言 在使用机器学习训练模型算法的过程中,为提高模型的泛化能力、防止过拟合等目的,需要将整体数据划分为训练集和测试集两部分,训练集用于模型训练,测试集用于模型的验证。此时,使用train_test_split函数可便捷高…...
简单介绍淘宝API功能接口作用)
淘宝API开发(一)简单介绍淘宝API功能接口作用
前一阵子按照上级指示,根据淘宝API开发符合自已应用的系统,比如批量上传,批量修改名称,价格等功能什么的,在此就将我的开发历程写一写,为自己前段时间的工作做个总结。 淘宝开发平台(淘宝网 - 淘ÿ…...

Redis相关面试题
Redis的使用场景 根据自己简历上的业务进行回答 缓存 穿透、击穿、雪崩、双写一致、持久化、数据过期、淘汰策略 分布式锁 setnx redisson 缓存穿透:查询一个不存在的数据,数据库查不到数据也不会直接写入缓存,就会导致每次请求都查询数据库…...

数据库简介
1、数据库安装: rpm (redhat package manager) 也是个包管理工具: rpm -ivh 安装 rpm -e 表示卸载,卸载的时候有可能出现依赖的问题,可以用 --nodeps 忽略依赖卸载。 rpm -qa 搜索系统中安装的rpm的应用。 如果使用离线包,安装顺序不要乱。 m…...

Android 相机有线连接开发复盘:PTP/MTP 协议适配与稳定性实践
一、项目背景在做一个相机互联类 App 的过程中,我们需要在 Android 设备上通过 USB 有线方式 连接相机,实现:遥控拍摄实时获取照片稳定地进行文件同步最初评估时以为只要调用系统 API 就能跑起来,但实际开发中发现,标…...

FanControl终极指南:5分钟让你的Windows风扇控制既智能又安静
FanControl终极指南:5分钟让你的Windows风扇控制既智能又安静 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Tren…...
)
告别轮询!用STM32CubeMX和DMA实现ADC多通道‘无感’采集与串口打印(附完整工程)
告别轮询!STM32CubeMX与DMA实现ADC多通道无感采集实战指南 在嵌入式开发中,数据采集系统的效率往往决定了整个应用的性能上限。传统轮询方式不仅消耗大量CPU资源,还会引入不可预测的延迟。想象一下,当你需要同时监测多个环境传感器…...

Faster-Whisper-GUI:高效本地语音识别与字幕生成终极指南
Faster-Whisper-GUI:高效本地语音识别与字幕生成终极指南 【免费下载链接】faster-whisper-GUI faster_whisper GUI with PySide6 项目地址: https://gitcode.com/gh_mirrors/fa/faster-whisper-GUI 在人工智能语音技术快速发展的今天,本地化语音…...

Taotoken API密钥管理与访问控制功能初体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken API密钥管理与访问控制功能初体验 1. 引言 在将大模型能力集成到实际应用或团队协作流程中时,API密钥的管理…...

Go语言并发优化:Goroutine调度
Go语言并发优化:Goroutine调度 1. GOMAXPROCS func main() {numCPU : runtime.NumCPU()runtime.GOMAXPROCS(numCPU) }2. 总结 合理设置GOMAXPROCS可以充分利用多核CPU,提高并发性能。...

Nano-vLLM 源码解读 - 9. 抢占机制
nano-vllm 用千行代码拆解 vLLM 核心,是读懂大模型推理最快的捷径。 L07 第 5 节讲过 schedule() 的 decode 分支大致结构,其中提到一句:“decode 在块边界处可能装不下,装不下就走 preempt”,当时把细节明确推迟到本节。 那段代码不到 10 行,却同时回答三个问题:decode 在什么…...

TI毫米波雷达实战:从mmWave Studio配置到3D-FFT点云生成的保姆级教程
TI毫米波雷达实战:从硬件连接到3D-FFT点云生成的完整指南 毫米波雷达技术正在工业检测、自动驾驶和智能家居领域掀起革命。作为TI毫米波雷达开发的核心工具链,mmWave Studio与DCA1000的组合为工程师提供了从信号采集到高级处理的完整解决方案。本文将带您…...

TLV320AIC3254音频编解码器:核心架构、配置实战与典型应用
1. 项目概述:从一颗“全能”音频芯片说起最近在做一个需要高保真音频采集和处理的嵌入式项目,选型时又一次把目光投向了TI的TLV320AIC3254。这颗芯片在音频工程师的圈子里名气不小,常被戏称为“音频界的瑞士军刀”。它本质上是一颗超低功耗的…...
)
别再死循环了!手把手教你用Python实现D*算法(附完整代码与避坑指南)
从理论到实践:Python实现D*算法的工程化指南与避坑策略 路径规划中的动态适应挑战 在机器人导航和游戏AI开发中,路径规划算法扮演着至关重要的角色。传统算法如A*和Dijkstra虽然能有效解决静态环境下的路径规划问题,但在动态变化的环境中却显…...